
- Как проверить шаговый двигатель мультиметром? – Рекомендации по монтажу и обслуживанию электрических сетей и приборов
- Схема шагового двигателя
- Метки: микроконтроллер рхх
- Важно! Проверка шаговых двухобмоточных двигателей Фокуса и Зума
- ювимас
- Рыбку съесть и.. 4 Max Pro 2.0 vs Tronxy X5SA Pro
- Изучаем миниатюрный шаговый двигатель
- Знакомство
- Эксперимент №1. L293D + ATtiny44
- Устройство и принцип работы
- Популярные заблуждения о шаговых электродвигателях и их разъяснения
- Температура
- Микрошаговый режим
- Номинальное напряжение и напряжение питания
- Что делать, если двигатель пропускает шаги?
- Проверка шагового двигателя.
- Управление скоростью двигателя с помощью ШИМ сигнала
Как проверить шаговый двигатель мультиметром? – Рекомендации по монтажу и обслуживанию электрических сетей и приборов
Метки: микроконтроллер рхх. Собрал еще один контроллер шагового двигателя для проверки мотора РХХ. Первый вариант был на Atmega8 с кнопочным управлением, можно посмотреть у меня в БЖ, это второй вариант на Attiny2313 с управлением энкодером. Интересен он тем, что не нужно заранее искать и прозванивать обмотки АB и CD на шагово…
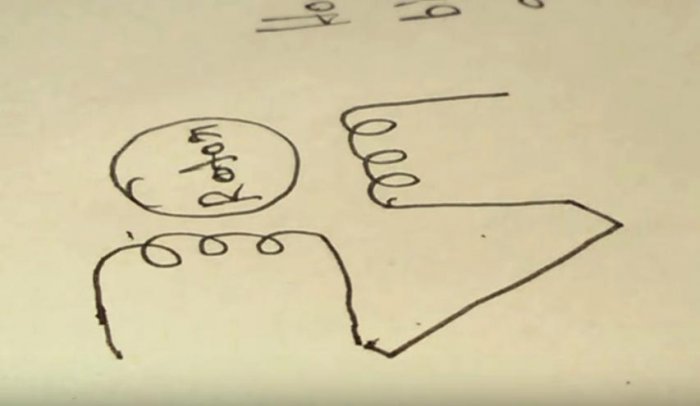
Схема шагового двигателя
Его схема обмоток выглядит примерно так:
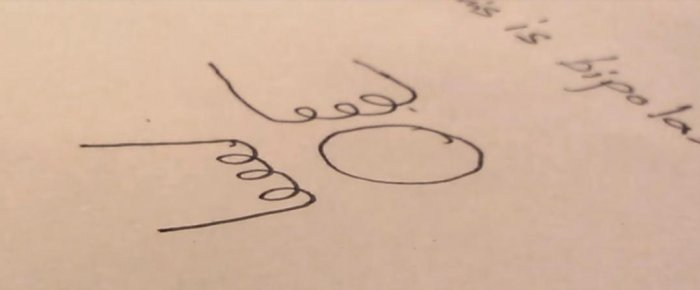
Очень похоже на схему обычного асинхронного двигателя.
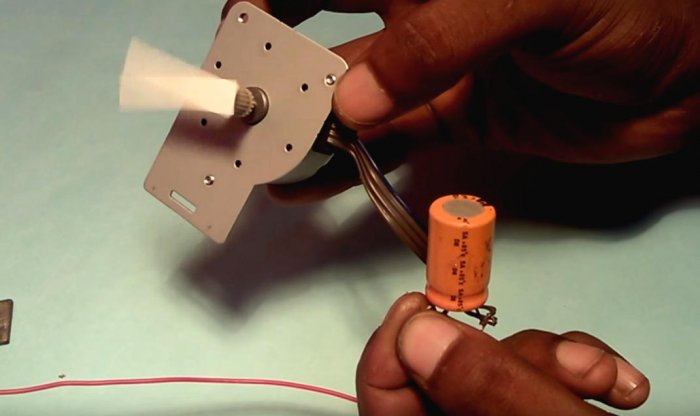
Для запуска понадобится:
- Конденсатор емкостью 470-3300 мкФ.
- Источник переменного тока 12 В.
Замыкаем обмотки последовательно.
Середину проводов скручиваем и запаиваем.
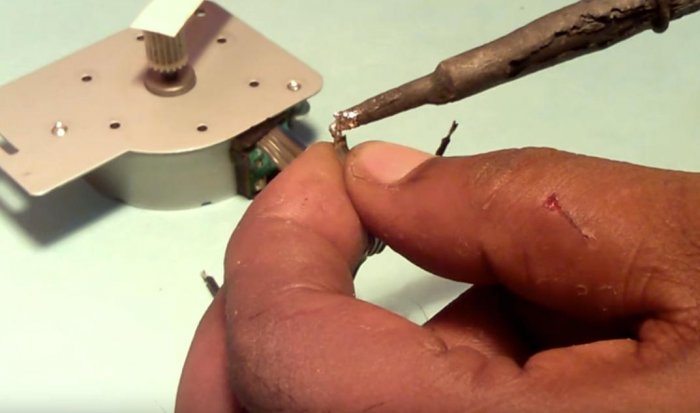
Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток.
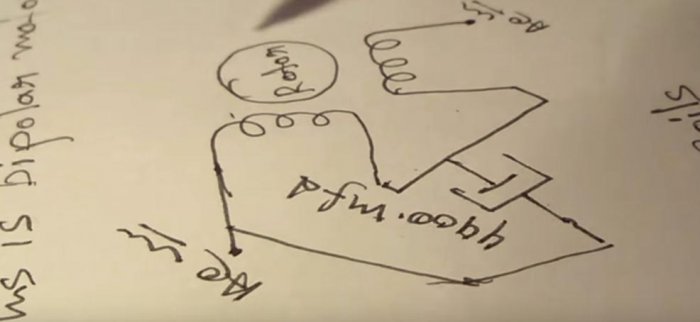

Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону.
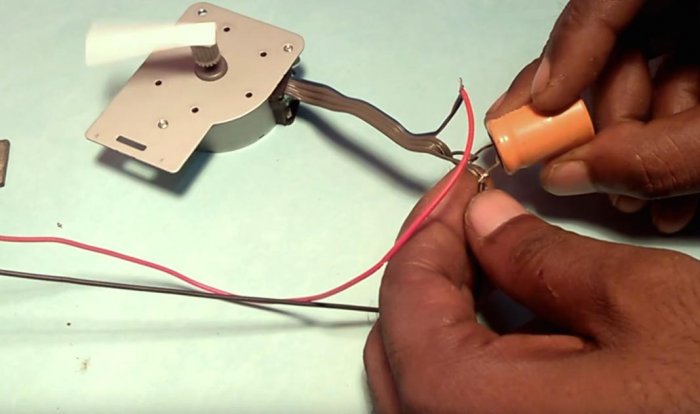
Все предельно просто. А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится.
Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Метки: микроконтроллер рхх
Участвовать в обсуждениях могут только зарегистрированные пользователи.
Важно! Проверка шаговых двухобмоточных двигателей Фокуса и Зума
Недавно рыл форум и нашел очень полезную вещь в плане проверки двухобмоточных двигателей фокуса и зума. Может кто-то уже использует эту методу, но мне понравилось и решил поделиться. В качестве источника питания используем большой шаговый двигатель от старого факса с шестеренкой на валу (чтобы было удобнее крутить). Определить, что именно этот двигатель подойдет очень просто — при вращении за вал ощущаются мелкие «шаги» полюсов ротора по полюсам статора. Дальше все просто. Если у двигателя 6 выводов — две обмотки со средней точкой — используем крайние, а средние точки убираем, чтобы не мешали. Припаиваем обмотки на испытуемый двигатель и крутим шестеренку — испытуемый двигатель дложен вращаться. Проверено и работает, мало того, пару раз удавалось раскрошить таким образом мусор, попавший в движок Напряжения хватает вполне и для вращения движка в составе оптики, без разборки.
ЗЫ Это не шутка, на дату можно не смотреть.
ювимас
Рыбку съесть и.. 4 Max Pro 2.0 vs Tronxy X5SA Pro
Доброго времени суток!
Есть огромное желание влиться в мир 3D печати и, что немаловажно, достаточно объемная конкретная задача. …
Изучаем миниатюрный шаговый двигатель

Шаговые двигатели нашли широкое применение в современной промышленности и самоделках. Их используют там, где необходимо обеспечить точность позиционирования механических узлов, не прибегая к помощи обратной связи и точным измерениям. Сегодня хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Мы подробно рассмотрим их устройство и способы управления такими крошечными моторчиками.
Шаговый двигатель — бесколлекторный (бесщёточный) электрический двигатель с несколькими обмотками (фазами), расположенными на статоре и магнитами (часто постоянными) на роторе. Подавая напряжения на обмотки статора, мы можем фиксировать положение ротора, а подавая напряжение на обмотки последовательно можно получить перемещение ротора из одного положения в другое (шаг), причём этот шаг имеет фиксированную угловую величину.
Мы не будем останавливаться на рассмотрении каждого типа шагового двигателя.
Об этом в сети написано довольно много и хорошо, например здесь.
Хочу поговорить об особой разновидности шаговых моторов — миниатюрные шаговые двигатели, которые применяются в конструкциях оптических систем. Такие малыши имеются в свободной продаже. Но в сети, особенно в русскоязычной, очень мало информации по таким моторчикам. Потому, когда мне потребовалось использовать их в своём проекте, пришлось изрядно поискать информации и провести пару экспериментов. Результатами своих поисков и экспериментами я поделюсь в этой статье. Мы рассмотрим вопросы управления такими маленькими моторчиками, а именно:
- драйвер L293D + микроконтроллер ATtiny44;
- драйвер TMC2208 + микроконтроллер ATtiny44;
- микроконтроллер ATtiny44 (без драйвера).
Собственно вопросы тут может вызвать только последний пункт. Поверьте, я тоже был удивлён, когда наткнулся на ролик (вот он), где парень просто берёт и напрямую цепляет шаговый мотор к пинам микроконтроллера! Но давайте обо всём по порядку.
Знакомство
Сначала немного посмотрим на внешний вид нашего героя: Он действительно очень маленький! Согласно умной книжке Петренко С.Ф.
«Пьезоэлектрические двигатели в приборостроении», меньших размеров электромагнитные моторчики создать в принципе невозможно… то есть возможно, но с уменьшением диаметра проволоки, из которой изготавливают обмотки, всё больше энергии рассеивается в виде тепла в окружающую среду, что приводит к уменьшению КПД моторчика и делает их использование нерациональным.
Из примечательного, можно отметить, что его вал очень короткий и имеет специальную проточку для установки шестерни или рычага.
Отчётливо видны две обмотки, которые даже покрыты изоляцией разного цвета. Значит, наш моторчик относится, скорее всего, к классу биполярных шаговых двигателей.
Посмотрим как он устроен:
Считаю, наше знакомство с этими моторчиками будет не полным, если мы не посмотрим, что же у него внутри. Ведь всегда интересно заглянуть внутрь механизма! Разве нет?
Собственно, ничего необычного мы не увидели. Ротор намагничен. Подшипников нигде не наблюдается, всё на втулках. Задняя втулка запрессована в корпус двигателя. Передняя ничем не закреплена. Интересно, что корпус двигателя собирался точечной сваркой. Так что переднюю крышку корпуса пришлось спиливать. Теперь перейдём к вопросу подключения и его электрическим характеристикам.
Убедимся, что он биполярный, прозвонив обмотки. Действительно биполярный, всё как на картинке выше. Сопротивление обмоток около 26Ом, хотя продавец указал 14Ом.
В описании сказано, что напряжение питания 5В. Хотя мы то с вами знаем, что для шагового двигателя важен ток, который будут потреблять его обмотки. Пробуем подключить.
Эксперимент №1. L293D + ATtiny44
Как мы знаем, для управления биполярным шаговым двигателем необходимо не просто прикладывать напряжения к двум обмоткам в нужной последовательности, но и изменять направление тока в этих обмотках, причём делать это независимо друг от друга. Для этого на каждую обмотку нужен собственный Н-мост. Чтобы не городить его из транзисторов, был взят готовый в лице микросхемы L293D.
Ещё одно её преимущество — у микросхемы имеются специальные выводы Enable1 и Enable2, который включают и выключают каждый мост. Их можно использовать чтобы подавать ШИМ сигнал, тем самым, возможно контролировать напряжения питания каждого моста. Зачем это может понадобиться, мы увидим дальше.
Кроме того, L293D может коммутировать напряжения до 36В и выдавать до 1,2А на каждый канал, чего вполне должно хватить для питания обмоток нашего моторчика.
Итак, схема: Управляющие входы L293D подключены к выходам OC0A и OC0B, что позволит в будущем подавать на них ШИМ сигнал. Прошивать контроллер будем через внутрисхемный программатор (на схеме не указан). Вот как выглядит собранная схема на макетной плате: И вот так расположен наш подопытный: Теперь можно приступать к экспериментам. Рассчитаем ток, который будет течь через обмотки двигателя при подключении их к напряжению 5В: I=U/R = 5В/26Ом = 190мА Совсем небольшой. Интересно как долго он сможет держать такой ток и не перегреться. Включим в цепь одной из обмоток амперметр и вольтметр, и проведём замеры соответствующих величин при подачи питания на эту обмотку через драйвер.
При падении напряжения на обмотке 2.56В амперметр показывает ток 150мА, причём хорошо заметно, как начинает падать величина силы тока в процессе нагревания обмоток. Надо отметить, что не так уж и сильно он греется.
Убедившись, что напряжение 5В для моторчика опасности не представляет, попробуем покрутить им в разные стороны. И вот теперь пару слов мы скажем про режимы работы шагового двигателя.
Об этом довольно хорошо сказано здесь.
Не будем повторяться, но вспомним, что шаговый двигатель может работать в трёх режимах:
- Полношаговый однофазный это когда одновременно напряжение подаётся только на одну фазу двигателя, ротор делает шаг, затем текущая фаза выключается и включается следующая.
- Полношаговый двухфазный это когда напряжение подаётся одновременно на две фазы мотора, при этом, ротор притягивается одновременно к двум обмоткам, что создаёт больший крутящий момент.
- Микрошаговый режим в этом случае реализуется тот же принцип, что и на полношаговом двухфазном, то есть работают одновременно две обмотки, но напряжение (и как следствие ток) распределяется между ними неравномерно. Фактически, это означает, что мы можем поставить моторчик в неограниченное количество положений (на практике, разумеется, такого сделать нельзя). Увеличивается точность позиционирования.
Попробуем реализовать первые два режима на микросхеме L293D а для микрошагового режима оставим специальный драйвер из второго эксперимента. Исходный код программы выглядит следующим образом: Исходный код в среде WinAVR #define F_CPU 8000000UL // указываем частоту в герцах // фьюзы необходимо выставить L: E2; H:DF; Ex:FF; // это будет частота 8МГц от внутреннего генератора с выключенным предделителем тактовый частоты (включен по умолчанию и равен 8) #include // подключаем библиотеку АВР #include // подключаем библиотеку задержек #include // подключаем библиотеку прерываний // управление штатным светодиодом #define LED_pin PA5 #define LED_ON PORTA |=(1
Устройство и принцип работы
 Рис. 1. Принцип действия шагового двигателя
Рис. 1. Принцип действия шагового двигателя
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Популярные заблуждения о шаговых электродвигателях и их разъяснения

Даже опытные инженеры часто имеют не совсем верное представление о шаговых электродвигателях и способах управления ими. В данной статье мы разберем лишь несколько основных заблуждений что, надеюсь, поможет и новичкам и бывалым инженерам при выборе драйверов управления. Было бы хорошо разобрать все особенности, но тогда эта статья превратилась бы в книгу.
В этой статье речь пойдет о биполярных шаговых электродвигателях, поскольку они являются наиболее популярными в использовании на сегодняшний день. Униполярные шаговые электродвигатели все еще используются в некоторых устройствах, однако их популярность с каждым годом снижается. Это снижение обуславливается преобладанием относительно недорогих драйверов для биполярных двигателей. Учитывая снижение стоимости управления, почему бы не использовать биполярные шаговые электродвигатели? В конце концов у них есть еще один плюс – больший крутящий момент.
Температура
Многие инженеры ошибочно полагают, что если шаговый электродвигатель имеет небольшой размер, значит, его температура тоже должна быть небольшой. Этот миф легко развеять, взяв документацию на электрическую машину, пирометр, и произвести замер. То, что при касании может показаться «очень горячим», на самом деле не будет даже подходить к максимально допустимой температуре машины.
Шаговые электродвигатели обычно имеют повышенную температуру, это связано с внутренними процессами в самой машине. Даже когда они не вращаются они также подвержены потерям. Тем не менее, если вы сомневаетесь – перестрахуйтесь и проверьте температуру.
Естественно, если температура превысит предельно допустимую, указанную в паспорте, это может привести к необратимым последствиям (выход из строя или значительное сокращение срока службы).
В случаях, когда есть необходимость снизить потребление электроэнергии в режиме простоя, можно использовать специальные драйверы, в которые данная функция включена. Однако это повлияет не только на значение тока в обмотках, но и на удерживающий момент, что в определенных механизмах тоже важно.
Микрошаговый режим
Микрошаги это не магия. Существуют специальные драйверы для микрошагового управления. Это позволяет увеличить точность позиционирования, однако достигается за счет значительного крутящего момента. Кроме того, наличие драйвера, обеспечивающего шаг 1/32, не значит, что ваш электродвигатель сможет это реализовать. После определенного порога (1/10 и иногда 1/16) требуются высококачественные драйверы и двигатели. Даже если ваш шаговый электродвигатель и драйвер смогут реализовать микрошаг в 1/32, возможно ли это интегрировать в общую систему управления?
Рассмотрим следующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта напрямую соединенного с типичным шаговым двигателем, имеющим 200 шагов на оборот. Каждый полный шаг электрической машины будет переведен в 0,0005 дюйма линейного движения. Казалось бы, что, якобы, та же система микрошагов 1/32 сможет уменьшить линейный шаг до 0,000015. Но в реальности реализации данной системы практически не возможна, так как упругость и силы трения не позволят преобразовать настолько миниатюрные шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электрической машиной на резонанс. Это дает определенные возможности для избегания резонанса. Как известно, любая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение этой частоты, как правило, происходит на определенной скорости, после чего двигатель начнет сильно шуметь.
Эти шумы могут привести к «пропусканию шагов», что чревато серьезными последствиями для определенных систем. В некоторых случаях это может привести к слишком большим вибрациям. В случаях с режущими машинами, такими как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки.
Микрошаговый режим уменьшает расстояние пройденное валом между шагами (на появление шумов тратится меньше энергии).
Номинальное напряжение и напряжение питания
Наверное, одним из самых запутанных моментов является несоответствие напряжения на обмотке, указанного в паспорте машины, и реального напряжения источника питания, используемого для питания электрической машины. Если в техпаспорте указывается напряжение обмотки равное 3,4 В, то как получается, что электродвигатель подключается к источнику 48 В постоянного тока? Или иногда и к 80 В.
Номинальное напряжение не настолько критично, обратите внимание на ток.
Такое подключение стало возможным благодаря тому, что большинство современных драйверов имеют встроенное ШИМ управление выходным напряжением. Драйверы контролируют ток обмотки. Когда ток доходит до максимального значения (определяется максимальным током электрической машины), драйвер отключает питание, или снижает значение тока. При этом превышать максимальное напряжение драйвера нельзя.
Рассмотрим небольшой пример на основе шагового электродвигателя с номинальными данными: Uн = 12 В, Iн = 0,33 А, активное сопротивление обмотки R = 32,6 Ом, реактивное сопротивление обмотки L = 48 мГн.
12 В – это не максимально допустимое напряжение. Это напряжение нормальной работы, при котором в обмотке будет протекать ток равный 0,33 А.
Если вы управляете электрической машиной с помощью очень простого или Н-мостового драйвера, то вам необходимо ограничивать напряжение 12 В для предотвращения превышения номинального тока.
В случае использования драйвера с прерывателем (chopper drive), превышение номинального напряжения не является проблемой. Чем выше будет напряжение – тем быстрее машина достигнет магнитного насыщения. Приведенная ниже формула это иллюстрирует:
Приведенная формула вычисляет ток обмотки электродвигателя за определенный промежуток времени.
Ток, через катушку индуктивности 50 мГн, в течении 1 мс увеличивается пропорционально напряжению.
Если двигатель «перешагнет» прежде, чем сможет достаточно насытиться для развития необходимого момента, он начнет «терять» шаги. Если вы обнаружите, что такое происходит с вашей машиной на большом ходу – рассмотрите вариант повышения напряжения питания.
Что делать, если двигатель пропускает шаги?
Иногда в нашу поддержку приходят подобные сообщения:
«Столкнулся с проблемой: шаговик пропускает импульсы при быстром перемещении. Проверил движение кареток, клинов нет, движение плавное. В чем может быть причина?» .
Наиболее вероятные причины, почему шаговые двигатели (ШД) могут терять шаги:
— неправильно настроен драйвер ШД (выставлен заниженный рабочий ток, низкое напряжение питания);
— ШД перегружен механически;
— ШД попадает в резонанс;
— подклинивает механику (направляющие, передачи);
— проворачивание элементов передачи на валу может выглядеть как пропуск шагов;
— неправильно генерируются сигналы STEP/DIR или имеется дефект на линии передачи сигналов STEP/DIR;
— существует проблема в аппаратной части — повреждены кабели, обмотки ШД и т. п.
Причиной пропуска шагов при работе с Mach3 через LPT-порт может быть:
— неправильно настроенная программа Mach3;
— запущенно программное обеспечение, которое мешает работе Mach3 (излишне грузит ресурсы компьютера);
— неисправность LPT-порта, так как не все LPT-порты нормально работают с Mach3.
Для надежной работы рекомендуем использовать современный программно-аппаратный комплекс PUMOTIX в связке с контроллерами PLCM. Данные контроллеры обладают встроенными микропроцессорами, благодаря которым станок стабильно работает на ПК, ноутбуках и нетбуках.
Проверка шагового двигателя.
Неделю мучился с принтером, лезут какие-то непонятные глюки при печати, и не мог понять, в чем причина. Вылечилось заменой одного из шаговиков на точно такой же, из той же партии.
Проверил — вал крутится свободно, без подклиниваний, шаги без нагрузки не пропускает, сопротивление обмоток в норме, неконтакта нигде нету. Какакя-то мистика. Как проверить/починить шаговик? Жалко выбрасывать из-за просто подозрения.
Управление скоростью двигателя с помощью ШИМ сигнала
Управлять скоростью двигателя можно снижая подачу тока. Для этого вместо постоянного сигнала (на порты PB0, PB1, PB2, PB3) подается сигнал ШИМ. Суть ШИМ сигнала состоит в том, что это не постоянный сигнал, а быстрое включение и выключение. При этом интервал выключения можно изменять и направлять больше или меньше тока двигателю. Чем больше интервал выключения, тем медленней двигатель будет крутиться. В микроконтроллере AVR существует 2 способа получения ШИМ сигнала – программный ШИМ и аппаратный ШИМ.
Программный ШИМ делается на отдельном контроллере просто записью в него программы, этот контроллер подключается к уже имеющемуся контроллеру и сигнал идет не напрямую от ATmega16 к IR2101, а через этот ШИМ контроллер. Такое можно сделать на более мелком контроллере, например, ATtiny2313, программа для ATtiny2313, которая превращает его в программный ШИМ контроллер, вот она, эта программа на языке AVR Assembler…
Источник



