
- Лазерный гравер своими руками: материалы, сборка, установка программного обеспечения
- Необходимые материалы
- Электрическая часть самодельного лазерного гравера
- Процесс сборки
- Установка программного обеспечения
- Особенности использования контуров
- Окончательная настройка и подготовка к работе
- МозгоЧины
- Делаем лазерный гравер «Франкенштейн» — часть 1
- Делаем лазерный гравер «Франкенштейн» — часть 1
- Шаг 1: Поиск кандидатов на разбор
- Шаг 2: Разбор сканера
- Шаг 3: Операции с принтером — часть 1
- Шаг 4: Операции с принтером — часть 2
- Шаг 5: Проводка — часть 1
- Шаг 6: «Магия» для «волшебного черного кирпича»
- Шаг 7: Сборка электроцепи на макетке
- Шаг 8: Калибровка
- Шаг 9: Первый контакт
Лазерный гравер своими руками: материалы, сборка, установка программного обеспечения
Многие из тех домашних умельцев, которые в своей мастерской занимаются изготовлением и декоративным оформлением изделий из древесины и других материалов, наверняка задумывались над тем, как сделать лазерный гравер своими руками. Наличие такого оборудования, серийные модели которого стоят достаточно дорого, позволяет не только наносить на поверхность обрабатываемого изделия сложнейшие рисунки с высокой точностью и детализацией, но и осуществлять лазерную резку различных материалов.
Самодельный лазерный станок в процессе гравировки по дереву
Самодельный лазерный гравер, который обойдется значительно дешевле, чем серийная модель, можно изготовить даже в том случае, если вы не обладаете глубокими знаниями в электронике и механике. Лазерный гравер предлагаемой конструкции собирается на аппаратной платформе «Ардуино» (Arduino) и имеет мощность 3 Вт, тогда как у промышленных моделей этот параметр составляет не менее 400 Вт. Однако даже такая невысокая мощность позволяет использовать данный аппарат для резки изделий из пенополистирола, пробковых листов, пластика и картона, а также выполнять качественную лазерную гравировку.
Этот гравер справится и с тонким пластиком
Необходимые материалы
Для того чтобы самостоятельно изготовить лазерный гравер на Arduino, потребуются следующие расходные материалы, механизмы и инструменты:
- аппаратная платформа Arduino R3;
- плата Proto Board, оснащенная дисплеем;
- шаговые двигатели, в качестве которых можно использовать электромоторы из принтера или из DVD-плеера;
- лазер, мощность которого составляет 3 Вт;
- устройство для охлаждения лазера;
- регулятор напряжения постоянного тока DC-DC;
- транзистор MOSFET;
- электронные платы, при помощи которых осуществляется управление двигателями лазерного гравера;
- выключатели концевого типа;
- корпус, в котором можно разместить все элементы конструкции самодельного гравера;
- зубчатые ремни и шкивы для их установки;
- шарикоподшипники различных типоразмеров;
- четыре деревянных доски (две из них с размерами 135х10х2 см, а две другие – 125х10х2 см);
- четыре металлических стержня круглого сечения, диаметр которых составляет 10 мм;
- болты, гайки и винты;
- смазочный материал;
- стяжки-хомуты;
- компьютер;
- сверла различного диаметра;
- циркулярная пила;
- наждачная бумага;
- тиски;
- стандартный набор слесарных инструментов.

Наибольшего вложения потребует электронная часть станка
Электрическая часть самодельного лазерного гравера
Основным элементом электрической схемы представленного устройства является лазерный излучатель, на вход которого должно подаваться постоянное напряжение со значением, не превышающим допустимых параметров. Если не соблюсти данное требование, лазер может просто сгореть. Лазерный излучатель, используемый в гравировальной установке представленной конструкции, рассчитан на напряжение 5 В и силу тока, не превышающую 2,4 А, поэтому настройка регулятора DC-DC должна быть выполнена на силу тока 2 А и напряжение до 5 В.
Электрическая схема гравера
Транзистор MOSFET, который является важнейшим элементом электрической части лазерного гравера, необходим для того, чтобы, получая сигнал от контроллера «Ардуино», включать и выключать лазерный излучатель. Электрический сигнал, вырабатываемый контроллером, является очень слабым, поэтому воспринимать его, а затем отпирать и запирать контур питания лазера может только транзистор MOSFET. В электрической схеме лазерного гравера такой транзистор устанавливается между плюсовым контактом лазера и минусовым регулятора постоянного тока.
Шаговые электродвигатели лазерного гравера подключаются через одну электронную плату управления, что обеспечивает синхронность их работы. Благодаря такому подключению зубчатые ремни, приводимые в движение несколькими двигателями, не провисают и сохраняют стабильное натяжение в процессе своей работы, что обеспечивает качество и точность выполняемой обработки.
Следует иметь в виду, что лазерный диод, используемый в самодельной гравировальной установке, не должен перегреваться.
Для этого необходимо обеспечить его эффективное охлаждение. Решается такая задача достаточно просто: рядом с диодом устанавливают обычный компьютерный вентилятор. Чтобы исключить перегрев плат управления работой шаговых электродвигателей, рядом с ними также размещают компьютерные кулеры, так как обычные радиаторы с такой задачей не справляются.
Фотографии процесса сборки электросхемы
Процесс сборки
Самодельный гравировальный станок предложенной конструкции – это устройство челночного типа, один из подвижных элементов которого отвечает за перемещение по оси Y, а два других, спаренных, – за перемещение по оси X. За ось Z, которая также оговаривается в параметрах такого 3D-принтера, принимается глубина, на которую осуществляется прожиг обрабатываемого материала. Глубина отверстий, в которые устанавливаются элементы челночного механизма лазерного гравера, должна составлять не менее 12 мм.
Рамка рабочего стола – размеры и допуски
В качестве направляющих элементов, по которым будет перемещаться рабочая головка лазерного гравировального устройства, могут выступать алюминиевые стержни диаметром не менее 10 мм. Если найти стержни из алюминия не представляется возможным, для этих целей можно использовать стальные направляющие такого же диаметра. Необходимость применения стержней именно такого диаметра объясняется тем, что в таком случае рабочая головка лазерного гравировального устройства не будет провисать.
Изготовление подвижной каретки
Поверхность стержней, которые будут использоваться в качестве направляющих элементов для лазерного гравировального устройства, надо очистить от заводской смазки и тщательно отшлифовать до идеальной гладкости. Затем на них следует нанести смазывающий состав на основе белого лития, который улучшит процесс скольжения.

Установка шаговых двигателей на корпус самодельного гравировального устройства осуществляется при помощи кронштейнов, изготовленных из листового металла. Чтобы сделать такой кронштейн, лист металла, ширина которого приблизительно соответствует ширине самого двигателя, а длина в два раза превышает длину его основания, сгибают под прямым углом. На поверхности такого кронштейна, где будет располагаться основание электромотора, сверлят 6 отверстий, 4 из которых необходимы для фиксации самого двигателя, а два остальных – для крепления кронштейна к корпусу при помощи обычных саморезов.
Для установки на вал электромотора приводного механизма, состоящего из двух шкивов, шайбы и болта, также используется кусок металлического листа соответствующего размера. Чтобы смонтировать такой узел, из металлического листа формируют П-образный профиль, в котором просверливаются отверстия для его крепления к корпусу гравера и для выхода вала электродвигателя. Шкивы, на которые будут надеваться зубчатые ремни, насаживаются на вал приводного электромотора и размещаются во внутренней части П-образного профиля. Надетые на шкивы зубчатые ремни, которые должны приводить в движение челноки гравировального устройства, соединяются с их деревянными основаниями при помощи саморезов.
Установка шаговых двигателей
Установка программного обеспечения
Вашему лазерному гроверу, который должен работать в автоматическом режиме, потребуется не только установка, но и настройка специального программного обеспечения. Важнейшим элементом такого обеспечения является программа, которая позволяет создавать контуры желаемого рисунка и преобразовывать их под расширение, понятное управляющим элементам лазерного гравера. Такая программа имеется в свободном доступе, и ее можно без особых проблем скачать на свой компьютер.
Программа, скачанная на управляющий гравировальным устройством компьютер, распаковывается из архива и устанавливается. Кроме того, вам потребуется библиотека контуров, а также программа, которая будет отправлять данные по создаваемому рисунку или надписи на контроллер «Ардуино». Такую библиотеку (как и программу для передачи данных на контроллер) также можно найти в свободном доступе. Для того чтобы ваша лазерная самоделка работала корректно, а гравировка, выполняемая с ее помощью, была качественной, вам потребуется настройка и самого контроллера под параметры гравировального устройства.
Особенности использования контуров
Если с вопросом о том, как сделать ручной лазерный гравер, вы уже разобрались, то необходимо прояснить и вопрос о параметрах контуров, которые могут наноситься при помощи такого устройства. Такие контуры, внутренняя часть которых не заполняется даже в том случае, если исходный рисунок закрашен, должны передаваться на контроллер гравера файлами не в пиксельном (jpeg), а векторном формате. Это значит, что изображение или надпись, наносимые на поверхность обрабатываемого изделия при помощи такого гравера, будут состоять не из пикселей, а из точек. Такие изображения и надписи можно как угодно масштабировать, ориентируясь на площадь поверхности, на которую они должны быть нанесены.
При помощи лазерного гравера на поверхность обрабатываемого изделия можно нанести практически любой рисунок и надпись, но для этого их компьютерные макеты необходимо перевести в векторный формат. Выполнить такую процедуру несложно: для этого используются специальные программы Inkscape или Adobe Illustrator. Файл, уже переведенный в векторный формат, необходимо преобразовать еще раз, чтобы его смог корректно воспринимать контроллер гравировальной установки. Для такого преобразования используется программа Inkscape Laserengraver.
Окончательная настройка и подготовка к работе
Изготовив лазерный гравировальный станок своими руками и закачав в его управляющий компьютер необходимое программное обеспечение, не приступайте к работе сразу: оборудование нуждается в окончательной настройке и регулировке. В чем заключается такая регулировка? Прежде всего необходимо убедиться, что максимальные перемещения лазерной головки станка по осям X и Y совпадают со значениями, полученными при преобразовании векторного файла. Кроме того, в зависимости от толщины материала, из которого изготовлено обрабатываемое изделие, надо отрегулировать параметры тока, подаваемого на лазерную головку. Делать это нужно для того, чтобы не прожечь изделие, на поверхности которого требуется выполнить гравировку.
Очень важным и ответственным процессом является точная настройка (юстировка) лазерной головки. Юстировка нужна для того, чтобы отрегулировать мощность и разрешение луча, вырабатываемого лазерной головкой вашего гравера. На дорогих серийных моделях лазерных гравировальных установок юстировка выполняется при помощи дополнительного маломощного лазера, установленного в основную рабочую головку. Однако в самодельных граверах, как правило, используются недорогие лазерные головки, поэтому такой способ точной настройки луча для них не подходит.
Испытайте свой самодельный лазерный гравер сначала на простых рисунках
Достаточно качественная юстировка самодельного лазерного гравера может быть выполнена при помощи светодиода, извлеченного из лазерной указки. Провода светодиода подсоединяются к источнику питания с напряжением 3 В, а сам он фиксируется на рабочем конце штатного лазера. Попеременно включая и регулируя положение лучей, исходящих от тестового светодиода и лазерной головки, добиваются их совмещения в одной точке. Удобство использования светодиода от лазерной указки заключается в том, что юстировка с его помощью может выполняться без риска нанесения вреда как рукам, так и глазам оператора гравировальной установки.
Видеоролик показывает процесс подключения гравера к компьютеру, настройку софта и подготовку станка к работе.
Источник
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Делаем лазерный гравер «Франкенштейн» — часть 1
Делаем лазерный гравер «Франкенштейн» — часть 1

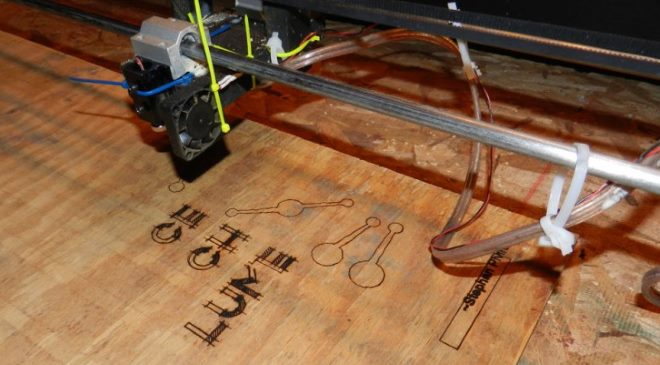
Доброго времени суток, мозгочины! Лазерный резак описываемый в этой статье, был собран из старых принтера и сканера, и носит говорящее название «Франкенштейн». Заинтересовало? Тогда читаем далее…
Создание этого мозгорезака развивалось вокруг руководства ‘Pocket Laser Engraver’ от Groover.
Данное руководство это «мaking-оf», то есть описание всего процесса создания. И хотя многое, если не все, во время механической сборки требует изобретательности, я попытался на сколько это возможно задокументировать процесс целиком. Принтеры и сканеры бывают разных моделей, поэтому данная статья не может быть использована как точная пошаговая инструкция, это скорее пособие «как это можно сделать». Все вопросы которые могут возникать во время изготовления этой самоделки, я постараюсь осветить.
Скажу, что в электронике я ничего не соображал, знал лишь что красный (в основном) это «плюс», а черный (также в основном) — это «масса».
И поэтому за время воплощения этого проекта многому научился, начиная от технических вещей, таких как самовосстанавливающиеся латунные подшипники, до электронных, таких как шаговые двигатели и разницы между би- и однополярными двигателями, пайки и травления собственной платы.
Рабочая площадь этого мозгогравера составляет 27х20см, самое то, чтобы сделать какие-нибудь шлепанцы на лето.
Резать он может следующие материалы:
— поролон
— пленку
— винил
— бумагу (почти всех цветов кроме белого и красного)
— некоторые пластмассы (в зависимости от толщины может понадобиться несколько проходов)
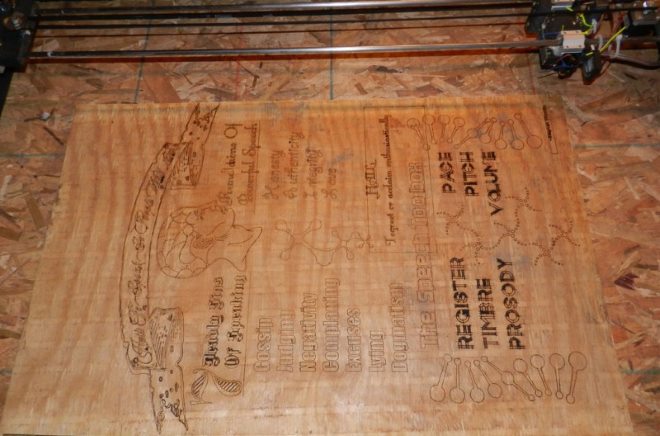
Гравировать он может на:
— светлой древесине
— коже
— кости
— рогах
— пластике
— некоторых лакированных покрытиях
— чистых CD/DVD-дисках (синих и фиолетовых)
Цвет здесь играет важную роль. С белыми поверхностями сложно, если не невозможно, работать, потому что они слишком сильно отражают красный луч. Красные поверхности также проблемны, ведь они тоже отражают все излучение красного участка спектра.
Затраты на всю сборку не большие, и все что понадобится это:
— Arduino (или клон) -1 шт.
— Easydriver — 2шт.
— некоторые электронные детали
— лазерный модуль Aixiz /W lens
— алюминиевый профиль
. И чуть не забыл — лазерные защитные очки (ОБЯЗАТЕЛЬНО).
См. Шаг 16: для ознакомления с защитой глаз от лазера.
Времени на изготовление гравера, включая заказ и ожидание доставки, ушло примерно 4 месяца. Но он постоянно дорабатывается, и вот последние изменения:
— 9 мая 2013 : обновлен шаг 14 : Лазерный диод (фотографии и несколько советов по фокусировке)
— 13 мая 2013 года : добавлен шаг 17 — ссылки и файлы
— Добавлен Шаг 18: дальнейшие планы по улучшению( по желанию)
— Обновлен BOM-список, теперь он содержит больше необходимых материалов
— 20 мая 2013 : исправлены мм/сек в мм/мин ! В секундах было бы очень очень быстро.
— 1 июня 2013 : добавлен Шаг 13 — альтернативный щилд лазерного драйвера лазера (щилд Easylaser)
— 4 декабря 2013: обновлен схема/макет с альтернативным шилдом Easylaser.
Шаг 1: Поиск кандидатов на разбор
Перед тем как приступать к «яростному» разбору следует учесть ряд советов:
Правила выведенные опытным путем
— чем древнее принтер, тем лучше
— чем новее сканер, тем лучше.
Шаговые двигатели сканеров зачастую превосходят шаговые двигатели принтеров, они делают больше шагов за оборот.
Чем новее принтер, тем меньше шансов добыть из него шаговый двигатель (степпер).
Все сканеры имеют степперы, и чем сканер древнее, тем больше вероятность достать из него однополярный шаговый двигатель, который в данном мозгопроекте не пригодится.
Идентификация деталей старых устройств процесс сложный, но мне повезло, хоть степпер сканера новый. А для принтера я отыскал инструкцию по ремонту, но и она особо не помогла мне.
Выбранный мной сканер это старый Tevion 2400, аналог Microtek Scanmaker 5800.
Степпер это 96-шаговый биполярный шаговый двигатель, по описанию NEOCENE 2T354207. Не верьте если вам говорят, что он 100-шаговый, это неправда! 96-шаговый, ни больше, ни меньше.
Стол сканера я использовал в качестве основания мозгоподелки.
Используются так же направляющая и зубчатый ремень, а еще каретка, перемещавшая фотоэлектронику. Но каретку придется подрезать, чтобы дать больше пространства для лазера.
Теперь немного о степпере.
Имеются 4 шестерни расположенные на проводковой плите.
Передаточное отношение, к счастью, незначительно. Если вам хочется узнать как оно рассчитывается, то загляните на эту страничку( язык там немецкий, но можно воспользоваться опцией онлайн-перевода).
Степпер сканер отвечает за ось Х.
Принтер / ось Y
Принтер для разбоа я взял старый Epson Stylus Photo 925.
Судя по странному руководству по ремонту принтера степпер из него 4-фазный, 48 шаговый, биполярный, 42В (. ), вот только не понимаю, если это биполярный степпер он должен иметь 2 фазы, а не 4.
Проворачивая вал вручную я подсчитал количество шагов, их оказалось 48.
Этот шаговый двигатель (и каретка печатной головки) отвечают за ось Y.
Позже я понял, что этот 48 шагов или степпер сам по себе являются слабым звеном в этой поделке. Он медленнее степпера сканера и гремит на направляющей. Латунные фиттинги здесь отсутствуют, смазка вазелином должна немного исправить ситуацию.
Технические характеристики степперов:
— Tevion 2400 dpi / Microtek 5800
фаз — 2, шаговый угол — 3,75°/шаг = 96 шагов, напряжение 5В, сила тока — ?, сопротивление 5.5Ом, удерживающий момент — ?.
— Epson Stylus Photo 925
фаз — 2, шаговый угол — 7,5°/шаг = 48 шагов, напряжение — 5-12В,
сила тока — ?, сопротивление — 7Ом, удерживающий момент — ?.
Позже я узнал, что оба степпера потребляют ток менее 300 мА.
Easydriver V4.4 имеет ошибку с шелковой печатью при смешивании Max и Min poti, в 4.4 они переходят на печать на PCB, и одновременно меняется poti на реверс poti. По крайней мере это я прочитал на некоторых форумах.
Проще говоря:
Poti настроен на низкое сопротивление, это значит степеры получают часть тока, которое может подать Easydriver. Максимум 750мА на катушку. Poti установлен примерно на 25%, просто чтобы они не «закричали от боли».
Распиновка шагового двигателя:
Во время бесконечных поисков в интернете я часто наталкивался на вопрос — как узнать правильную распиновку степперов? А нужно лишь взять кусочек провода и замкнуть контакты, и если при повороте вала чувствуется сопротивление, то вы замкнули пару.
Шаг 2: Разбор сканера
Полагаю, что ваши старые принтер и сканер не такие как у меня, и этот шаг скорее о том, что необходимо сделать, и что бережно сохранить. Принтеры и сканеры различных моделей имеют разные механизмы, но мозгостроение у них схожее.
От сканера мне необходимы стол и каретка, в которой находится фотоэлектроника.
Вся электрокомпоненты и зеркало были удалены, и сделано это было с помощью отвертки и защитных перчаток.
В итоге остается лишь голый пластиковый поддон, который затем был немного подрезан, чтобы иметь больше пространства для каретки принтера, на которую будет установлен лазерный модуль с вентилятором.
Шаг 3: Операции с принтером — часть 1
Данный шаг самый нудный из всего мозгоруководства. Я затратил на него около 8 часов, причем мне еще помогал продвинутый самодельщик (отец).
Каретка принтера, в которой располагается печатная головка, и направляющая были хорошо доработаны моей любимой пилой по металлу. А еще я отрезал кусок L-образного профиля, чтобы получить посадочное место для степпера.
Там, где в исходном принтере находился DC двигатель, сейчас располагается степпер. Зачастую (надеюсь что так) степпер от этого же принтера аккуратно входит в посадочное отверстие DC-двигателя.
Шаг 4: Операции с принтером — часть 2
Направляющая, по которой перемещается каретка печатной головки принтера, имеет несколько децентрированные шайбы на концах, которые легко скручиваются и снимаются плоскогубцами. Под ними скрываются красивые центрированные наконечники.
В двух отрезках T-профиля я высверлил отверстия под наконечники направляющей, и с помощью них смонтировал направляющую на L-профиль. Этот шаг требует точности, иначе позднее при мозгоработе ось Y может смещаться. А это, если ось Y не будет располагаться под прямым углом к оси X, приведет к искажению всего рисунка/ контура в процессе лазерной обработки. Поэтому используйте штангенциркуль, а не размечайте на глазок.
Шаг 5: Проводка — часть 1
Подключение кабелей оси Y
Степпер уже перемещает каретку оси Y, значит пора задуматься, как его подключить. Для этого я взял 5-контактный разъем от старой материнской платы и просто припаял его к контактам шагового двигателя, и через него, с помощью 4-дорожечного кабеля, подсоединил его к контактной плате, установленной на L-профиль. Эта контактная мозгоплата, по сути является шлюзом между всеми электрокомпонентами подвижной оси Y и микроконтроллером Arduino. К дорожкам ленточного кабеля, который раньше шел к каретке сканера, я припаял несколько «мама»-контактов. Да, работа «сыровата», есть куда развиваться. Я если бы я был более предусмотрителен, то припаял бы 8-контактный разъем на ленточный кабель, но это очень недолговечная конструкция, и позже вы увидите почему.
Шаг 6: «Магия» для «волшебного черного кирпича»
Чтобы управлять драйверами степперов необходимо скачать grbl и загрузить ее на ваш микроконтроллер. Я использовал GRBL 0.8с, которую можно найти https://github.com/grbl/grbl. По этой ссылке прокрутите страницу и найдите версию 0.8, это будет скомпилированный .hex файл, который можно загрузить на Arduino с помощью hex-загрузчика.
Чтобы избежать рассинхронизации необходимо изменить скорость передачи данных, с которой загрузчик сообщается с Arduino, с 19200 до 115200, см. рисунок.
Для изменения распиновки GRBL необходимо получить исходник по вышепредставленной мозгоссылке и модифицировать файл config.h, и, конечно, его перекомпилировать. В нем вы можете изменять распиновку как вам нравится, что очень пригодится если вы используете другой драйвер шагового двигателя.
Для рекомпиляции в оболочке введите:
make clean
make grbl.hex
Шаг 7: Сборка электроцепи на макетке
Перед тем как делать печатную плату хорошо бы проверить, работает ли цепь так как нужно. И поэтому электроцепь поделки я сначала собрал на макетной плате, на данном этапе только моторную группу.
На верхнем фото можно увидеть, что контакты драйвера MS1 и MS2 подсоединены к 5В, и это значит, что они «под напряжением».
Easydriver может работать с микростеппингом, который значит, что шаг мотора можно разделить на две или четыре фазы и т.д. 92 шаговый степпер может работать с 8 микрошагами, то есть 96х8=768 шагов.
MS1 и MS2 — не под напряжением — полный шаг
MS1 — под напряжением — микростеппинг в половину оборота
MS2 — под напряжением — микростеппинг в четверть оборота
MS1 и MS2 — под напряжением — микростеппинг в 1/8 оборота
Нам нужен микростеппинг 1/8, поэтому к контактам MS1 и MS2 подведены 5В
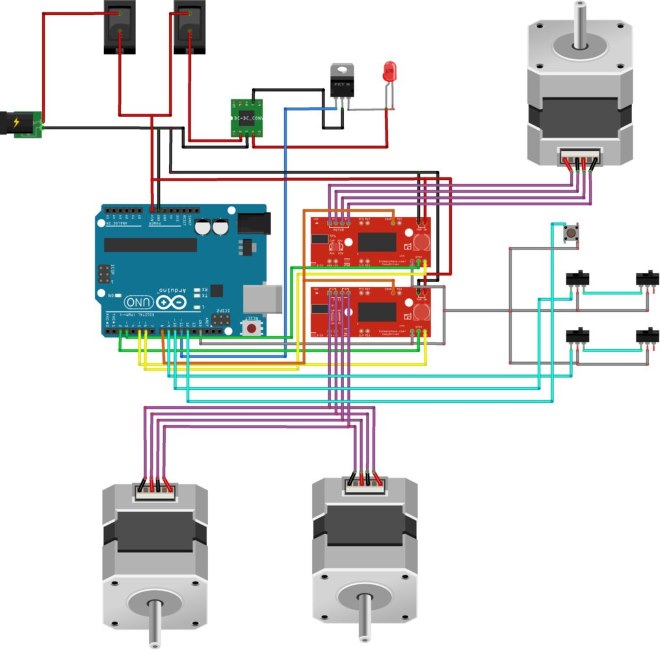
Распиновка Arduino выглядит следующим образом:
Arduino Digital 2 — Easydriver X-Step
Digital 5 — X-Dir
Digital 3 — Y-Step
Digital 6 — Y-Dir
На каждом из драйверов контакты MS1 и MS2 соединены перемычкой и на них подается 5В, так включится режим микростеппинга в 1/8 шага. Драйверы Easydriver имеют отдельный источник питания, любой розеточный 12В, 600мА блок питания сгодится. Позднее платы драйверов будут запитаны от Arduino, как и лазер, и вентилятор.
Я даже записал короткое мозговидео о том, как работает прототип. Драйверы довольно сильно греются, и чтобы они непрерывно работали необходимо вентиляторное охлаждение. Да…Вентилятор крепится на прототип…
Шаг 8: Калибровка
Перед тем как начать делать всякие модные мозгоштучки со степперами их нужно откалибровать. Шаг это важный и пропускать его ни в коем случае нельзя. Я отыскал хороший и толковый видеоурок по этой теме — BuildYourOwnCNC.
В нем говорится, что нужно расчитать шаг/мм. На это значение вы перемещаете нужный вам степпер с помощью gcode (например Х200). Затем следует учесть разницу и рассчитать новое значение шаг/мм, и так до тех пор, пока он не перемещается в том диапазоне, который вы задали. Но лучше смотрите видео для получения большей информации по этим рассчетам.
Я советую создать таблицу, чтобы избавиться от лишней головной боли.
Для «общения» с grbl можно использовать любой из видов терминала, я пользуюсь CoolTerm. Полагаю вы знаете, как загрузить терминал и подключиться к Arduino.
А на картинке вы можете посмотреть данные мой калибровки самоделки.
Шаг 9: Первый контакт
А терерь за дело, пора опробовать некоторыйе команды g-кода.
Переместите степперы в исходное положение прежде чем их включить (например, нулевую позицию) типа:
G91 G28 X0 Y0
Эта команда сообщает GRBL, что данное положение это нулевая позиция.
X50 Y50
Данная команда перемещает вал в абсолютную позицию X50 Y50
G01 Y50 Х50
А эта команда перемещает вал на 50мм по оси Х и на 50мм по оси Y, независимо от того, в какой позиции он был до этого. Это называется относительным позиционированием.
Для большей информации по командам gcode почитайте об этом здесь.
( Специально для МозгоЧинов #Frankenstein-Laser-Engraver
Источник



