
- Нужна ли площадка для квадрокоптера?
- Размер
- Материал
- Расцветка
- Крепления
- Методика развертывания и свертывания
- Выводы
- Автопосадка коптера на подвижную платформу
- Автопосадка коптера на подвижную платформу
- Домики для дронов: какие посадочные платформы БПЛА бывают, что внутри, чем отличаются, кто делает и как выбрать нужную
- Прототип системы мониторинга на базе БПЛА с наземной платформой, разработанный в Университете Иннополис
- Аэропорт в коробке
- Позиционирование
- Посадочные платформы без позиционирования БПЛА
- Платформы с активным позиционированием
- Параллельные толкатели
- Почтоматы с БПЛА (a bit offtop)
- Фигурные толкатели
- Поворотные толкатели
- Ирисовые диафрагмы как устройство позиционирования
- Посадочные платформы с пассивным позиционированием
- Конические воронки
- Посадочные поверхности в виде замкнутого контура
- Комбинированные устройства позиционирования
- Нестандартные устройства посадки БПЛА
- Что дальше
- Вместо заключения
Нужна ли площадка для квадрокоптера?
Большинство пилотов-любителей считает, что площадка для квадрокоптера (Landing Pad RC) является не самым важным атрибутом. Это глубоко ошибочное мнение. Данное устройство способно не только четко указывать на точку приземления, но и защищать беспилотник от попадания в него воды, пыли, кусочков травы и другого мусора в момент выполнения взлета и посадки. Тем самым оно продлевает жизнь летательному аппарату, спасая его от возможного перегрева и вызванных им повреждений.
Рынок переполнен подобными изделиями, что делает поиск подходящей мобильной площадки для коптера не слишком простой задачей. Очень легко запутаться в сотнях вариантов, обладающих близкими характеристиками, но отличающихся в важных мелочах. С учетом сказанного, мы хотели бы провести своих читателей через процедуру выбора подходящей посадочной площадки для квадрокоптера. Мы укажем на признаки, характерные для качественных изделий, а также продемонстрируем шаги, которые необходимо предпринять перед покупкой данного приспособления.
Размер
Размер не является главным показателем площадки (иногда ее именуют мобильным кортом), но если вы являетесь обладателем достаточно крупного летательного аппарата (например, DJI Inspire ), этот параметр играет немалую роль. Среди потребителей очень популярен корт, обладающий диаметром в 2,5 фута (75 см). Он рассчитан на работу с дронами DJI Mavic Air или с другими небольшими моделями. Впрочем, стандартная взлетная площадка для квадрокоптера обычно имеет диаметр 3-5 футов (порядка 0,9-1,5 м). Трехфутовый размер немного мал для машин DJI Phantom. Они еще способны поместиться на площадке такого диаметра, но для выполнения подобного маневра от оператора потребуются все его навыки пилотирования. Мобильные корты диаметром 4 и 5 футов отлично подходят практически для всех дронов.
Материал
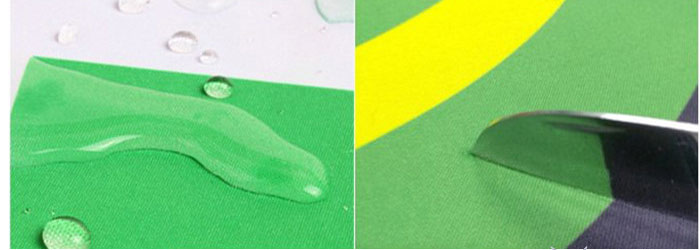
Мы понимаем, что вы не собираетесь взлетать с поверхности воды или приводняться в озеро или реку. Но стоит отметить, что почва часто бывает мокрой – влажный песок на пляже, утренняя роса на траве, а в зимний период большой проблемой является снег, покрывающий место старта. По этой причине площадка для квадрокоптера должна быть сшита из водонепроницаемых материалов. Такая модель очень легко моется, что позволяет не запачкать грязью упаковочный чехол, рюкзак или багажник автомобиля. Приспособление должно без проблем укладываться в чехол, поэтому его материал просто обязан быть мягким и обладать высокой устойчивостью к повреждениям.
Расцветка
Мобильному корту просто необходима очень заметная цветовая схема. Пользователю стоит поискать чрезвычайно яркие версии оранжевого, желтого или красного цвета. Для полетов вечером и ночью очень удобно использовать модели, разметка которых способна светиться в темноте.
Взлетка не должна выгорать на солнце. Она обязана оставаться яркой и заметной на протяжении всего срока ее эксплуатации.
Крепления

Площадка может легко сдуваться порывами ветра. Поэтому главным ключом к надежному использованию этого изделия является его четкая фиксация в точке старта. Большинство изделий имеют по 3-4 петли, пришитых по краям. Поставка просто обязана включать специальные колышки, которые вставляются в петли и втыкаются в землю.
Методика развертывания и свертывания

Упругий корд, расположенный по периметру устройства, почти автоматически разворачивает его после извлечения из чехла. Обратный процесс потребует от пилота определенных навыков. Площадку необходимо взять двумя руками за ее противоположные края и выполнить кистями одновременное вращение в противоположных направлениях (как бы попытаться скрутить устройство). Мобильный корт сложится.
Выводы
Из всего сказанного выше можно сделать вывод, что посадочные площадки чуть более универсальны, чем многие думают. Это изделие многие пилоты ошибочно считают излишним и, вероятно, не покупают. Впрочем, в российских погодных условиях такое приспособление просто необходимо при выполнении полетов за пределами городов.
Источник
Автопосадка коптера на подвижную платформу
Тема раздела Квадрокоптеры. Общие вопросы в категории Квадрокоптеры и мультироторы; Всем привет. По роду своей деятельности связан с морем, и коптеры приходится запускать на ходу либо с катера либо с .
Опции темы
Автопосадка коптера на подвижную платформу
Всем привет. По роду своей деятельности связан с морем, и коптеры приходится запускать на ходу либо с катера либо с парохода. И теперь вопрос: на чем(в смысле на каком контроллере) можно реализовать функцию автоматической посадки на катер в движении если предположим зарулился. Думал по поводу связки двух комплектов плат микрокоптера(у них есть функция follow me-полет за целью) в этом случае наземный комплект плат будет выступать в роли gps маячка. Либо у адрукоптера тоже есть похожая функция. Но все равно готового решения я не нашёл. Может кто уже решал похожую задачу-поделитесь опытом)

Если зарулился пусть включается follow me — выровняется и сами уже посадите. Думаю так реальней всего.
Задача стоит именно в автоматической посадке. То есть имеем некую автоматизацию процесса: катер плывет, коптер с него взлетает делает облёт нужного мне объекта, снимает его и в автомате возвращается на базу. Вся проблема в том, что катер(то есть база) не стоит на месте. А система должна быть максимально простой, дабы исключить ошибки пилота.
Условия уж очень не простые. Если на пароход с широкой палубой еще просто сесть, то быстрый мелкий катер.. даже незнаю
Палуба широкая 10-12 метров, средняя скорость катера примерно 10 узлов при условии отсутствия ветра, задачу считаю вполне выполнимой.
Почитайте вот эту тему, там много подобных задач обсуждали. Да и собственно главная идея там и была сесть в мишень.
Система должна быть простой в эксплуатации, но при этом она будет очень НЕ простой по устройству.
Фактически, речь идет о взрослом БПЛА-комплексе. Собрать это из модельных запчастей без огромного опыта и надеяться на надежность системы — к сожалению не выйдет. надо привлекать специалиста и платить ему деньги. Или очень основательно вникать самому, а главное — проводить долгие испытания с доводкой системы. И проблема тут далеко не только в посадке на движущееся судно.
А чем «модельные» запчасти отличаются от немодельных?
Надежность и резервирование. Конечно имелись ввиду ходовые ширпотребные запчасти.
Хотя, бюджет не был озвучен — наверное нет проблем взять дорогую и качественную комплектуху.
10 узлов на воде . посадка . в лучшем случае шмякнется жёстко . что то типа мягкой площадки надо городить, что бы подлетел, на какую то высоту и просто вырубил моторы. А по существу как сказали выше — на хоббийном уровне неосуществимо с достаточной степенью надёжности.
Проще всего наверное что то типа сетки. Но так, чтобы дизармились движки еще в полете. Тогда алгоритм собственно типа Follow me когда возвращается на корабль, и когда над сеткой находится, тупо рубить двигатели. Если скорости и направления на момент выключения совпадали, то шмякнется в сетку минимальными потерями.
Так для размышления. А обязательно коптер, может самолет?
Проблема есть: её нам никто не продает 
То есть, гироскопы с индексом «милитери»- можно только на выставке поглядеть
Не обязательно военную, просто качественную модельную. Уровня weatronic и прочее, что на реактивные самолеты не страшно ставить. И злейшее резервирование с грамотной развязкой по питанию.
Вот системы управления и телеметрии — они да, бесконечно далеки от военных в плане надежности и защищенности. Чтобы завалить связь, даже аппаратура РЭБ не нужна, достаточно китайской глушилки вафли с какого-нибудь ДХ-а ценой в 40 баксов.
А почему нельзя пользовался той же follow me и пропорционально снижать скорость вращения на всех моторах до полной посадки?
Потому, что в реальности все совсем не просто и даже не так!
Начнем с того, что от скорости вращения моторов зависит не высота полета аппарата, а вертикальная скорость аппарата. Высота — является интегральной х-кой от скорости. При посадке с небольшой высоты — можно просто снизить скорость вращения моторов и коптер сядет. но с высоты хотя-бы 5 метров — коптер уже не сядет, а шмякнется со значительной вертикальной скоростью в момент касания!
А ведь требуемые для определенной траектории полета обороты моторов зависят еще и от горизонтальной скорости аппарата и его углов наклона относительно горизонта.
Собственно говоря, в случае мультикоптеров — со стороны пилота или автопилота вообще нет прямого контроля за оборотами моторов: все моторы управляются через ПИДы, удерживающие ориентацию и положение аппарата в пр-ве, а пользователь (или блок автопилота — отдельный или внутри ПО мозга) общается непосредственно только с этой системой регулирования, которая обеспечивает полет коптера и непосредственно «рулит» аппаратом.
При этом есть целая куча полетных режимов, внешних и внутренних условий, которые влияют на реальный полет. Не любой мозг и не во всех режимах ведет себя адекватно — и это до сих пор проблема. Есть у коптера и ифзические ограничения: на определенной горизонтальной скорости, выше некого предельного значения, коптер может начать терять высоту и-или стабильность, так как моторы вышли на максимальный газ и не имеют запаса мощности для поддержания скорости, высоты и вместе с тем — пространственной ориентации.
ок, забудем о 10 узлах, допустим скорость катера 10 км\час, в среднем скорость коптера около 40 км\час то есть запаса по мощности у двигателей за глаза. Согласен коптером рулят пиды, но в при управлении ручками при необходимости посадки на подвижный объект мы держим необходимую нам скорость одним стиком на аппе и постепенно уменьшаем газ вторым стиком, почему нельзя тоже самое реализовать в автомате?
Или другой подход: Значение скорости и направления движения у катера в большинстве случаев постоянная величина. Предположим мозги коптера получают от жпс маячка установленного на катере данные о его местоположении скорости и исходя из этих данных легко вычислить его будущее местоположение. То есть коптер летит на опережение и спокойно себе садится на катер который к моменту посадки коптера как раз доплывет до необходимой точки
Источник
Домики для дронов: какие посадочные платформы БПЛА бывают, что внутри, чем отличаются, кто делает и как выбрать нужную
В Центре компетенций НТИ по направлению «Технологии компонентов робототехники и мехатроники» на базе Университета Иннополис мы разработали прототип наземной посадочной платформы для беспилотного летательного аппарата.
Основное назначение таких платформ — борьба с недостатком БПЛА коптерного типа, малым временем работы. Аппарат может выполнить зарядку или замену батарей в посадочной станции, отдохнуть, принять ванну и продолжить свою миссию. Также такие платформы могут иметь и другие функции автоматического наземного обслуживания БПЛА — получение грузов, укрытие и хранение БПЛА, обмен данными и т.п.
За время работы над прототипом накопились результаты поисковой и изобретательской работы в области конструкций платформ, которыми хотелось бы поделиться. Недавно на эту тему мы опубликовали статью в Sensors (это, как считается, неплохой журнал, но, чувствую, на Хабре просмотров будет больше). Здесь приведу её краткий пересказ о том, какие посадочные платформы БПЛА бывают и кто их делает, чем отличаются их конструкции и как выбрать нужную под свои задачи.

Прототип системы мониторинга на базе БПЛА с наземной платформой, разработанный в Университете Иннополис
Прототип наземной посадочной платформы для беспилотного летательного аппарата, разработанный в Университете Иннополис. Конструкция — Муса Галимов, электроника — Айдар Мингалеев, Максим Михайлов, дрон и автоматическая посадка — Дмитрий Девитт, видео by deluuusi0n
Особенностями нашего прототипа являются расчет на большой диапазон температур и возможность применения на подвижном объекте.
Откуда уши торчат
Первую посадочную платформу мы делали для применения в качестве модуля аэроразведки для беспилотного КАМАЗа.
Планирование проходимого маршрута движения наземного подвижного объекта на трехмерной карте карьера, полученной с БПЛА
Идея состоит в том, что беспилотный Камаз в условиях бездорожья мог построить свой маршрут движения по данным аэросъемки.
Некоторым, кстати, эта идея очень «понравилась» (по ссылке локальные мемчики). Не показывайте Сергею Асланяну это, это и подобное, а тем более это 🙂
Сейчас мы занимаемся доработкой прототипа, прежде всего для задач автоматического мониторинга по расписанию, но и задача доставки грузов также интересна. Эта статья является поводом подумать о требованиях к продукту на базе посадочной платформы с БПЛА и, возможно, получить рекомендации и пожелания. Будем рады обратной связи.
Исходная научная статья написана во многом на основе патентного поиска (так что подготовьтесь к сканированным рисункам из заявок на патенты) а также обзора коммерческих проектов. Её первый автор — Муса Галимов, наш мудрый ведущий инженер-конструктор.
Аэропорт в коробке
Я люблю коробочки, отдел ИКЕА «Хранение и порядок» в топе. При переезде в Иннополис транспортной компанией было перевезено 63 коробочки. Поэтому идея drone box, коробки для дрона, она же посадочная станция, находит отклик в моем сердце 🙂
Тест посадочной платформы Percepto как защитного укрытия дрона при штормовом ветре
Первое назначение посадочной станции — хранение дрона до того момента, пока он не понадобится. И тут начинается интересное. Как робототехники и просто занятые люди мы хотим, чтобы дрон выполнял свою миссию самостоятельно. А миссия это обычно одно из двух — либо что-то доставить, либо что-то мониторить/картографировать/обследовать и т.п.
И теперь наша коробка для хранения дрона трансформируется в элемент инфраструктуры для автоматического функционирования БПЛА. Посадочная платформа должна обеспечивать автоматический взлёт и последующую посадку БПЛА, а между посадкой и взлётом обеспечивать т.н. лётную годность БПЛА, а именно заряжать или менять батареи, возможно, выполнять манипуляции с грузом и т.п.
Для автоматической посадки на платформу как правило сначала используется GPS для возвращения дрона в окрестность посадочной станции с точностью около 5 м (с RTK можно добиться и сантиметров). Затем — камеры видимого и ИК-диапазонов для ориентации относительно специальной метки на посадочной станции, а также лазерный высотомер для уточнения относительной высоты. С помощью такой системы можно обеспечить точность посадки порядка десятка сантиметров или даже нескольких сантиметров, в зависимости от характеристик БПЛА и внешних условий.
Дальше, чтобы обеспечивать обслуживание БПЛА в автоматическом режиме, как правило, нужно ещё точнее спозиционировать БПЛА относительно посадочной платформы или элементы посадочной платформы относительно БПЛА (уже, пожалуй, с точностью около сантиметра), чтобы подключить контакты зарядки, например, или подвести манипулятор для снятия груза.
И так мы подобрались к элементу платформы — устройству позиционирования, который мы выделили как основной классификационный признак при обзоре устройств посадочных платформ БПЛА.
Позиционирование
На первый взгляд, о чем тут писать — какие-то направляющие, которые толкают дрон в нужную точку. Но, оказывается, здесь целый букет идей и можно проследить несколько направлений мысли конструкторов.
Итак, посадочные платформы можно разделить на:
платформы без устройств позиционирования,
с активными устройствами позиционирования,
с пассивными устройствами позиционирования,
с комбинацией устройств позиционирования,
и другие не подпадающие под предыдущие пункты, с нестандартными устройствами позиционирования.
Классификация посадочных платформ по типам устройств позиционирования
Сначала нужно сказать, что есть посадочные платформы без устройств позиционирования вовсе. БПЛА приземляется на площадку с точностью, обеспечиваемой системой управления БПЛА. Обслуживающие устройства БПЛА, входящие в состав посадочной площадки, должны иметь возможность обслуживать БПЛА в том положении, в котором он стоит после посадки. Как правило, это электрическое соединение через большие или чередующиеся контакты. Других манипуляций по перемещению БПЛА в этом случае не производится.
Платформы с активным позиционированием имеют в своем составе механизмы и устройства, которые перемещают БПЛА в нужное положение и поворачивают его в нужном направлении — толкатели различных типов. Механизмы выбираются в соответствии с требованиями к точности и скорости позиционирования.
Для платформ с пассивным позиционированием отсутствуют приводы для перемещения БПЛА: горизонтальное перемещение БПЛА для позиционирования во время посадки обеспечивается преобразованием его вертикального движения. Пассивные устройства позиционирования включают в себя воронки, откосы, наклонные края и т.д.
Каждое из вышеперечисленных устройств имеет свои особенности и ограничения. Комбинация устройств позиционирования помогает достичь лучших результатов, используя преимущества каждого метода.
Платформы были классифицированы как платформы с нестандартными устройствами позиционирования, в случае необычных устройств посадки или методов позиционирования, которые не перечислены выше. Однако они могут быть активными, пассивными и комбинированными.
Каждый тип устройств позиционирования можно разделить на подтипы, которые показаны на рисунке выше и немного более подробно рассмотрены далее.
Все типы платформ at a glance и частота их использования в патентах
Частота использования различных устройств позиционирования
Частота использования различных вариантов устройств позиционирования
Процент использования устройств позиционирования определенных типов, полученный при анализе патентов, следующий:
платформы без позиционирующих устройств 8%
платформы с устройством активного позиционирования 22%
платформы с пассивным позиционирующим устройством 63%
платформы с нестандартными устройствами позиционирования 7%.
Платформы с комбинациями различных устройств позиционирования в этом распределении не рассматривались. Как показано, наиболее часто используются пассивные и активные позиционирующие устройства. Среди этих типов наиболее часто используются:
позиционирующие устройства с параллельными толкателями (42%) и профильными толкателями (28%) среди активных позиционирующих устройств;
воронка для всех ножек БПЛА (39%) среди пассивных устройств позиционирования.
Посадочные платформы без позиционирования БПЛА
Наиболее простым подходом для подзарядки аккумуляторов является установка электрических контактов на посадочной площадке и на ножках БПЛА. В простейшем случае посадочная платформа может иметь две равные части с прямоугольными электрическими контактами различной полярности. Такая площадка требует посадки БПЛА с точностью равной половине ширины контактной площадки.
Также на посадочной площадке могут быть установлены чередующиеся электроды различной полярности в виде полос или прямоугольников в шахматном порядке.
Посадочная станция без позиционирования БПЛА с 4 контактами зарядки компании Стилсофт
Большее количество контактов снимает требование по точности приземления БПЛА. При этом независимо от места приземления опоры БПЛА должна быть исключена возможность приземления двух опор БПЛА разной полярности на один контакт. Электрические контакты опор БПЛА могут настраиваться под электрические контакты посадочной площадки или наоборот.
Примеры серийно выпускаемых зарядных платформ БПЛА без позиционирования. (a), беспроводная зарядная подставка WiBotic (США); (b) платформа с чередующимися электродами и специальный комплект для дооснащения БПЛА компании Skysense, Inc. (США); c) платформа с чередующимися электродами фирмы Edronic (Испания)
Интересна также идея вертикального разделения контактов.
Станция зарядки аккумуляторных батарей БПЛА как пример посадочной платформы без позиционирования с вертикальным разделением контактов. 1- электрод в виде металлической сетки; 2 — электрод в виде металлического листа; 5 — БПЛА; 6 — контроллер зарядки
Вот ещё пример посадочного устройства с размещением на столбе освещения и двумя электродами сверху и снизу, между которыми зажимается дрон.
Платформы с активным позиционированием
Параллельные толкатели
Пожалуй, самый очевидный способ. Толкатели в виде планок передвигают БПЛА в требуемую зону позиционирования. Наиболее часто используются одна или две пары параллельных друг другу и работающих синхронно толкателей, сдвигающих БПЛА за опоры (ножки) к центру посадочной площадки (где обычно расположены вожделенные контакты питания). Как вариант, сами толкатели могут содержать элементы крепления и электрические контакты.
Платформа Ewatt Aerospace. 1 — опора БЛА с электродами; 2 — посадочная площадка; 3 — толкатели с электродами
Примеры платформ для БПЛА с 4 параллельными толкателями (a) COEX; и (b), Университета Иннополис
Ещё и ещё примеры для полноты обзора — тут и посадочные площадки и станции (а кто-то называет их посадочные ангары).
Почтоматы с БПЛА (a bit offtop)
Поскольку системы позиционирования с параллельными толкателями являются наиболее простыми и популярными, на основе этого подхода предлагаются первые коммерческие платформы автоматической доставки, хранения и выдачи грузов. Здесь можно остановиться подробнее.
Примеры посадочных платформ-постаматов: (a) COEX, (b) Matternet
Все хотят доставку дронами. Куча тестовых демо сделано, но в продакшн пока не пошло. На мой взгляд, здесь сложности как технические так и концептуальные. Куда должен приземлиться дрон при доставке, например, в многоквартирный дом? Во двор? А если там лужи? А безопасность людей, а как защитить сам дрон от кражи? К тому же нужно синхронизировать время прилета дрона и выхода к нему получателя, что не всегда удобно.
Другое дело, если во дворе стоит постомат, в который дрон доставляет посылку, а получатель её забирает, когда ему удобно. Здесь дрон делает свое дело и не зависит от пользователя. А пользователь получает, что хотел, и не зависит, так сказать, от реализации — получается интерфейс между рулём и сиденьем получателем или отправителем и БПЛА. Такой сервис уже представляется юзабельным и COEX молодцы, что это делают (хотя, на мой взгляд, заявленные сроки и стоимость слишком оптимистичны).
Вот ещё пара свежих примеров
Проект китайской компании Antwork. Заявлены цена доставки 2 юаня/км (21,5 руб.), максимальный вес 5 кг и дальность до 15 км:
Сначала все делают демо на медицинском применении (похоже, есть востребованность) — перевозка анализов, например.
Еще один стартап VALQARI из Чикаго с постаматом-посадочной станцией:
Фигурные толкатели
Хитрый способ снизить число толкателей и при этом по-прежнему выполнять позиционирование в двух направлениях в горизонтальной плоскости. Это стало возможно с применением толкателей фигурной формы, например, с W- и V-образными кромками. При синхронном движении толкателей друг навстречу другу опоры БПЛА помимо перемещения вместе с толкателями скользят по их кромкам. Это обеспечивает правильное позиционирование как в направлении движения толкателей, так и ортогонально их движению.
Слева: посадочная платформа с W-образными толкателями для позиционирования: 6 — БПЛА; 401 — толкатели W-образными кромками. Справа: Посадочная платформа с V-образными толкателями для позиционирования: 810 — ножка БПЛА; 220 — толкатели с V-образными кромками
Примеры платформ для БПЛА с V- и W-образными толкателями. (a), станция Airobotics с параллельными W-образными толкателями (1); (b), станция Coretronic Intelligent Robotics (CIRC) с V-образными толкателями (2), интегрированными с крышками (1)
Видео-демонстрация работы станции CIRC с V-образными толкателями:
Видео-демонстрация работы станции Airobotics с W-образными толкателями. Airobotics делает пожалуй самую крупную (размером с ларек) станцию для коптеров, в которой стоит манипулятор для смены аккумуляторов:
Поворотные толкатели
Следующая разновидность толкателей — поворотные. Они могут располагаться по углам посадочной площадки либо в центре.
Посадочная платформа Easy Aerial с поворотными толкателями
Очень оригинально выполняется позиционирование БПЛА в посадочной платформе Easy Aerial c одним поворотным толкателем. Опоры БПЛА расположены на лучах, которые установлены на корпусе эксцентрично (в этом вся фишка). В центре посадочной площадки установлен привод вращения с вертикальным валом, на который насажен вращающийся толкатель с 4 спицами (по числу опор БПЛА). После приземления БПЛА вертикальный вал начинает вращаться, спицы увлекают опоры БПЛА во вращательное движение. Взаимодействие опор БПЛА с посадочной поверхностью и спицами и наличие эксцентриситета установки лучей БПЛА приводит к тому, что центр БПЛА начинает двигаться к центру вертикального вала. Вращение прекращается в тот момент, когда опоры БПЛА встанут на установленные на посадочной поверхности электрические контакты.
Проще посмотреть на видео
Решение Easy Aerial. Один поворотный толкатель для выравнивая по двум координатам и углу — просто и круто!
Ирисовые диафрагмы как устройство позиционирования
Ирисовые диафрагмы широко применяются в объективах фотоаппаратов. Наш конструктор Муса Галимов предложил использовать их для позиционирования опор (ножек) БПЛА. Как тебе такое…
Ирисовые диафрагмы как устройство позиционирования в посадочной платформе БПЛА
Посадочные платформы с пассивным позиционированием
Конические воронки
Широко распространены посадочные площадки с конической воронкой под каждую опору БПЛА, под все опоры либо под корпус аппарата целиком.
Примеры посадочных платформ с воронками для всех опор от Skydio и всего БПЛА от Sunflower
Skydio предлагает свое решение для Enterprise применений вместе с новым дроном Skydio X2, Sunflower Labs — для охраны дома.
Охранная система на базе дрона с посадочной станцией Sunflower Labs
Такая система позволяет центрировать БПЛА в случае пассивной посадки («бросания») на последнем этапе, когда пропеллеры выключаются и аппарат центрируется под воздействием силы тяжести. Однако, такие удары не рекомендуются для БПЛА с сенсорным оборудованием, и такая система не обеспечивает выравнивание ориентации аппарата по курсу, а также усложняет системы раскрепления и подключения зарядных устройств. В случае посадки в «активном режиме» с работающими пропеллерами система «штырь-конус» создает момент, отклоняющий БПЛА и вектор тяги так, что он смещается в направлении от центра посадочной платформы.
Можно отметить, что перевернутый конус напротив обеспечивает стабилизацию БПЛА:
Система посадки ООО «СЪЕМКА С ВОЗДУХА» с перевернутым контуром и фиксацией сверху
Воронки под каждую ножку БПЛА
Другой вариант использования воронок — делать их под каждую ножку БПЛА. Установленные соосно посадочных опор БПЛА конусные отверстия широко используются для центрирования БПЛА при посадке. При посадке БПЛА будет успешно отцентрирован в том случае, если каждая опора попадёт в воронку. Глубина воронок напрямую зависит от радиуса конуса воронки на верхней плоскости посадочной платформы и угла наклона линии стока.
Пример посадочной платформы Scoutbase компании American Robotics, Inc. с конической воронкой 1 и выступающим конусом в центре 2 для БПЛА с обручем на опорах 3
Посадочные поверхности в виде замкнутого контура
Вот картинка из патента ETHZ и Disney Enterprises Inc. (да-да, сам удивился):
Посадочная платформа ETHZ и Disney Enterprises Inc. с замкнутым контуром для позиционирования: 222, 224 и 226 — приемные поверхности (наклонные); 228 — вершины приемных поверхностей; 410 — БПЛА; 414 — лучи БПЛА; 474 — горизонтальные опоры БПЛА
 by Константин Бурдинов Слева: Посадочная платформа с закрытым контуром компании Kespry Inc. 101 — БПЛА; 102 — посадочная площадка; 103 — дорожка; 104 — база; 105 — стойки; 107 — пропеллер БПЛА; 108 — лучи БПЛА; 109 — горизонтальные опоры для посадки. Справа: Посадочная платформа с замкнутым контуром для позиционирования [93] компании American Robotics Inc. 100 – Док-станция; 103 – система центрирования; 105 – выступы. Источник
by Константин Бурдинов Слева: Посадочная платформа с закрытым контуром компании Kespry Inc. 101 — БПЛА; 102 — посадочная площадка; 103 — дорожка; 104 — база; 105 — стойки; 107 — пропеллер БПЛА; 108 — лучи БПЛА; 109 — горизонтальные опоры для посадки. Справа: Посадочная платформа с замкнутым контуром для позиционирования [93] компании American Robotics Inc. 100 – Док-станция; 103 – система центрирования; 105 – выступы. Источник
Посадочная платформа для БПЛА вертикального взлёта и посадки (патент Университета Иннополис), представленная на рисунке ниже, имеет посадочную площадку 3, выполненную в виде замкнутого контура. БПЛА приземляется на лучи 12. Однако данная конструкция имеет активное устройство позиционирования и захвата БПЛА после приземления, а сама посадочная площадка 3 выполнена горизонтальной. Толкатели 6 захватного устройства движутся независимо друг от друга по замкнутой поверхности и по команде системы управления захватывают лучи 12 приземлившегося БПЛА 11, а затем производят его позиционирование. Посадочная площадка имеет устройство активного контроля местоположения и разворота приземляющегося БПЛА, которая позволяет установить захватное устройство в зону ожидаемого расположения лучей 12 БПЛА на площадке 3 и произвести быстрый захват после приземления. Быстродействие конструкции не зависит от неточности приземления БПЛА и поэтому при сложных условиях посадки должна превосходить другие устройства.
Посадочная платформа с активным устройством позиционирования и захвата БПЛА после приземления Университета Иннополис Анимация by Albert Demian
Комбинированные устройства позиционирования
Сочетание различных устройств позиционирования на посадочной площадке позволяет упростить конструкцию, повысить точность и скорость позиционирования, используя преимущества каждого устройства. Кроме того, эти устройства могут работать как параллельно, так и последовательно.
На посадочной платформе, показанной ниже, основным устройством позиционирования является диафрагма. Для расширения допустимого отклонения при посадке имеются воронки над диафрагмами. Таким образом, на посадочной площадке последовательно установлены пассивные и активные устройства позиционирования.
Комбинирование конуса и диафрагмы
Ниже показана анимация позиционирования с помощью «бегущей волны», где используются идеи воронки и активного позиционирования: вложенные воронки поднимаются последовательно, перемещая БПЛА.
Анимация «бегущей волны» by Albert Demian
Посадочная платформа DroneCore компании Asylon, показанная на рисунке ниже, является промышленным примером комбинированного устройства позиционирования с двумерной воронкой (1) с регулируемым углом наклона и дополнительным толкателем (2) для перемещения БПЛА к устройству замены батареи (3).
Платформа DroneCore фирмы Asylon, гибрид пассивного и активного позиционирования
Нестандартные устройства посадки БПЛА
Посадочной платформой для БПЛА могут служить различные, порой невероятные на первый взгляд устройства. Например, в устройстве на рисунке ниже в качестве платформы для приземления выбран провод линии электропередачи.
Зарядка от линии электропередач. 100 БПЛА; 202 – магнитный сердечник; 212 – обмотка; 204 – подвижная часть сердечника; 216 – поверхность сопряжения частей сердечника
БПЛА 100 зацепляется за провод линии электропередачи с помощью магнитного сердечника 202 с обмоткой 212. Для этого сердечник 202 выполнен раскрывающимся с подвижной частью 204. После захвата провода линии электропередачи крюк замыкается в кольцо. Получившийся замкнутый сердечник имеет первичную катушку трансформатора в виде провода линии электропередачи, и вторичную обмотку 212 которая питает зарядное устройство аккумулятора.
Аналогичную задачу решает другое устройство, которое захватывает провод линии электропередачи сверху.
Система посадки и зарядки дрона на линии электропередач
И здесь нельзя не вспомнить про «Канатоход». Круто, что его сделали в России. Это дрон, который перемещается по проводам за счет колесиков, и летает как коптер, когда нужно переместиться между столбами. Применяется для инспекции ЛЭП на предмет дефектов.
 Дрон «Канатоход» для инспекции ЛЭП Видео
Дрон «Канатоход» для инспекции ЛЭП Видео
Что дальше
В завершение: посадочных платформ для БПЛА много, они используются и будут использоваться ещё больше. Хочется попытаться выделить, что нового можно ждать в будущем.
Про постаматы я уже написал выше, хорошая история. Ещё из интересного: комнатные посадочные станции по типу зарядной станции робота-пылесоса: не посадочная платформа, а док-станция. Недавно такую представил «Амазон». Только ли игрушка это или прототип, чтоб о нем написали Engadget (как сказал Тема), покажет практика, но идея комнатных дронов со станциями зарядки подобно пылесосам мне нравится.
В предыдущей статье я упоминал VTOL-самолет как способ увеличения времени функционирования БПЛА, посадочные платформы нацелены туда же. А что если совместить, сделать посадочную платформу для самолета вертикального взлёта и посадки? Оказывается, уже есть образцы:
И ещё. А если такое да ещё и с постаматом? 🙂
Что ещё важно: необслуживаемые (самообслуживаемые) станции, функционирующие автономно (скажем, полгода или больше). А ещё можно упомянуть посадочные платформы (аэропорты) для беспилотных летающих такси. Uber предлагает концепции, например, называется Air Skyports. Volocopter тоже на эту тему думает.
Uber Air Skyport
А вот универсальная роботизированная платформа ТГУ им Г. Р. Державина. То же самое что выше, только в большем масштабе.
Универсальная роботизированная платформа ТГУ им Г. Р. Державина
Вместо заключения
Как писал вначале, мы занимаемся доработкой нашего прототипа, и надеюсь, эта статья станет поводом подумать о требованиях к новому продукту на базе посадочной платформы с БПЛА и, возможно, получить рекомендации/пожелания/заказы. Будем рады обратной связи.
Источник



