
- 3D-SPrinter
- Меню навигации
- Пользовательские ссылки
- Информация о пользователе
- Самодельный подводный буксировщик 22 Lbs
- Сообщений 1 страница 5 из 5
- Поделиться12020-01-23 20:52:24
- Поделиться22020-01-30 04:46:42
- Поделиться32020-01-30 13:12:01
- Поделиться42020-01-30 14:18:16
- Поделиться52020-02-01 04:48:07
- Подводный буксировщик
3D-SPrinter
Меню навигации
Пользовательские ссылки
Информация о пользователе
Вы здесь » 3D-SPrinter » Водный электротранспорт » Самодельный подводный буксировщик 22 Lbs
Самодельный подводный буксировщик 22 Lbs
Сообщений 1 страница 5 из 5
Поделиться12020-01-23 20:52:24
- Автор: 3D-SPrinter
- Администратор

- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09

Внимание! Это резервный форум. Основной форум здесь https://3deshnik.ru/forum/viewforum.php?f=35 .
Испытания первой версии подводного буксировщика проходили прошлым летом в Крыму. Подробности здесь https://3deshnik.ru/forum/viewtopic.php?f=19&t=926 .

Техническое видео без монтажа:
Буксировщик показал себя очень хорошо, но по результатам испытаний и «пожеланиям трудящихся» было решено внести некоторые изменения:
1. Вместо одной ручки установлены две стандартные. Потому что одна ручка не понравилась женщинам и детям.
2. Диаметр гребного винта увеличен до 150 мм и ещё немного оптимизирован (уменьшен шаг). Батарея уменьшена до 6S4P. Так получается дешевле, выше КПД и проще с выбором зарядника (подходит самый распространённый imaX B6). И при том же токе 20А тяга даже увеличилась до 11 кг (на полностью заряженном аккумуляторе).
3. На корпусе предусмотрены два штатных кронштейна под видеокамеру, свет и прочее навесное оборудование (база GoPro).
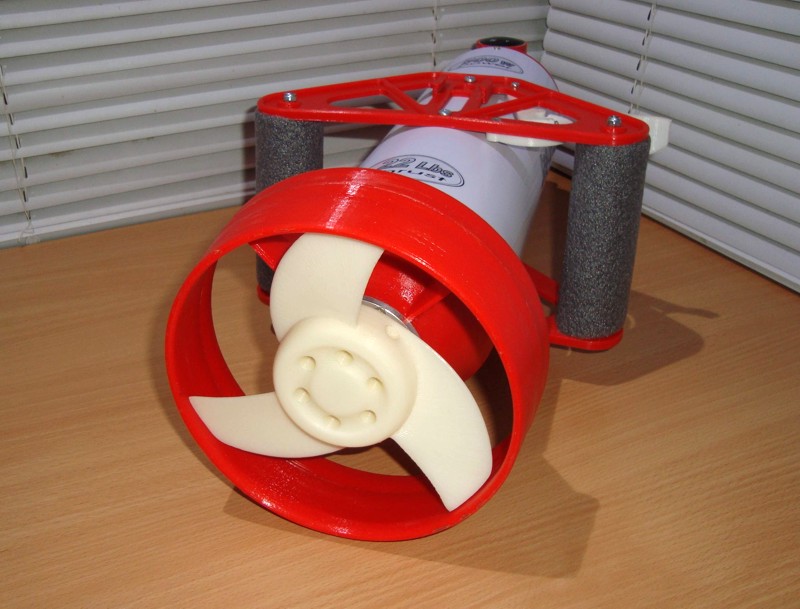
Вторая версия буксировщика:




Ещё фотки под спойлером:




Основные технические характеристики:
— Долговременная тяга 10 кг (22 Lbs), реальная скорость до 5-6 км/ч (взрослого человека среднего телосложения).
— Глубина погружения (испытанная) до 5-6 метров. Для обычного человека (не дайвера) это предостаточно.
— Аккумуляторная батарея 6S4P на 24-х элементах 3300mah INR18650 общей ёмкостью 300 Вт/ч (в реальных условиях позволяет плавать до полутора часов).
— Бесколлекторный мотор Racerstar 5065 BR5065 140KV с прямой передачей на гребной винт.
— Габаритные размеры 485х235х170 мм (убирается в стандартный чемодан для путешествий).
— Вес 3 кг (без навесного оборудования).
— Избыточная плавучесть 0.5 литра (изменяется длиной цилиндрической части корпуса).
— Примерная стоимость постройки = 12500 руб. вместе со стоимостью КИТа для сборки (из них стоимость комплектухи с алишки около = 8000 руб.).
Т.е. заметьте — собрать такой аппарат из КИТа дешевле, чем купить такое «ведро» ( без аккумулятора. ) на алишке https://aliexpress.ru/item/33027624821. … 8&mp=1 , которое вообще не тянет (килограмм 5-6 от силы), протекает и через пару сезонов превращается вот в это http://images.vfl.ru/ii/1534626154/b24b … 945469.jpg .
Цена близкого по ТТХ буксировщика MagicJet https://aquarobotman.com/pages/magicjet с вдвое меньшим аккумулятором = $699 на Амазоне https://www.amazon.com/gp/product/B07T6HT2GG?th=1 .
Поделиться22020-01-30 04:46:42
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
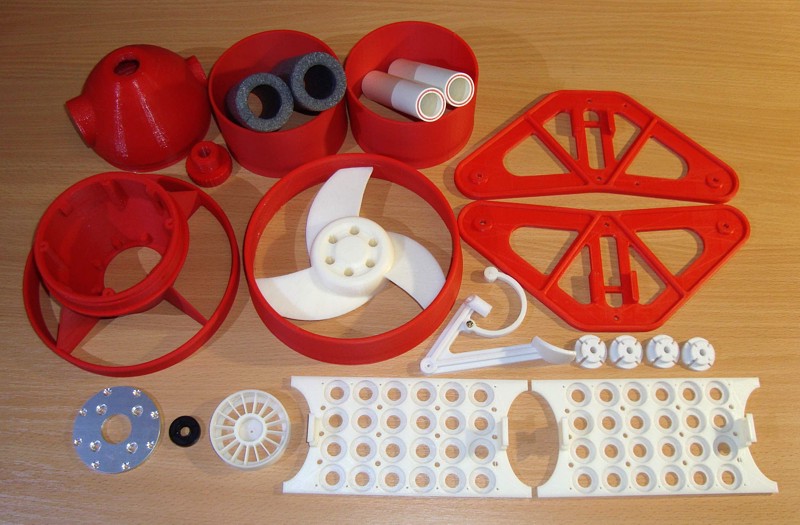
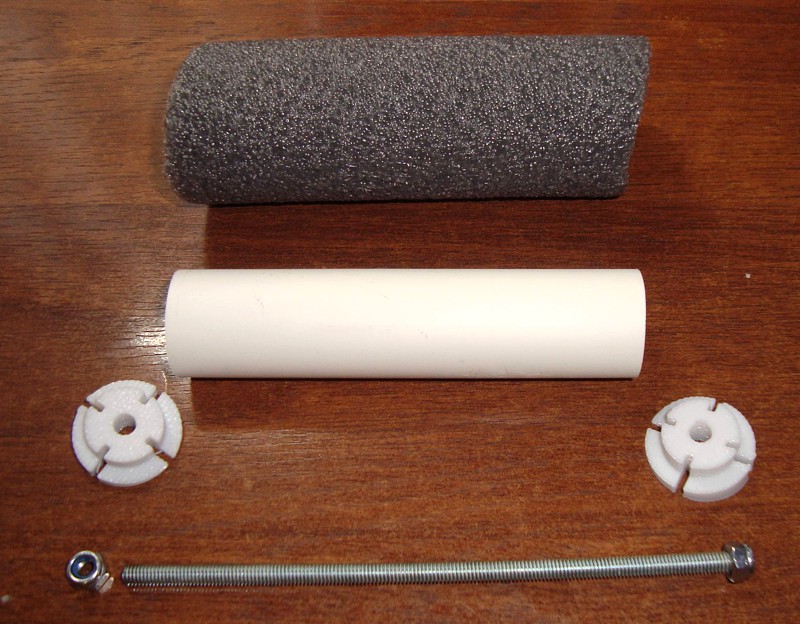
Список комплектующих для сборки буксировщика:
Основные детали буксировщика напечатаны пластиком PLA на 3д-принтере. Цилиндрическая вставка корпуса изготовлена из кан-трубы диаметром 110 мм. с толщиной стенки 3 мм. Длина 320 мм. Снаружи труба оклеена белой плёнкой-самоклейкой. Гребной винт напечатан из натурального (без красителей) пластика ABS, доработан «напильником» и доведён до блеска ацетоном. Ручки изготовлены из пластиковой водопроводной трубы диаметром 25 мм.
КИТ для сборки буксировщика:
Гребной винт дорабатывается наждачной бумагой и протирается сильно смоченной в ацетоне тряпочкой.

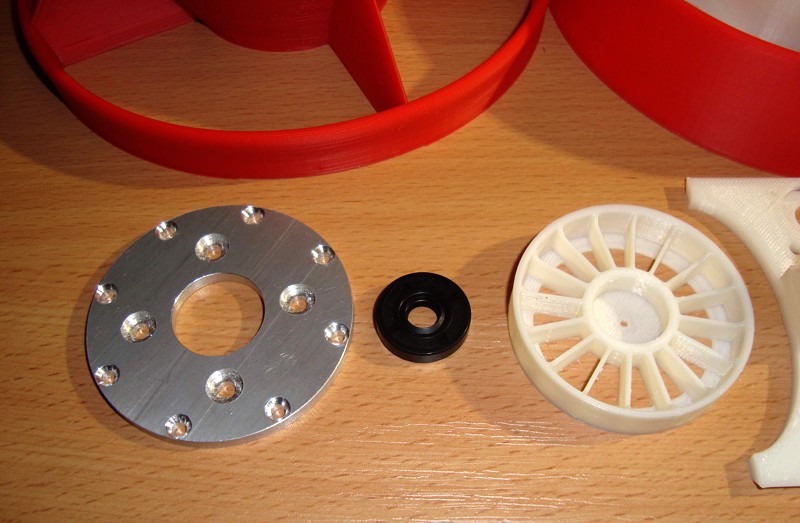
Так же в состав КИТа входит фрезерованный фланец мотора из алюминия толщиной 4 мм и «морской» сальник гребного вала с внешней манжетой. Алюминиевый фланец необходим для эффективного охлаждения мотора. При установке мотора на пластиковый корпус http://images.vfl.ru/ii/1563972812/93c6 … 318111.jpg долговременная сила тока 8-10А, с алюминиевым фланцем 20А.
Задняя часть насадки гребного винта приклеивается к моторной части дихлорэтаном https://www.chipdip.ru/product/09-3967-rexant . В дихлорэтане желательно развести некоторое количество PLA-пластика до получения «густоты» клея на уровне «моторного масла». Затем все детали из PLA-пластика тщательно покрываются жидким акриловым лаком в 3-4 слоя (снаружи и изнутри). Такое покрытие полностью герметизирует печатные детали. Без покрытия лаком внутрь деталей и даже внутрь корпуса буксировщика может просачиваться вода. Наиболее подходящий лак — для влагозащиты печатных плат и электроники PLASTIK-71 https://www.chipdip.ru/product/plastik-71-100 .

Поделиться32020-01-30 13:12:01
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
Для надёжной герметизации деталей буксировщика лучше всего подходит казанский герметик-прокладка марки BSI.

Фланец мотора устанавливается на герметик, саморезы и винты тоже завинчиваются на герметик. Лишний герметик стирается тряпкой сразу после после сборки.


Сальник гребного вала набивается консистентной влагостойкой смазкой.
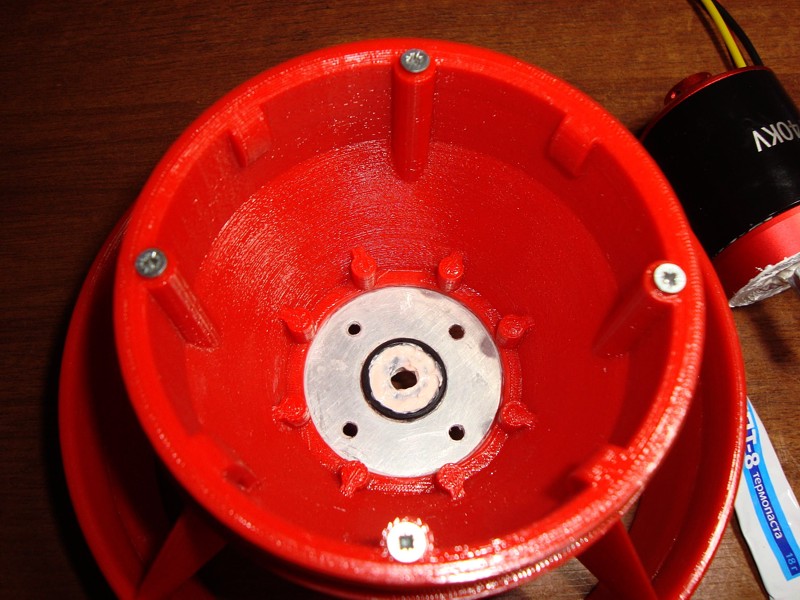
Передняя крышка мотора смазывается теплопроводной пастой КПТ-8, а подшипник — консистентной смазкой.

Далее мотор привинчивается к алюминиевому фланцу нержавеющими винтами М4 с герметиком. Лишний герметик стирается тряпкой.

После высыхания герметика всё это желательно покрыть несколькими слоями лака PLASTIK-71.
Дальше собирается передняя крышка буксировщика. Вольтметр и герметичный разъём зарядки устанавливаются на герметик и прижимаются изнутри штатными гайками. Контрольная пробка служит для оперативной проверки, не попала ли вода внутрь корпуса, и для включения-выключения тумблеров питания. Все три тумблера соединены параллельно, потому что их 15 Ампер китайские (один тумлер сгорит, два будут греться, три — потянут). Через тумблеры батарея подключается к контроллеру мотора и вольтметру. Разъём зарядки подключён напрямую к аккумулятору.


Поделиться42020-01-30 14:18:16
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
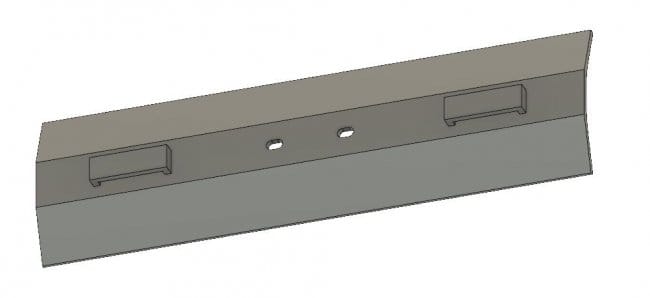
Дальше собираются ручки буксировщика. К верхней панели ручек привинчивается рычаг «газа» с магнитами и возвратная пружина. Винты М3 завинчиваются в рычаг и пружину без нарезки резьбы с натягом. Пружина притягивается к красной панели «намертво», а соединение с рычагом делается шарнирным. В рычаге установлено два магнита последовательно для усиления поля, действующего на датчик Холла, установленный внутри корпуса буксировщика. Перед вклейкой магнитов в рычаг нужно не перепутать их полюса, потому что датчик Холла одним полюсом открывается, а вторым нет. Рычаг и пружина печатаются из пластика PETG.

Для улучшения эргономики ручки наклонены на угол 12 градусов относительно продольной плоскости (ватерлинии) буксировщика и «одеты» в мягкую оболочку (термоизоляция для труб). Верхняя и нижняя панели ручек стянуты обрезками шпилек М5. Шпильки и гайки из «чёрного» металла желательно покрыть лаком PLASTIK-71.

Верхняя панель ручек привинчивается винтами М4х10 к цилиндрической вставке корпуса по центру, нижняя панель — со смещением на 22 мм назад. Отверстия под винты сверлятся диаметром 3.5 мм, винты завинчиваются без нарезки резьбы внатяг. Изнутри корпуса винты смазываются герметиком и притягиваются гайками М4.

Поделиться52020-02-01 04:48:07
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
Аккумуляторная батарея 6S4P собирается в напечатанном из пластика ABS картридже:

Верхняя и нижняя панели картриджа фиксируются стяжками. Перед установкой аккумуляторов в картриж места пайки зачищаются наждачной бумагой, обрабатываются флюсом ЛТИ-120 и быстро лудятся мощным паяльником припоем ПОС-61. Банки спаиваются многожильным медным проводом сечением 1.5-2 квадрата.
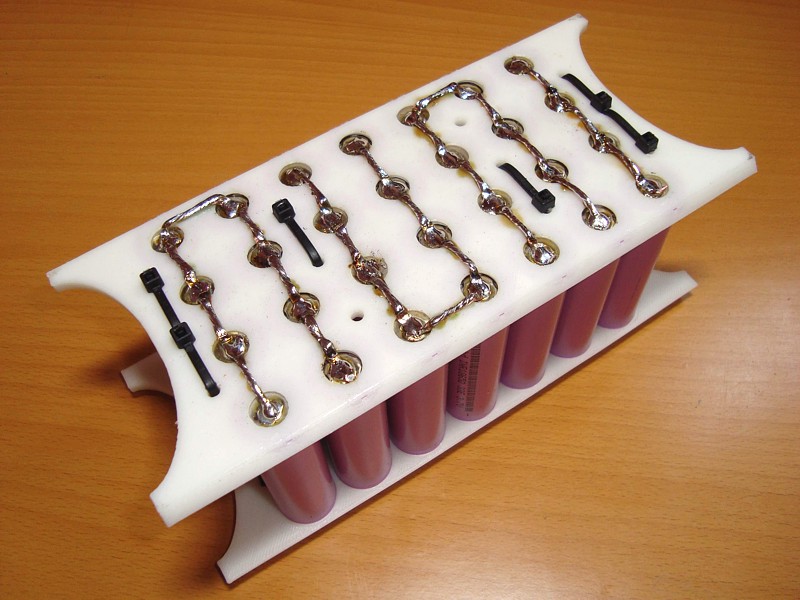
Далее припаиваются силовые провода батареи 14AWG с разъёмами, балансирный разъём с проводами, аккумуляторная батарея оклеивается армированным скотчем. В задней части батареи крепится контроллер мотора (ESC).
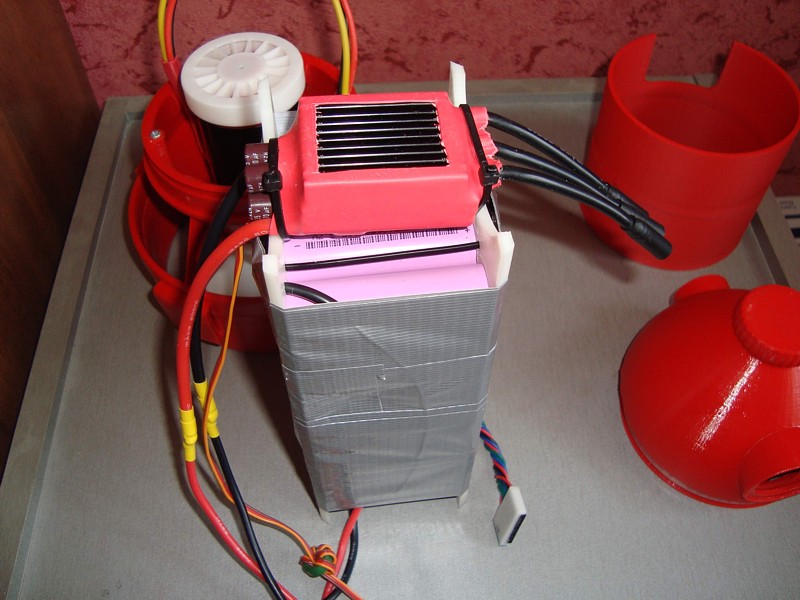
PPM-сигнал для управления контроллером мотора формируется платой Arduino NANO с датчиком Холла. Датчик холла управяляется магнитом, находящимся на рычаге «газа» на правой ручке буксировщика. Ардуину и контроллер мотора очень желательно тщательно покрыть лаком PLASTIK-71. Питание +5В поступает на Ардуину с BEC контроллера. Через этот же разъём с ноги D2 Ардуины подаётся PPM-сигнал. Датчик Холла подключается к +5В / GND Ардуины, управляющая нога датчика подключена к А0 Ардуины.
Источник
Подводный буксировщик

Еще одна интересная тема, учитывая летний сезон, -подводный буксировщик. Если грубо, то подводный буксировщик это, тяговое устройство для перемещения под водой человека. Такие буксировщику стали популярны в последнее время. По утверждению автора, его сборка обходится дешевле покупных аналогов. Постараюсь поточнее передать смысл его статьи, включая все ссылки.
Идея состоит в том, чтобы сделать подводное подруливающее устройство в виде реактивного ранца (прикрепленного к рукам и ногам), мощным и надежным, но с наименьшими затратами!
Для блока управления и пульта дистанционного управления
1.В качестве водонепроницаемой коробки мастер выбрал один из продуктов для рыбалки .
2.Два ESC. Понадобится как минимум ESC на 30A .
3.Два водонепроницаемых разъема для подключения двигателей к блоку управления.
4.Некоторые аккумуляторы 3S Lipo (у автора две 5000mAh 20C от HobbyKing, они отлично вписываются в водонепроницаемую коробку).
5.Два гнездовых разъема XT60 для подключения проводов ESC к аккумулятору Lipo (если ваши аккумуляторы имеют разъемы XT60)
6.В качестве пульта дистанционного управления автор использовал беспроводной водонепроницаемый пульт дистанционного управления , предназначенный для электрического скейтборда.
Вот и все, бюджет около 150 $.
Шаг 1: Постройте двигатели
Добавьте немного эпоксидной смолы в разобранные бесщеточные двигатели, чтобы защитить провода от воды.
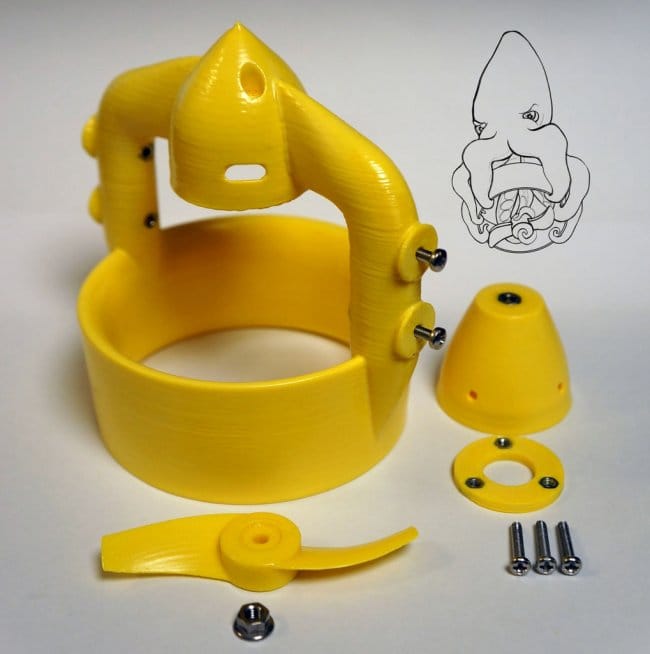
Следуйте инструкциям, данным rovthruster, чтобы собрать сопло, двигатель и пропеллер.
Припаяйте к трем проводам двигателя 1 м кабеля 16AWG и защитите припой с помощью термоусадочных трубок.
Покройте провода изоляционной оплеткой из ПЭТ.
Припаяйте провода к водонепроницаемым разъемам.
Прикрутите подруливающее устройство к кронштейну.
Повторите операцию для второго двигателя.





Шаг 2: Подготовьте водонепроницаемый блок управления
Схему мастер не приводит, но я думаю, при желании разобраться будет не сложно.
Просверлите два отверстия диаметром 21 мм в средней части коробки
Установите два водонепроницаемых штекерных разъема и убедитесь, что резиновые уплотнители правильно установлены.
Припаяйте провода от разъемов к ESC.
Припаяйте разъемы XT60 к ESC.
Подключите приемник пульта к ESC.







Источник



