
Подводная камера для рыбалки своими руками быстро и недорого
 Половить рыбку хорошо, а посмотреть её под водой ещё лучше и интереснее. Среду её обитания, места скопления для лучшей ловли.
Половить рыбку хорошо, а посмотреть её под водой ещё лучше и интереснее. Среду её обитания, места скопления для лучшей ловли.
Для этого можно купить подводную камеру, а можно сделать это не хитрое приспособление своими руками из небольшого монитора и камеры заднего вида для автомобиля, купленных недорого, например, на алиэкспресс.
Изготовление подводной камеры займет немного времени.
Для этого нам потребуется:
- Монитор 4,3 — 5″.(900 руб.)
- Камера с ИК подсветкой.(400 руб.)
- Блок АКБ или три элемента по 3,7В. (б/у)
- Зарядное устройство 12В 2-3А. (б/у)
- Цифровой вольтметр (индикатор).(100 руб.)
- Провод видео с питанием 6м. (150 руб.)
- Паяльник.
- Изолента.
- Силиконовый герметик.
- Водостойкий клей.

Описание изготовления подводной камеры
Нам нужно будет немного переделать камеру, убрать парковочные линии (если они в ней есть — это для задних камер), загерметизировать камеру и соединения с ней.
Я купил вот такую парковочную камеру заднего вида (фото ниже), она хорошо разбирается, имеет восемь инфракрасных светодиодов. Для подсветки лучше использовать именно IR светодиоды, обычные распугивают рыбу. Можно купить переднюю камеру без парковочных линий, влагостойкую. Тогда ненужно будет её разбирать.

Провода:
синий (зеленый) — минус питания светодиодов подсветки
белый — плюс питания светодиодов подсветки
красный — плюс питания камеры
черный — минус питания камеры
желтый — выход видео
Отключаем парковочные линии
Для отключения парковочных линий нам нужно поставить перемычку на корпус.

За одно и перевернём изображение по горизонтали.
На плате камеры написано:
P/N — это формат изображения NTSС или PAL. Важно для некоторых устройств. Мы оставляем без изменений.
MIR — Mirror — это зеркальность. Нужно поменять.
OSD — парковочные линии. Нужно убрать.
Flip — переворот изображения (вверх ногами). Оставляем без изменений.
На плате есть контактные площадки (пятачки напротив надписей) — их нужно соединить с корпусом (MIR и OSD с минусом черным проводом) перемычкой (на фото желтый провод, соединяющий три контакта).

Далее заполняем со шприца силиконовый герметик и накрываем крышку, побольше, чтобы излишки силикона вышли через отверстия.
Спереди светодиоды и стекло по кругу аккуратно залил клеем типа «секунда-гель». Окошко под глазок камеры оставляем чистым!
Разъёмы обрезаем, соединяем (спаиваем), изолируем несколько слоёв изоленты. Затем хорошо герметизируем.

Я сначала, после первого слоя изоленты промазал водостойким клеем типа «Момент», дал немного подсохнуть и опять промотал ещё один слой изоленты.

Далее нужно позаботиться о питании. Для этого я разобрал ненужный блок АКБ с ноутбука. Отобрал три лучших элемента.

Соединяем их последовательно. Получается 4В х 3шт = 12В.
Далее собрал простую схему переключения на переключателе с тремя положениями «заряд/контроль — отключено — включение камеры».

Для удобства контроля за АКБ купил цифровой индикатор, можно использовать вольтметр, можно вообще ничего не использовать, но так не понятно, какой заряд у батареи.
Положение влево (по схеме) подключаем АКБ к разъёму для ЗУ и цифровой вольтметр, посередине — всё отключено, вправо — подключается АКБ к нагрузке (монитор и камера).
Если включить переключатель влево без зарядки, то индикатор покажет напряжение на АКБ, как на фото ниже:

Всё соединяем и включаем:

Зарядное устройство на 12В 3А. У меня было несколько, выбрал, которое больше напряжение выдает — 13,5В.
Можно взять готовый блок АКБ 12В с зарядным от шуруповёрта.

Затем вокруг камеры был надет металлический хомут для утяжеления и крепления лески.
Так как у меня были б/у аккумуляторы, ЗУ и провод шел в комплекте с камерой, на всё это устройство было потрачено около 1500 руб. Монитор я купил на 5″, т.к. ранее я покупал на 4,3″ он дешевле, но он и проработал около месяца (может брак попался).
Автор: Зотов А. (п.Елань, Волгоградская обл.)
Источник
САМОДЕЛЬНЫЙ ПОДВОДНЫЙ МЕТАЛЛОИСКАТЕЛЬ
Известно, что в морях и озёрах — особенно в прибрежной зоне, где много отдыхающих, можно найти немало золотых и серебряных украшений. Но для поиска воде, катушка металлоискателя должна быть герметичной, а схема иметь свои особенности — так сказать подводную специализацию. Для этих целей и предназначен самодельный подводный металлоискатель Underwater P.I, сборка и настройка которого не представляет особых трудностей. Параметры при испытаниях получились следующие: 5 копеек СССР где-то 23-25 см, крупные предметы — около метра, может и чуть больше (зависит также от положения регулятора DELAY). Проверял прибор дома.


На данный момент почти доделал конструктив к Surfmaster P.I.(остался подлокотник). Паял по печатке surf rev1.2 (от АpBerg), её можно скачать в архиве . Плата в лай. файле правильная, схема после сборки работает сразу — только ноль на выходе микросхемы NE5534 нужно подстроить. Что понравилось в металлоискателе, так это чувствительность к мелким предметам (дробинки, мелкая золотая сережка сложной формы, булавка), возможность ручкой DELAY отсечь мелкий металомусор из черного металла (гвозди, или предметы длинной формы из черняка дают двойной пик-пик).


Минусы — невозможность игнорировать различные пробки и железные предметы крупных размеров. Катушку для подводного детектора Underwater P.I мотал на трех литровой банке. Она содержит 25-30 витков проводом 0.5 мм. Эскиз катушки приведён ниже.

За неимением полевого транзистора IRF9640, поставил IRF9630. Относительно этой замены (и катушки) подбирал опорное сопротивление — ставил переменник и пробовал по дальности, поскольку осциллографа нет. Получилось 600 ом. Когда буду делать следующий экземпляр подводника, попробую найти правильные комплектующие и тщательней выполню настройку. Поставил кнопку на пинпоинтер, (должна быть Push-off), но можно было и не ставить. Прибор динамический, поэтому итак довольно точно определяет центр мишени. Плата интересная, длинная, хорошо помещается в тубу от клея — силикона.

Если поставить порты водозащитные, то получится полностью герметичный подводный металлоискатель, и можно будет с ним даже плавать. Остальные фото будут выложены позже в разделе «Конструкции». Автор: West3D.
Источник
Сборка подводного необитаемого аппарата



Шаг первый: что такое ROV и как это работает
ROV — это дистанционно управляемое подводное транспортное средство, которое находится под прямым управлением человека-оператора на поверхности. ROV может плавать, останавливаться, зависать и поднимать объект или образцы воды, грунта на поверхность с помощью манипулятора или другого механического устройства.
У данного подводного робота, который сделал мастер, нет никакого манипулятора или какого-либо механического устройства, чтобы поднимать какие-либо объекты на поверхность.
Работает это следующим образом:
Когда вертикальное подруливающее устройство создает тягу, поднимающую воду вверх, робот движется вниз. Когда горизонтальные подруливающие устройства создают обратную тягу, он движутся вперед.

Шаг второй: выбор конструкции для аппарата
Существует два основных вида самодельных аппаратов.
1) Конструкция Seafox.
2) Конструкция Seaperch.
После долгих размышлений мастер решил делать аппарат с дизайном Seafox.
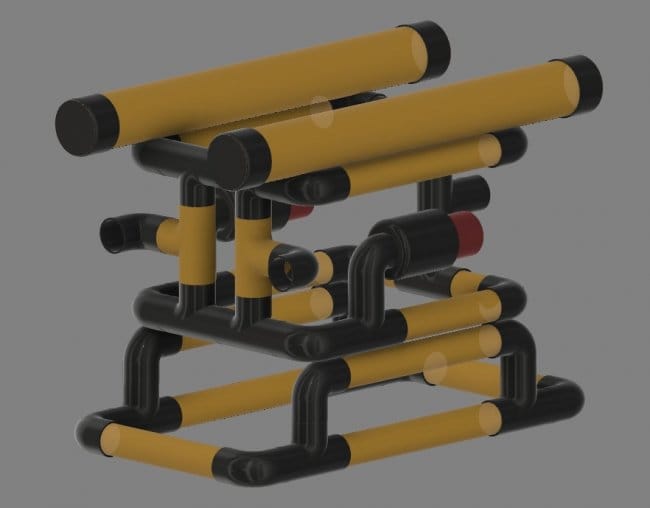
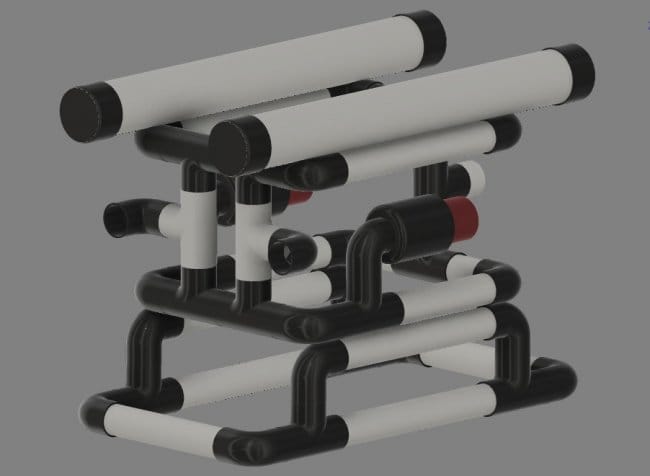
Конструкция этого аппарата следующая:
Две трубки в верхней части и нижняя часть с грузом для удержания баланса в воде. Верхние трубки заполнены воздухом, закрыты торцевыми крышками и полностью герметичны. Нижняя часть заполнена небольшими стеклянными шариками с отверстиями, через которые может поступать вода.




Шаг пятый: камера
Изображение с камеры FPV не качественное, поэтому мастер рекомендует использовать экшн-камеру, такую как GoPro, с водонепроницаемым футляром.
У камеры есть три провода, подключаем их следующим образом:
VCC >>> Положительная клемма аккумулятора (+)
GND >>> Отрицательный вывод аккумулятора (-) и провод заземления кабеля RCA.
Signal >>> Сигнальный провод кабеля RCA.
Корпус для камеры нужно сделать водонепроницаемым.
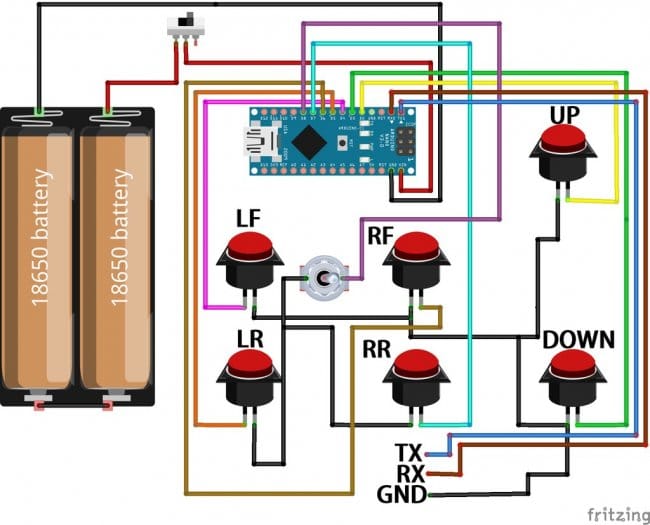
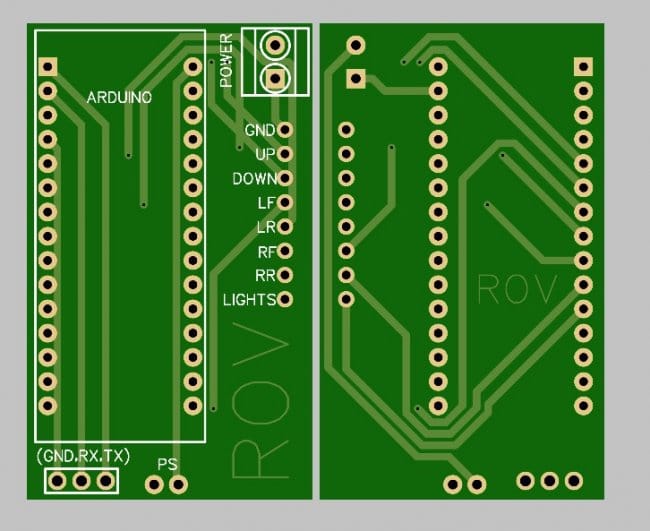
Шаг шестой: управление
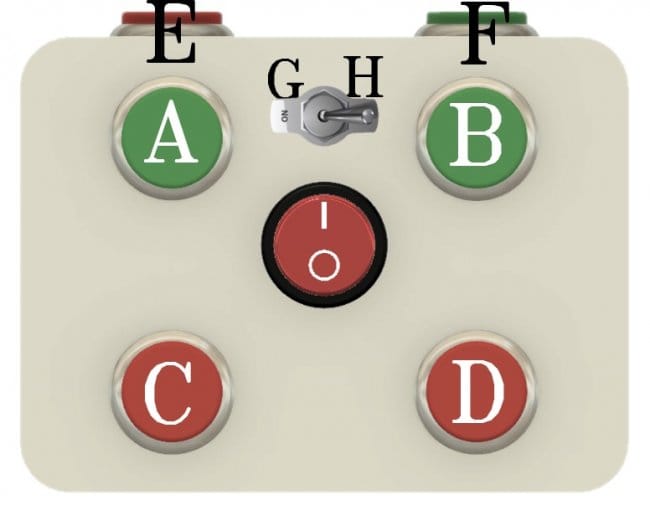
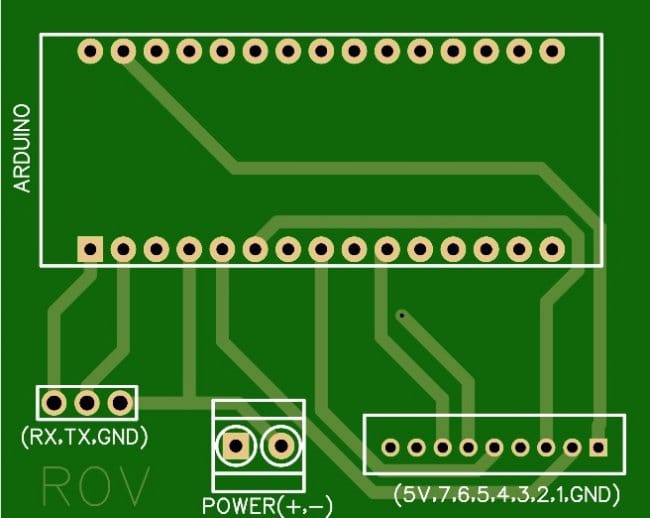
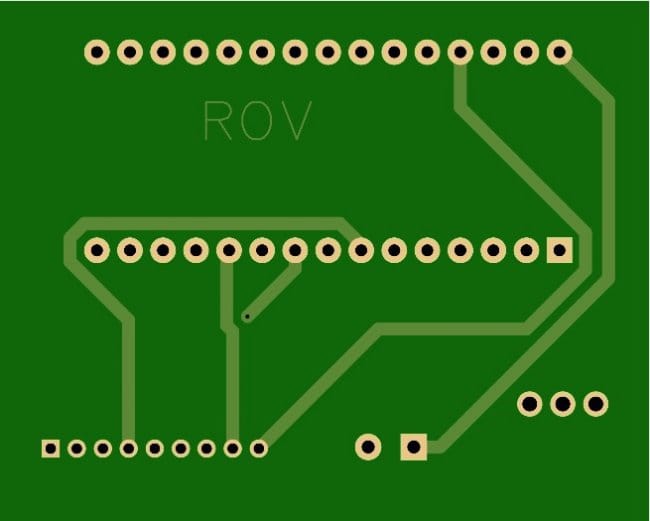
Аппарат управляется с земли посредством контроллера на Ардуино. Контроллер собирается в пластиковой коробке.
Для управления используются четыре кнопки без фиксации.




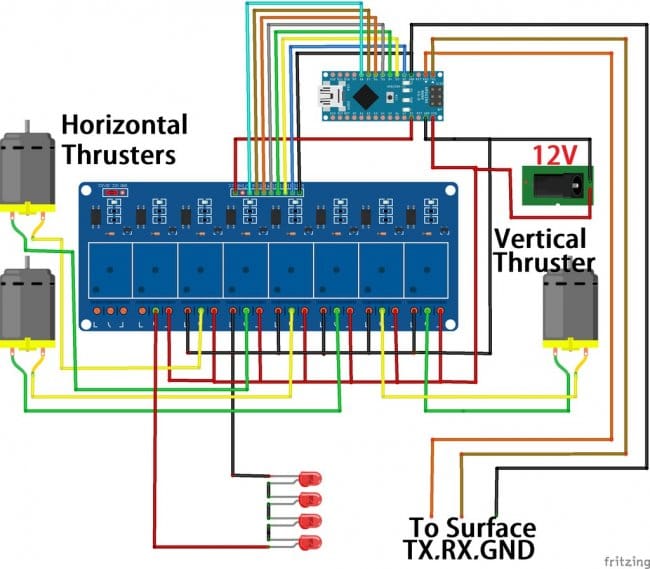
Шаг восьмой: провод
Для связи аппарата с контроллером управления мастер использовал провода длиной 30 метров. Два провода для TX и RX, еще два провода для сигнала камеры и заземления. Чтобы соединить 4 провода вместе, он использовал термоусадочную трубку диаметром 10 мм.
Другой вариант, использовать уличный провод для интернета.
Управление работает только для длины не более 40 метров.

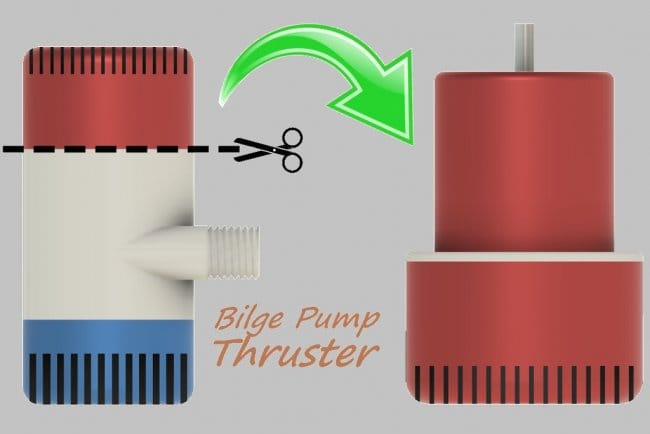
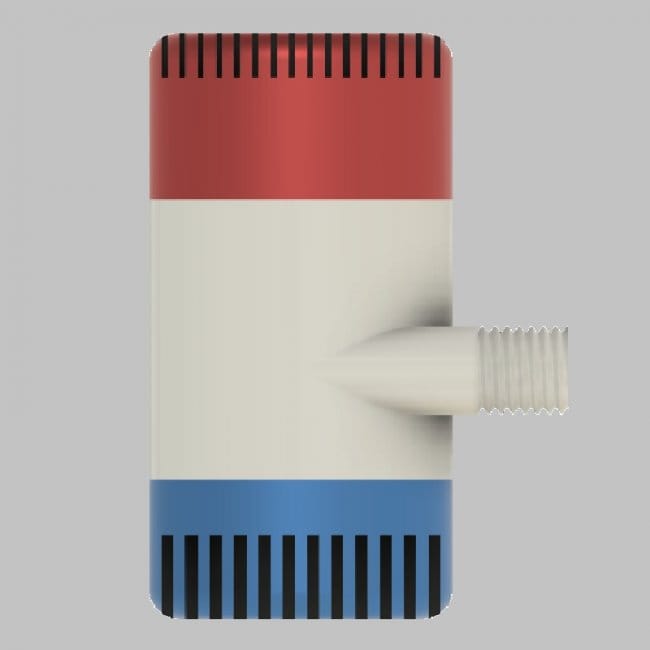
Шаг девятый: переделка трюмной помпы в подруливающее устройство
Двигатели, одна из основных частей аппарата. Для этого проекта можно использовать любые щеточные подруливающие устройства. Мастер использует помпу из-за ее характеристик.
Для всех трех подруливающих устройств он использует мощные трюмные насосы. Эти насосы уже водонепроницаемые и очень мощные.
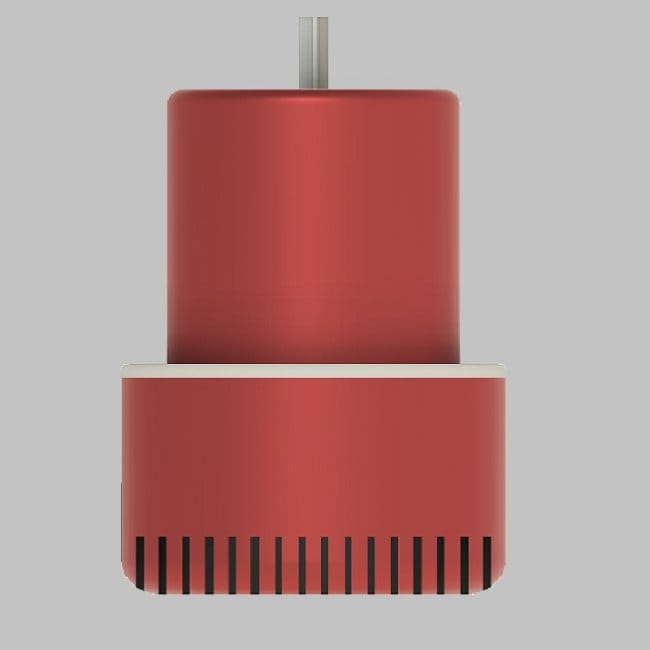
Чтобы превратить трюмный насос в подруливающее устройство, нужно удалить часть отмеченную белым и прикрепить гребной винт к валу двигателя.


Шаг одиннадцатый: питание
Сначала мастер попробовал питание по проводу с берега, но устройство работало с перебоями. Тогда он решил установить батарею на самом аппарате. Он использовал свинцово-кислотный аккумулятор 12В 7Ач. Аппарат потребляет около 14 А для всех двигателей и электроники. Аппарат может работать в воде около 30 минут.
Естественно, необходимо сделать для батареи водонепроницаемый корпус.
Источник
Форум Тетис
Ведущий форум о рекреационном и техническом дайвинге, подводной охоте и фридайвинге
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
Дайв компьютер — своими руками.

#1 Сообщение Hamlet » 30-03-2006 13:09 —> Добавлено: 30-03-2006 13:09 Заголовок сообщения: Дайв компьютер — своими руками.

#2 Сообщение KWAK » 30-03-2006 13:21 —> Добавлено: 30-03-2006 13:21 Заголовок сообщения:

#3 Сообщение VictorVideo » 30-03-2006 14:14 —> Добавлено: 30-03-2006 14:14 Заголовок сообщения:

#4 Сообщение Андрей Яшин » 30-03-2006 14:47 —> Добавлено: 30-03-2006 14:47 Заголовок сообщения:
#5 Сообщение Hamlet » 30-03-2006 16:39 —> Добавлено: 30-03-2006 16:39 Заголовок сообщения:
#6 Сообщение Hamlet » 30-03-2006 16:45 —> Добавлено: 30-03-2006 16:45 Заголовок сообщения:

#7 Сообщение Cableguy » 30-03-2006 16:47 —> Добавлено: 30-03-2006 16:47 Заголовок сообщения:
#8 Сообщение Hamlet » 30-03-2006 17:00 —> Добавлено: 30-03-2006 17:00 Заголовок сообщения:
#9 Сообщение VictorVideo » 30-03-2006 17:07 —> Добавлено: 30-03-2006 17:07 Заголовок сообщения:

#10 Сообщение Domoko » 30-03-2006 18:35 —> Добавлено: 30-03-2006 18:35 Заголовок сообщения:
я уже вроде давал ссылку на самодельный комп
http://www.peter-rachow.de/sbtc0.htm
всё на немецком
есть интересная разработка www.taminportal.de
4 прибора в одном (всё цифровое) — навигация, нитрокс-комп, манометр и компас
#11 Сообщение Андрей Яшин » 30-03-2006 18:41 —> Добавлено: 30-03-2006 18:41 Заголовок сообщения:
#12 Сообщение Hamlet » 30-03-2006 19:15 —> Добавлено: 30-03-2006 19:15 Заголовок сообщения:

#13 Сообщение CapitanBlack » 30-03-2006 19:17 —> Добавлено: 30-03-2006 19:17 Заголовок сообщения:
А если PDA в бокс + датчик давления и температуры + хорошую софтину для расчета параметров погружения? Есть же такие.
Только они дайв в статике считают, а нужно, что-бы показания в динамике пересчитывались.
Вообщем то Квак прав- гимора тут хоть отбавляй.
Источник



