
- 3D-SPrinter
- Меню навигации
- Пользовательские ссылки
- Информация о пользователе
- Самодельный подводный буксировщик 22 Lbs
- Сообщений 1 страница 5 из 5
- Поделиться12020-01-23 20:52:24
- Поделиться22020-01-30 04:46:42
- Поделиться32020-01-30 13:12:01
- Поделиться42020-01-30 14:18:16
- Поделиться52020-02-01 04:48:07
- Форум Тетис
- Самодельный подводный робот
- Водный скутер на электротяге
3D-SPrinter
Меню навигации
Пользовательские ссылки
Информация о пользователе
Вы здесь » 3D-SPrinter » Водный электротранспорт » Самодельный подводный буксировщик 22 Lbs
Самодельный подводный буксировщик 22 Lbs
Сообщений 1 страница 5 из 5
Поделиться12020-01-23 20:52:24
- Автор: 3D-SPrinter
- Администратор

- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09

Внимание! Это резервный форум. Основной форум здесь https://3deshnik.ru/forum/viewforum.php?f=35 .
Испытания первой версии подводного буксировщика проходили прошлым летом в Крыму. Подробности здесь https://3deshnik.ru/forum/viewtopic.php?f=19&t=926 .

Техническое видео без монтажа:
Буксировщик показал себя очень хорошо, но по результатам испытаний и «пожеланиям трудящихся» было решено внести некоторые изменения:
1. Вместо одной ручки установлены две стандартные. Потому что одна ручка не понравилась женщинам и детям.
2. Диаметр гребного винта увеличен до 150 мм и ещё немного оптимизирован (уменьшен шаг). Батарея уменьшена до 6S4P. Так получается дешевле, выше КПД и проще с выбором зарядника (подходит самый распространённый imaX B6). И при том же токе 20А тяга даже увеличилась до 11 кг (на полностью заряженном аккумуляторе).
3. На корпусе предусмотрены два штатных кронштейна под видеокамеру, свет и прочее навесное оборудование (база GoPro).
Вторая версия буксировщика:




Ещё фотки под спойлером:

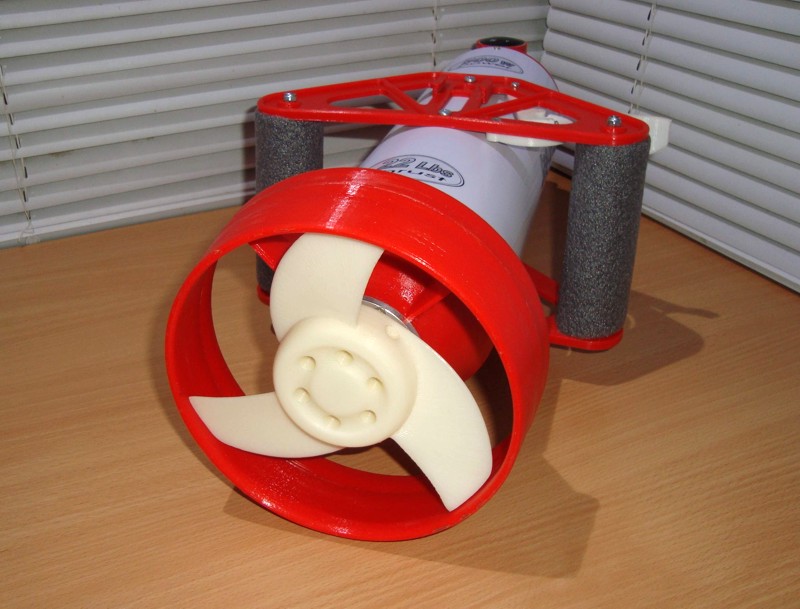



Основные технические характеристики:
— Долговременная тяга 10 кг (22 Lbs), реальная скорость до 5-6 км/ч (взрослого человека среднего телосложения).
— Глубина погружения (испытанная) до 5-6 метров. Для обычного человека (не дайвера) это предостаточно.
— Аккумуляторная батарея 6S4P на 24-х элементах 3300mah INR18650 общей ёмкостью 300 Вт/ч (в реальных условиях позволяет плавать до полутора часов).
— Бесколлекторный мотор Racerstar 5065 BR5065 140KV с прямой передачей на гребной винт.
— Габаритные размеры 485х235х170 мм (убирается в стандартный чемодан для путешествий).
— Вес 3 кг (без навесного оборудования).
— Избыточная плавучесть 0.5 литра (изменяется длиной цилиндрической части корпуса).
— Примерная стоимость постройки = 12500 руб. вместе со стоимостью КИТа для сборки (из них стоимость комплектухи с алишки около = 8000 руб.).
Т.е. заметьте — собрать такой аппарат из КИТа дешевле, чем купить такое «ведро» ( без аккумулятора. ) на алишке https://aliexpress.ru/item/33027624821. … 8&mp=1 , которое вообще не тянет (килограмм 5-6 от силы), протекает и через пару сезонов превращается вот в это http://images.vfl.ru/ii/1534626154/b24b … 945469.jpg .
Цена близкого по ТТХ буксировщика MagicJet https://aquarobotman.com/pages/magicjet с вдвое меньшим аккумулятором = $699 на Амазоне https://www.amazon.com/gp/product/B07T6HT2GG?th=1 .
Поделиться22020-01-30 04:46:42
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
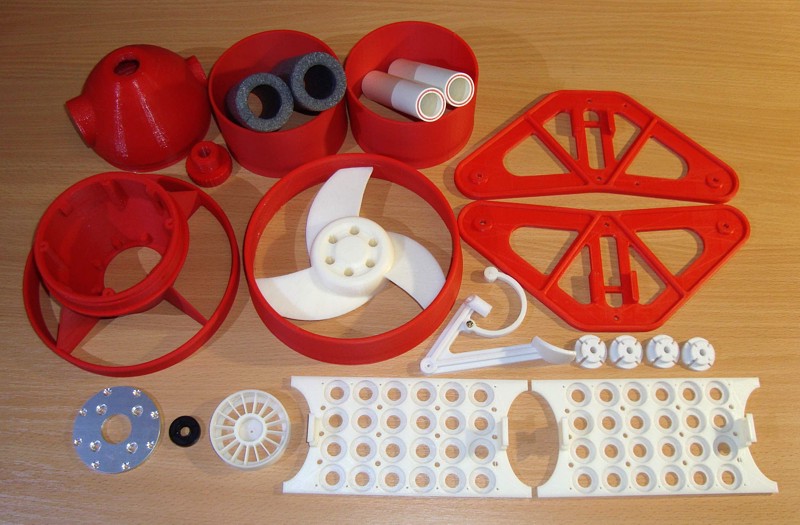
Список комплектующих для сборки буксировщика:
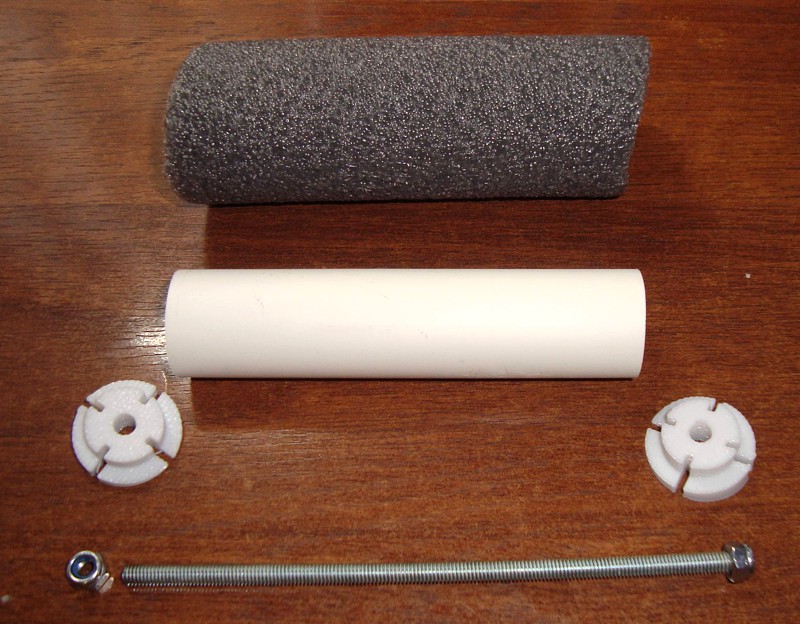
Основные детали буксировщика напечатаны пластиком PLA на 3д-принтере. Цилиндрическая вставка корпуса изготовлена из кан-трубы диаметром 110 мм. с толщиной стенки 3 мм. Длина 320 мм. Снаружи труба оклеена белой плёнкой-самоклейкой. Гребной винт напечатан из натурального (без красителей) пластика ABS, доработан «напильником» и доведён до блеска ацетоном. Ручки изготовлены из пластиковой водопроводной трубы диаметром 25 мм.
КИТ для сборки буксировщика:
Гребной винт дорабатывается наждачной бумагой и протирается сильно смоченной в ацетоне тряпочкой.

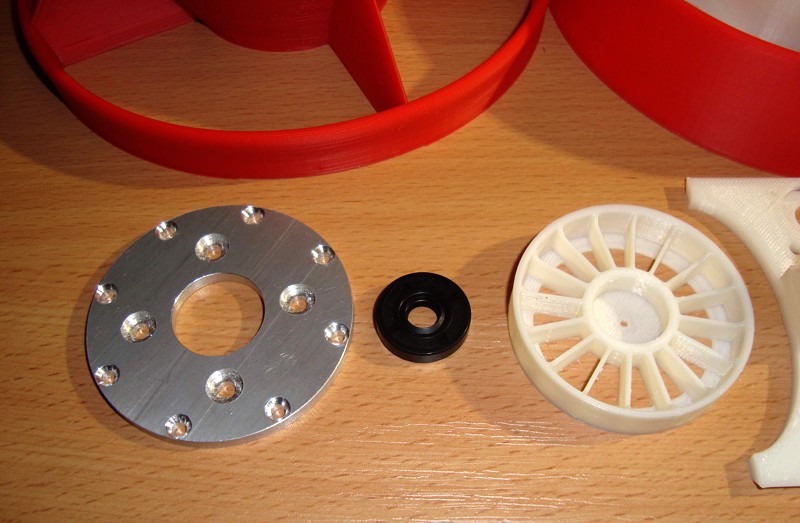
Так же в состав КИТа входит фрезерованный фланец мотора из алюминия толщиной 4 мм и «морской» сальник гребного вала с внешней манжетой. Алюминиевый фланец необходим для эффективного охлаждения мотора. При установке мотора на пластиковый корпус http://images.vfl.ru/ii/1563972812/93c6 … 318111.jpg долговременная сила тока 8-10А, с алюминиевым фланцем 20А.
Задняя часть насадки гребного винта приклеивается к моторной части дихлорэтаном https://www.chipdip.ru/product/09-3967-rexant . В дихлорэтане желательно развести некоторое количество PLA-пластика до получения «густоты» клея на уровне «моторного масла». Затем все детали из PLA-пластика тщательно покрываются жидким акриловым лаком в 3-4 слоя (снаружи и изнутри). Такое покрытие полностью герметизирует печатные детали. Без покрытия лаком внутрь деталей и даже внутрь корпуса буксировщика может просачиваться вода. Наиболее подходящий лак — для влагозащиты печатных плат и электроники PLASTIK-71 https://www.chipdip.ru/product/plastik-71-100 .

Поделиться32020-01-30 13:12:01
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
Для надёжной герметизации деталей буксировщика лучше всего подходит казанский герметик-прокладка марки BSI.

Фланец мотора устанавливается на герметик, саморезы и винты тоже завинчиваются на герметик. Лишний герметик стирается тряпкой сразу после после сборки.


Сальник гребного вала набивается консистентной влагостойкой смазкой.
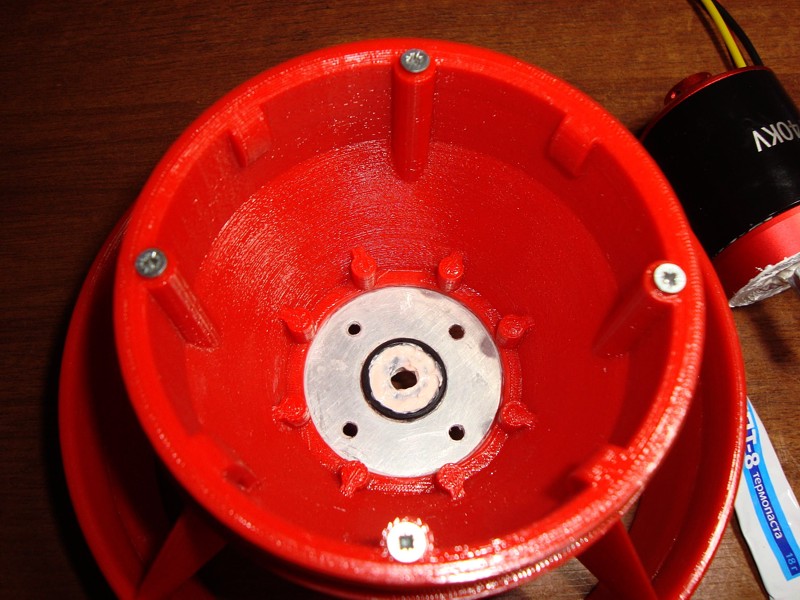
Передняя крышка мотора смазывается теплопроводной пастой КПТ-8, а подшипник — консистентной смазкой.

Далее мотор привинчивается к алюминиевому фланцу нержавеющими винтами М4 с герметиком. Лишний герметик стирается тряпкой.

После высыхания герметика всё это желательно покрыть несколькими слоями лака PLASTIK-71.
Дальше собирается передняя крышка буксировщика. Вольтметр и герметичный разъём зарядки устанавливаются на герметик и прижимаются изнутри штатными гайками. Контрольная пробка служит для оперативной проверки, не попала ли вода внутрь корпуса, и для включения-выключения тумблеров питания. Все три тумблера соединены параллельно, потому что их 15 Ампер китайские (один тумлер сгорит, два будут греться, три — потянут). Через тумблеры батарея подключается к контроллеру мотора и вольтметру. Разъём зарядки подключён напрямую к аккумулятору.


Поделиться42020-01-30 14:18:16
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
Дальше собираются ручки буксировщика. К верхней панели ручек привинчивается рычаг «газа» с магнитами и возвратная пружина. Винты М3 завинчиваются в рычаг и пружину без нарезки резьбы с натягом. Пружина притягивается к красной панели «намертво», а соединение с рычагом делается шарнирным. В рычаге установлено два магнита последовательно для усиления поля, действующего на датчик Холла, установленный внутри корпуса буксировщика. Перед вклейкой магнитов в рычаг нужно не перепутать их полюса, потому что датчик Холла одним полюсом открывается, а вторым нет. Рычаг и пружина печатаются из пластика PETG.

Для улучшения эргономики ручки наклонены на угол 12 градусов относительно продольной плоскости (ватерлинии) буксировщика и «одеты» в мягкую оболочку (термоизоляция для труб). Верхняя и нижняя панели ручек стянуты обрезками шпилек М5. Шпильки и гайки из «чёрного» металла желательно покрыть лаком PLASTIK-71.

Верхняя панель ручек привинчивается винтами М4х10 к цилиндрической вставке корпуса по центру, нижняя панель — со смещением на 22 мм назад. Отверстия под винты сверлятся диаметром 3.5 мм, винты завинчиваются без нарезки резьбы внатяг. Изнутри корпуса винты смазываются герметиком и притягиваются гайками М4.

Поделиться52020-02-01 04:48:07
- Автор: 3D-SPrinter
- Администратор
- Откуда: Н.Новгород
- Сообщений: 91
- Последний визит:
2021-09-24 17:14:09
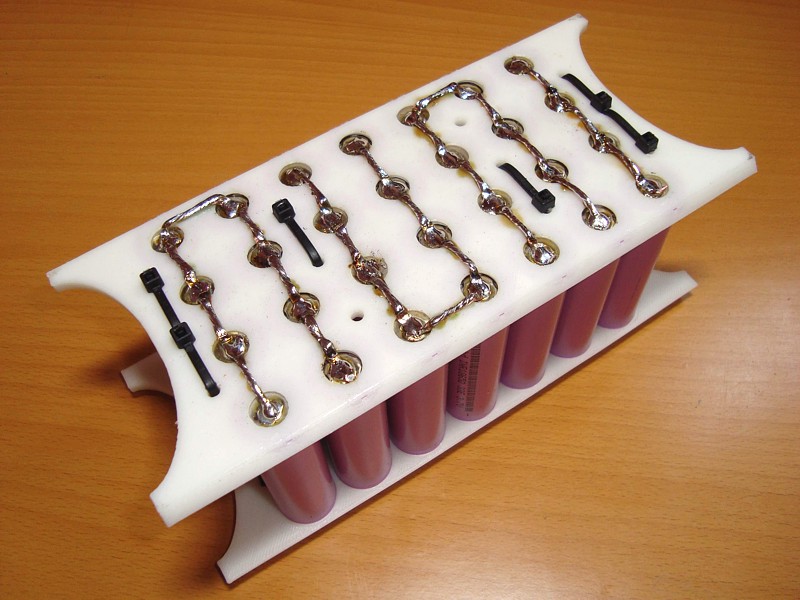
Аккумуляторная батарея 6S4P собирается в напечатанном из пластика ABS картридже:

Верхняя и нижняя панели картриджа фиксируются стяжками. Перед установкой аккумуляторов в картриж места пайки зачищаются наждачной бумагой, обрабатываются флюсом ЛТИ-120 и быстро лудятся мощным паяльником припоем ПОС-61. Банки спаиваются многожильным медным проводом сечением 1.5-2 квадрата.
Далее припаиваются силовые провода батареи 14AWG с разъёмами, балансирный разъём с проводами, аккумуляторная батарея оклеивается армированным скотчем. В задней части батареи крепится контроллер мотора (ESC).
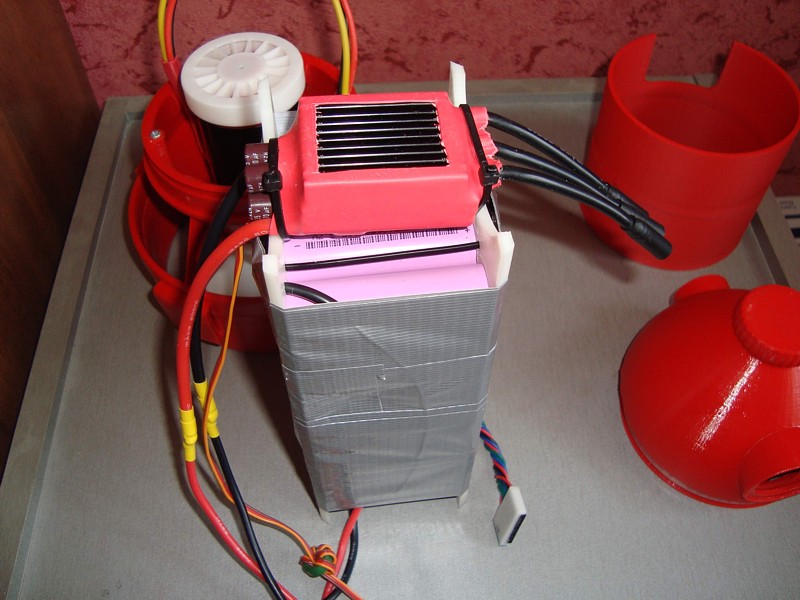
PPM-сигнал для управления контроллером мотора формируется платой Arduino NANO с датчиком Холла. Датчик холла управяляется магнитом, находящимся на рычаге «газа» на правой ручке буксировщика. Ардуину и контроллер мотора очень желательно тщательно покрыть лаком PLASTIK-71. Питание +5В поступает на Ардуину с BEC контроллера. Через этот же разъём с ноги D2 Ардуины подаётся PPM-сигнал. Датчик Холла подключается к +5В / GND Ардуины, управляющая нога датчика подключена к А0 Ардуины.
Источник
Форум Тетис
Ведущий форум о рекреационном и техническом дайвинге, подводной охоте и фридайвинге
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
Самодельный подводный робот

#1 Сообщение Shenzhen » 09-10-2016 01:19 —> Добавлено: 09-10-2016 01:19 Заголовок сообщения: Самодельный подводный робот
Год назад мы с отцом приступили к созданию подводного робота — Аватара. Наконец все работы завершены и сегодня Аватар был успешно испытан на Щелковском доломитовом карьере.
Для двигателей использованы бесколлекторные моторы. Для моторов были разработаны и напечатаны на 3д принтере держатели с кольцевыми насадками, которые значительно повысили эффективность работы. Максимальная тяга одного двигателя 4 кг. Управление с вертолетного джойстика по витой паре. Будет установлена клешня-манипулятор (временно демонтирована) и дополнительный двигатель для перемещения влево/вправо. Робот испытан на 30 метров, но при незначительных доработках сможет погружаться до 200. Оператор управляет в виртуальных очках, зрители могут смотреть на простом телевизоре. Аватар предназначен для изучения водоемов, сопровождения дайверов, организации видео трансляции подводных событий на поверхность, фото/видео съемки, поиска и подъема затонувших предметов.
Самодельный подводный робот
Подводный робот своими руками
Как сделать подводного робота
Подводный робот на 3d принтере
ROV thruster
Моторы для подводного робота
Испытания подводного робота
Источник
Водный скутер на электротяге

Привет любителям помастерить, сегодня мы рассмотрим, как изготовить водный скутер. С такой самоделкой можно довольно быстро плавать, это не только интересно, но в некоторых случаях и полезно. В действие самоделка приводится электрическими редукторными двигателями, а работает все это дело на аккумуляторах. Корпус скутера изготовлен из сантехнических деталей, которые можно легко найти в любом строительном. Если вас заинтересовал проект, предлагаю изучить самоделку более детально!
Материалы и инструменты, которые использовал автор:
Список материалов:
— два редукторных двигателя на 18В ;
— трубы, заглушки, уголки (и прочие сантехнические детали для корпуса);
— герметик, эпоксидный клей;
— винты и гайки;
— гребные винты ;
— резина от автомобильной или велосипедной камеры;
— соединительные муфты;
— проволока;
— мощный рубильник;
— провода;
— аккумуляторы (способные питать выбранные двигатели).


Процесс изготовления скутера:
Шаг первый. Корпус
Первым делом изготовим корпус для самоделки, для этих целей нам понадобятся сантехнические детали. Основным телом корпуса является кусок трубы диаметром 110, режем детали, ну а далее склеиваем хорошим клеем. В качестве клея можно использовать эпоксидный или специальный клей для сантехнический труб. Важно понимать, что все соединения должны быть герметичными, иначе вода быстро выведет из строя двигатели и аккумулятор. Сверху все стыки можно хорошо обмазать специальным герметиком.
Источник



