
Самодельный режущий плоттер
Тема раздела Общие вопросы в категории Станки ЧПУ, Hobby CNC, инструмент; Добрго дня, коллеги! Так открытая мною тема уже закрыта за давностью лет, поэтому начну заново. Может идеи кому-то пригодятся. И .
Опции темы
Самодельный режущий плоттер
Добрго дня, коллеги!
Так открытая мною тема уже закрыта за давностью лет, поэтому начну заново.
Может идеи кому-то пригодятся.
И так. Идея резать пленку для декалей или трафаретов мучила меня всегда. И особенно сильнее мучили цены на готовые девайсы для резки пленки. Хотя в городе у нас есть контора, где можно порезать пленку, но хозяин конторы очень не конкретный и тяжелый в общении человек, что итди туда нет никакого желания. Мысли о постройке блуждают в голове с 2006 года. Тупиком в идее построить плоттер был собственно флюгерный нож. На тот момент ножи и держатели стоили под 100 евро, что не бюджетно. Но охота пуще неволи, решил строить, а как сделать нож — придумаю попозже. Так и вышло, пока, гуляя по китайским инет-шопам, не увидел держатель ножа с тремя ножами в комплекте за 15 баксов! Вторым тупиков в конструкции плоттера явился вал подачи пленки. В промышленных плоттерах он рифленый, для предотвращения проскальзывания пленки. Сделать такой без станков не возможно. Выход был найден случайно, когда шкрурил какую-то детальку круглой трубкой, обернутой наждачкой. А почему бы не оклеить подающий резиновый вал крупной наждачной бумагой и получить такой-же как заводской шероховатый подающий вал? Так и сделал. Чтобы не было ступеньки на стыке наждачки вал был оклеен узкой лентой наждачки по спирали, т.о. стык торцев наждачной бумаги тоже расположился по спирали вокруг вала. Эта идея — основа этого плоттера. Остальные запчасти для сборки — годами накапливаемые втулки, валы, шестеренки и шаговые движки от принтеров.
Вот так был прикинута компноновка с SW:

Затем из фанеры 10мм были вырезаны боковины и площадка-перемычка:

Вал до оклейки наждачкой. Для прижима пленки имеется еще один вал, который держится на качалках из карбона 3мм (просто попался под руку). На фото в этих качалках вклеены втулки, которые в последствии были заменены подшипниками качения, а то с втулками подача бумаги и пленки была не качественной.

Горизонтальная ось — П-образный профиль оборудован подпружиненным механизмом натяжения ремня, а также служит для второй направляющей для каретки головки и также на ней закреплен ШД.

Контроллер — 3 канальный, для возможности сделать тангенциальный привод ножа, но сейчас с флюгерным ножом один канал не используется. Схема — своя, за основу взят в инете контроллер на PIC12C509. Три канала — три PICа, три силовых ключевых выходных каскадов для ШД и один силовой каскад для соленоида режущей головки.




О головке. Основа — плитка из дюраля 8 мм, к который прикручен соленоид от какого-то кассового аппарата (там он орудовал ножом отрезки чековой ленты), и две направляющие: основная, перемещается во втулках; вторая — для предотвращения проворачивания вокруг первой направляющей, зажата между двумя подшипниками, один из которых неподвижный, второй на качалке, позволяющей регулировать поджим.
Для поворота вала подачи пленки используется двухступенчатый редуктор. Причина — шаговый мотор имеет угол поворота 7,5 градусов, что очень много. Пришлось поделить угол редуктором. Для исключения мертвого хода редуктора использована двойная подпружиненная шестеренка (от какого-то принтера). Благодаря ей не происходит накопление погрешности перемещения пленки.
Для управления всей этой конструкцией используется Mach3. Для управления подъемом и опусканием ножа используется сигнал DIR одного из каналов, выведенный на силовой ключ в схеме контроллера.
Скажу сразу, что полной схемы нет, плата делалась по соображением, из головы 
Важным моментом качественной резки является использование компенсации оффсета ножа. Если кто не знает, то нож — это флюгер, режущая часть ножа не совпадает с осью его вращения, сдвинут в сторону. Типа как ножка у тележки в супермаркете. Куда едет головка, туда и поворачивается нож.
Но все это хорошо и понятно для криволинейных резов, а что делать с углами, особенно острыми? Для это в спец. софте промышленных плоттеров управляющая станком программа делает дополнительные движения на углах, заставляя поворачиваться нож строго по траектории. И тут возникает проблема, как самодельной конструкции и с использованием обычных CAM-программ сделать такую-же компенсацию оффсета ножа? Выход был найден на просторах инета. Один умелец написал небольшую утилитку, работает в среде Python-2.7 и умеет задавать компенсацию оффсета на углах у ЛЮБОЙ ГОТОВОЙ УП Арткама!
Все эти составляющие и послужили успеху создание домашней резалки. Сегодня опробовал на резке декалек для WindN. Оракал режет изумительно, как промышненный резак. Всякие самоклейки из хозтоваров качественно порезать не удалось, сам пленка «резиновая», нож вязнет и не режет как нужно. Скотч, наклеенный на подложку из оракала режет хорошо, только часто на острых углах скотч имеет задиры.

Тут пару видео как режет и как отделяется от основы пленка:
Если заменить нож на шариковую ручку (ее нужно доработать — стержень должен быть подпружинен для постоянного хорошо прижима к поверхности, а то будет плохо рисовать), можно наносить рисунки на фанеру (есть на фото выше в тексте) или любой листовой материал.
Вот как-то так 
Источник
Плоттер из старых принтеров на основе Arduino


Из таких можно достать направляющие полированные валы. Нам их надо 4. Чем длиннее, тем больше площадь обрабатываемой поверхности мы получим. И шаговые двигатели там тоже имеются. Среди струйных тоже можно найти достойных доноров, например, Canon BJC-1000

В нем также имеются и направляющие и шаговые двигатели. Круто будет если вместе с направляющими вам будут попадаться и подшипники скольжения к ним. Принтеры, ровесники HP 3745 и подобных, уже имеют внутри коллекторные двигатели, а не шаговые. Хотя, по современным меркам, это уже старье, но они нам не подойдут. Кроме того, из них крайне сложно извлечь направляющие, из-за того, что на них надевают резиновые ролики. При снятие этих роликов, на валах часто остаются следы от них, которые будут мешать свободному движению по ним.

В общем, ищем дряхлые принтеры и вынимаем из них все что можно.
Шаг 2 Собираем корпус.
Для корпуса нам понадобиться листовой материал достаточной жесткости, например, фанера толщиной от 6 мм. У меня такой не было под руками, поэтому я буду использовать OSB панель толщиной 12 мм. Не самый лучший материал для этого, но и с ним можно сделать такой плоттер. У нас будет две оси. Ось X для перемещения кареты с пишущим инструментом. Ось Y для перемещения оси X. Для начала необходимо определиться с размерами нашего плоттера. Размеры зависят от направляющих (или полированных валов), которые вы вытащили из принтеров. Нам нужно добыть 4 направляющие. По две на одну ось. Если они разной толщины, те, что толще берем на ось Y, потоньше на ось X. Размеры высчитываем следующим образом:
Длина станка = (длина направляющие для оси Y) – 2 х (толщина материала) + 100 мм
Ширина станка = (длина направляющие для оси X) — 2 х (толщина материала)
В моем случае получаем:
Длина станка = 290 – 2 х 12 + 100 = 366 мм
Ширина станка = 260 – 2 х 6 = 248 мм
Начнем делать основу для оси Y. Для нее нам понадобиться 5 прямоугольников. Если ваши направляющие отличаются, размеры надо пересчитать. Вырезаем три прямоугольника размерами 248 мм х 60 мм. Еще два 266 мм х 20 мм.

Берем два больших прямоугольника. Сверлить в них отверстия будет лучше, если их предварительно соединить между собой. Они должны быть одинаковые. Для начала вымеряем середины по короткой стороне и проводим продольную линию. Затем отступаем по линии от краев по 20 мм и сверлим там отверстия диаметром ваших направляющих для оси Y. У меня это 8 мм. Находим середину на линии и сверли отверстие диаметром 16 мм для подшипника. Должно получиться следующее:

Собираем как показано на фото. Внутренние прямоугольники должны быть на расстоянии 40 мм от краев. Не забываем про треугольники по углам, для придания жесткости нашей конструкции.

Красим по желанию. У меня как раз осталась немного краски в баллончике.

Теперь собираем Ось X. Для нее нам понадобятся 4 прямоугольника. Два размерами 60 мм х 180 мм, и два 248 мм х 30 мм. Их лучше вырезать из материала потоньше, чтобы были легче. Теперь насчет подшипников для направляющих. В идеале их стоит купить, выбрав под толщину направляющих. Если оби будут в принтерах вместе с направляющими, тоже хорошо. На крайний случай, можно сделать, как я. Взять соединительные гайки соответствующего диаметра и сверлом срезать внутри резьбу. Сделав из некое подобие подшипника. Вариант кустарный, но мною проверен на практике, люфт совсем небольшой, практически не заметен, но направляющие необходимо будет смазать. Должно получиться нечто подобное:

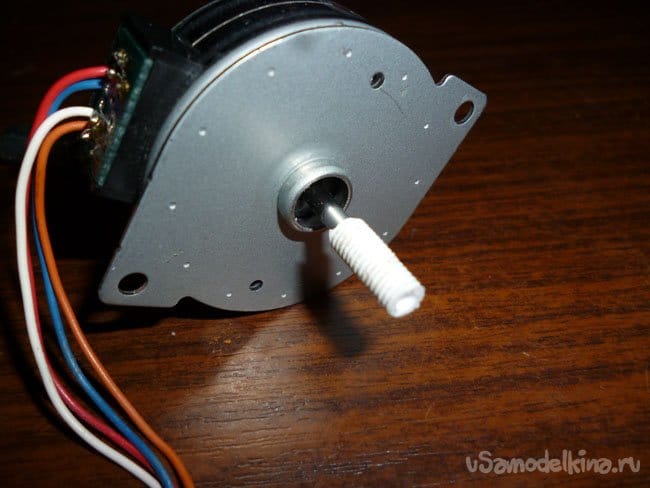
Переходим к шаговым двигателям. Вынимает их из принтеров. Ищем в интернете документацию на них, чтобы узнать тип двигателя и количество шагов на оборот. В мое принтере попался такой

Второй очень похож, но у первого 48 шагов\оборот, а у второго 96 шагов \оборот. Позже мы их будем сравняем, используя микрошаг. Теперь необходимо соединить выходной вал двигателя и строительную шпильку, которая будет двигать оси. Для этого нам понадобиться Чупа-Чупс. Только большой. Съедаем чупс, а палочку оставляет. Внутренний диаметр палочки отлично подходит для выходного вала. А снаружи мы, используя метчик М5, нарезаем резьбу.

Отрезаем кусочек с резьбой, диной примерно 15 мм. Надеваем его на выходной вала шагового двигателя:
Придерживая вал плоскогубцами, накручиваем соединительную гайка на вал. Палочка пластиковая, поэтому гайка накручивается достаточно плотно и не будет откручивать.


Крепим шаговый на плоттере.

Накручиваем на него шпильку, на шпильке должна быть накручена еще одна соединительная гайка, для крепления осей.

С другой стороны, вставляем подшипник, продеваем в него шпильку и фиксируем гайками


Совмещаем гайку и ось. Заливаем все термоклеем. Прочности клея достаточно, чтобы удержать оси.

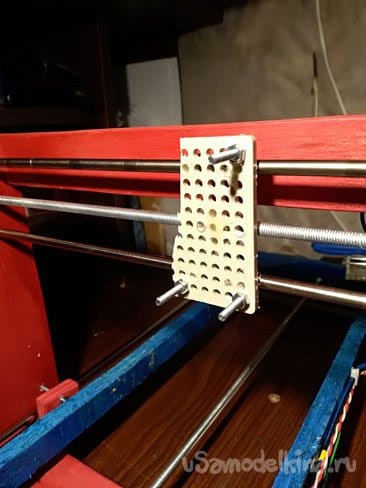
Для оси X нужно сделать карету и к ней приклеить подшипники
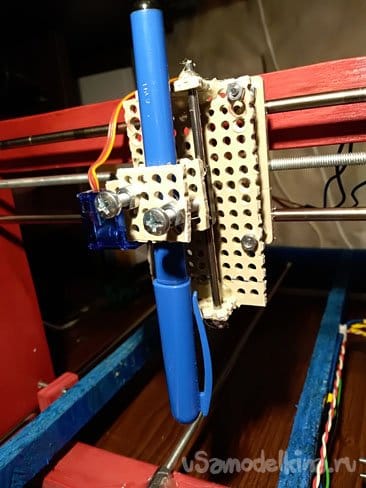
Рабочий инструмент выглядит так
Шаг 3 Электрика.
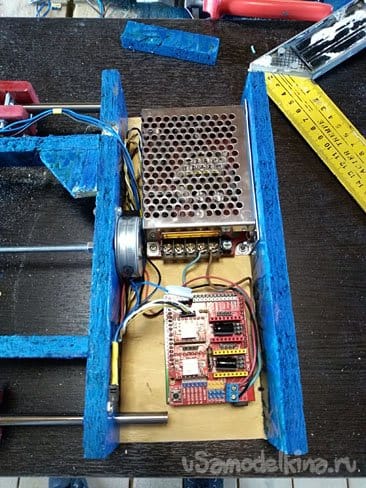
В конце станка к низу прикручиваем прямоугольник из тонкой фанеры, размеров 248 мм х 100 мм. Это будет место под установку электрики. Прикручивает Arduino

Сверху ставим CNC Shield v3. Предварительно стоит выставить настройки для микрошаг. У меня один шаговый на 48 ш\об, второй 96 ш\об. Что сравнять их ставим
48 х 16 = 768
Для первого ставим микрошаг равный 16
96 х 8 =768
Для второго ставим микрошаг 8.
Затем сверху ставим драйвера шаговых двигателей и после этого весть CNC Shield ставим на Arduino.
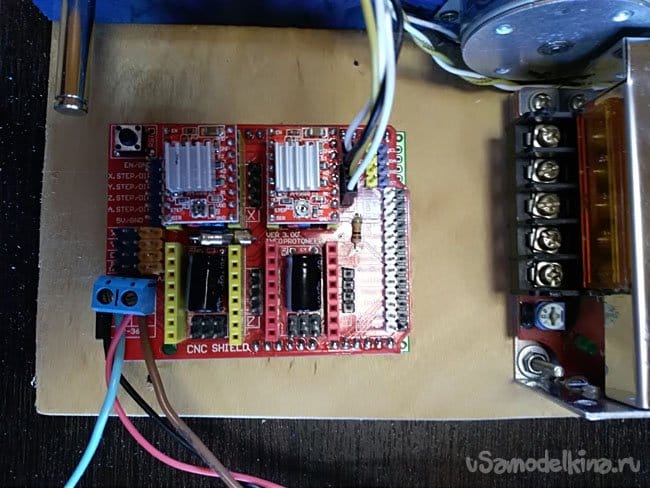
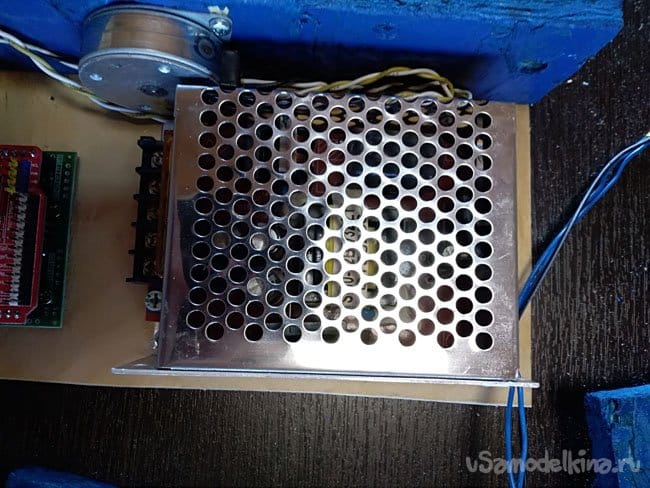
С другой стороны, ставим блок питания на 12В.
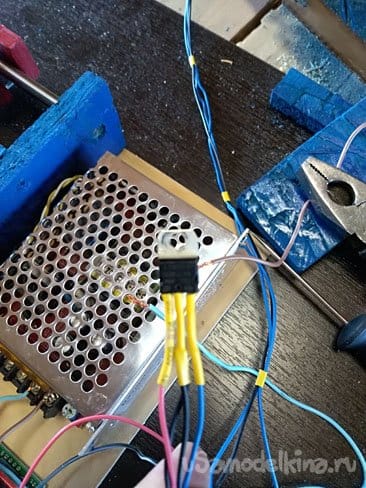
Опускать и подымать рабочий инструмент будет сервопривод SG90. Крайне не рекомендую подавать на него 12 вольт. Поэтому ставим стабилизатор напряжения на 5В, в разрыв провода питания.
Arduino соединяется с компьютеров через провод USB. Лучше зафиксировать его, чтобы случайно не вырвать

В сборе все получается так:
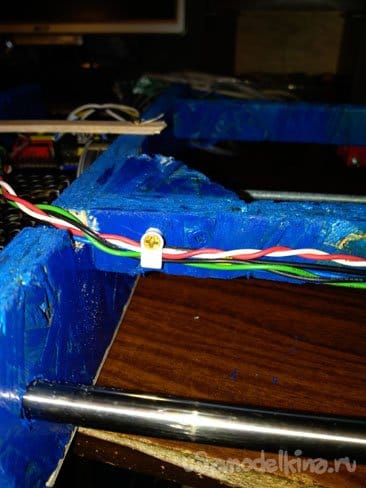
Провода, идущие к оси X и рабочему инструменты, необходимо зафиксировать на корпусе
Шаг 4 Программные средства.
Для начала скачаем Arduino IDE, самую свежую версию с официального сайта проекта:
https://www.arduino.cc/en/Main/Software
Плоттер будет работать на прошивке GRBL. Для того чтобы, он мог управлять сервоприводом, необходимо использвать специально подготовленую для этого прошивку. Скачать ее можно с сайта.
Прошивка распространяется в виде библиотеки для Arduino IDE. Поэтому скаченный архив надо перенести в папку «libraries». Затем запустив Arduino IDE, ищем в примерах grbl-servo-master. Открывает, выбираем плату Arduino UNO, выбираем com-порт к которому она подключена и нажимаем залить скетч.
Внимание! Если у вас должна быть установлена только одна библиотека GRBL. Если их будет несколько, компиляция и заливка пройдет успешно, но работать как надо плоттер не будет.
И осталась программа для отправки g-кода на плоттер.
Источник



