
- Автономная поисковая пищалка JHE42B на авиамодель
- Активируем пищалку (Beeper mode)
- Выбор пищалки
- Используем RSSI в пульте
- Пищалка с автономным питанием
- Где купить автономную поисковую пищалку
- Loc8tor Lite
- tBeacon GPS Tracker
- Зуммер на CC3D
- SVA_sar
- Автономная пищалка для поиска коптера.
- Пищим двигателями для быстрого поиска упавшего коптера | RCDetails Blog
- Что нужно для сборки квадрокоптера? инструменты
- Вступление
- Fullspeed lucky box 90db
- Jhe42b 110dbi finder buzzer
- Jhe42b_s 110dbi finder buzzer
- Lantian hxz01 110dbi finder buzzer
- Vifly finder 2 super loud, 100db
- Вкладка osd
- Вкладка командная строка (cli)
- Вкладка конфигурация
- Вкладка моторы
- Вкладка питание и батарея
- Вкладка порты
- Вкладка приемник
- Вкладка режимы
- Вкладка система
- Выбор пищалки
- Для чего используются пищалки на коптерах?
- Используем возможности протокола dshot в betaflight
- История изменений
- Как выбрать пищалку для квадрокоптера
- Как использовать пищалку в квадрокоптере
- Монтаж caddx tarsier 4k в стэк, в башню
- Монтаж приемника
- Монтаж проводов для камеры
- Пищалка (buzzer, зуммер) для квадрокоптера
- Пищалки для квадрокоптеров
- Подключаем пищалку к коптеру
- Подключение моторов квадрокоптера: установка двигателей
- Поисковая пищалка своими руками
- Последние штрихи
- Пошаговая сборка квадрокоптера своими руками на mamba f405 с fpv камерой caddx tarsier 4k
- Принцип работы
- Прошиваем полетный контроллер в betaflight configurator
- Прошивка и настройка квадрокоптера после сборки своими руками
- Прошивка регуляторов оборотов в blhelisuite
- Сборка рамы
- Схема монтажа
- Таблица компонентов и примерная цена
- Технические характеристики
- Установка видеопередатчика и пищалки
- Установка полетного контроллера
- Функции
- Электроника квадрокоптера и другие компоненты
- Заключение
Автономная поисковая пищалка JHE42B на авиамодель
Активируем пищалку (Beeper mode)
Надеюсь, она у вас есть. Если нет, тогда читайте инструкцию по установке и настройке, не забудьте её активировать на вкладке Modes в Betaflight (англ). Ну и помимо пищалки полезно настроить DShot ESC Beacon (пищание регуляторами).
Недостаток пищалки — её не очень далеко слышно.
Если у вас сохранилась телеметрия, но вы не слышите пищалку, тогда скорее всего вы слишком далеко. Попробуйте другой метод поиска.
Выбор пищалки
- Для поиска потерянной модели — если коптер упал в траву, то можно сориентироваться по звуку
- Предупреждение о низком заряде аккумулятора
- Статус коптера — писк может помочь выяснить режим, в котором находится коптер, например, если коптер готов к полету — 3 писка, если есть проблемы с приемом сигнала — непрерывный писк и т.д.
Существует 2 вида пищалок: активные и пассивные.
Активные пищалки издают звуки пока на них подано постоянное напряжение, в то время как пассивным пищалкам требуется переменное напряжение (звуковой сигнал). Полетные контроллеры обычно имеют 2х контактный разъем с напряжением 5 вольт, как раз для активных пищалок. Активные пищалки — дешевые, легкие и их легко купить онлайн.
Если вы все еще не уверены какой тип нужен, то просто купите активную пищалку.

Фирма Matek выпускает разные клёвые пищалки. Например: Loud Buzzer (громкая пищалка) — работает как обычная пищалка, и дополнительно управляется через один из каналов передатчика (PWM сигнал), т.е. можно включать тумблером на аппаратуре управления.
А вот этот LED tail light buzzer (задние фонари с пищалкой) — работает как вышеупомянутый, но дополнительно имеет RGB светодиоды.
Не перепутайте эти пищалки с индикаторами заряда аккумуляторов. Индикаторы заряда имеют пищалку, но их подключают к балансирному разъему аккумуляторов. Вот еще способы контроля напряжения аккумуляторов (англ).

Это индикатор напряжения, а не просто сирена
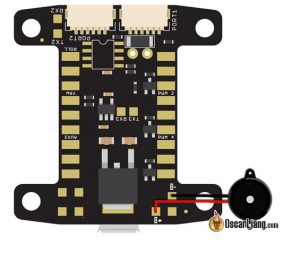
Пример подключения активной пищалки к полетному контроллеру
Тут все просто — смотрите на картинку выше, плюс и минус цепляем к соответствующим контактам полетного контроллера, а управляющий зеленый провод на минусовой выход Buzzer.
Если ваш полетный контроллер дрона не имеет такой возможности, то смотрите дальше, про подключение через канал приемника.
Используем RSSI в пульте
Не все знают об этом простом и полезном способе поиска!
Основан он на силе принимаемого сигнала (RSSI).
Снимите всенаправленную антенну и оставьте только направленную, типа клевера, хеликса или патча (чем больше коэффициент усиления, тем лучше).
При направлении антенны в сторону коптера RSSI будет максимальным. Если отвернуть от дрона, то сигнал ослабнет. Так что выяснить направление поисков довольно просто.
Вот моя инфорграфика на эту тему 🙂
Этот вариант сработает, только если у коптера все нормально с питанием. Чем ближе вы будете к коптеру, тем сложнее будет определить направление; чтобы упростить задачу, можно уменьшить выходную мощность видеопередатчика через Betaflight OSD (если у вас настроено управление этим самым видеопередатчиком).
У некоторых приемников видеосигнала есть режим поиска (finder mode), в котором появляется более удобный для поиска интерфейс, но принцип поиска остается тем же.
Используя подобную концепцию, вы можете найти коптер при помощи пульта управления.

Будет проще, если пульт отображает RSSI в виде числа, а не только в виде нескольких полосок.
Сигнал будет очень слабым, когда мы целимся антенной в коптер (если, конечно, у вас штыревая антенна, прим. перев). Так что вращайте пультом во все стороны и ищите направление, где самый слабый RSSI, там и будет коптер.
После того, как вы приблизитесь к коптеру, сигнал станет довольно сильным и будет сложно уточнить направление. Просто переведите аппу в режим теста дальности (в таранисе, это страница настроек модели прямо рядом с пунктом bind, есть пункт Range).
И опять же, этот способ сработает, только если у коптера все в порядке с питанием. Если аккумулятор отсоединился, то попробуйте один из следующих методов.
Пищалка с автономным питанием
Такие пищалки будут работать, даже при пропадании основного питания, например, если LiPo аккумулятор коптера «отстрелится» при падении. Ну и до кучи, они заменяют стандартную пищалку в коптере, так что добавляется минимальный вес.
Вот статья со сравнением нескольких популярных вариантов.
Несмотря на то, что некоторые из упомянутых пищалок звучат громче стандартных, всё равно чтобы их услышать, придется подойти к коптеру довольно близко.
JHE42B 110DB Finder Buzzer
Где купить автономную поисковую пищалку
Есть несколько специализированных систем для поиска упавших дронов.
Loc8tor Lite

Позволяет найти дрон в радиусе 120 метров. Работает по радио, поправьте, если я не прав. Купить тут: https://amzn.to/2DkCObL
tBeacon GPS Tracker
Не самый дешевый GPS трекер, который можно поставить на коптер. Информация о нем тут: https://tbeacon.org/?page=10
Уверен, что есть и другие устройства, постараюсь периодически обновлять этот пост. Дайте знать, если я что-то упустил.
Источник
Зуммер на CC3D
Оживил на Фениксе Пищалку. С нова она не работала. Ее даже не подключали при сборке на фабрике. Потому как у данного полетного контроллера не предусмотрен вывод на зуммер (он же Buzzer).
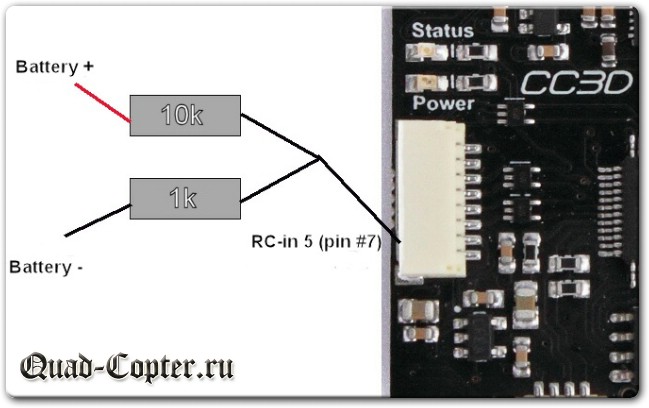
Благо народные умельцы придумали как выйти из этой ситуации. В прошивке Betaflight есть специальная команда которая активирует работу зуммера на 6 канале управления моторами. Но его требуется с коммутировать через дополнительный транзистор (см. схему ниже).

Потребуется любой мелкий транзистор типа PNP (я взял C8050), резистор на 2.2кОм и собственно сам Зуммер. У меня он стоял на светодиодной ленте, но можно купить в радиодеталях. Нужен тот что со встроенным генератором (сам пищит при подаче на него напряжения).
Соответственно подпаиваем все по схеме (распиновку транзистора проверяем если не такой как на схеме, у меня она была другая), в полетном контролере активируем 6 порт мотора на зуммер (команда set enable_buzzer_p6 = ON) и проверяем работу.
Как видите у меня все заработало. Можно еще попробовать активировать контроль напряжения аккумулятора. Вроде не сложная процедура, думаю стоит попробовать. И не надо будет ставить дополнительные устройства.
Спасибо за внимание и Удачных полетов.
Источник
SVA_sar
Автономная пищалка для поиска коптера.
Оценить эту запись
Всем известна ситуация, когда коптер упал в 20 метрах в траву, а найти его не получается, потому, что батарея отключилась и коптер не подает признаков жизни. Если бы батарея была подключена, то работала бы штатная пищалка и, если регуляторы позволяют, пищали бы моторы. Впрочем, избежать таких проблем рецепт известен. Можно оснастить коптер либо автономным маяком с пищалкой, либо автономной пищалкой. На рынке такие штуки присутствуют. В частности Константин Сбитнев (Тигромух) делает великолепные маячки и недавно начал делать пищалку buzzybo. Штука отличная, но вот на мой взгляд функционал этой штуки избыточный. Хочется чего-то совсем простого и совсем дешевого. Тем более, в моем случае, как-то покупать его для установки на «бомжкоптер», который я беру при выездах с семьей на природу, это вообще перебор. Короче жаба победила. Собственно ниже описано то, что получилось у меня из того, что было под рукой. Размещаю по принципу «Вдруг кому понадобится, не выбрасывать же». Никакая коммерция не планируется (как и доработки).
Вот что получилось:
За основу я взял контроллер Attiny13. Очень дешевый (меньше 50 руб). У меня остались б/у от каких-то поделок. Еще нужна активная пищалка, npn транзистор, пара резисторов, диоды (желательно шотки). Ах да, по примеру Тигромуха я поставил туда еще зарядку для LIPO с соответствующей обвязкой. Можно было не ставить конечно. Просто придется заранее заряжать батарейку и следить за ней. Но по-моему MCP73831 не слишком дорого. Тем более «у нас с собой было». Еще я поставил 2 пищалки в параллель (на схеме аж 3 нарисовано, но это чтобы можно было ставить пищалки разного размера). Честно говоря зря. Громкости не добавилось. Похоже одинаковые пищалки глушат друг друга. Нужно все-же разные, с разным тоном.
По скольку речь шла о том чтобы быстро и дешево, то все это делалось на односторонней плате методом ЛУТ. Получилось не очень компактно. Для облегчения текстолит я потом расщепил ножом, сделав его тоньше. В целом вместе с батарейкой 6 грамм (3г плата + 3г батарейка). Батарейка от какого-то MP3 плейера. Даже емкость не знаю. Можно конечно сделать красивую двухстороннюю плату. Заказать изготовление плат в Китае. Получится компактно и красиво. Можно на плату добавить светодиоды для ходовых огней. И так далее и тому подобное. Если у кого-то появится такое желание, я прилагаю архив с чертежами плат и схемами. Желающие могут это допилить под свои фантазии.
Рисунок платы:
Функционал устройства следующий. При наличии внешнего питания 5 вольт, устройство работает как штатная пищалка коптера. Для этого она подключается к выходу «BUZ-» полетного контроллера. Питание рекомендую взять с «BUZ+». При отключении внешнего питания устройство начинает питаться от батарейки и переходит в режим ожидания. При этом подает кратковременные сигналы каждые 10 сек. По истечении 1 минуты, устройство начинает издавать сигналы для поиска. В зависимости от прошивки это может быть SOS азбукой морзе или просто три гудка через паузу полсекунды. Еще в устройстве может быть предусмотрен яркий светодиод (или даже несколько), который будет мигать в такт с сиреной. В режиме пищалки для полетного контроллера, светодиод не включается. Для него понадобится еще один транзистор. В конце я приведу полную схему, где этот светодиод присутствует. Я не разводил с ним плату. Посчитал, что слишком громоздко. Одну минуту я взял из расчета, что этого достаточно для замены ходовой батареи при штатной посадке и недолго при падении куда-нибудь в траву, рядом с пилотом. В случае если не подключать резервную батарею, устройство работает как штатная пищалка.
Источник
Пищим двигателями для быстрого поиска упавшего коптера | RCDetails Blog
Что нужно для сборки квадрокоптера? инструменты
Набор инструментов стандартный, но без него у вас не получится собрать квадрокоптер. И так, вам потребуется следующий инструмент для пошаговой сборки квадрокоптера:
- Паяльник;
- Припой 63/37;
- Флюс активный или нейтральный (я использую ФИМ, активный, но активный флюс надо обязательно хорошо смывать, иначе будет разъедать контакты);
- Пинцет;
- Ключи под шестигранники и головка для гаек;
- Канцелярский нож или любой инструмент для обрезки проводов и снятия изоляции;
- Термоусадка;
- Зажигалка;
- Линейка или рулетка;
- Пластиковые стяжки;
- Фиксатор резьбы синий (можно использовать и красный, но в малых количествах);
- Мультиметр для прозвонки цепи на случай короткого замыкания.
Что еще понадобится именно для этой сборки:
Вступление
Когда вышла эта камера, очень уж захотелось применить ее в обычном мини квадрокоптере, хотя предназначена они для микро дронов. Основной причиной выбора была компактность, качество видео и экономия места, потому что больше не нужно будет навешивать экшен-камеры на дрон и производить лишние манипуляции.
Ну и конечно же, это камера умеет записывать видео, при этом, наверху дрона ничего не будет торчать.
Не забывайте, что пошаговая сборка квадрокоптера это творчество и не обязательно следовать инструкциям и делать так, как показано в статье. Вы можете включить фантазию и сделать иначе или вообще этого не делать. Это хобби, которое должно приносить удовольствие от конструирования, настройки — пользуйтесь этим и не ставьте себе рамки/ограничения.
Fullspeed lucky box 90db
FullSpeed — это самый маленький и легкий поисковый зуммер для квадрокоптеров и самолетов, который поможет найти улетевшую авиа модель. Вес составляет всего 2,3 грамма. Хоть это и не самая громкая пищалка (уровень звука около 90 дБ), но самая маленькая точно — размер 15,5 × 13,5 мм.
Jhe42b 110dbi finder buzzer
Один из самых больших и дешевых поисковых пищалок. На самом деле, это копия Vifly Finder V1.
Jhe42b_s 110dbi finder buzzer
Это уменьшенная версия пищалки Finder JHE42B 110 дБ. Этот поисковый зуммер просто немного меньше, но функции все те же самые. Альтернатива первым 2 пищалкам из этого списка.
Lantian hxz01 110dbi finder buzzer
На этот раз пищалка с монтажной квадратной формой, то есть, его нужно установить в стек с полетным контроллером (у некоторых там еще и регуляторы оборотов), размеры монтажных отверстий: 30×30 мм и 20×20 мм.
Vifly finder 2 super loud, 100db
Vifly Finder 2 — многофункциональная поисковая пищалка с встроенным аккумулятором. Она может работать как стандартный зуммер/пищалка при подключении к BUZ-порту полетного контроллера, так и через выход PWM. А еще можно использовать в моделях, у которых вообще нет полетных контроллеров, но это так, к слову.
Вкладка osd
Для этой сборки настроены такие параметры OSD, но вы можете устанавливать любые:
Вкладка командная строка (cli)
Здесь сохраняем все наши настройки командой DUMP:
Вот и все, ваш квадрокоптер готов к полету!
Вкладка конфигурация
- Протокол для общения Полетный контроллер — регуляторы оборотов: ставим DSHOT600;
- У моторов в сборке 14 магнитов в колоколе. Если вы используете другие двигатели, то считайте;
- Частота обновления гироскопа. Ставим 8kHz;
- Частота обновления ПИДов: ставим 8kHz;
- Включаем акселерометр;
- Максимальный наклон квадрокоптера. Ставим 180, тогда вы сможете заармить дрон почти в любом положении.
Блок «Приемник»: здесь выбираем строчку «Приемник с последовательной передачей данных«. Ниже выбираем «SBUS«, так как приемник у нас работает на этом протоколе.
Блок «Прочий функционал»: включаем строчки, как на скрине. Если планируете подключить адресную светодиодную ленту, то включаем и LED_STRIP. Остальное включается под индивидуальные задачи и сейчас их включать не требуется.
Жмем «Сохранить и перезагрузить«.
Вкладка моторы
Здесь нам нужно проверить направление моторов. Переключаем тумблер 1 и по очереди поднимаем ползунок каждого двигателя, перед этим подключив аккумулятор и обязательно сняв пропеллеры. Если все хорошо и каждый мотор крутится в свою сторону (как показано на схеме выше), то приступаем к калибровке, если нет, то заходим в BLHeli и меняем направление на Reversed.
При использовании протоколов DSHOT, калибровку делать нет необходимости. Но если вы используете, например, Multishot, то калибровка нужна.
- Переключаем тумблер 1;
- Отключаем аккумулятор;
- Поднимаем ползунок 2 на самый верх;
- Подключаем аккумулятор — регуляторы пропищат;
- Резко переводим ползунок в нижнее положение — регуляторы снова пропищат;
- Переподключаем аккумулятор.
Вкладка питание и батарея
Здесь все стандартно — просто настраиваем характеристики ваших аккумуляторов.
Жмем «Сохранить и перезагрузить«.
Вкладка порты
На UART1 ставим Serial RX — это порт для приемника. 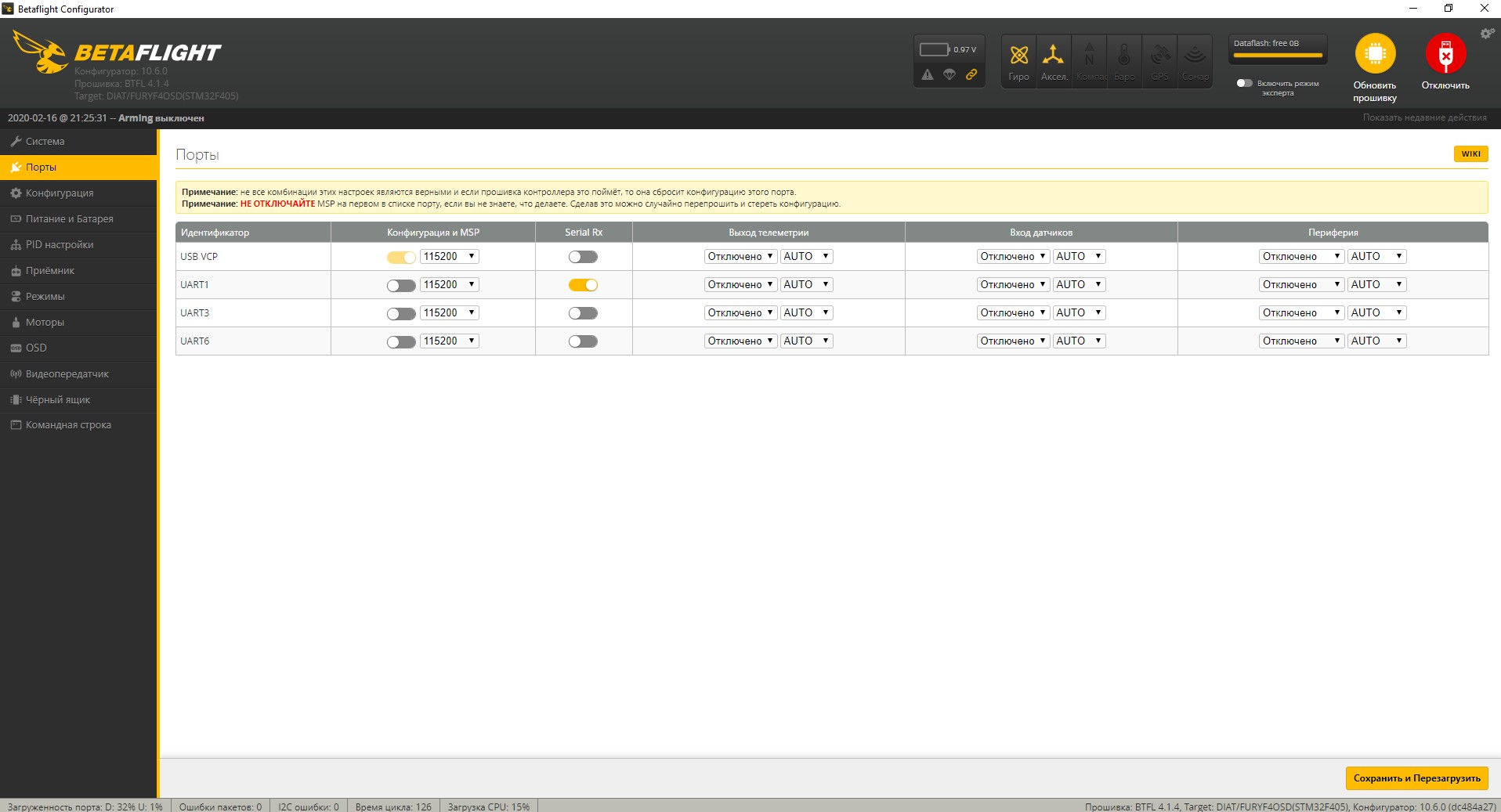
Жмем «Сохранить и перезагрузить«.
Вкладка приемник
Таблица каналов выбирается и прописывается исходя из таблицы каналов вашей аппаратуры. Данный дрон управляется с помощью аппаратуры управления Taranis QX7 и у него по умолчанию таблица TAER1234. Ее можно менять непосредственно в самой аппаратуре.
Для проверки, что все работает: подключаем аккумулятор и аппаратуру управления. Двигаем всеми стиками и тумблерами в разные стороны. Разноцветные полоски должны реагировать на каждое движение элементов пульта.
Если вы используете аппаратуру Taranis, то скорее всего у вас тут не будут реагировать тумблеры. Для этого нужно зайти в меню, дойти до MIXER и назначить каналу тумблер. Подробнее, как это сделать на видео ниже:
После этого, у вас начнет отображаться 5 канал в Betaflight и будет реагировать на переключения.
Вкладка режимы
Здесь настраиваются тумблеры на ваше усмотрение. Например, заармить дрон настроено на тумблер 1, а режимы (стабилизация и АКРО) на 2 тумблер. Таким образом, когда включается тумблер 1, сразу включается режим стабилизации:
Вкладка система
На главном экране калибруем акселерометр:
Выбор пищалки
Существует 2 вида пищалок: активные и пассивные.
Активные пищалки издают звуки пока на них подано постоянное напряжение, в то время как пассивным пищалкам требуется переменное напряжение (звуковой сигнал). Полетные контроллеры обычно имеют 2х контактный разъем с напряжением 5 вольт, как раз для активных пищалок. Активные пищалки — дешевые, легкие и их легко купить онлайн.
Если вы все еще не уверены какой тип нужен, то просто купите активную пищалку.
Вот пара пищалок, они будут работать с большинством полетных контроллеров:
Фирма Matek выпускает разные клёвые пищалки. Например: Loud Buzzer (громкая пищалка) — работает как обычная пищалка, и дополнительно управляется через один из каналов передатчика (PWM сигнал), т.е. можно включать тумблером на аппаратуре управления.
А вот этот LED tail light buzzer (задние фонари с пищалкой) — работает как вышеупомянутый, но дополнительно имеет RGB светодиоды.
Не перепутайте эти пищалки с индикаторами заряда аккумуляторов. Индикаторы заряда имеют пищалку, но их подключают к балансирному разъему аккумуляторов. Вот еще способы контроля напряжения аккумуляторов (англ).
Это индикатор напряжения, а не просто сирена
Для чего используются пищалки на коптерах?
- Для поиска потерянной модели — если коптер упал в траву, то можно сориентироваться по звуку
- Предупреждение о низком заряде аккумулятора
- Статус коптера — писк может помочь выяснить режим, в котором находится коптер, например, если коптер готов к полету — 3 писка, если есть проблемы с приемом сигнала — непрерывный писк и т.д.
Используем возможности протокола dshot в betaflight
В новых версиях Betaflight вы можете включить пищание моторами тумблером с аппы! Это позволит избавится от отдельной пищалки.
Настройки находятся на вкладке Configuration, в разделе DShot Beacon Configuration.
Эти же настройки можно поменять в консоли (CLI).
Значение можно выбрать в интервале от 0 до 5. Нулевое значение отключает пищалку. Значения 1-5 задают разные интервалы и разную тональность писка. Лично я предпочитаю тон номер 3, его легче услышать.
Есть еще два параметра: RX_SET и RX_LOST — если хотите включать пищалку с аппы, активируйте RX_SET. Если нужно пищать моторами при пропадании сигнала — тогда RX_LOST.
Однако, я не рекомендую использовать RX_LOST. Моторы пищат не очень громко, так что если вы находитесь достаточно далеко чтобы приемник потерял сигнал, то и писк не услышите. Есть серьезные шансы сжечь моторы, если они будут пищать несколько минут или даже часов пока вы ищите коптер.
Чтобы включить пищалку с пульта, просто назначьте режим Beeper на тумблер (на вкладке Modes). Пищалка и моторы зазвучат одновременно.
История изменений
- Июнь 2021 — первая версия статьи
- Апрель 2021 — добавлена информация о RX_LOST (я думаю, что эту опцию нужно отключать)
Как выбрать пищалку для квадрокоптера
Пищалки бывает двух типов — пассивные и активные.
Активные зуммеры начинают пищать после того, как на них подают постоянный ток, такие можно сразу припаять к полетному контроллеру и он будет работать. Пассивным для работы нужен генератор AC, обычно они идут в комплекте. Полетные контроллеры поддерживают 2-х контактные активные пищалки на 5 вольт. Активные — дешевые, легкие и продаются в любом магазине радиоэлектроники.
Если вы еще не определились, какую пищалку купить, то покупайте активные на 5 вольт.
Как использовать пищалку в квадрокоптере
Большинство полетных контроллеров имеют специальные контакты под названием «buzzer», вот к этим двум контактам и припаивается пищалка:
Монтаж caddx tarsier 4k в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:
Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:
Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.
Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:
Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:
Крепим верхнюю панель к раме:
Монтаж приемника
Приемник используется FrSky XM .
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: 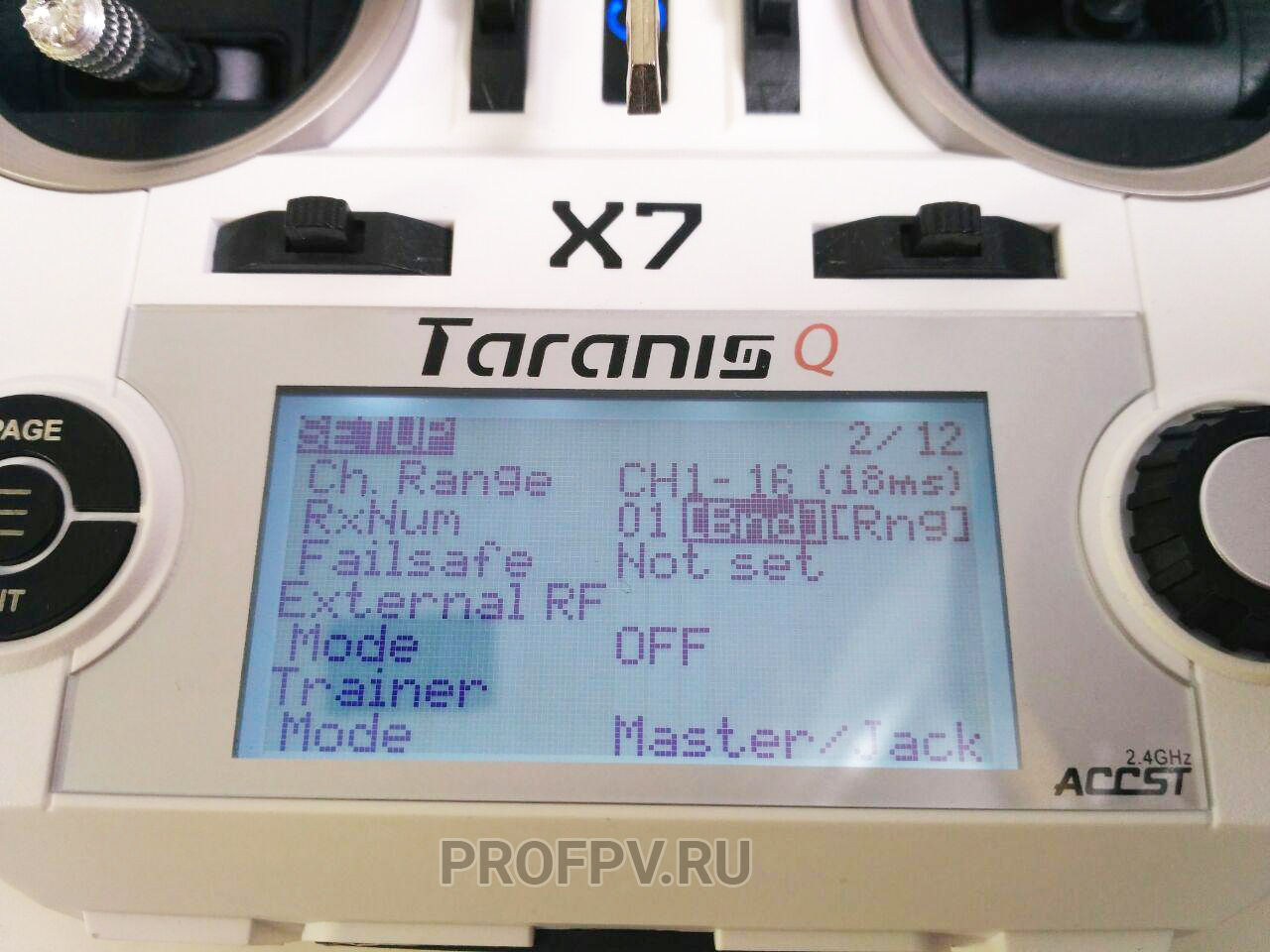
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:
Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:
Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Монтаж проводов для камеры
Далее припаиваем провода от камеры. Согласно схемы, мы можем припаять контакты к этим площадкам:
- желтый провод — видео;
- черный — земля;
- красный — 5 V.
Отходящий проводок (зеленый черный) это контакт для подключения джойстика управления камерой. Но Caddx Tarsier 4K настраивает с телефона через приложение, поэтому, если хотите, можете отрезать лишние провода.
Пищалка (buzzer, зуммер) для квадрокоптера
Пищалка на квадрокоптере — очень важный элемент в конструкции любых квадрокоптеров, в частности, мини и гоночных квадркоптеров. Баззер, он же пищалка и он же зуммер, сигнализирует о различных собитытиях, происходящих в программной части дрона, начиная от ошибок и заканчивая сигналом разряда аккумулятора.
Пищалки для квадрокоптеров
Пищалка в квадрокоптере — это одна из основных комплектующих, тем не менее, новички могут запутаться в их видах и целях, которым они служат. Надеюсь эта статья поможет прояснить кое-какие вещи.
Не забудьте прочитать наши советы и хитрости по сборке коптеров. Заглавная картинка сделана Фрэнком Ангером (Frank Unger).
Подключаем пищалку к коптеру
Большинство полетных контроллеров имеют специальный разъем для подключения пищалки, обычно он обозначен как B и B- или похожим образом. Например:
Пример подключения активной пищалки к полетному контроллеру
Подключение моторов квадрокоптера: установка двигателей
Второй этап пошаговой сборки квадрокоптера. Раньше было популярно производить двигатели с правой и левой резьбой, чтобы в процессе полета гайки всегда самозатягивались, но в последнее время все чаще производители продают двигатели с резьбой на валу только в одну сторону.
Поэтому, просто покупайте сразу по 4 штуки двигателей без привязки к стороне, в которую они должны крутиться, это мы потом поправим при настройке прошивки.
Чтобы все смотрелось красиво, можно использовать оплетку жгутов или шнуров, например, вот так:
А можно использовать просто термоусадку. Будет менее красивее, но защита такая же.
В комплекте с двигателями будут идти 2 размера винтов, для толстой рамы и для тонкой рамы. Так как у этой рамы лучи толщиной 5 мм, то используйте самые длинные винты. До оплетки двигателя они не достанут.
Теперь вам потребуется фиксатор резьбы. Продается в любом магазине автозапчастей. Использовать желательно синий, но если остался красный, то просто лейте его в очень малых количествах на резьбовые соединения. Выглядит он так:
Смажьте винты и прикрутите двигатели к раме. Будьте аккуратны и не сорвите резьбу.
После того, как прикрутите двигатели, отмерьте длину проводов, которую нужно будет оставить для припаивания. Отмерять нужно на напрямую, а с учетом изгибов. Вот так:
Провода припаиваются также, как идут от двигателя — по порядку, хотя и можно нарушить порядок и поменять крайние провода местами, тогда двигатель начнет крутиться в другую сторону. А вот средний провод перепутать нельзя, он должен быть обязательно по центру и припаян к средней площадке.
После того, как отмерите, отрежьте лишнее, удалите изоляцию с концов, залудите. Отмерьте и отрежьте кусок термоусадки, либо оплетки и наденьте на провода:
Теперь все это дело нужно припаять. Прогревать надо хорошо, чтобы получился качественный контакт, иначе у вас могут возникнуть проблемы в виде того, что при запуске двигатели будут отключаться (как один из вариантов):
Затем проходим по термоусадке зажигалкой или феном для пайки, чтобы она стянулась.
Поисковая пищалка своими руками
Последние штрихи
Аккумулятор в этой сборке квадрокоптера будет крепиться сверху. Так как там шляпки винтов, то нам необходимо сгладить эту поверхность. Для этих целей был выбран кусок резины (камера от велосипеда) и 2 полоски двустороннего скотча:
В сборке FPV квадрокоптера можно применить любой материал, помните, этот квадрокоптер собираете вы сами и так, как вы хотите, поэтому используйте фантазию, не обязательно следовать тому, как показано здесь.
Итоговый вид квадрокоптера:
На этом с технической частью закончено и пора переходить к программной: прошивка и настройка!
Пошаговая сборка квадрокоптера своими руками на mamba f405 с fpv камерой caddx tarsier 4k
Все началось с того, что нам очень понравилась FPV камера Caddx Tarsier 4K из-за принципа 2 в 1, так как не надо будет лепить экшен-камеры на раму квадрокоптера. Поэтому, было решено собрать квадрокоптер вместе с этой камерой, хоть она и предназначена для микро-квадрокоптеров.
Далее в статье мы объясним, каким образом была закреплена плата и сама камера в раме. Пошаговая сборка квадрокоптера своими руками под силу любому, кому интересна эта тема, в статье все рассказываем максимально подробно.
Принцип работы
Пищалка Vifly Finder 2 умеет определять, есть ли питание от основного аккумулятора и принимает ли сигнал приемник дрона. Если ни первого, ни второго нет — активируется наша пищалка, которая может работать до 30 часов в активном режиме!
Кроме того, на плате есть датчик освещенности и Vifly Finder 2 умеет подстраивать яркость светодиода в соответствии с общей освещенностью. Еще эта пищалка умеет определять ночь и если она наступила, то переходит в спящий режим для экономии заряда.
Прошиваем полетный контроллер в betaflight configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
После того, как скачалась прошивка, жмем « Загрузить прошивку «: 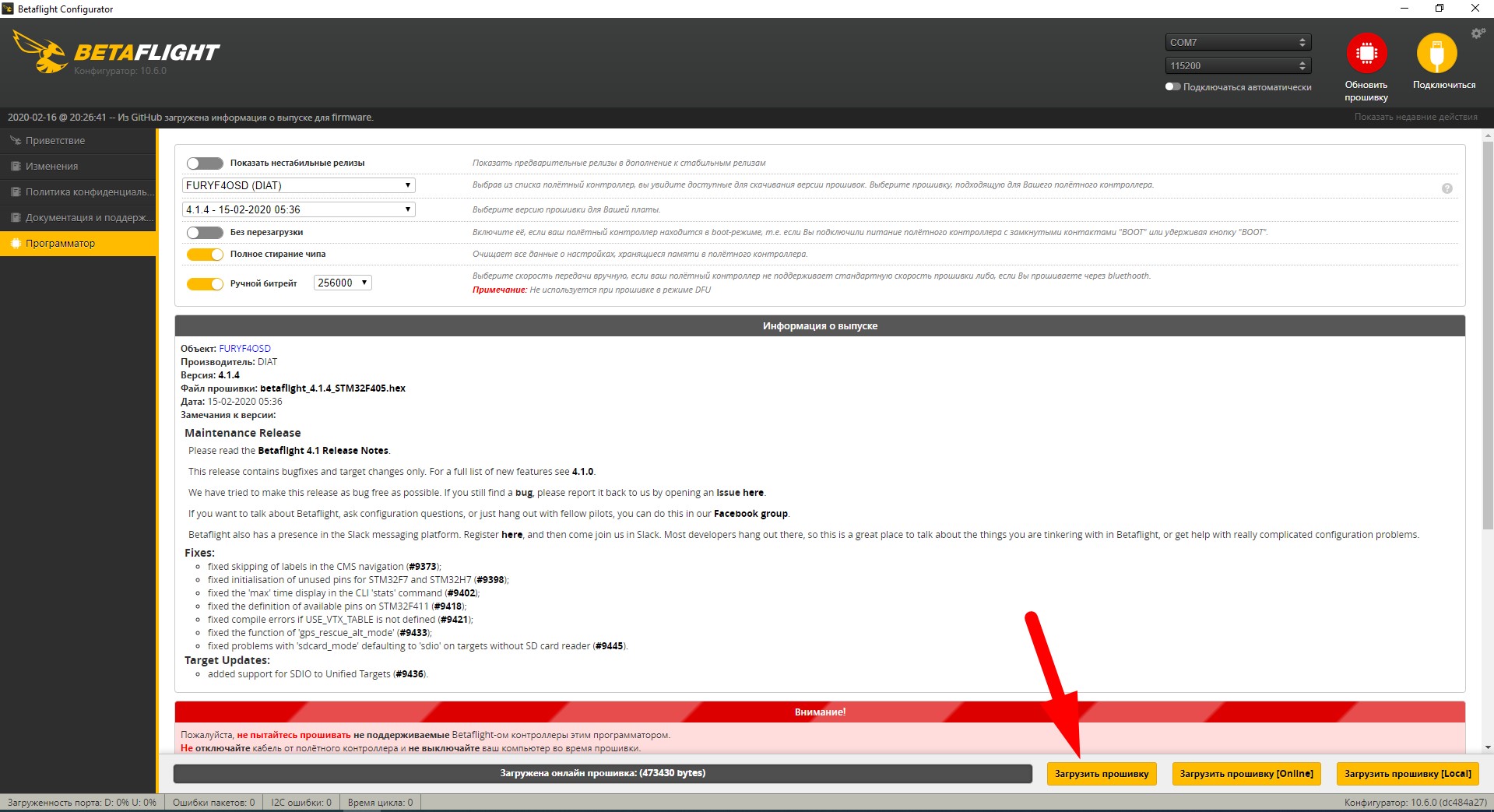
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
Прошивка и настройка квадрокоптера после сборки своими руками
После сборки квадрокоптера, переходим к настройке и прошивке квадрокоптера. Вам понадобится:
- Betaflight Configurator;
- BLHeliSuite;
- Кабель USB — microUSB.
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
Если Reversed, то мотор будет крутиться в обратную сторону.
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Здесь все гораздо проще и интуитивно понятно.
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X: 
Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами
Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:
Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Схема монтажа
Подключать все компоненты будет согласно этой схемы:
Таблица компонентов и примерная цена
Дешевле и проще заказать компоненты на Banggood. Все пришло быстро и в срок, без брака.
| Компонент | Название | Ссылка | Цена |
Racerstar 2306 BR2306S Fire Edition 2400KV
Можете покупать любые двигатели для 4S аккумуляторов, либо для 6S, если хотите использовать 6S аккумуляторы (железо поддерживает и 6S).
HQProp 5045
Можно купить любые другие с маркировкой 5045.
Foxeer 5.8G Lollipop (RP-SMA Male)
Eachine TS5828L (можно использовать любой другой)
Альтернатива, с антенной SMA на Banggood и/или RP-SMA на Ali:
Banggood | Aliexpress
Ссылка на 3D-модель: ТЫК
Технические характеристики
Надеемся, вы нашли ответ на вопрос — как найти квадрокоптер? Ведь что может быть хуже, чем улетевший дрон после первого запуска?
Не стоит недооценивать поисковые пищалки, даже если вы опытный пилот и летаете давно — инцидент может произойти с каждым и вы скажете себе спасибо, что купили и поставили такую пищалку на аккумуляторе.
Например, может быть такая ситуация, что дрон упал в кусты или густую траву, вы примерно видели куда он упал, но аккумулятор отцепился или повредились провода и штатная пищалка не пищит — вот тут то и поможет пищалка из статьи, которая работает на своем аккумуляторе и поможет отыскать улетевший квадрокоптер.
Установка видеопередатчика и пищалки
Сборка FPV квадрокоптера не обойдется без видео. Видеопередатчик используется классический: Echine TX528 и мы подключаем его к полетному контроллеру. Если провода у видеопередатчика длинные, то укорачиваем их до той длины, чтобы можно было прикрепить видеопередатчик к краю верхней планки рамы и провода не висели. Чтобы минимизировать помехи в видео, провода скручиваем в жгут. По схеме, мы можем припаиваться к этим контактам:
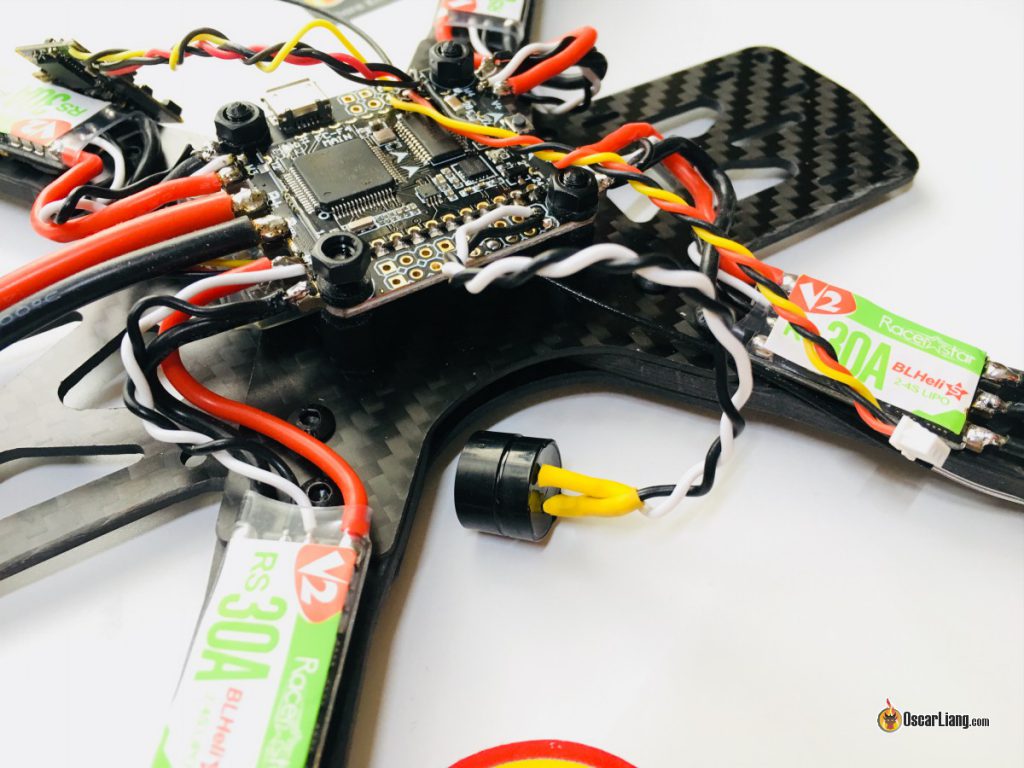
Пищалку припаиваем рядом с контактами на камеру. Пищалка нужна для звукового сопровождения различных уведомлений, а также для поиска упавшего квадрокоптера. В общем, это необходимая вещь. Пищалки нужны с встроенным генератором. Провода (черный и красный) припаиваем сюда:
Провода пищалки также просовываем под полетным контроллером. На выходе с задней стороны, привязываем пищалку и кабель питания пластиковой стяжкой к раме.
Видеопередатчик крепим пластиковыми стяжками к верхней панели, попутно прикрутив антенну:
Установка полетного контроллера
Пошаговая сборка квадрокоптера включает в себя установку полетного контроллера. Вам нужно припаять провода и конденсатор для подключения аккумулятора. Забыл сфотографировать этот момент, поэтому фото уже после нескольких шагов. Соблюдайте полярность.
В комплекте с Mamba F405 шли короткие провода, поэтому пришлось наращивать дополнительные, чтобы хватало удобно подключать аккумулятор. Изначально припаял короткие, подумав, что будет удобно подключать, но после сборки понял, что не совсем и быстренько переделал их.
Делайте так, чтобы провод выходил за раму на несколько сантиматеров. Места контактов тоже оборачиваем в термоусадку. На конденсаторе есть « » и «-«, это все хорошо припаиваем к плате с регуляторами оборотов. Контакт должен быть хороший, поэтому, дайте припою прогреться:
Далее устанавливаем на пластиковые стойки полетный контроллер. В комплекте идут синие демпферные амортизаторы. Они нужны, чтобы гасить вибрации и колебания, чтобы не мешать работе гироскопу. Наверх насаживаем пластиковые гайки и затягиваем, но не сильно туго.
Функции
- Vifly Finder 2 будет пищать, даже если отключен основной источник питания (аккумулятор квадрокоптера);
- Встроенный датчик освещенности для светодиодного маячка;
- Автоматический спящий режим в ночное время для экономии заряда аккумулятора;
- Очень громкий звук в сравнении с обычными пищалками. Такая громкость звука нужна в случаях, когда квадрокоптер улетел далеко.
Есть 2 варианта отключения пищалки:
- Выключить встроенной кнопкой — удерживайте ее в течение 3-5 секунд.
- Выключение с помощью основного аккумулятора дрона — подсоедините аккумулятор на 3-6 секунд, затем снова отключите.
Эта пищалка совместима со всеми квадрокоптерами и самолетами. Никаких дополнительных настроек делать не надо, она сама определит подключение к питанию, полетному контроллеру, определит сигнал приемника и будет работать как положено.
Электроника квадрокоптера и другие компоненты
Инструменты перечислили, теперь нужно перечислить и компоненты, из которых собирается квадрокоптер:
- Рама;
- FPV камера (в нашем случае, а это Caddx Tarsier);
- Полетный контроллер с регуляторами оборотов 4 в 1 (там же и плата распределения питания);
- Видеопередатчик;
- Приемник;
- Аккумулятор;
- Антенна для видеопередатчика;
- Крепления для аккумулятора.
Все ссылки на компоненты вы найдете в конце статьи в виде таблицы.
Заключение
Такой квадрокоптер получился по итогу сборки. К нему планируется прикрутить еще и GPS для включения функции Возврат домой — такая функция появилась в последней версии Betaflight (Filesafe). Главной целью сборки было, конечно же, прикрутить FPV камеру Caddx Tarsier 4K, ради которой все и затевалось.
Видео с полетов будет позже.
Если у вас остались вопросы по сборке fpv квадрокоптера: задавайте, с радостью ответим!
Если вы нашли ошибку или ссылку, которая не работает, пожалуйста, выделите фрагмент текста и нажмите Ctrl Enter.
Источник



