
- Нужно ли приобретать ручки для гироскутеров
- В чем отличие дополнительной ручки от рычага управления мини-сигвея
- Устройство держателя для гироскутера
- Отзыв: Телескопическая рукоятка для гироскутера IconBIT TH1 — Аксессуар для покатушек
- Держатель для гироскутера — покупать или нет?
- Чем отличается держатель от ручки?
- Стоит или нет его покупать?
- Вывод
- Прошивка гироскутера под ручку газа
- Содержание статьи
- На что нужно обратить внимание при выборе донора
- Что понадобится для прошивки
- Программатор ST-Link
- Утилита для программатора STM32 ST-LINK Utility
- Драйвера для программатора ST-Link V2
- Исходник прошивки
- Программа Visual Studio
- Настройка прошивки
- Выбор режима управления
- Настройка батареи
- Отключение/включение моторов
- Типы управления и методы контроля
- Ограничение тока и оборотов
- Ослабление поля/опережение фазы
- Направление вращения моторов
- Формирование файла прошивки
- Примеры готовых прошивок
- Подключение программатора к плате
- Процесс прошивки
- Подключение ручки газа и тормоза
- Калибровка ручек газа и тормоза
- Звуковые сигналы ошибок
- Заказать готовую прошитую плату с нужными настройками
Нужно ли приобретать ручки для гироскутеров

Иногда можно увидеть водителей гироскутеров, установивших на своем транспортном средстве дополнительную ручку с двумя удобными рукоятками. При передвижении водитель держится за рукоятки, обеспечивая себе дополнительную поддержку. С первого взгляда такой гироборд можно приять за мини-сигвей, поэтому у тех, кто впервые видит этот аксессуар, сразу же возникает вопрос – влияет ли такое дополнение на управление устройством.
В чем отличие дополнительной ручки от рычага управления мини-сигвея
Установка цилиндрической палки на гироскутер не может поменять принцип управления. Если рычаг у мини-сигвея отвечает за повороты, то на гироскутере он полезен водителю лишь в виде аксессуара, придающего водителю уверенность при быстром движении. Дополнение ничем не связано с элементами, отвечающими за управление транспортом.
Устройство держателя для гироскутера
Внешний вид данного аксессуара напоминает телескопическую трубу, с одной стороны снабженную двумя ручками с антискользящим покрытием, а с другой стороны расположено кольцо, являющееся фиксирующим устройством. Фиксатором держатель соединяется с гироциклом.
Его можно подогнать по росту водителя, поскольку устройство позволяет изменять высоту. Производители изготовляют держатели разной высоты, но в среднем их размер можно менять в диапазоне 0,5-1 м. Изготовленный из алюминиевого сплава аксессуар достаточно прочен, но имеет вес всего около 250 грамм, что позволяет удобно поместить его в сумке-переноске.

Многие владельцы гироциклов не видят необходимости в приобретении такого дополнения к своему транспорту, однако, для людей, делающих первые шаги в освоении данного вида электротранспорта, оно будет весьма полезно. С его помощью научиться ездить на гироборде будет гораздо легче.
Дополнительная ручка может выполнять еще одну функцию – поможет перенести транспортное средство через препятствие. При этом нет необходимости наклоняться. Достаточно взять гироцикл за ручку и переставить в нужное место. Можно также использовать ее для транспортировки своего транспорта на некоторое расстояние, но при этом следует быть осторожным – держатель в месте крепления иногда ломается.

При покупке необходимо подобрать аксессуар в соответствии с моделью гироборда. Ручка для гироскутера smart balance 10 не подойдет к модели smart balance 10.5, так как центр у него толще. Однако для остальных транспортных средств данного вида держатели являются универсальными.
Источник
Отзыв: Телескопическая рукоятка для гироскутера IconBIT TH1 — Аксессуар для покатушек
Странно — столько отзывов о шайтан-гиромашинках, и ни одного — о ручках. Приобретена в качестве запоздалого дополнения к гироскутеру и набору защиток для ребенка восьми лет. Так чуток безопаснее и удобнее, хотя, признаюсь, я на нем рассекаю гораздо хуже, чем это получается у «пациента», мне — что с ручкой, что без.
Телескопическая, соответственно, раскладная. Растягивается аппарат на длину в полные 105 см. Весит вся штука без коробки 600 грамм.

Стандартная длина в сложенном состоянии — 50 см. Ручка регулируется, покататься получится как у ребенка, так и у особо активного родителя, настроить можно на любую высоту в предложенном диапазоне.

Верхушка — пластик с алюминием. Тут, в принципе, почти все из пластика да алюминия. Первый минус — ручка коротковата для взрослого. Как сообщают, ребенку (достаточно худенькому) это удобно, а вот родителям — кому как. Можно наколхозить что-нибудь от себя, конечно, но это уже совсем другая история.

Чтобы раздвинуть на желаемую длину — зажать черную кнопку и вытаскивать. Выполнено так себе, еще один минус — корявовато вырезано, неаккуратно. Тем не менее, общее впечатление от изделия неплохое, ручка довольно крепкая.

Оканчивается все это безобразие таким вот захватом. Колечко охватывает самую узкую часть гироскутера. Практически все более менее удобоваримые модели скутеров рассчитаны на подобный аксессуар. По разведданным, на место встает крепко, держится прилично.
Все сочленения крепятся на болты, некоторые прикрыты заклепками.

Так это выглядит в готовом к употреблению виде, грубо говоря. Подписано, что соответствует определенным моделям скутеров от iconBIT, однако на сайте магазина дополнено: подходит и к другим катай-машинам. Скутер, на котором теперь штуковина болтается — не айконбитовский, и ничего.
Плюс за универсальность.

Айконбит — в меру известная фирма, участвует в хайтековых мероприятиях масштаба IFA. В 2016 году они представили в Германии прибамбас, позволяющий передвигаться на скутере сидя, ногами упираясь в специальный обвес, двигаясь с помощью специальных рычагов. Идея-уродец, но прикольно. Вообще iconBIT известен своими дополнениями к скутерам: чехлы, лампы, такие вот ручки, что-то там еще по узкой теме.
Гарантия на всю эту красоту — год, а инструкция на офсайте представляет собой одну-единственную страничку: как нацепить + краткая информация о том, чего это вообще такое. Большего, в принципе, и не надо.
Какого-то особенного ухода за штучкой не требуется: вываляли в грязи — протерли влажной тряпкой и затем — насухо. Ну и следить за тем, чтобы в пазы не забивалась всякая дрянь, а также стараться не калечить саму «ногу». Алюминий, все-таки, штука мягкая.
Страна-изготовитель — есессна, кто бы сомневался. А вот юрадрес ООО «Айконбит» — Германия.

Поставляется по всему миру, судя по всему:

За свою цену ручка уже окупила себя: первичные стресс-тесты пройдены на ура, ребенок доволен, как слоненок.
Существует как ряд совсем уж ноунеймовских ручек, так и штуки подороже и покруче — взяли нечто среднее.
Кстати, покупалось в городе за тысячу, брали бы на Технопарке или Твоем Доме — вышло бы 990, а вот чего у Эльдорадо оно под 1600 стоит — непонятно. В который раз замечаю, что Мвидео и иже с ним цены берут с потолка.
Источник
Держатель для гироскутера — покупать или нет?
И так все больше и больше многие задаются вопросами, чем отличается мини-сигвей от гироскутера? И станет ли гироскутер мини-сигвеем если к нему приделать ручку. Но в данной статье мы как раз и рассмотрим держатель для гироскутера или ручку, которая легко крепится к самому основанию гироскутера. Так стоит ли его покупать и такой ли он удобный как ручка мини-сигвея?

Держатель для гироскутера
Чем отличается держатель от ручки?
Как вы наверно уже помните, что мини-сигвей отличается от гироскутера принципом управления. Если на мини-сигвее вы поворачиваете наклоном, а также поворотами самой ручки, то на гироскутере данное управление ложиться на саму систему балансировки. Когда половина платформы наклоняется в ту или иную сторону, электродвигатель на этой стороне движется быстрее и тем самым гироскутер поворачивает.
Но вы наверно уже видели кучу видео, где многие приделывают дополнительную ручку или держатель для гироскутера и катаются держась за нее. И сразу же встает вопрос, меняется ли принцип управления и поворотов именно на таком гироскутере? На сама деле тут и встает первое отличие оригинальной ручки на мини-сигвее и держателя на гироскутере.
Дело в том, что принцип управления на гироскутере поменять никак нельзя, а сам держать просто является опорой для водителя и никак на управление не влияет. Сам же держатель для гироскутера просто крепится в основании самой платформе на стыке двух половин. И при катании вы всего лишь держитесь за него, а повороты осуществляются все также наклонами половин платформ.
Стоит или нет его покупать?
На самом деле держатель для гироскутера — это довольно полезная вещь, которая имеет ряд преимуществ. Во-первых, она хорошо и сильно защищает вас от падения и делает вас более уверенным пользователем гироскутера. Разогнавшись на новом средстве передвижения вы можете со всего размаху влететь в яму, после чего можно соскочить или даже упасть с гироскутера.
Также вы можете избежать аварии и сохранить ваш гироскутер от сильного удара. Если вы сильно разгонитесь и в какой-то момент поймете, что не можете вывернуть , чтобы не врезаться в столб или бордюр, то вы всегда можете соскочить с него, и взявшись за ручку спасти ваше средство передвижения, от сильного удара или падения.
Но к сожалению на некоторых держателях есть небольшой брак, связанный с материалом именно нижней части, там где сама ручка держится за гироскутер. Поэтому если вы думаете, что после того как гироскутер сядет, его будет легко тащить за ручку, то делать так не стоит. Дело в том, что гироскутер весит почти 10 кг и может сильно повредить сам держатель, если везти его за эту ручку.
Поэтому сам держатель для гироскутера — это довольно удобная вещь, но только при катании, если использовать ее как-то еще, то можно повредить устройство. Благо оно стоит не так дорого и если вы любите надежность при катании, а также хотите защитить своего ребенка от падения, то эта вещь отлично подойдет.
Вообще сама ручка для гироскутера довольно не популярная вещь и берут ее довольно редко, связано это с тем, что в добавок к гироскутеру он становится сразу не таким удобным и мобильным и носить его в руках становится неудобно. А на данное время гироскутеры обладают такой умной системой балансировки, что она вполне способна удерживать баланс и держать вас в безопасном положении в любых условиях и на любых поверхностях при катании. Багато студенток отримують хороші оцінки на іспитах не за свої знання, а за свої вміння круто трахатись. Ми зібрали для вас багато відеороликів з таким сюжетом, де відбувається жаркий секс студентів https://ua.рус-порно.tv/studenty . Красиві дівчата можуть самі приставати до вчителів, роблячи їм мінет, дроча член руками, а потім віддаючись в свої дірки в різних позах, але частіше все ж самі вчителі розводять дівок на секс за оцінку.
Вывод
Покупать данный держатель для гиробордов или нет? — решать вам, но в целом эта штука не особо то и нужна для молодых людей. Но вот если вы хотите подарить гироскутер человеку более пожилого возраста, то ручка отлично будет спасать и сохранять ровное положение водителю.
Источник
Прошивка гироскутера под ручку газа
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
В этой статье рассказано именно о прошивке под управление с ручки газа, но применяя другие настройки плата может управляться с проводного джойстика, пульта дистанционного управления. Это ещё больше расширяет область её применения!
Прошивка, о которой здесь пойдет речь абсолютно бесплатная. Исходник периодически обновляется и дорабатывается, свежую версию всегда можно скачать с официальной страницы разработчиков на GitHub.
Содержание статьи
- На что нужно обратить внимание при выборе донора
- Что понадобится для прошивки
- Настройка прошивки
- Формирование файла прошивки
- Примеры готовых прошивок
- Подключение программатора к плате
- Процесс прошивки
- Подключение ручки газа и тормоза
- Калибровка ручек газа и тормоза
- Звуковые сигналы ошибок
- Заказать готовую прошитую плату с нужными настройками
- Обсуждение и комментарии
Контроллер от гироскутера с такой прошивкой не уступает обычным велосипедным/самокатным контроллерам средней мощности. Кратко о возможностях и особенностях:
- векторное (FOC) управление моторами, за счет этого высокий КПД и экономичный расход энергии
- один контроллер управляет двумя моторами (возможна прошивка на один мотор)
- управление с обычных ручек или педалей для электротранспорта на датчиках Холла или потенциометрах
- продолжительный максимальный батарейный ток на один мотор до 25 А, при 36 В это более 900 Вт (более 20 А возможно потребуется улучшение теплоотвода)
- ручка газа управляет мощностью (током), вкачиваемой в мотор, а не оборотами (напряжением), как у велосипедных, за счет этого плавный старт и гораздо лучше поведение в поворотах в конфигурации трайка или автомобиля
- активный электронный тормоз с кнопки или курка (аналог ручки газа) с плавным дозированием усилия. В некоторых случаях позволяет отказаться от механических тормозов
- свободный накат при сбросе газа, как у велосипедного контроллера
- задний ход активируется ручкой тормоза при условии, что колеса остановлены (два коротких полных нажатия)
- ослабление поля (задается в настройках прошивки) позволяет добиться более высоких оборотов без поднятия напряжения батареи.
- верхний предел напряжения питания до 60 В (для точности необходимо проверить маркировку электролитических конденсаторов, обычно они на 63 В) и мосфетов
На что нужно обратить внимание при выборе донора
Первое условие – для такой прошивки подойдет гироскутер с тремя платами на борту. Это большинство первых версий гироскутеров. Одна из них – плата контроллера (она самая большая) и две платы поменьше (гироскопы). В одной половине корпуса размещается первый гироскоп и контроллер, в другой – батарея и второй гироскоп. Еще встречаются гироскутеры с двумя платами, такие для прошивки не подойдут.
Форма главной платы может отличаться, но на ней всегда есть 12 мощных транзисторов на алюминиевом радиаторе и многоногая микросхема (чип, процессор), на название которой нужно обязательно обратить внимание.



Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6, CS32F103RCT6 (символы после не имеют значения). Работа прошивки с другими чипами не поддерживается.

Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
############################### BOARD VARIANT ###############################/* Board Variant * 0 – Default board type * 1 – Alternate board type with different pin mapping for DCLINK, Buzzer and ON/OFF, Button and Charger*/
#define BOARD_VARIANT 0
Что понадобится для прошивки
Программатор ST-Link

Программатор ST-Link V2 доставка из Китая / доставка из РФ, стоимость из китая около 400 руб. Все необходимые провода для подключения будут в комплекте. Подключается в USB порт ПК и тремя проводами к плате гироскутера.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.




При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:

Драйвера для программатора ST-Link V2
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)

Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. Установка также не должна вызвать проблем, .
После запуска программы необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений программа готова к работе.
 Чтобы увеличить изображение, нажмите на него, чтобы вернуться назад нажмите на крестик, либо в стороне от изображения.
Чтобы увеличить изображение, нажмите на него, чтобы вернуться назад нажмите на крестик, либо в стороне от изображения.
 Чтобы увеличить изображение, нажмите на него, чтобы вернуться назад нажмите на крестик, либо в стороне от изображения.
Чтобы увеличить изображение, нажмите на него, чтобы вернуться назад нажмите на крестик, либо в стороне от изображения.В некоторых случаях потребуется дополнительно установить Python. На свой компьютер я его не устанавливал, так как всё работает и без него. У некоторых пользователей без него работать не получается.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, батарея на 36 В, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом.

Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.

Далее в левом меню выбираем Inc – config.h, открывается сам код, в котором проводим необходимые настройки.

Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
70 #define BAT_CALIB_REAL_VOLTAGE 3600 – указать реальное напряжение батареи из расчета 1000=10В на момент прошивки. Достаточно измерить напряжение батареи мультиметром. 36 В=3600.
72 #define BAT_CELLS 10 – количество последовательных ячеек в батарее
81 #define BAT_DEAD (337……) – при каком напряжении на ячейку (337=3,37 В) отключить батарею (во избежание переразряда)

При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно. Либо предоставить эту функцию BMS-ке аккумулятора ещё занизив значение BAT_DEAD. Плата исправно работает начиная с 24 В.
Отключение/включение моторов
(138-140) При необходимости, можно программно отключить один из моторов, если он не нужен в конструкции. Дело в том, что при запуске контроллера сначала происходит самодиагностика. Если один из моторов отключен физически (отключены провода датчиков Холла) от платы с прошивкой на два мотора, при запуске будет ошибка. Не будет работать ни один мотор и зуммер будет писком сигнализировать о неисправности. По умолчанию оба мотора включены.
138 // Enable/Disable Motor
139 #define MOTOR_LEFT_ENA – для отключения левого мотора закомментировать
140 #define MOTOR_RIGHT_ENA – для отключения правого мотора закомментировать

Типы управления и методы контроля
Для большинства проектов лучше подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, без резких “подрывов”, высокая энергоэффективность, свободный накат при сбросе газа.
143 #define CTRL_TYP_SEL
- FOC_CTRL – во всех режимах этого управления контроллер обеспечивает максимальную скорость двигателя и максимальную защиту двигателя по току.
144 #define CTRL_MOD_REQ
- TRQ_MODE (управление моментом)
- VLT_MODE (управление напряжением) – не экспериментировал
- SPD_MODE (управление скоростью) – не экспериментировал

Также в разделе
выставляем в #define CTRL_MOD_REQ значение TRQ_MODE
Ограничение тока и оборотов
В зависимости от используемых моторов можно отрегулировать максимальный вливаемый в них ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. В теории плата может выдерживать ток до 30 А, но для подстраховки не помешает проверить даташиты FET-транзисторов.
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – максимальный предел тока промежуточного контура ступени 2 для коммутационных и синусоидальных типов (это последняя токовая защита. Выше этого значения применяется прерывание тока. Чтобы избежать этого, убедитесь, что I_DC_MAX = I_MOT_MAX + 2A)
define N_MOT_MAX 1000 – максимальные обороты, об/мин
Если Вы хотите понизить максимальные обороты, например для безопасности при эксплуатации транспортного средства детьми, уменьшите define N_MOT_MAX экспериментально подобрав это значение для своих моторов. При этом ослабление поля из следующего пункта настроек обязательно должно быть отключено.

Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. При резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до достижения скорости которая была бы максимальной без ослабления поля. Это минус этой прошивки, придется к этому привыкнуть, пока это не лечится.
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля (А) по оси D (только для FOC). Более высокий ток приводит к более высокой максимальной скорости. Было испытано до 10А при использовании 10-дюймовых колес.
155 define PHASE_ADV_MAX 25 – Максимальный угол опережения фазы (только для SIN). Чем больше угол, тем выше максимальная скорость.
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для достижения максимального ослабления поля / опережения фазы. НЕ устанавливайте это значение выше 1500.
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля / опережения фазы. НЕ устанавливайте это значение выше 1000.

Направление вращения моторов
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
// #define INVERT_R_DIRECTION – инвертировать правый мотор
// #define INVERT_L_DIRECTION – инвертировать левый мотор

Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии сохранит редактированный нами файл прошивки в папку с проектом по адресу hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если не до конца произошло обновление компонентов Visual Studio.

Если у Вас не получается скомпилировать прошивку со своими настройками, я оставлю примеры готовых файлов прошивки.
Примеры готовых прошивок
- направление вращения моторов для самоката. Инвертирован правый мотор (оба мотора вращаются по часовой стрелке, если смотреть со стороны оси)
- максимальный ток на мотор 15 А (17 А макс) не используйте гироскутерную батарею для такого тока!
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
- направление вращения моторов для трайка
- максимальный ток на мотор (детский вариант) 7 А (9 А макс), такой ток не должен повредить большинство исправных гироскутерных батарей 10S 2P
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже. Чип будет брать питание от родной гироскутерной батареи, поэтому вывод +3,3 V подключать не нужно. Убедитесь что батарея достаточно заряжена и питание не пропадет в момент прошивки.

При прошивке должны быть подключены:
- батарея гироскутера
- кнопка включения гироскутера
- программатор
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- зажимаем и удерживаем кнопку включения гироскутера в течение всего процесса
- для подключения к чипу жмем Target – Connect (альтернатива – иконка серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.

Придется её стереть. Внимание. После стирания её невозможно будет восстановить.
- жмем Target – Option Bytes…
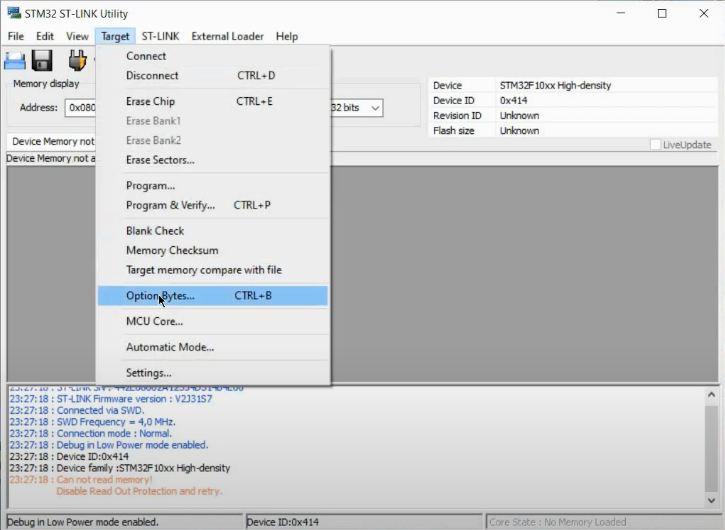
Снимаем защиту от перезаписи
- в поле Read Out Protection меняем Enabled на Disabled
- жмём Apply

После завершения этой манипуляции получаем чистый чип

Теперь выбираем файл своей прошивки
- жмем Open file

Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / buildVARIANT_HOVERCAR / firmware.BIN.
Я создал несколько вариантов прошивок с разными настройками и поэтому выбираю из своей папки.
- выбираем нужный файл и жмём Oткрыть

- для запуска процесса прошивки жмем Target – Program & Verify…, а в открывшемся окне – Start

После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
- теперь можно отпустить кнопку питания

Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры. Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех следует повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше сделать это как можно ближе к плате.

Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими.
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.

Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то зажать её и прокрутить пару раз потенциометр от минимума до максимума и оставить в минимуме, после чего кнопку можно отпустить)
- дождаться автовыключения либо выключить контроллер кнопкой питания
- включить и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля. Это так называемая “отсечка” от превышения максимальных оборотов. При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Звуковые сигналы ошибок
- 1 звуковой сигнал (низкий тон) : ошибка двигателя, возможные причины:
- короткое замыкание/обрыв датчика Холла
- фаза двигателя в обрыве
- неисправен FET (полевой МОП-транзистор)
- двигатель заблокирован физически
- 2 звуковых сигнала (низкий тон) : таймаут АЦП ( проблемы с подключением ручек газа или тормоза, либо они не откалиброваны)
- 3 звуковых сигнала (низкий тон) : тайм-аут последовательного порта ( )
- 5 звуковых сигналов (низкий тон) : предупреждение о перегреве контроллера
- 1 длинный звуковой сигнал (средний тон) : напряжение батареи менее, чем указано в #define BAT_LVL2
- 1 короткий звуковой сигнал (средний тон) : напряжение батареи менее, чем указано в #define BAT_LVL1
- 1 короткий звуковой сигнал (высокий тон) : включен реверс (задний ход)
Заказать готовую прошитую плату с нужными настройками
Если Вам нужна уже готовая прошитая плата, но по какой либо причине не хотите заниматься прошивкой самостоятельно, Вы можете заказать её здесь.
Источник



