
Конструируем валкодер
Валкодер – устройство, меняющее какую-то величину в зависимости от поворота оси. Такая штука водится, например, в роликовой мыши или в музыкальном центре. Собственно, сам по себе валкодер довольно прост, но мы усложним задачу тем, что не будем использовать микроконтроллер, как это практикуется во всех промышленных образцах. Валкодер интересен тем, что в нем переплетаются очень многие приемы, применяемые в цифровой и аналоговой электронике. Итак ТЗ: разработать устройство, изменяющее выходное напряжение в диапазоне 0 – 3В, в линейной зависимости от угла поворота оси. Изменение напряжение должно быть реверсивным, с количеством градаций не менее 80. Выходной сигнал должен быть изолирован он рабочих напряжений устройства (гальваническая развязка). Полное нарастание/спад напряжения происходит при изменении угла поворота оси от 0 до 1440 градусов (4 оборота). Устройство должно сохранять работоспособность в диапазоне питающего напряжения от 8 до 15В. Предусмотреть цифровую индикацию напряжения.
1. C чего начать?
Определим чего от нас хотят:
А. Во-первых «голова» устройства будет цифровой, т.к. будет считать импульсы, создаваемые вращающейся ручкой.
Б. Счет импульсов должен быть реверсивным, т.к. результирующая величина уменьшается и увеличивается в зависимости от направления вращения ручки.
В. Не менее 80 градаций выходного напряжения. Значит для установки напряжения нам потребуется не менее 8 бит двоичного кода (80[10] = 1010000 [2]). 80 градаций за 4 оборота, значит за оборот, ручка должна выдавать 20 импульсов. По одному импульсу через каждые 18 градусов.
Г. Для гальванической отвязки выходного напряжения, в преобразовательном каскаде (цифровой —> аналоговый) нужно будет использовать оптроны.
Д. При заявленном напряжении питания работают микросхемы серий К561 и 564.
Е. Цифровая индикация – простой узел, но потребуется еще 2 дешифратора в 7-и сегментный код.
2. Теперь попробуем описать алгоритм работы:
*При включении на выходе 0.
*ЕСЛИ на выходе 0 И есть импульс с датчика И ручка поворачивается по часовой стрелке – добавить 1 в выходной код.
*ЕСЛИ на выходе 0 И есть импульс с датчика И ручка поворачивается против часовой стрелки- не выполнять никаких действий
*ЕСЛИ на выходе 1010000 И есть импульс с датчика И ручка поворачивается по часовой стрелке- не выполнять никаких действий
*ЕСЛИ на выходе 1010000 И есть импульс с датчика И ручка поворачивается против часовой стрелки- вычесть 1 из выходного кода
*ЕСЛИ на выходе число отличное от 0 и 1010000 И есть импульс с датчика И ручка поворачивается по часовой стрелке – добавить 1 в выходной код
*ЕСЛИ на выходе число отличное от 0 и 1010000 И есть импульс с датчика И ручка поворачивается против часовой стрелки – вычесть 1 из выходного кода.
*ЕСЛИ нет импульса с датчика – не выполнять никаких действий.
3. Составим блок-схему устройства:
Очевидно, что механическая часть должна сообщать как о самом вращении, так и о его направлении. Значит датчик должен выдавать 2 сигнала. В результате получается, что устройство должно состоять из реверсивного счетчика, блока согласования-развязки и цифроаналогового преобразователя.
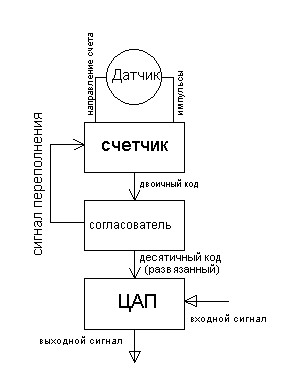
Согласователь должен выводить сигнал о переполнении и запрещать счетчику складывать (если получен максимум) или вычитать (если получен минимум).
4. Конструируем датчик:
Воды вылито достаточно, теперь можно говорить более предметно. Механика зависит от электроники, а электроника от механики, поэтому рассмотрим датчик как единое целое. Вполне понятно, что использовать оптический датчик гораздо удобнее, нежели контактный, значит мы пришли к перфорированному колесу. Получить импульсы проще простого, осталось определить направление вращения. Есть два пути: использовать две оптопары (излучатель + приемник) расположив их таким образом, что освещается сначала один приемник, а затем второй. Либо использовать заслонку, скользящую на той же оси, что и колесо (момент, создаваемый осью, должен превышать массу заслонки и она не должна поворачиваться под собственной тяжестью). Эта заслонка поворачивается синхронно с колесом на определенный угол (не более 4,5 градусов в обе стороны) и открывает/заслоняет дополнительный (стробирующий) фотоприемник. Этот вариант сильно усложняет механику, хотя весьма прост в схемотехнической реализации (логическая схема «И»), поэтому вернемся к первому варианту. Теперь прикинем временные эпюры сигналов, создаваемых датчиком.
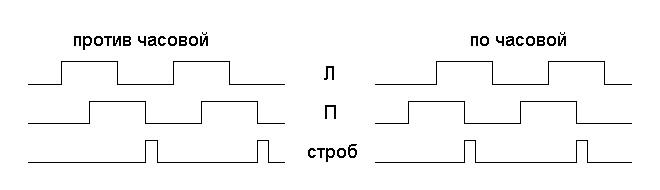
Как видно из рисунка, сигналы приемников смещены по фазе на 90 градусов. Этого легко добиться расположив приемники рядом в одну линию. Таким образом, когда отверстие проходит над приемниками, сначала освещается первый приемник, затем оба, затем второй.
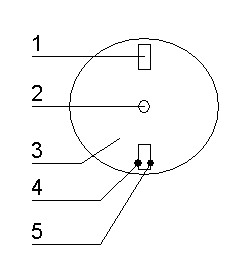
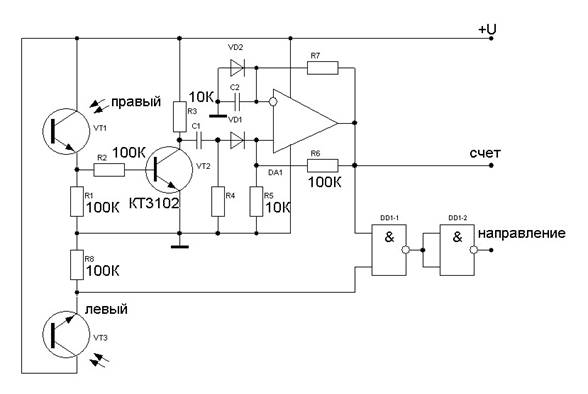
Предположим, колесо (3) вращается по часовой стрелке вокруг оси (2). Когда отверстие (1) подходит к оптопарам, Сначала освещается правый приемник (5), затем оба, затем только левый (4). И это повторяется 20 раз за один оборот. Из приведенных эпюр видно, что на заднем фронте импульса с правого приемника формируется некий стробирующий сигнал. На нем мы и будем строить результирующий сигнал датчика: во-первых, он генерируется в единственном экземпляре при освещении приемников, во-вторых, он прекрасно характеризует направление вращения. Совпадая с импульсом левого датчика при вращении по часовой стрелке, он дает возможность выделить положительный импульс при помощи логического элемента «И». Для получения этого чудо-импульса нам понадобится одновибратор для получения нужной длительности. Исходный фронт отрицательный, поэтому его нужно инвертировать. Попробуем набросать схему: петля ООС одновибратора рассчитывается исходя из максимальной частоты вращения колеса – длительность стробирующего импульса не должна превышать 1/4 периода «правого» сигнала. Цепочка С1R4 рассчитывается исходя из того, что формируемый ею импульс должен составлять 0,1Тстр.
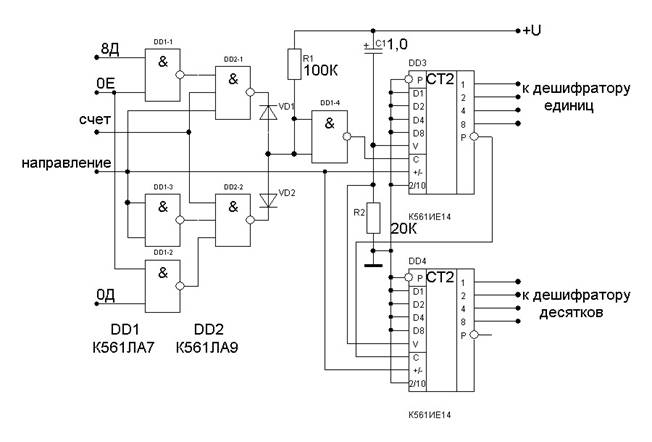
5. Построим самый простой блок в устройстве – счетчик.
Хотел нарисовать схему на триггерах, но это показалось мне совсем уж чудовищным глумлением над электроникой. Если интересно, схему реверсивного счетчика на триггерах можно найти в любом справочнике по цифровым микросхемам. Поэтому наша задача сводится к выбору стандартного счетчика из традиционных серий КМОП. Итак, определим требования к счетчику:
*Напряжение питания 8-15В
Таким условиям удовлетворяет К561ИЕ14
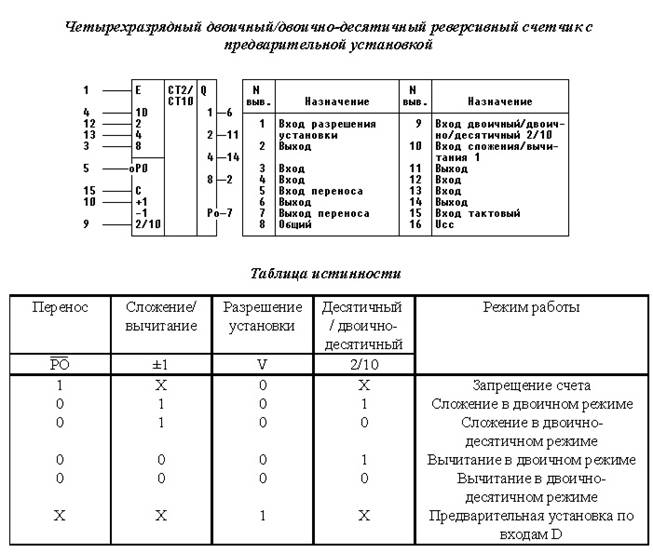
Как видно на картинке, у счетчика есть входы предустановки. При помощи этих входов мы можем быстро выставлять на выходе необходимое напряжение, вызывая из внешнего ОЗУ соответствующий код. Разумеется в ОЗУ должен быть создан некий банк сохраненных уровней. В ТЗ не оговорена такая возможность, поэтому используем входы предустановки для сброса. Так же есть вход запрещения счета (РО). Но использовать его для защиты валкодера от переполнения не получится. Дело в том, что этот вход вовсе блокирует считчик и не дает ему считать даже в свободном направлении, а нам нужно, чтобы при достижении критического уровня в одном направлении, свободное направление оставалось свободным. Поэтому сигнал переполнения мы выделим после дешифратора. Этим сигналом мы будем стробировать вход «С».
6. Теперь можно заняться сравнительно простыми, но громоздкими узлами – дешифратором и цифро-аналоговым преобразователем (ЦАП)
Вот таким, например, у меня получился дешифратор. Ничего хитрого: массовые дешифраторы и транзисторные ключи для управления оптронами и полупроводниковыми индикаторами СИД-ОА. Дешифраторы вполне традиционные: К561ИД1 – преобразователь двоичного кода в десятичный и К561ИД4 – преобразователь двоичного кода в семисегментный.

ЦАП будет построен подобным образом. Единственный тонкий момент – определение диапазонов. Сопоставление границ регулировки десяткам и единицам. У нас 7 десятков и 10 единиц. Разделим полное выходное напряжение на 80 градаций: получается 0,04. Умножим на 10 – получается 0,4. Значит, единичный разряд регулирует напряжение в пределах 400мВ. Следовательно, оставшиеся 2,6В управляются десятками. Теперь осталось только подобрать резисторы, переключаемые оптронными ключами и, с их помощью, выстроить нужную шкалу регулировки.
Источник
Валкодер из мышки
Я видел множество описаний валкодеров на оптопарах. Конструкция их проста: диск, поделенный на секторы и две оптопары, смещенные так, что сигнал на их выходах смещен на 90 градусов.

Сигнал с фотодиодов усиливается операционными усилителями (обычно) и подается в логическое устройство.
Логика определения направления вращения ручки проста, достаточно при перепаде логического «1» в логический «0» на выходе оптопары 1 следить за уровнем сигнала на оптопаре 2. Если там «1» — ручку крутят по часовой стрелке (шаг вверх), если там «0» — ручку крутят против часовой стрелки (шаг вниз).
Сложность изготовления заключается в большом количестве токарных и фрезерных работ, изготовлении диска с количеством секторов более 20, и в подстройке положения оптопар. Многие берут оптический механизм от компьютерных «мышей». В этом случае единственная сложность — разобрать мышку, пометить цоколевку диодов и смонтировать в своем устройстве механику.
Количество шагов моего экземпляра было 34, что даст при шаге в 25 Кгц 850 Кгц на оборот или 425 Кгц при шаге в 12,5 Кгц. Так же выяснилось, что уровней с «мышиных» фотодиодов достаточно, чтобы переключать логические элементы КМОП без усилителей на ОУ.
Мыши бывают с обычными фотодиодами и сдвоенными. Сдвоенные фотодиоды имеют общий анод и не подойдут для нашей цели (хотя можно извратиться).
В таком виде валкодер можно использовать для управления каким-либо устройством. В моем случае я не захотел усложнять программу и поставил небольшой дешифратор на 561ЛА7 (который придумал Игорь, RA9UWD, за бутылкой пива):
Источник
Валкодер из компьютерной мышки
| Попов Евгений Александрович RW6HRY http://rw6hry.qrz.ru/ Email e373 (at) aport.ru |
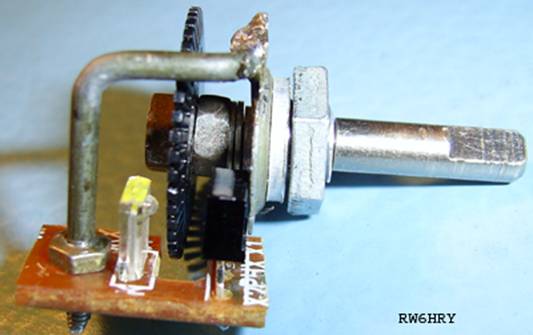
Трудно представить себе современный трансивер без синтезатора частоты . Большое количество публикаций посвящено созданию в домашних условиях синтезаторов на любой вкус от простейших однопетлевых, до модных сейчас схем на DDS . Неизменным атрибутом любого синтезатора является валкодер . Предлагаемая конструкция валкодера может быть повторена в течение часа любым радиолюбителем имеющим минимальные навыки слесарных работ . Этот малогабаритный валкодер отличается высокой надежностью и качеством работы .
В качестве основы конструкции используется малогабаритный переменный резистор СП3-4аМ

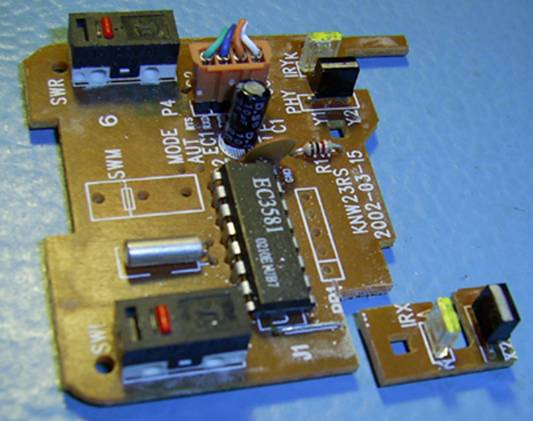
Оптопара для валкодера добывается из компьютерной мышки с шариком , благо их сейчас массово выбрасывают из-за появления нового типа оптических мышей . В компьютерном магазине мышку старого образца можно приобрести за 25-30 руб. Для валкодера потребуется диск с прорезями и оптопара . В мышке имеется 2 оптопары и 2 диска (итого 2 валкодера). Оптопара аккуратно отпиливается лобзиком как показано на рисунке:
Из переменного резистора добывается ось 9 , втулка 8 и гайка 3:

Дополнительно потребуются следующие детали — 2 гайки М2 (2), 2 гайки М3 (6) , 2 шайбы 3мм (7), кусок стальной проволоки (4) диаметром 2мм , длинной 40мм . На одном конце проволоки нарезается резьба М2 на длину 7мм.
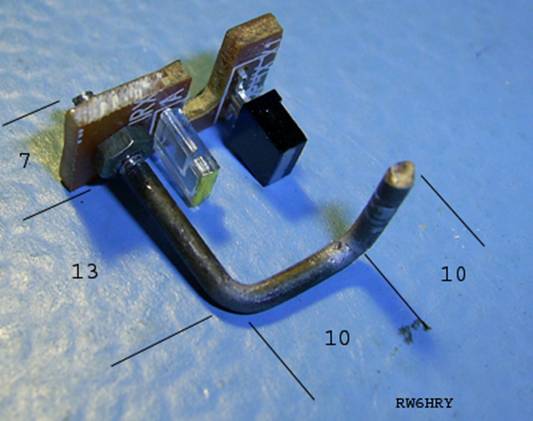
Затем проволока формуется согласно рисунка для получения скобы крепления оптопары . Все размеры даны в мм . Резьбовая часть втулки 8 несколько укорачивается . Для этого на нее одевается шайба , толщиной , равной толщине будущей передней панели , на которой будет укреплен валкодер , навинчивается гайка 3 . Вся выступающая часть резьбы аккуратно стачивается напильником . Это делается для того , чтобы увеличить длину резьбовой части оси .

Далее сформованная скоба припаивается к втулке как показано на рисунке . На задней части оси 9 переменного резистора нарезается резьба М3 на длину 7мм . Диск с прорезями 5 подготавливается следующим образом . Короткая часть оси диска удаляется острым скальпелем . Длинная часть оси зажимается в тиски. Точно по центру , предварительно намеченному острым шилом , просверливается отверстие сначала сверлом 1мм , затем 2.9 мм. Затем также скальпелем удаляется оставшаяся часть оси диска.
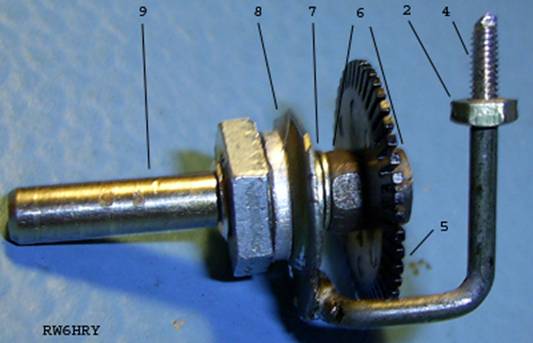
Далее вся конструкция собирается как показано на рисунке . Цифры обозначают номера деталей . Во втулку 8 вставляется ось 9 , одеваются шайбы 7 , навинчивается гайка 6 до положения , когда ось свободно вращается при отсутствии люфта , одевается диск 5 , весь пакет зажимается гайкой 6. Последний штрих — на скобе 4 закрепляется оптопара при помощи гаек 2 . Перед сборкой , ось желательно чуть смазать маслом.

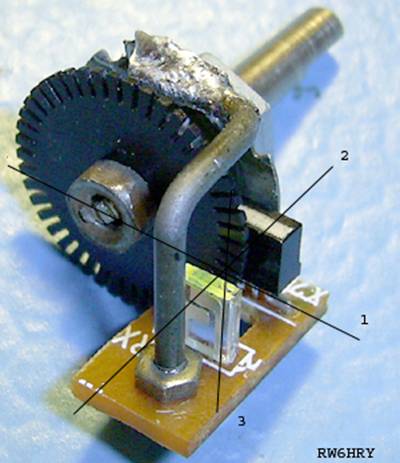
На этом рисунке показано , как именно должна располагаться оптопара относительно диска с прорезями . Для правильной работы валкодера нужно совместить 3 воображаемых линии — оптическую ось оптопары (2) , центральную линию диска с прорезями (1) и вертикальную ось светодиода и фотодиода (3). Оптическая ось оптопары проходит через маленький выступ на передней части корпуса светодиода . Диск при вращении должен пересекать точку пересечения воображаемых линий средней частью своих выступов и пропилов . Для точной установки положения оптопары , собранный валкодер закрепляется за гайку 3 , навинченную на втулку 8 в тисках . Придерживая одной рукой оптопару , нужно слегка расплавить припой , удерживающий скобу 4 , выставить требуемое положение оптопары , остудить припой .
Источник



