
OBD-сканер на базе Arduino



Мастер сделавший этот сканер владелец автомобиля Toyota Prius. Это гибридный автомобиль и на его приборной панели отсутствуют некоторые привычные приборы, например, тахометр или датчик температуры охлаждающей жидкости. Также интересно узнать о текущем расходе топлива или рассчитать среднее значение.
Все эти значения рассчитываются компьютером двигателя автомобиля, а для считывания данных просто требуется сканер.
Есть различные коммерческие решения, таким как Scan Gauge. Также можно использовать сканеры ELM327 работающий через Bluetooth. Популярными моделями являются Carista , BlueDriver или обычный диагностический сканер Innova / Bosch.
Мастер решил сделать сканер самостоятельно и установить его в свой автомобиль на постоянной основе.
Шаг первый: о шине CAN
Работа с CAN-шиной требует осторожности, при неправильных действиях можно вывести автомобиль из строя. Если вы не понимаете, что делаете, лучше приобретите готовый сканер.
CAN-шина — это система цифровой связи и управления электрическими устройствами автомобиля, позволяющая собирать данные от всех устройств, обмениваться информацией между ними, управлять ими.
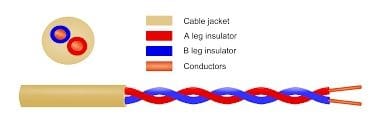
Шина CAN — это протокол дифференциальной связи. Это означает, что для нее нужно всего два провода. Обычно это витая пара. Мы будем получать доступ к устройству через порт OBD. Если вы решите повторить самоделку, то вам не обязательно понимать, как этот протокол работает на фундаментальном уровне, но вы должны понимать его достаточно, чтобы иметь возможность писать или изменять код Arduino.
Почти каждый автомобиль сегодня имеет порт OBD II. Все они имеют одинаковый электрический разъем под панелью приборов. Однако существуют совершенно разные протоколы связи в зависимости от производителя автомобиля. Любой автомобиль, проданный в США после 2008 года, использует шину CAN ISO 15765 и именно его мастер будет использовать.
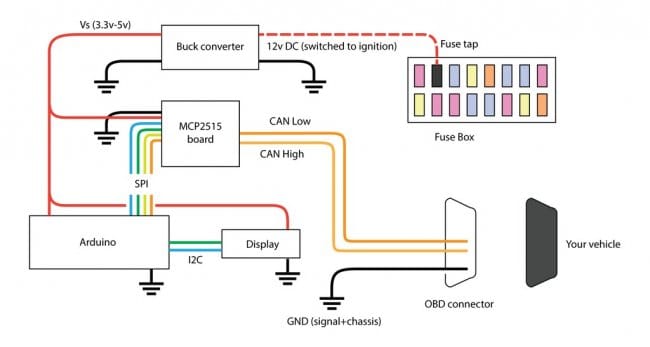
Шаг второй: схема подключения
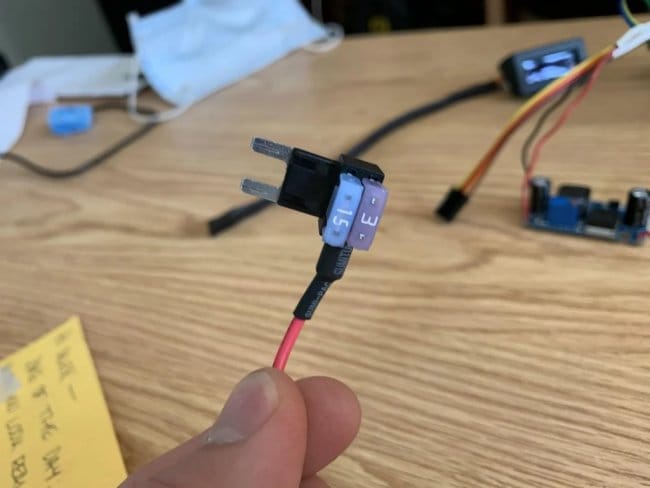
Питаться устройство будет от блока предохранителей. Конкретно он берет питание от цепи стеклоочистителя. Можно использовать любую цепь главное, чтобы она отключалась при вытаскивании ключа из замка зажигания. В противном случае устройство может посадить аккумуляторную батарею автомобиля.
12В может приходить и на порт OBD. Но здесь нужно быть уверенным, что провод именно питание, не сигнальная цепь.


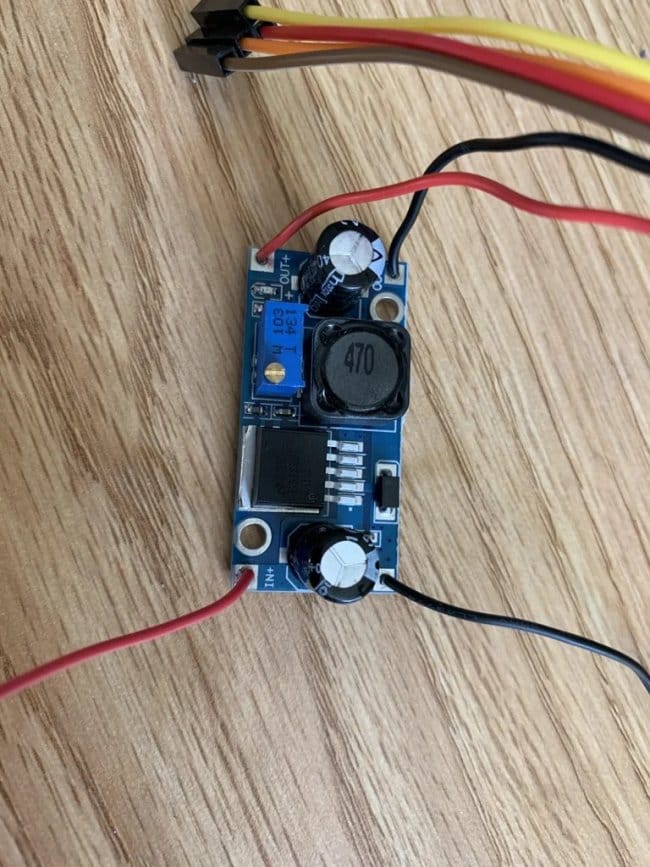
Шаг четвертый: предохранитель и понижающий преобразователь
Изначально мастер подключил Ардуино к бортовой сети автомобиля 12 В без понижающего преобразователя. К сожалению устройство долго не проработало и сгорело. Тогда он установил понижающий преобразователь.
Подключает Vin- понижающего преобразователя к заземлению OBD. Подключает Vin + понижающего преобразователя к 12 В автомобиля (через предохранитель).
Теперь нужно отрегулировать выходное напряжение. Мастер подключает нагрузку к выходу преобразователя и устанавливает необходимый диапазон.
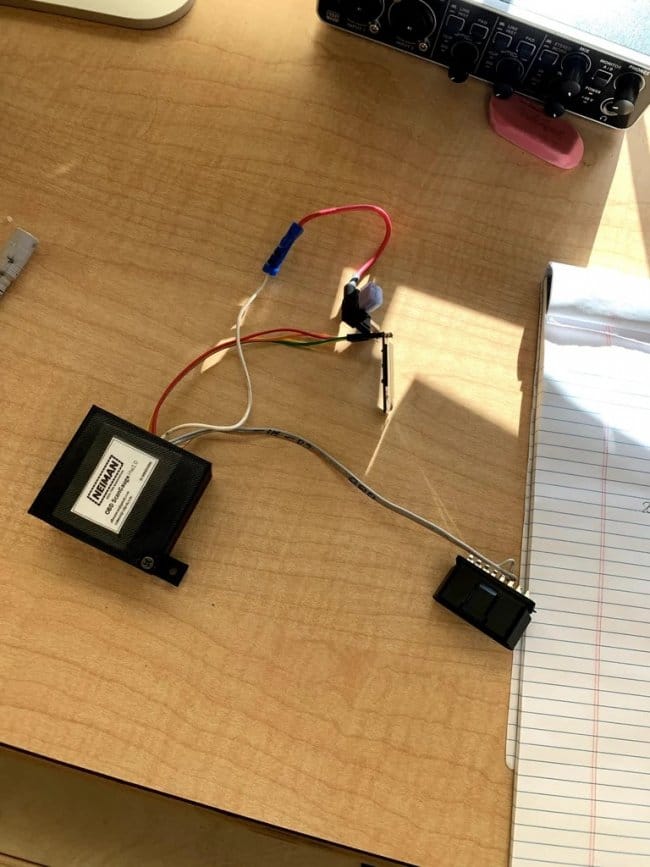

Шаг пятый: Arduino
Дальше нужно все смонтировать.
Мастер использует плату Teensy 4.0. Если будет использована другая плата, то распиновка может отличатся. Подключает напрямую контакты к плате CAN модуля:
MOSI (slave in)
MISO (slave out)
SS (chip select/slave select)
CLK (clock)
Возможно понадобиться подтягивающий резистор для интерфейса i2c.
Дисплей: подключайтесь напрямую (при условии, что используется тот же OLED-дисплей, что и у мастера) —
SDA (serial data)
SCL (serial clock)
Для питания дисплея подключает Vcc и GND. Эти четыре провода мастер установил в один разъем. Дисплей будет установлен на передней панели авто и при необходимости его можно будет снимать.
Источник
Всепротокольный OBD-2 AIIpro адаптер своими руками
Это, вероятно, случалось с каждым из нас: вы едете в своем автомобиле и вдруг желтая лампочка «Check Engine” загорается на приборной панели как тревожное предупреждение о том, что возникли какие-то проблемы с двигателем. К сожалению, это оно само по себе не дает каких-либо намеков на то, что именно является причиной неполадки и может означать все что угодно, начиная от неплотно закрытой крышки топливного бака до проблем с каталитическим конвертером. Я помню, как Honda Integra 94-го года имела ЭБУ под креслом водителя и красный светодиод начинал мигать, если возникали какие-то проблемы с двигателем.
Подсчитав количество «блинков», можно было определить код ошибки. По мере того, как ЭБУ автомобилей становятся все более и более сложными, количество кодов ошибок возрастает экспоненциально. Использование бортовой диагностики автомобиля On-Board Diagnostic (OBD-II) позволяет решить эту проблему. Данный адаптер позволяет использовать персональный компьютер для OBD диагностики. Адаптер AllPro функционально совместим с ELM327 и поддерживает все существующие OBD-II протоколы обмена данными:
• ISO 9141-2
• ISO 14230-4 (KWP2000)
• SAE PWM J1850 (Pulse Width Modulation)
• SAE VPW J1850 (Variable Pulse Width)
• ISO 15765-4 Controlled Area Network (CAN)
VPW, PWM и CAN
Первых два протокола ISO описаны в указанной выше предыдущей публикации. Детальное описание OBD протоколов выходит за рамки данной статьи, я лишь их кратко перечислю.J1850 VPW (Variable Pulse Width) – протокол автомобилей General Motors и некоторых моделей Chrysler со скоростью передачи 10.4 кбит/с по одному проводу.
Напряжение на шине VPW изменяется от 0 до 8 В, данные по шине передаются чередованием коротких (64 мкс) и длинных (128 мкс) импульсов. Реальная же скорость передачи данных по шине изменяется в зависимости от битовой маски данных и находится в пределах от 976 до 1953 байт/с. Это самый медленный из OBD протоколов.
J1850 PWM (Pulse With Modulation) используется в автомобилях корпорации Ford. Скорость передачи здесь 41.6 кбит/ с с использованием дифференциального сигнала по двум проводам. Напряжение на шине изменяется от 0 до 5 В, a длительность импульса составляет 24 мкс. Работа с этим протоколом требует аккуратности в программировании микропроцессора, так как скорость выполнения инструкций языка «C» на PIC микропроцессоре даже с улучшенной PIC18 архитектурой становится сопоставимой с длиной короткой посылки PWM протокола (7 мкс).
CAN (Controlled Area Network) протокол разработан Robert Bosch в 1983 году и окончательно стандартизирован в ISO 11898. Использование CAN шины данных в автомобиле позволяет различным устройствам общаться друг с другом, минуя центральный процессор, так называемый multi-master режим.
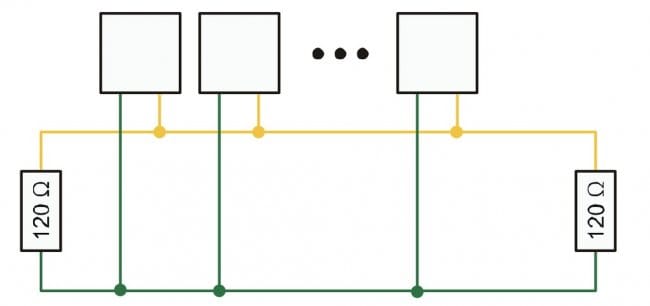
Плюсами является также повышенная скорость передачи, до 1 Мбит/с и лучшая помехоустойчивость. Изначально протокол предназначался для использования в автомобилях, но теперь применяется и в других областях. Чтобы повысить надежность передачи данных, в шинах CAN применяется способ дифференциальной передачи сигналов по двум проводам. Образующие эту пару провода называются CAN_High и CAN_Low.
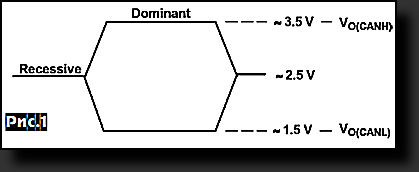
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном базовом уровне, приблизительно 2.5 В, называемым рецессивным состоянием. При переходе в активное (доминантное) состояние напряжение на проводе CAN_High повышается, а на проводе CAN_Low снижается, рис.1.
Существует также два формата сообщений или фреймов – стандартный с 11 битным адресным полем (CAN 2.0A) и расширенный с 29 битным полем (CAN 2.0B). Стандартом ISO 15765-4 определяется использование для целей OBD как CAN 2.0A, так и CAN 2.0B. Вместе со скоростями передачи по шине 250 и 500 кбит/с это создает 4 различных CAN протокола.
Поддерживает ли ваш автомобиль OBD-II?
OBD является обязательным только в Северной Америке и Европе. Если в Америке это правило действует с 1996 года, то Евросоюз принял EOBD вариант автодиагностики, основанный на OBD-II, сравнительно недавно. В Европе OBD стал обязательным, начиная с 2001 года, а для дизельных двигателей даже с 2004. Если ваш автомобиль выпущен до 2001 года, то он может вообще не поддерживать OBD даже при наличии соответствующего разъема.
Например, Renault Kangoo 99 года не поддерживает EOBD (хотя редакционная Kangoo dcI60 2004 года с CAN протоколом прошла успешную стыковку с описанным адаптером, а Renault Twingo поддерживает! Те же самые автомобили, сделанные для других рынков, например Турции, могут тоже не быть совместимыми с OBD протоколом. Как определить, какой протокол поддерживается электронным блоком управления автомобиля?
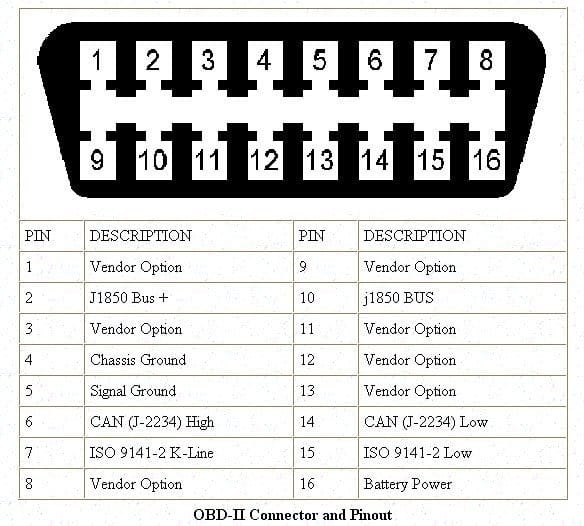
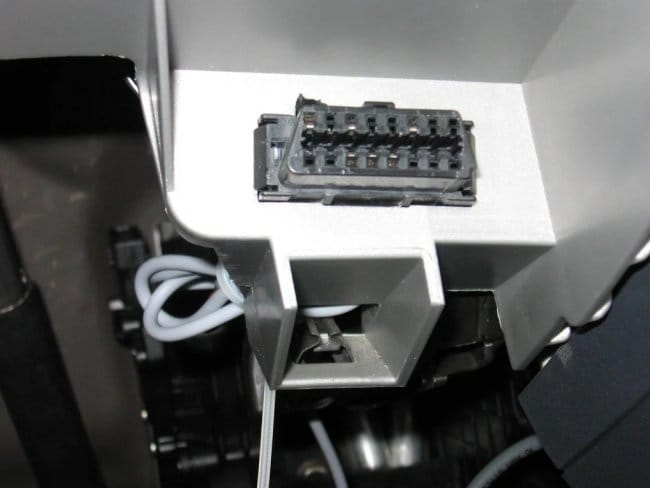
Первое – можно поискать информацию в интернете, хотя там много неточной и непроверенной информации. К тому же, многие автомобили выпускаются для разных рынков с различными протоколами диагностики. Второй более надежный способ – найти разъем и посмотреть, какие контакты в нем присутствуют. Разъем обычно находится под приборной панелью со стороны водителя. Протокол ISO 914-2 или ISO 14230-4 определяется наличием контакта 7, как показано в таблице 1.
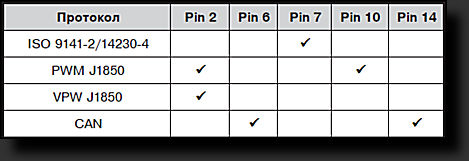
Большинство автомобилей последних лет выпуска поддерживает только CAN протокол с контактами 6 и 14 соответственно. В Европе и Северной Америке все новые автомобили, начиная с 2007/ 2008 года, должны использовать OBD только на основе CAN. Замечу, однако, что, как правильно отмечено в комментарии, «Если марка присутствует в таблице, то это не дает гарантии поддержки OBD-II».
Использование L-line в ISO 9141/14230… Отдельно хочется сказать по поводу L-линии в ISO 9141-2/ 14230-4 протоколах. Сейчас она практически нигде не используется, так как для процедуры инициализации связи вполне достаточно только K-линии. В стандарте же, однако, сказано, что сигнал инициализации должен передаваться по двум линиям одновременно, K и L. Владимир Гурский из www.wgsoft.de, автор программы «ScanMaster ELM», собрал большую коллекцию различных ЭБУ.
В качестве примера необходимости L-линии он приводит Renault Twingo 1.2л 2005 года выпуска. Использование здесь при иницилиазации только K-линии приводит к неверному адресу двигателя в ответах ЭБУ. Если же инициализация производится по K и L одновременно, то тогда все работает правильно.
AllPro адаптер на PIC18F2455
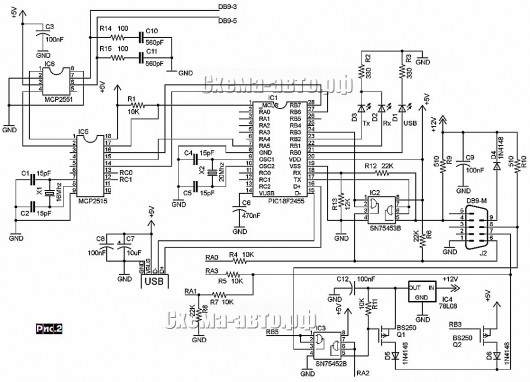
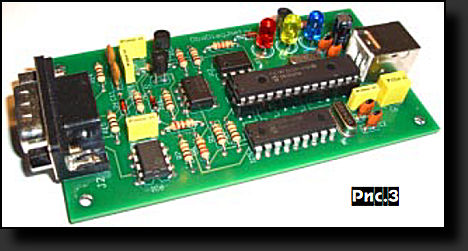
Схема моего всепротокольного OBD-II адаптера показана на рис.2 . Основой является микроконтроллер Microchip PIC18F2455, имеющий модуль USB интерфейса. Устройство использует напряжение питания 5 В от шины USB. Конденсатор C6 служит фильтром внутреннего стабилизатора 3.3 В для обеспечения работы USB шины. Светодиоды D2 и D3 являются индикаторами приема/передачи, а светодиод D1 использован для контроля статуса USB шины.
Выход ISO 9141/14230 интерфейса управляется половинкой драйвера IC2-2, а входной сигнал подается через делитель R12/R13 на вход RX (вывод 18), который является триггером Шмидта, как и большинство входов PIC18F2455, что обеспечивает достаточно надежное срабатывание. Для контроля L-линии используется IC3-1 и R10.
Шина J1850 VPW требует напряжения питания 8 В, получаемого от стабилизатора L78L08 IC4. Сигнал на выход VPW подается через инвертор IC3-2 и буферный полевой транзистор Q1. Делитель R7/R8 и внутренний триггер Шмидта на входе RA1 составляют входной интерфейс J1850 PWM протокола. Внутренний компаратор (входы RA0 и RA3) PIC18F2455 вместе с резисторами R4, R5 выделяет дифференциальный сигнал PWM. Для контроля выхода PWM шины используются IC2-1 и полевой транзистор Q2.
Отдельно хочется сказать по поводу поддержки CAN. Microchip не выпускает контроллеры, содержащие и CAN, и USB. Можно использовать контроллер с CAN модулем и внешний USB чип типа FT232R. Или наоборот, подключить внешний CAN контроллер, как сделано в этом адаптере. CAN интерфейс здесь образуют контроллер MCP2515 (IC5) и трансивер MPC2551 (IC6). MCP2515 подключен через SPI шину к PIC18F2455 и программируется каждый раз при подаче питания адаптера.
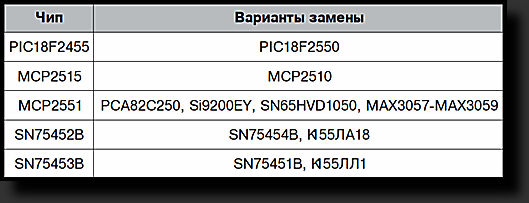
Согласующие (bus termination) RC цепочки R14/ C10 и R15/C11 предназначены для уменьшения отражений на CAN шине согласно стандарту ISO 15765-4. Использование их не обязательно, при относительно коротком кабеле отражениями можно пренебречь. Вместо PIC18F2455 можно использовать PIC18F2550 с той же самой прошивкой, см. варианты замены в таблице 2.
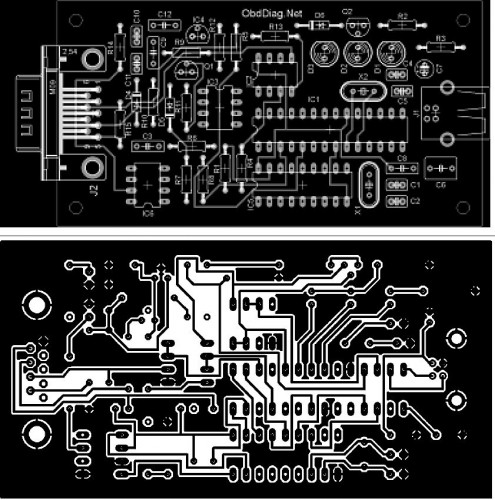
Внешний вид устройства показан на рис.3 и обложке, а печатная плата на рис.4.
Для программирования PIC18 можно использовать несложный JDM программатор [3], схема показана на рис.5.
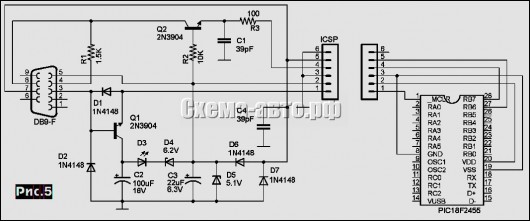
Он очень прост и может бы собран за час на макетной плате. Недостатком является то, что программатор требует наличия последовательного (Com) интерфейса в компьютере и не работает с виртуальными USB/Com адаптерами. Использование ноутбуков также не рекомендуется, так как они не обеспечивают необходимого напряжения на выходе Com порта.
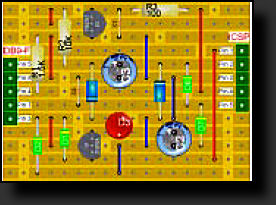
Разводка программатора показана на рис.6 и сделана с использованием так называемой «stripboard» технологии, достаточно популярного подхода к макетированию. Типичная stripboard имеет матрицу отверстий с шагом 2.54 мм для монтажа электронных компонентов, соединенных полосками меди на обратной стороне, отсюда и название – stripboard.
Разрезав полоски на обратной стороне и установив сверху проволочные перемычки, можно быстро собрать относительно несложные конструкции. Полоски легко перерезаются зенковкой отверстий обычным сверлом. Существует даже специальная программа – «LochMaster» [4] для проектирования конструкций таким способом. При использовании программатора следует обратить внимание, что корпус персонального компьютера (контакт 5 DB9 разъема) не соответствует корпусу программатора.
Другим условием является использование «полноценного» последовательно кабеля со всеми проводами, необходимыми для работы схемы. Программатор надежно работает с WinPic [5], единственная проблема заключается в том, что требуется отдельно загрузить файл-дескриптор PIC18F2455.dev (или PIC18F2550.dev) из дистрибуции Microchip IDE после того, как установлен собственно WinPic.
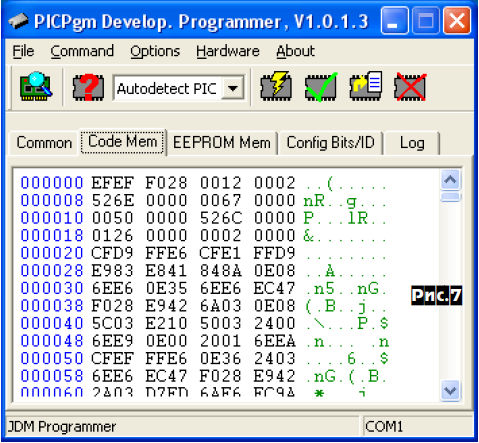
Другой программой, работающей с JDM программатором, является PICPgm [6], никаких дополнительных файлов здесь не требуется, хотя автору следует поработать над английской грамматикой, рис.7 . Прошивка адаптера доступна .
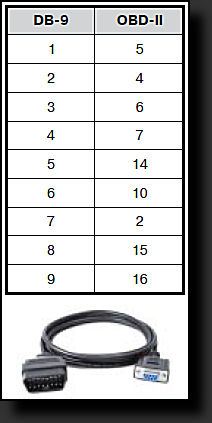
OBD-II кабель
Для подключения к бортовому компьютеру адаптер использует «стандартный» DB-9/OBD-II кабель. Разводка кабеля показана в таблице 3.
Подключение и тестирование устройства. Правильно собранный адаптер в налаживании не нуждается и распознается Windows как USB устройство. Микропроцессор PIC18F2455 не имеет собственного драйвера и использует Windows 2000/XP/Vista CDC (Communication Device Class ) драйвер usbser.sys виртуального Com порта.
По поводу использования драйвера хочется, однако, добавить, что согласно информации www.usb.org исправил баги в usbser.sys только начиная с Windows XP SP2 и использование адаптера с Windows 2000 может быть проблематично. После того, как адаптер распознался как USB устройство и драйвер установлен, можно приступать к тестированию.
Для этого требуется подключить источник стабилизованного напряжения 12 вольт на выводы 1 и 9 разъема J2 и подключить адаптер к персональному компьютеру через USB кабель. Проверяется наличие напряжения 8 В на выходе стабилизатора IC4. Следующим шагом является запуск Windows приложения HyperTerm и подсоединения к Com порту адаптера.
Устройство имеет процедуру самодиагностики с проверкой прохождения сигнала со выхода на вход по всем протоколам. Для этого используется команда «AT@3», рис.8.
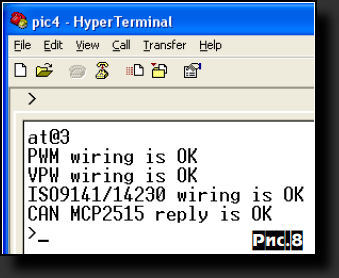
Прохождение проверяется по следующим цепям:
• IC2-1, R4 для отрицательной шины PWM
• Q2, D6, R5 для положительной шины PWM
• IC3-2, IC4, R11, Q1, D5, R7, R8 для VPW
• IC2-2, R9, R12, R13 для ISO 9141/14230
• Ответ контроллера MCP2515 по шине SPI
Например, отсутствие IC2 приведет сразу к двум ошибкам, рис.9 .
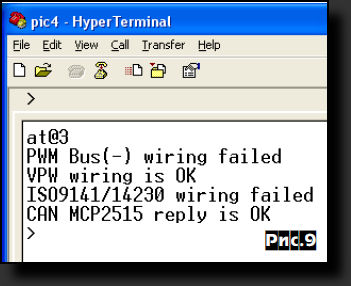
Процедура самодиагностики не включает проверку CAN трансивера MCP2551, здесь можно просто замерить напряжение на выводах 6 и 7. Оно должно быть в пределах 2.5 В.
Работа с Адаптером
Адаптер совместим по системе команд с ELM327 и может использоваться с приложениями, работающими с ELM327. Я предпочитаю использовать «ScanMaster ELM» Владимира Гурского [8], рис.10.
Источник



