
- Электронный напарник. Воронежец создал робота-теннисиста
- Приключения электроника
- Валентин
- «Хочу, чтобы мой робот приносил пользу»
- Воронежец создал робота-теннисиста
- ROBOVEDRO — робот для настольного тенниса
- Содержание / Contents
- ↑ Идея робота-теннисиста
- ↑ Конструкция подающего робота
- ↑ Тихоходный двигатель загрузки и блок управления
- ↑ Быстрый двигатель подачи и Блок управления
- ↑ Файлы
- ↑ Итоги
- Камрад, рассмотри датагорские рекомендации
- 🌼 Полезные и проверенные железяки, можно брать
Электронный напарник. Воронежец создал робота-теннисиста

Электронный напарник. Воронежец создал робота-теннисиста
Воронежец Михаил Агеев из подручных материалов собрал робота для игры в настольный теннис. «Электроник» по имени Валентин подает мячики и составляет компанию одиночному игроку. Робот обладает уникальным интеллектом. В дальнейшем Михаил Агеев планирует подарить его детской спортивной секции по настольному теннису.
Приключения электроника
Разработчик микроэлектроники и электронной техники Михаил Агеев – ведущий инженер компании в одном из воронежских медицинских центров, специализирующемся на МРТ. Он ремонтирует и обслуживает медицинскую технику и обучает молодых сотрудников. В 2001 году закончил физфак ВГУ по специальности «радиофизика и электроника».
– Я еще с седьмого класса знал, что буду либо хирургом, либо инженером-электронщиком, – признался Михаил Агеев.
Изобретатель родился в семье военных в Тамбове. Военный городок, в котором прошло детство Михаила, находился неподалеку от аэродрома. Мальчик все время приносил в дом части самолетов, к которым приделывал провода и пытался оживить, воткнув в розетку.
– Какое-то время что-то работало, потом шел дым, слышался хлопок – и проводка сгорала. Из-за моего увлечения проводка в нашем доме состояла из связанных и скрученных между собой кусков. Спасибо родителям, что относились к этому с пониманием и не отбили охоту что-то делать своими руками, – рассказал инженер.
Помимо программирования и электроники хобби Михаила Агеева – рыбалка, в частности на карпа. Перед тем как ловить рыбу, ее нужно прикормить в определенном месте. Рыбаки используют специальный кораблик для завоза прикормки, управляемый по радио и плывущий тихо, чтобы не распугать рыбу.
– Я решил сделать свой кораблик, работающий на радиоуправлении. Он подплывает к нужной точке, нажимаете кнопку – он сбрасывает корм и тихо уплывает. После того как рыба соберется у корма, мы забрасываем снасти, – говорит Михаил.
Корпус кораблика и его электронику Михаил Агеев сделал сам, добавив ноу-хау – воздушный винт, который не позволял бы судну запутываться в водорослях. После последней рыбалки кораблик остался на родине изобретателя, в Тамбове.
Валентин
У Михаила Агеева есть еще одно хобби – в свободное время он играет в настольный теннис.

– В детстве я никогда не посещал спортивные кружки или школы. Все началось с того, что на прошлой работе руководство купило стол для настольного тенниса. Так в течение двух лет я научился неплохо играть. Сейчас мы с коллегами и друзьями играем в обеденный перерыв и по вечерам, – сообщил Михаил.
Для совершенствования навыков он решил собрать робот-тренажер, подающий мячики.
– Было интересно заложить в него часть своего интеллекта и получить удовольствие от результата, – поделился Михаил Агеев.
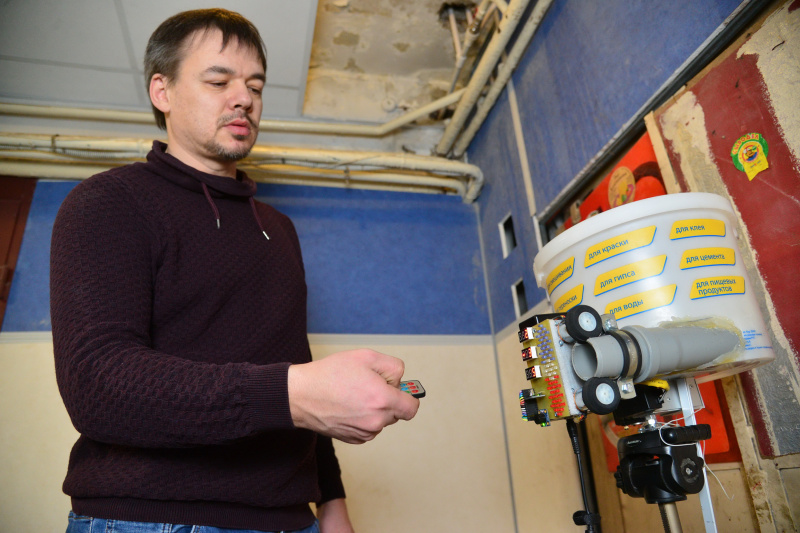
Свое детище изобретатель назвал Валентином – в честь дедушки, который все время что-то мастерил и изобретал. Рождение «Электроника» произошло на новогодних праздниках в домашней лаборатории. В ход пошли ведро от краски (ставшее емкостью для мячей), штатив для фотоаппарата, заказанные через интернет профили и блоки из Китая (электронные схемы и микроконтроллер, которые можно программировать).

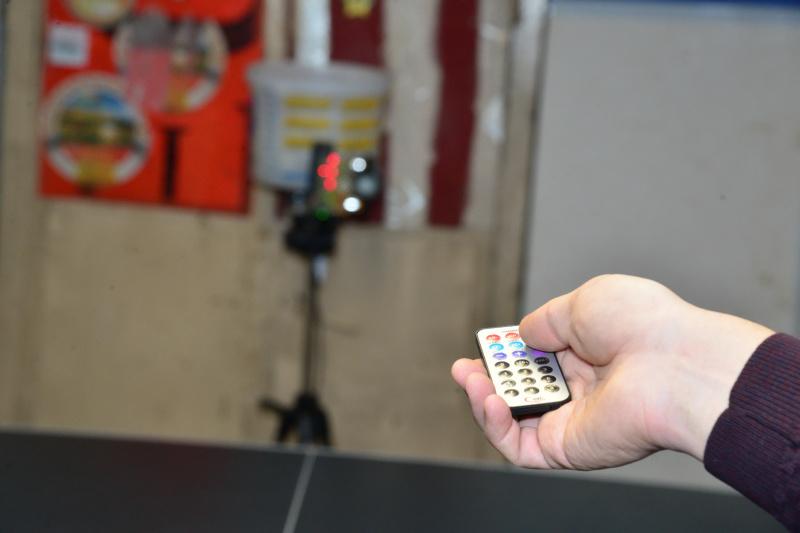
Механизм работы Валентина прост. В емкости для мячей вращается диск с прорезями, который подает мячики в трубу, а оттуда они по очереди попадают в так называемую пушку. На ней установлены два двигателя с валиками, которые могут вращаться с разной скоростью. Мяч попадает между валиками и выстреливает. Параметры выстрела можно задавать с помощью пульта дистанционного управления.
– Для поворота пушки под разными углами я использовал серводвигатель. Он поворачивает робота под углом, который я ему задаю, – отметил Михаил Агеев.
Робот не катается на колесиках – он статичен. Полноценно играть в теннис он также не может – электронный Валентин не отбивает, а только подает мячики. Создатель робота не называет свое детище изобретением – подобные роботы давно запущены в промышленное производство. Однако воронежский робот-теннисист уникален своим интеллектом.
– Функционал, который я в него заложил, гораздо богаче того, который имеют самые продвинутые промышленные образцы. Например, промышленные роботы всегда подают мячики в одну фиксированную точку или в две. А я сюда добавил программу, благодаря которой робот сможет, подобно живому игроку, рандомно поворачиваться и выбирать точку, куда он будет подавать мячик, – пояснил Михаил.
Валентин обошелся примерно в 5 тыс. рублей. Для сравнения: стоимость аналогичных промышленных роботов – от 20 тыс. (для простеньких китайских) до 250 тыс. рублей (для брендовых). При этом по функционалу Валентин ничем не уступает самым дорогим роботам.
– Самые дорогие брендовые роботы делают то же самое, что и мой робот. Скоро сделаю режим поворота – и он будет их превосходить, – похвастался воронежец.
«Хочу, чтобы мой робот приносил пользу»
Робот временно «живет» в подвальном помещении медицинской клиники. Здесь же находится теннисный стол, за которым медперсонал после работы играет в настольный теннис.
Перед тем как Валентин начнет работать, Михаил Агеев пультом задает ему нужные для тренировки параметры – например, частоту или скорость подачи мячей. Всего таких скоростей 25, для новичков оптимальна пятая.
To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video
Воронежец создал робота-теннисиста
Игрок становится напротив робота, а тот начинает беспрерывно выстреливать один за другим теннисные шарики. Михаил Агеев отбивает их ракеткой, направляя на противоположную часть стола. Робот останавливается, когда емкость для мячей пустеет. К тому моменту на полу скапливается масса шариков. Изобретатель раскрыл секрет: скоро у робота появится сетка, улавливающая отбитые мячи – это позволит не собирать их по всему помещению.

Можно менять положение пушки робота и задавать боковое вращение мячика – например, нижнее левое или верхнее правое. С помощью Валентина можно отрабатывать и «свечу» – удар, при котором мяч направляется по высокой траектории. Робот-теннисист воспроизводит технику подачи мячика, которой обладают спортсмены-профессионалы.
– Цель спортсмена – подать мяч как можно сложнее для своего противника. Соответственно, люди пытаются делать виртуозные подачи, закрутки, которые очень сложно отбить. Робот ничем не уступает им, к тому же он не устает, его точность и стабильность подачи мячей гораздо выше, чем у человека, – пояснил создатель робота.
В ближайших планах Михаила Агеева – усовершенствовать интеллектуальный режим Валентина. Тренажер для игры уже оценили знакомые Михаила, которые попросили собрать аналогичных «Электроников» и для них. Переводить изобретение на коммерческие рельсы Михаил не планирует и патентовать робота не собирается – говорит, что его мог бы собрать любой школьник.
Воронежец давно мечтает вести занятия по робототехнике для детей. Пока у Михаила Агеева только один ученик, с которым он изучает основы электроники и программирования.

– Мне интересно попробовать себя в роли преподавателя. Деньги за это брать не хочу – могу вести занятия бесплатно. Хочется передать свои знания и опыт следующему поколению, – признался инженер.
Михаил Агеев готов отдать Валентина в детскую школу настольного тенниса:
– Пусть дети учатся. Хотелось бы, чтобы мой робот приносил пользу.
Источник
ROBOVEDRO — робот для настольного тенниса

А ещё можно просто привыкнуть к новой накладке или ракетке, и хорошенько простучать её.
Содержание / Contents
↑ Идея робота-теннисиста
Идея создания робота-подающего закралась мне в голову года четыре назад. После разгромного поражения в первом турнире по настольному теннису на работе я не мог понять, как принимать целый ряд подач, направленных на подавление неопытных любителей.
Например, низкая подача с верхним боковым вращением в правый угол стола.
Противники, встречающиеся мне ранее, использовали более открытую игру и подобными подачами не пользовались.
Первой идеей было попросить знакомого кандидата в мастера спорта поднатаскать меня в приёме подобных подач. Но оказалось, что он с его стилем игры низкие подачи не использует.
Что оставалось делать? Искать нужного человека и просить его подавать мне сотни раз? Никто на это не согласится.
Так я и пришел к идее подающей машины.

В продаже подобных конструкций существует много, но они либо непомерно дорогие, либо бюджетные, и могут выполнить только плоский тип подач, не представляющих для меня никакого интереса.
Я начал активно изучать самодельные конструкции подобных машин и нашел многофункциональный вариант от японского дядьки, доступный для повторения и открытый для модификаций.
↑ Конструкция подающего робота
Конструкция проста. Тихоходный двигатель подаёт мячи в трубу, в которой быстрый двигатель с насадкой выбрасывает их, придавая вращение.
За основу я взял обычное 10-литровое ведро. Спилил ручку. Около дна прорезал отверстие под сантехническую сливную трубу диаметром 50 мм и временно проклеил стык термоклеем.


Вот и вся основа.
Теперь нужно установить подводящий двигатель и двигатель, выбрасывающий шар.
↑ Тихоходный двигатель загрузки и блок управления
Вариантов медленного двигателя у меня было немного. Либо редукторный на 220В, с частотой 45 оборотов в минуту. Либо шаговый от огромного принтера.
Редукторный вариант быстро отпал ввиду трудности регулирования частоты вращения. Вариант с шаговым двигателем мне казался более приемлемым в виду многообразия схем управления. В итоге использовал схему с Радиопарти.ру .

В основе лежит микроконтроллер PIC12F629, выходные управляющие сигналы которого открывают транзисторы КТ829А и подают напряжения питания в определённой последовательности на обмотки шестиконтактного шагового двигателя.


Из минусов платы хочу отметить практически полное отсутствие места под радиаторы управляющих транзисторов. При токе более 1,5А они обязательны.
Так же встала проблема в избыточном токе через обмотки двигателя. Сопротивление каждой обмотки 6 Ом, от средней точки соответственно 3 Ом. Напряжение питания 15-20 Вольт. При максимальном напряжении через обмотку от средней точки будет протекать 6,5А, что просто неприемлемо и приведёт к быстрому выходу из строя шагового двигателя. Добавил гасящий резистор на 5 Ом 20 Ватт последовательно средней точке обмотки, чтобы максимальный ток не превышал 2,5 А.
Просверлил в центре ведра отверстия под крепление двигателя. На двигатель насадил полую трубку диаметром 8 мм и нарезал внутри резьбу диаметром 4 мм. Никакого стопора сверлить не стал, а просто посадил трубку на суперклей. Решение простое, но не очень надёжное.


Из ЛДСП толщиной 4 мм вырезал диск, диаметром чуть меньше диаметра дна ведра. В диске сделал воронкообразный вырез-ловушку, чтобы туда попадал мяч и не выкатывался вплоть до подачи его в трубу. В центре диска просверлил и раззенковал отверстия под винт 4 мм впотай и соединил двигатель с диском.
В видео демонстрируется принцип подачи мяча в трубу.
Внутренности нужно делать максимально глянцевыми и скользкими, чтобы уменьшить трение и нагрузку на двигатель.
↑ Быстрый двигатель подачи и Блок управления

Как видно на фото, на двигателе стоит нехитрая насадка. В качестве переходника использована биметаллическая трубка диаметром 6 мм.
Со стороны двигателя высверлено отверстие под посадки внатяг и законтрено при помощи винта диаметром 2 мм. На трубку насажено колесо от игрушечного танка, с которым я так любил проводить время в детстве. На танке было много колёс, из которых было выбрано самое сбалансированное.
На колесо наклеена полоска, вырезанная из китайской накладки для теннисной ракетки «KTLPROXP».

Эта накладка проработала на ракетке всего пару месяцев и совершенно мне не понравилась. Снял её и без всяких сожалений разрезал на ленты. Подкладка и рабочая поверхность этой накладки в теннисном жаргоне очень «тухлая», то есть мягкая и мяч возвращают с огромными потерями по скорости, относительно скорости приёма.
Подобные качества отлично подходят для выталкивания мяча из трубы: колесо захватывает мяч, проминает губку накладки и придаёт дополнительное вращение.
Наклеить вырезанную полоску на пластик не получится, слетит моментально. Сначала я проклеил колесо обычной бумагой при помощи суперклея. После этого уже наклеивал полоску на колесо при помощи резинового специального клея для накладок «DAWEI Blue Devil».

Боковые поверхности так же промазал для лучшей фиксации.
Биения этой комплексной насадки играют важную роль и с первого раза я не смог собрать добротный экземпляр. Все отверстия сверлил микродрелью с заметными неточностями, что привело к серьёзным биениям и общей вибрации.
Для финального варианта пришлось использовать сверлильный и токарный станки.
Двигатель располагается на отдельной сантехнической трубе длинной 20 см и диаметром 50 мм, которая вставляется в основную трубу. Сделано это для того, чтобы можно было вращать получившуюся сборную насадку относительной основной трубы. Смена угла будет менять направление вращения мяча при вылете.
Двигатель закреплён на деревянном бруске при помощи пары просверленных червячных хомутов и винтов 40×4 мм. В трубке вырезано отверстие, в которое входит колесо.
Уровень входа колеса необходимо подбирать. Чем сильнее контакт мяча и колеса, тем больше закрутка и скорость выхода. Но здесь главное не переборщить, иначе мячи будут быстро разбиваться.
Малый же контакт с мячом приведёт к случайному выбросу мяча по силе и закрутке.
Мой вариант с деревянным бруском в качестве основы не самый лучший, так как затяжка со временем продавит волокна древесины и придётся подтягивать конструкцию. Результирующую насадку с трубой и двигателем закрепил на основную трубку и затянул червячным хомутом. Без затяжки даже малая вибрация сможет сменить угол установки.
Видео работы системы с быстрым двигателем.
Основные плюсы щёточного двигателя: он довольно дешёвый, мощный, практически не теряет скорости при контакте колеса с мячом и не требует дополнительной схемы управления. Минусы – шумный и тяжёлый.
Можно было поставить бесколлекторный мотор, но при нужной мощности он будет довольно дорогим удовольствием, да и без платы управления его не запустишь.
Чтобы зарядить ведро я купил в Китае «боеприпасы» — 100 шт. теннисных шаров Huieson 40+ .

Настройка системы заняла пару дней. Шарики не всегда закатывались в трубу и при загрузке более 70 мячей движок клинило. Причиной послужила чёрная матовая краска внутри, которая увеличивала трение. Пришлось внутренности экстренно перекрашивать в глянец.
При длительном использовании заметно разогревался шаговый двигатель. Для надёжности в основу из ДСП врезал вентилятор для охлаждения двигателя и гасящих резисторов.

Ниже выкладываю игровой тест робоведра. Робот поставлен высоко для имитации навесного топспина (сильное верхнее вращение) — элемента, на приёме которого чаще всего ошибаются новички и любители.
На видео есть элементы подрезки, перекрутки, резкой контратаки и левого отыгрыша. Снято в сельском доме культуры, с явно выраженной атрибутикой Советского периода.
Сетки-уловителя у меня нет, поэтому всю сотню шаров потом приходится собирать по всему полу.
Информация для тех, кто в теме: в руках у меня кастомная ракетка из Европейского основания «StigaEnergiWood», красная накладка – «MarsII», чёрная – «Stiga CALIBRA TOUR H».
↑ Файлы
↑ Итоги
Плюсы:
• Простота (если не брать в расчёт токарные работы) и дешевизна конструкции.
• Универсальность, ведь варьируя угол контакта колеса с мячом можно настроить практически любой тип подачи.
Минусы:
• Большое ток потребление (порядка 3А) и шумность при работе.
• Невозможность подачи некручёного мяча. Варируя положением колеса относительно мяча, можно настроить совсем лёгкое вращение, но совсем от него избавиться невозможно, для этого нужно второе колесо.
Надеюсь, что статья будет полезна и вдохновит на сборку аналогичного аппарата. По себе скажу, что после пары недель тренировок с роботом я намного уверенней себя чувствовал при игре с реальными людьми.
На базе этого робота можно собрать более сложные подающие машины, добавляя второе колесо для усиления вращения или подачи плоского мяча. Можно установить автоматику, дистанционное управление и т.д.
Спасибо за внимание!
Камрад, рассмотри датагорские рекомендации
🌼 Полезные и проверенные железяки, можно брать
Опробовано в лаборатории редакции или читателями.
Источник



