
Манипулятор своими руками из фанеры

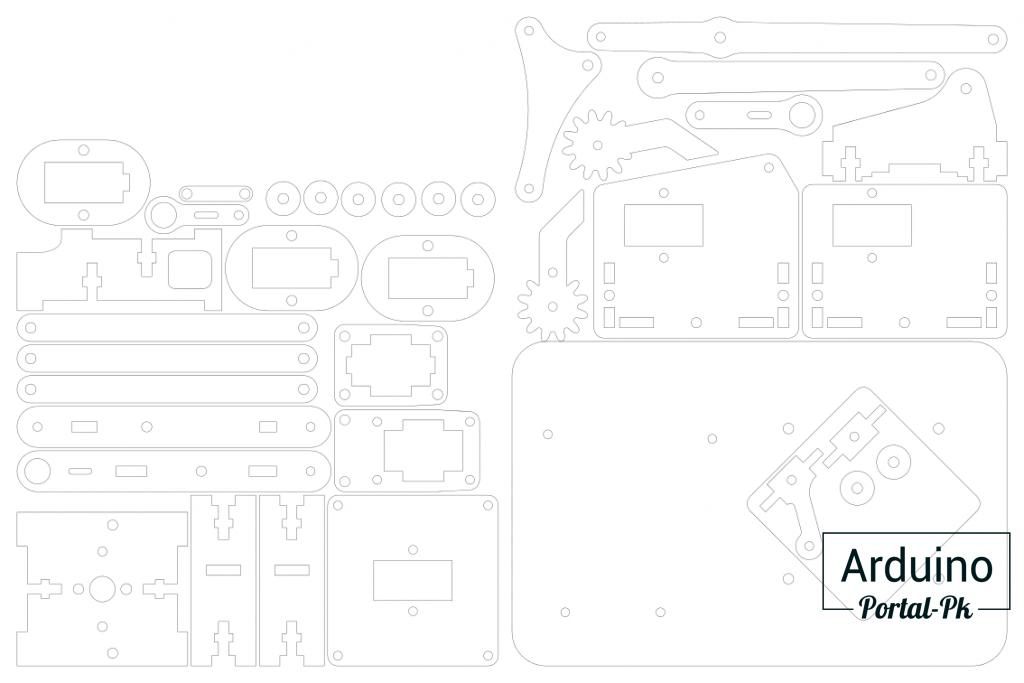
Как вы знаете сделал я самодельный ЧПУ фрезерный станок. Входе обучения работы на нем я делаю различные поделки и механизмы. Нашел в интернете исходные файлы (MeArmV03.svg) для манипулятора и решил вырезать его на ЧПУ станке.
Я думал что с первого раза у меня ни чего не получиться. Так как это достаточно сложная работа для ЧПУ и очень много мелких деталей.
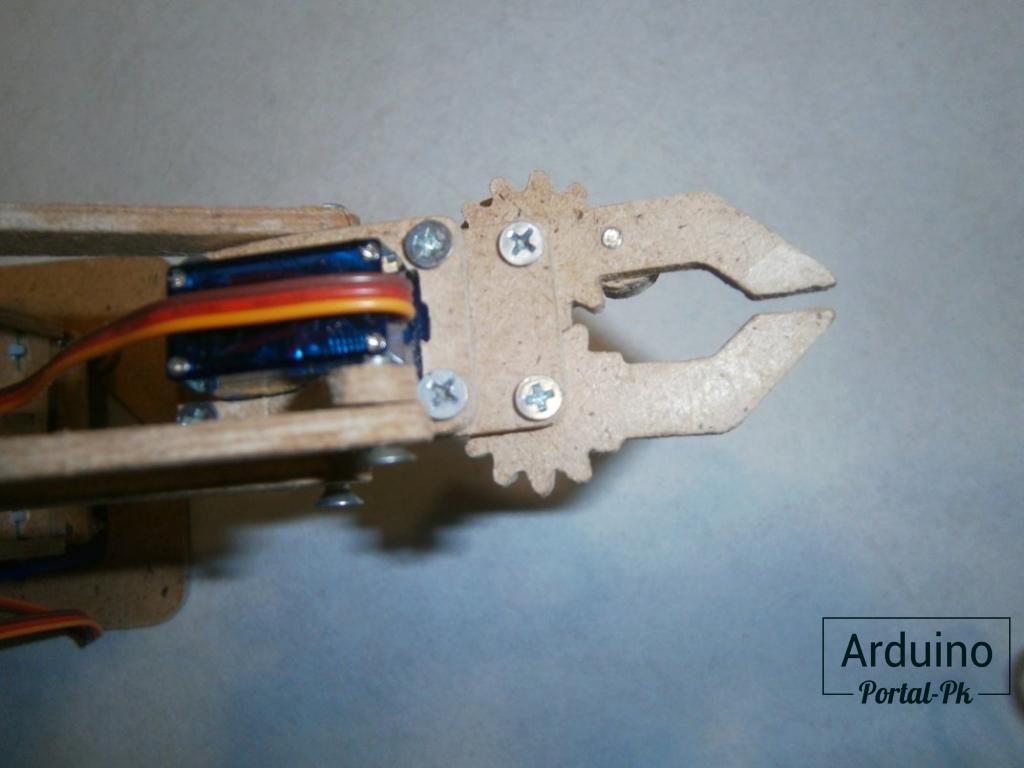
ЧПУ резал больше часа и вырезал все детали. Провел небольшую доработку с помощью надфиля. Собрал на винтики манипулятор. Кстати в интернете много инструкций, от текстовых до видео по сборке манипулятора.
И Вот что у меня получилось. Достаточно не плохо на мой взгляд.
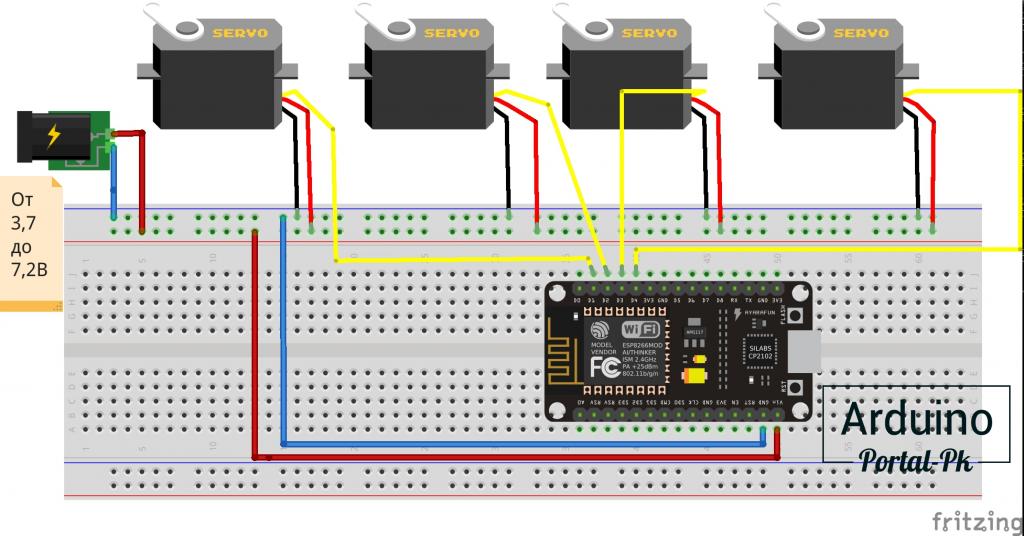
Серо-приводы установлены, Манипулятор собран. Но как проверить его работоспособность. Поискал в интернете примеров не дал результатов и тогда я решил набросать небольшой пример кода для NodeMCU. Тем более у меня лежал без дела шилд для данной отладочной платы.
Код получился не очень красивый но для проверки достаточно.
Вам скорее всего нужно будет изменить начальные угол для серо-приводов.
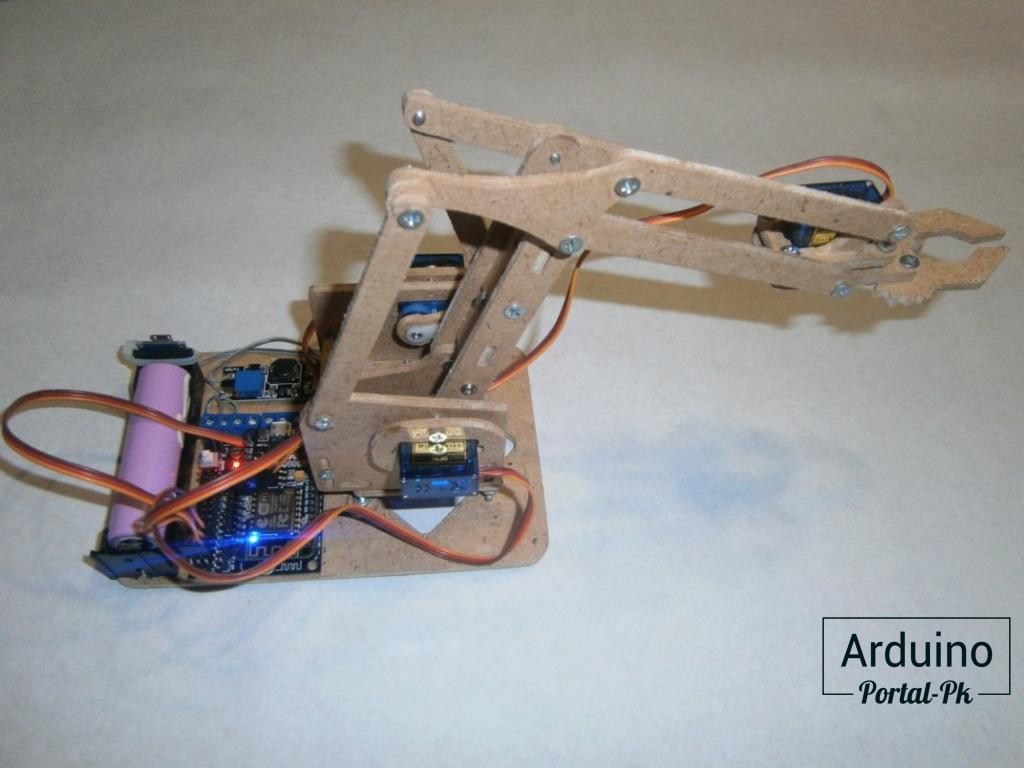
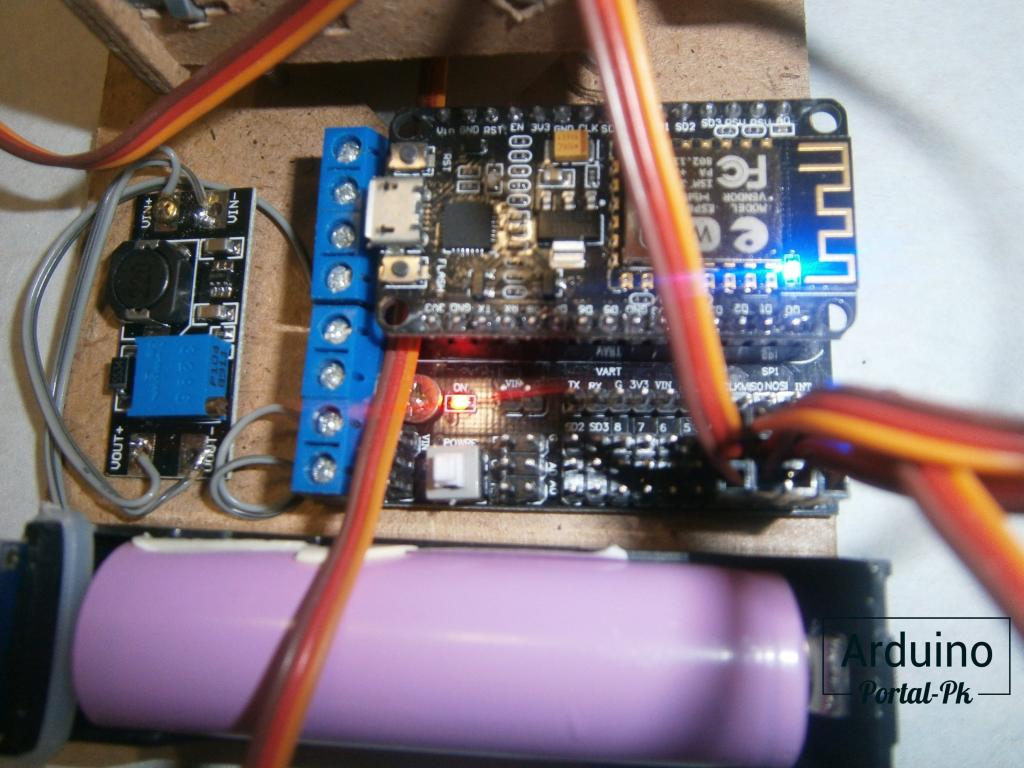
Тестирования самодельного манипулятора показал , что все работает но скорее всего не достаточно питания от одного аккумулятора 18650. И происходить перезагрузка NodeMCU .
Запланировал доработку кода для руки-манипулятора и переделать источник питания. Но как скоро будет продолжение зависит от вас и от свободного времени.
Понравилась статья? Поделитесь ею с друзьями:
Источник
Делаем игрушку гидравлический манипулятор из картона

Здравствуйте уважаемые любители самоделок! Решил порадовать племянника и собрать ему достаточно интересную игрушку. Заодно и Вам рассказать. Пример работы манипулятора Вы можете посмотреть на видео ниже, так же, в нём я постарался максимально подробно показать процесс сборки:
И так, нам понадобится: картон, 8 шприцов,трубочки от капельницы, пару кусков проволоки, деревянные линейки либо палочки от мороженого, 16 хомутиков, супер-клей, термопистолет и зубочистки, или так называемые деревянные шпажки.
Я изготавливал *на глаз* и все размеры брал из головы. Поэтому Вы так же можете изготовить любых размеров.
Для тех, кто заинтересуется изготовлением, сделал сделал чертёж с размерами моих деталей.
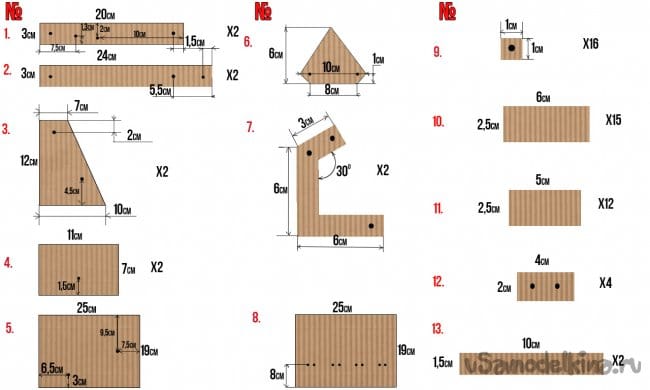
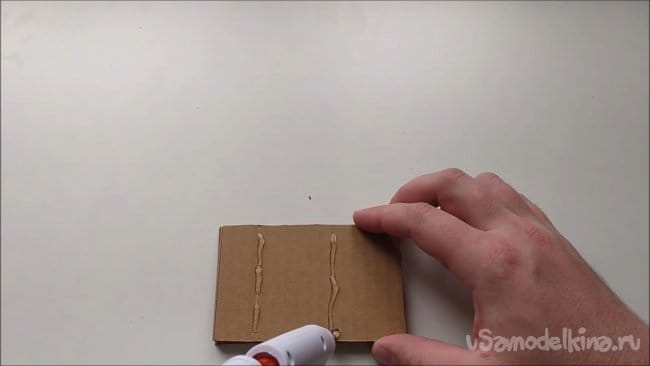
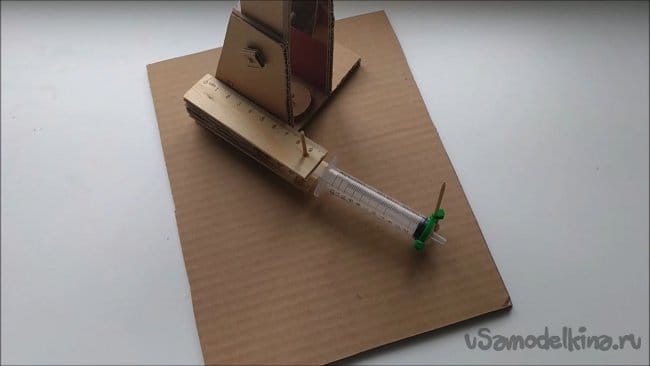
Соединяем детали №1, №2 и №3 между собой с помощью зубочисток и четырёх деталей №9. Расстояние между ними должно быть такое, что бы свободно помещался шприц. Проклеиваем соединения супер-клеем.
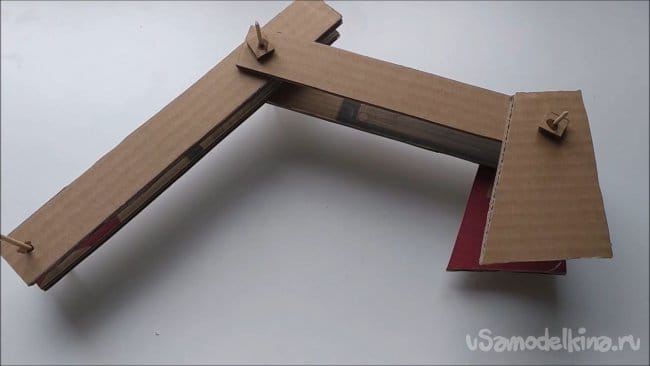
Склеиваем детали №4 между собой. И приклеиваем к ним собранную ранее конструкцию:

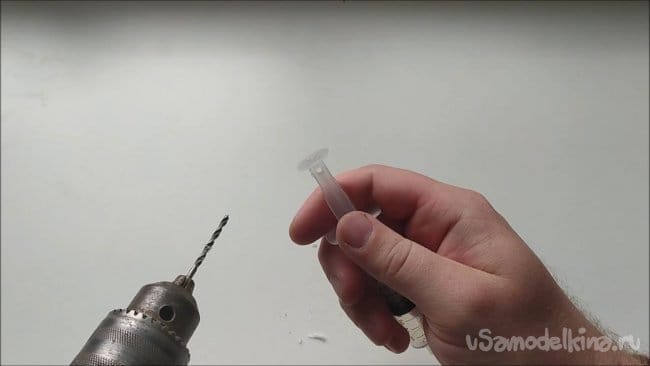
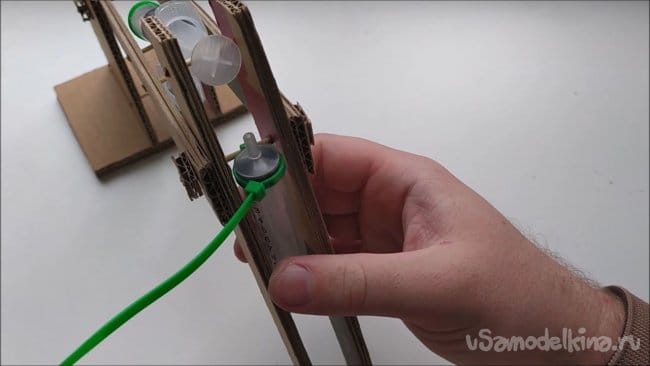
Берём шприцы ( я взял 12мл), сверлим в каждом из нём отверстие как на скриншоте. И зажимаем на семи из них, по два хомутика
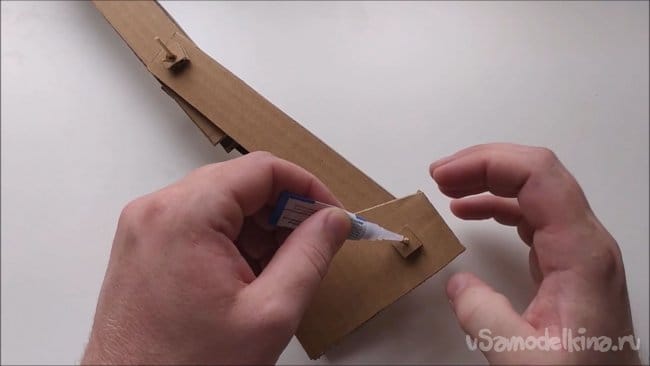
Прикрепляем с помощью зубочисток первые два шприца как показано на фото:
Берём детали №6, №7, №9 и №13, пару кусков проволоки. И изготавливаем вот такой захват:
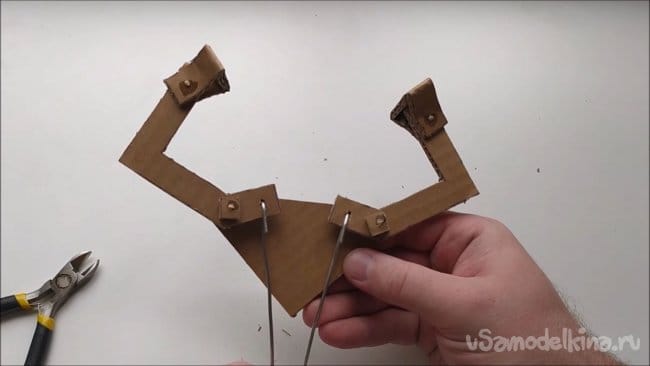
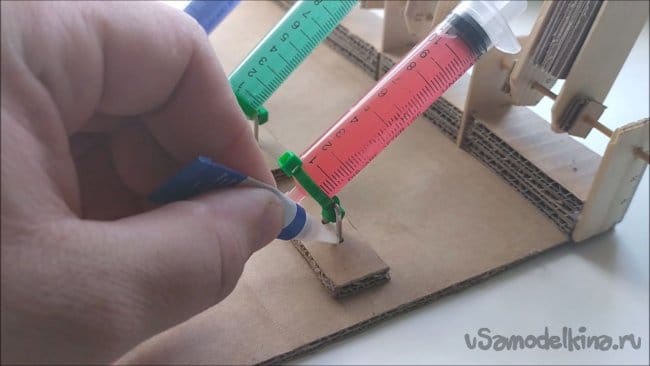
На соединительную зубочистку между деталями №1 и №2 зацепляем 2 хомутика и зажимаем шприц. Приклеиваем захват к деталям №1. :В отверстие шприца вставляем окончания проволоки идущие от захвата, и загибаем
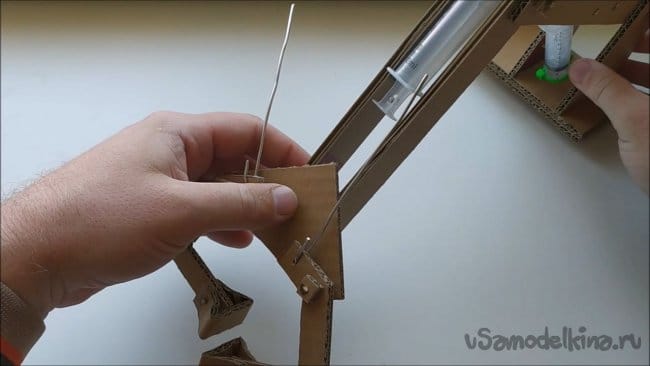

Берём деталь №5, вставляем в отверстие зубочистку, проклеиваем и устанавливаем наш манипулятор, через отверстие в детали №4. Фиксируем, проклеиваем.


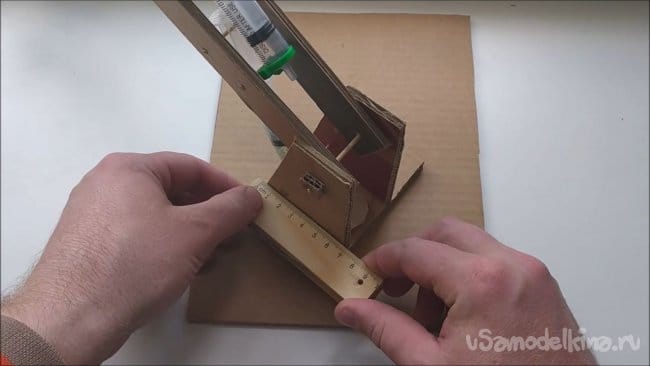
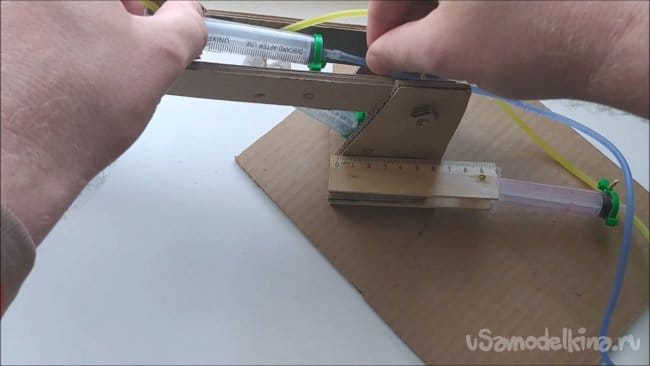
Далее склеиваем между собой три детали №10 и приклеиваем к ним две половинки линейки или две палочки от мороженого. Приклеиваем это сбоку детали №4. Соединяем с одним шприцом. Это будет поворотный механизм.

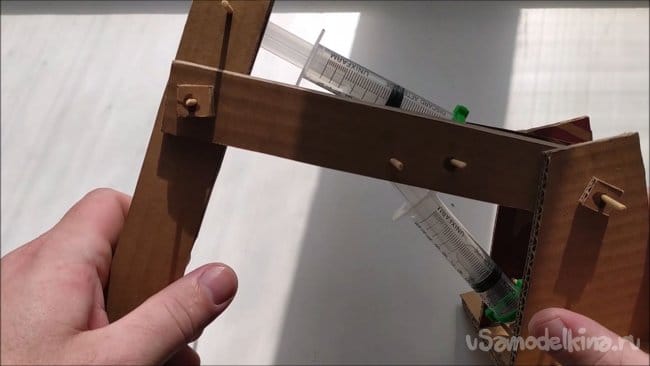
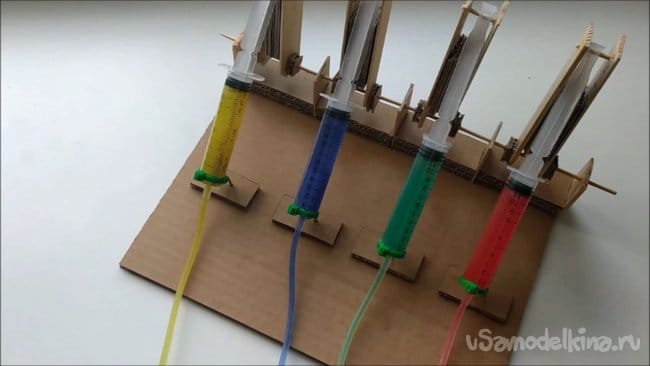
Соединяем между собой детали №11 по три штуки и приклеиваем к ним сверху и снизу кусочки линейки ( в моём случае). Таким методом делаем четыре рычага. Далее на деталь №8 приклеиваются детали №10, склеенные по три. Между ними так же приклеиваются кусочки линейки с отверстиями. В отверстия вставляется палочка и устанавливаются рычаги. Затем приклеиваются детали №12 и скобы.
Устанавливаются шприцы. В шприцы я набрал воды разведённой с краской, что бы было проще ориентироваться какой рычаг, каким узлом управляет. Всё проклеивается.
Ну вот и всё, готово! Всем спасибо за внимание и хорошего настроения!
Источник
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
Сейчас моя робо-рука выглядит так:

Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.
Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:
В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Источник



