
—>Технический сайт радиолюбителя —>
Добрый день всем любителям попаять. Хочу поделиться с вами своим опытом по сборке и наладке частотного преобразователя «ВОСЬМИКРУТ». Автор данного аппарата уважаемый человек под ником DC-AC на известном сайте РадиоКот . Ссылки на статью и обсуждения на форуме прикреплю ниже.
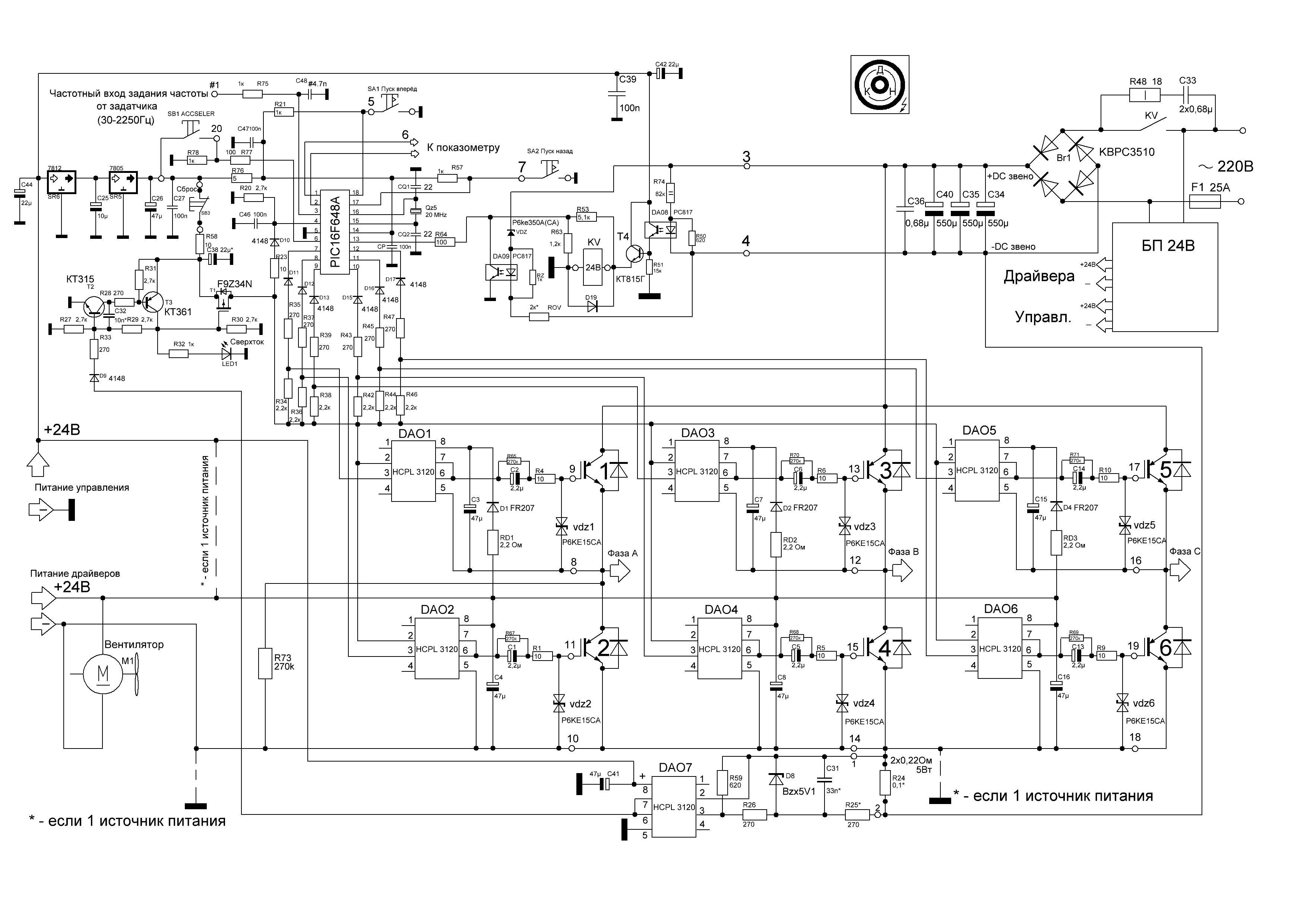
Частотный преобразователь «ВОСЬМИКРУТ» выполнен по схеме двойного преобразования. Сетевое напряжение выпрямляется неуправляемым выпрямителем, фильтруется, а затем преобразуется транзисторным инвертором с помощью ШИМ в регулируемое трёхфазное напряжение. Выходная мощность преобразователя определяется параметрами тока выпрямителя и инвертора, а также параметрами питающей сети. Главными достоинствами являются лёгкий запуск, регулирование скорости и высокий коэффициент использования мощности двигателя при питании от одной фазы. Программная часть выполнена универсальной (см. описание к конкретной программе). Возможно подключение к преобразователю любых двигателей мощностью до 4кВт, а также двигателей большей мощности, например 5,5кВт, но при условии соответствия по току силовой части. Для получения номинального момента на валу при однофазном питании 220В следует подключать обмотки двигателя к частотному инвертору по схеме “треугольник”.
— скалярный способ управления двигателем
— простая разомкнутая система регулирования
— линейная зависимость U/f с поднятием U на низких частотах
— полное использование питающего напряжения на номинальной частоте
двигателя (при входном напряжении 220В 50Гц трёхфазный выход 220В 50Гц)
— минимальная выходная частота 1Гц
— максимальная выходная частота 75Гц
— шаг изменения частоты 0,5Гц
— легкий реверс двигателя
— регулирование выходной частоты кнопками или крутилкой
— разгон на установленную разгонную частоту одним нажатием кнопки
— установка разгонной частоты с сохранением параметра
— установка темпа разгона-торможения с сохранением параметра
— регулирование выходной частоты аналоговым задатчиком
— возможность работы с автозапуском (подходит для управления приводом
компрессора в функции давления)
— возможность управления с внешнего пульта
— универсальность платы управления по раскачке различных вариантов
силовых транзисторов и модулей ( двуполярное напряжение раскачки
затворов, пиковый ток управления 2,5А, dead time= 2мкс)
— защита от пониженного напряжения (просадки) сети и превышения DC
напряжения при торможении
— защита от перегрузки и короткого замыкания.
Теперь перейдем к практике.При изготовлении данного частотника, я применял самые дешовые комплектующие,которые смог найти на просторах сети. Силовые ключи применил FGA25N120ANTD,оптодрайвера А3120. Радиаторы силовх ключей от процесоров пк. Все остальное с разборки.
Непосредственно схема самого частотника и блока питания.
 Несколько фото:
Несколько фото:
Источник
Частотный привод 5-200Гц (10-400Гц) своими руками
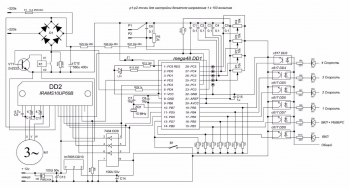
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200Гц
- Скорость набора частоты 5-50Гц в секунду
- Скорость снижения частоты 5-50Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750вт, но крутит и 1.1кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса .
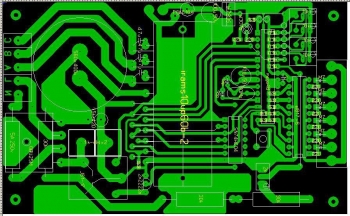
Проект в layout
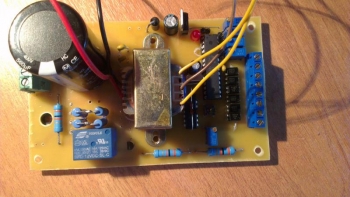
Ниже фото того, что у меня получилось
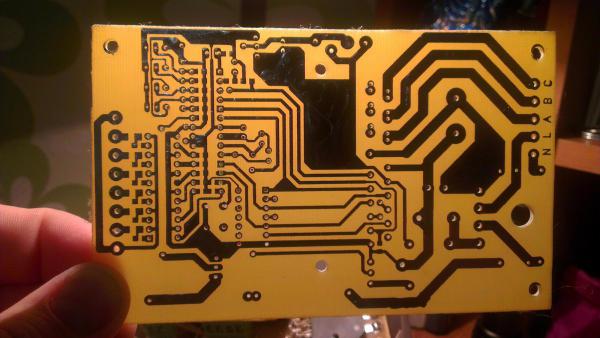
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа) .
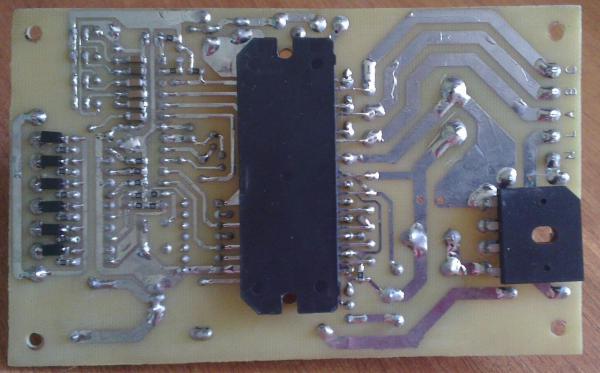
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220в 50Гц). Скорость набора частоты установлена на уровне 15Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200Гц., 1v-40Гц, 1.25v-50Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки маштабирования напряжения DC звена 1в -100в (на схеме R30).
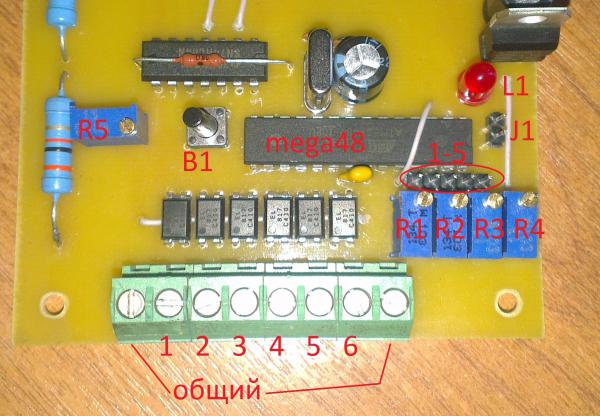
Расположение элементов
Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220В и частотой 50Гц), так и для двигателя с напряжением 380в и частотой 50гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220в 50Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220В — 50Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220В- 30Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15Гц./сек
- Интенсивность торможения 15Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200Гц /220 то резистор нужно выкрутить на максимум; если написано 100Гц/ 220в нужно добиться 2.5 Вольта на 1-ом контакте. (1Вольт на первом контакте соответствует 40Гц); если на двигателе написано 50Гц/400В то нужно выставить 27Гц/0,68 В (например:(50/400)*220=27Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25Гц — 200Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5Гц/сек — 50Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220в 50Гц с вольт добавкой в 10 % .
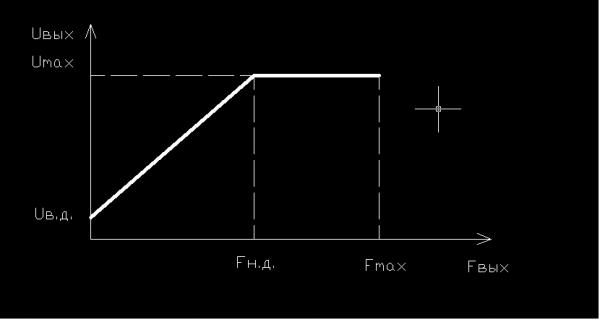
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50Гц , номинальное напряжение 80В, Чтобы узнать какая будет номинальная частота при 220В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50Гц одной фазы (на 3-х фазах зависает комп )
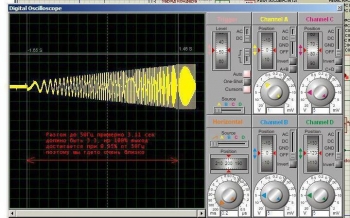
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
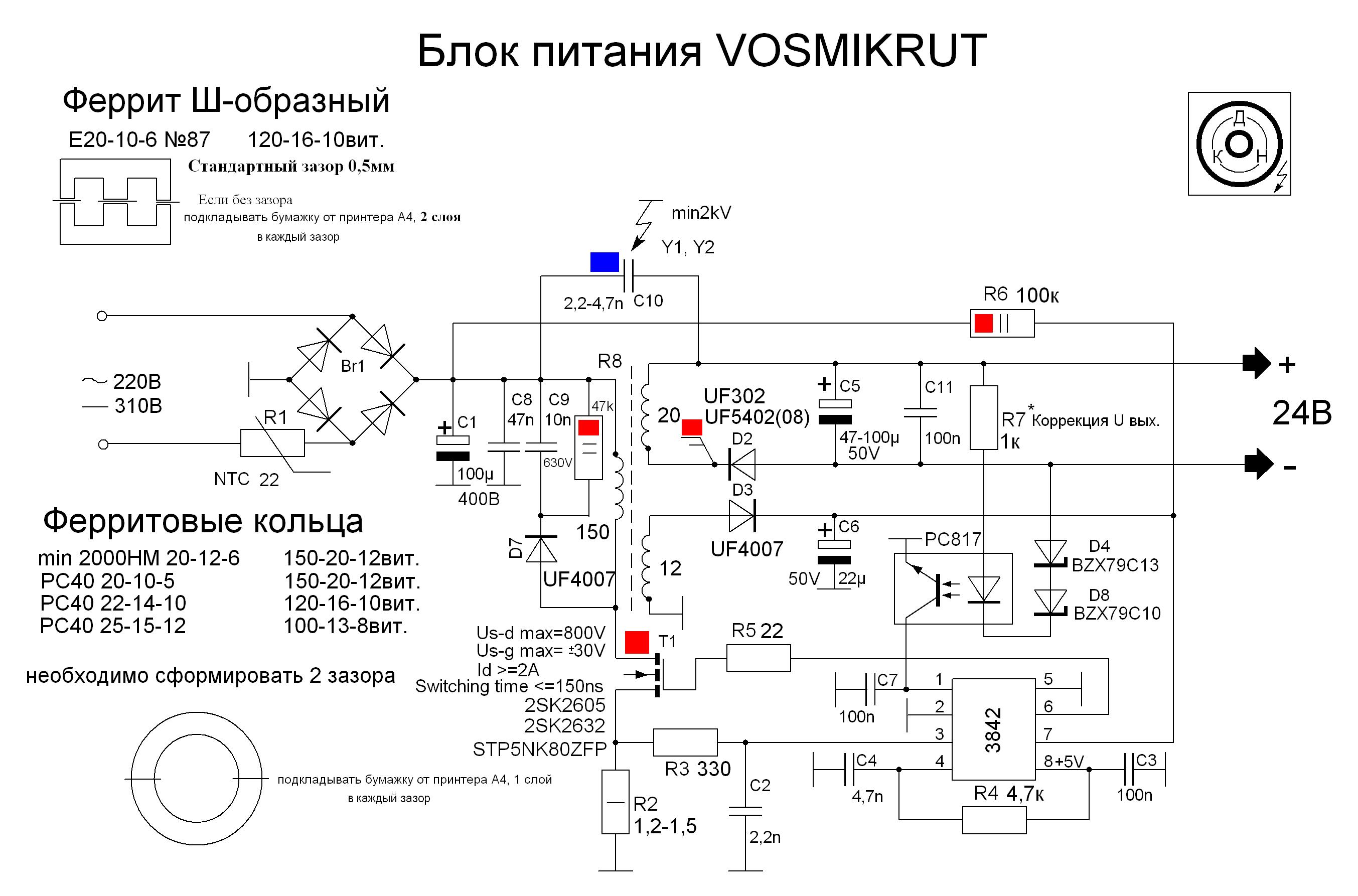
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50Гц 220В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 КВт.
Главное у данного модуля: ток короткого замыкания 140А против 47А, защита настроена на уровне 25А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20МГц, то привод получится 10-400Гц; темп разгона 10-100Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380В 50Гц, а настройки для 220В 50Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
В свободном доступе прошивке не будет, НО запрограммированный контролер ATmega48-10pu или ATmega48-20pu будет дешевле mc3phac. Готов ответить на все ваши вопросы.
Источник



