
Сборка электросамоката своими руками



Сегодня на рынке есть достаточно большое количество заводских электросамокатов и выбрать можно на любой вкус и кошелёк.
Но любой товар как известно рассчитан под усреднённого покупателя.
Один складной и лёгкий, но медленно едет и не стартует с места.
Второй прекрасно стартует и разгоняется, но слишком тяжёл.
Что делать, если хочется самокат именно под свои запросы ?
Варианта два – либо брать заводской и дорабатывать, либо собирать аппарат самому с нуля.
Оба варианта имеют право на жизнь и каким путём пойти – личный выбор каждого.
Я же постараюсь обрисовать каким образом комплектуется набор элементов для самостоятельной сборки.
Главный элемент собираемого самоката это «база».
Базы самокатов условно делятся на подвиды:
Микро – с колёсами до 8 дюймов,
Мини – колёса 8-10 дюймов,
Миди – 12-16 дюймовые,
Макси – от 20 дюймов и больше.
Немного особняком стоят самокаты с широкой, не велосипедной резиной. Рино, Эво, Скрузер и их клоны тоже числятся самокатами, хотя по мощности двигателей и внешнему виду они явно ближе к мотороллерам и скутерам.
Итак база, именно от неё следует начинать плясать.
От выбора базы зависят итоговые ходовые качества электросамоката.
На что в первую очередь следует обратить внимание ?
Размерность колёс, литые или надувные, наличие подвески, место для удобного расположения акб и ширина дропаутов для установки мотор-колеса.
Если в вашем городе зеркальный асфальт который каждый вечер моют шампунем то 5.5 дюймов вам вполне подойдёт.
Если плитка и трещины в асфальте — 8 дюймов это минимум и очень желательна пневматика.
Если ваш асфальт последние лет 10 не знал ремонта – ниже 12 дюймов даже и не смотрите.
Хотите ехать на скорости 40 с хвостиком и не бояться полететь кубарем на неожиданной ямке ? От 16 дюймов и выше.
Подвеска частично снижает удары от неровности на маленьких колёсах, но правило «колесо может переехать препятствие не выше половины своего диаметра» никуда не денется.
Расположение акб. Варианты – в деке, в рулевой стойке, на руле в сумке или кейсе, на багажнике, в рюкзаке.
Некоторые самокаты имеют полость в деке, которая позволяет использовать её для упаковки туда сборки аккумуляторов.
Плюсы – низкий центр тяжести, внешний вид. Минусы – бывает необходима дополнительная защита акб от ударов о выступы дорожного полотна.
В рулевой стойке можно расположить акб, если она состоит из нескольких труб и между ними есть свободное пространcтво. Плюсы – акб ощутимо не влияет на развесовку самоката, при изготовлении облицовки самокат не боится падений. Минусы – трудоёмкость работ.
Также некоторые самокаты имеют крепления для бутылки на рулевой стойке, куда можно прикрутить кейс или акб в «бутылке». Плюсы – простота монтажа, легкосъёмность. Минусы – мешает при езде, при падении можно отломить крепления.
На руле в кейсе можно расположить акб. Плюсы – простота монтажа, легкосъёмность. Минусы – ухудшение развесовки, более ощутимые удары в переднее колесо. При падении есть вероятность разбить корпус.
На руле в сумке как правило делаются акб для маленьких и складных самокатов. Сумка для фототехники достаточная для небольшого акб и не привлекает к себе внимания. Плюсы – простота монтажа, Минусы – риск повреждения акб при падении.
Аккумулятор на багажнике сзади – популярное решение первых электровелосипедов. Для самокатов малоактуально, за счет отсутствия багажника на большинстве из них. Плюсы – простота монтажа, легкосъёмность. Минусы – изменение развесовки, ощутимые удары в заднее колесо.
Также возможно и катание с аккумулятором в рюкзаке и проводом с разъёмом на сам самокат. Плюсы – возможность утеплить акб для использования в зимний период. Облегчение самоката, за счёт чего ощутимо повышается манёвренность и раположенность к активному катанию с прыжками. Минусы – заболевания позвоночника от постоянной нагрузки (зависит от веса акб), изменение развесовки на сторону мотор-колеса.
Это расстояние между посадочными местами в передней или задней вилке самоката.
От выбранной категории базы будет зависеть и посадочный размер мотор-колеса самоката.
Для моделей микро и мини стандарт мотор-колёс 45 или 65 мм. Для того что больше — 100 мм.
Велосипедные мк под переднее колесо как раз также имеют стандарт 100мм.
Бывают мк 110, с тормозным диском, но реже.
135мм это уже велосипедный размер заднего колеса, под шестерни с одной стороны.
Электрическая часть электросамоката довольно проста, 4 пункта – аккумулятор, контроллер, мотор и органы управления.
Раньше аккумуляторы ставились свинцовые, тяжёлые, с низким ресурсом 300-400 циклов и малыми токами заряда-разряда.
Современные электросамокаты ездят на разновидностях литиевых акб – литий-ион, литий-полимер, литий-железофосфат.
Рассмотрим разницу в них.
Литий-полимерные (LiPo) акб имеют выгодную стоимость, высокие токи заряда и разряда, ресурс в 500-800 циклов.
Но пожароопасны. Не рекомендую применять их.
Литий-ион (LiIon) – 500-1000 циклов, малый вес, зависимость от температуры.
Вообще ионок есть три подвида, в зависимости от типа химии. У одних выше ёмкость, но больше внутреннее сопротивление, другие высокотоковые, но ёмкостью не блещут.
Требуют защиты от механических повреждений при применении на самокатах.Бывали случаи возгорания ионок от ударов при падении.
Литий-железофосфат (LiFePo4) – Примерно вдвое тяжелее ионок, дороже. Выдают и принимают большие токи, ресурс 2000 циклов.
Не пожароопасен, довольно стоек к механическим деформациям. Можно разряжать при минусовых температурах.
Привод колеса самоката от внешнего мотора ремнём или цепью еще встречается, но уже явно проигрывает позиции мотор-колёсам.
Мотор-колесо лучший выбор мотора для самосборного электросамоката.
Они бывают двух типов – редукторные и прямого привода. Разберем разницу, плюсы и минусы каждого типа.
Легче чем мк прямого привода той-же мощности, лучше кпд на малых скоростях. Отличный накат, за счёт наличия фривила, что очень полезно при использовании самоката на ножной тяге. Есть изнашивающиеся детали – шестерни, когда-нибудь они потребуют замены. Шум — редуктор подвывает при работе. Невозможность рекуперативного торможения. Немного лучший потенциал форсирования, за счет больших оборотов вращения.
Прямой привод (DD).
Тяжелее редукторников, накат хуже из-за зубцового эффекта. Изнашивающихся деталей кроме подшипников в таких мк нет. Малошумные, а при использовании синусного контроллера могут быть вообще бесшумными. Имеют возможность использовать торможение рекуперацией. Оправдывают себя при использовании самоката в местности с большими перепадами высот и как средство экономии тормозных колодок. При установке мк на мини и микро самокаты бывает что рекуперация – единственный адекватный тормоз на борту.
Контроллер это мозги нашего самоката, от его выбора будет зависеть тяга в горки, способ старта и динамика разгона. Выбор контроллера должен быть сделан по параметрам мотора. Например мотор-колесо имеет параметры: 48V 350W, что это значит ?
Номинальное напряжение мотор-колеса 48 вольт. Никто не запрещает подавать на него меньше, но при этом будет ниже его мощность. Никто не запрещает подавать на него больше, но при этом важно не перегреть мк вкачиваемой мощностью.
Это номинальная мощность данного мк. Как показывает практика номинальную мощность можно форсировать в 1.5-2 раза у DD и в 2-2.5 у редукторников. Для выбора контроллера переведём ватты в амперы – 350/48= 7.3 ампера. На 7.3 ампера оно конечно ехать будет, но довольно печально, поэтому форсируем его до 12-15 ампер для прямого привода и 15-18 для редукторника. На эти токи нам и будет нужно искать контроллер под такое мк.
1 – выключатель питания.
Силовое питание как правило подключено на контроллер напрямую и не разрывается при простое. Выключатель питания отключает слаботочную часть контроллера, подающую напряжение на схему управления. Так как токи там небольшие можно использовать практически любую подходящую кнопку с фиксацией.
Представляет собой ручку газа мотоциклетного типа, или половинчатую или курок газа. Я настойчиво рекомендую выбирать именно курок, так как его легко отпустить в экстренной ситуации, а ручку человек инстинктивно обхватывает плотнее, чтобы удержаться. Имеет по меньшей мере три провода – плюс 5 вольт, земля и выходной сигнал.
3 – Тормозные ручки.
На электросамокаты устанавливаются тормозные ручки с встроенными концевиками, для отключения мотора при нажатии тормоза. Если контроллер имеет активированный режим торможения рекуперацией – он также будет включаться при нажатии любой тормозной ручки. Бывают с встроенными кнопками, с герконами и с датчиками холла. Подключение – масса, выходной сигнал. Для датчиков холла дополнительно подключается + 5 вольт. Иногда для того чтобы не менять штатные ручки устанавливаются отдельные модули с герконами или датчиками холла. Крепятся они на трос, или на корпус ручек.
Итак мы разобрались с общим устройством электрики.
Рассмотрим примеры сборки.

В данном проекте использована база Yedoo Ox,

ячейки акб литий-железофосфат

и мк прямого привода, диаметром 12 дюймов.

Акб разделён на два пака и размещён в деке и в рулевой стойке.


Контроллер закреплён под рулевой стойкой, там он не мешает и всегда обдувается воздушным потоком.

Привод – задний, это удобное решение для подъёма в горки. Акб снизу защищен пластиной алюкобонда 4мм.

Итоговые характиристики самоката:
Акб 16S3P, 52 вольта 9 ампер-час.
Запас хода — 25 км.
Максимальная скорость — 30км\ч.

База — Yedoo Mezeq new.

Акб из пакетов LiFePo4 9 а\ч.

Собраны в корпусе из алюкобонда, который закреплён на багажнике.

Мотор-колесо 350 ватт, редукторник.

Проводка к мк и акб проведена через трубы рамы.


Итоговые характеристики электросамоката:
Акб — 16S1P 52 вольта 9 ампер\час.
Запас хода — 30-35 км.
Максимальная скорость — 36 км\ч.
Третий собранный самокат.

База — Yedoo OX new.

Акб из ионок 18650.

Собраны в кейсе.

Кейс зареплён на руле.

Мотор — редукторник в литом ободе 12 дюймов.

Акб — 13S5P LiIon 48 вольт 11 ампер\час.
Запас хода — 40 км.
Максимальная скорость — 38 км\ч.

База — Yedoo City.

Акб — литий ионки 18650, собраны в рулевой стойке.

Снизу установлена защита пластиной алюкобонда 4мм. На ней же стоит и контроллер.

Сверху изготовлен защитный короб из алюкобонда 3мм.


Мотор — редуторник в литом колесе 12 дюймов.
Источник
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
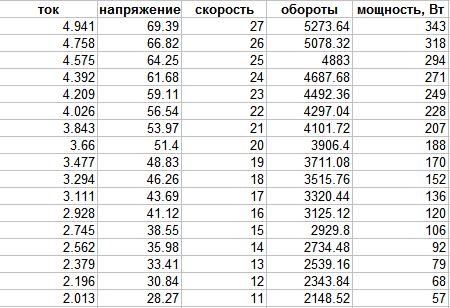
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
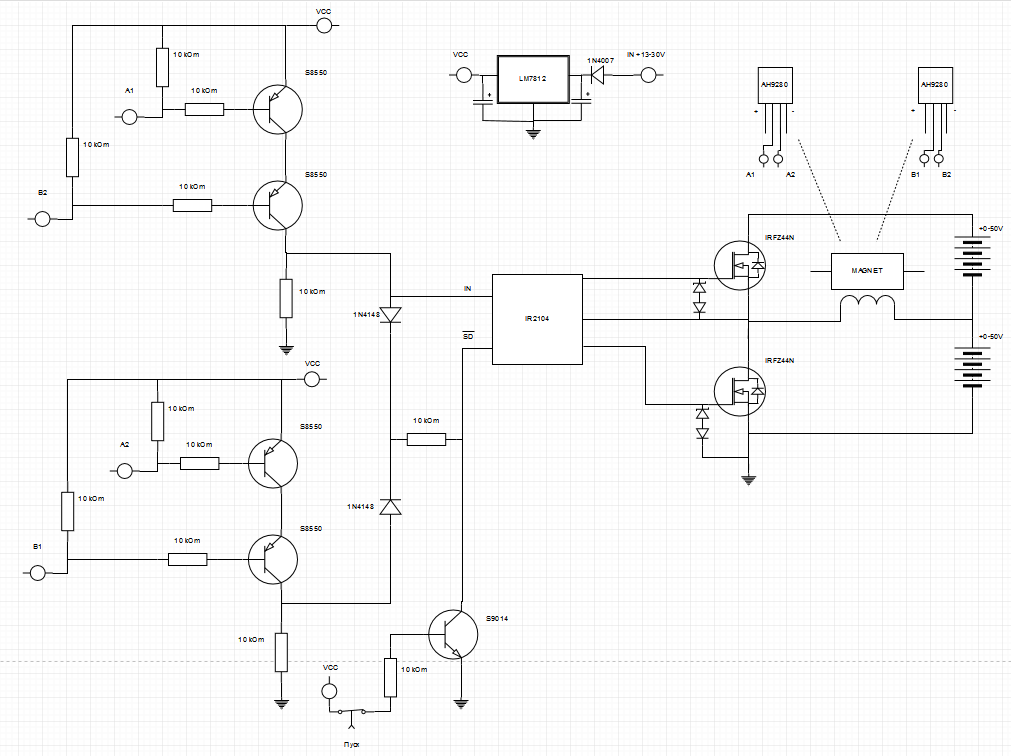
Контроллер
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Источник



