
Самодельный привод штор

В этой статье я расскажу о конструкции автоматического привода штор, установленного у меня на балконе. Там у нас растут цветы, которым вреден прямой солнечный свет. Кроме того, летом, если окна балкона закрыты, при прямом солнечном свете воздух на балконе быстро перегревается. Однако когда прямого света нет, шторы желательно открыть — тень тоже не способствует росту цветов. Поэтому, для поддержания на балконе приемлемой освещенности, я автоматизировал работу штор.
Механика
Шторы изначально уже были на балконе. Их две, обе подвешены на металлическом тросике, протянутом под потолком от одной стены балкона до другой. Понятно, что передвигать нужно сразу обе шторы, при этом из-за трения штор об тросик (он достаточно шершавый) требуемая сила должна быть достаточно велика. Кроме того, иногда на пути шторы могут встречаться препятствия, например, приоткрытое окно балкона, что еще больше увеличивает требования к силе.
Таким образом, привод должен быть достаточно мощным и надежным — на балконе часто бывает повышенная влажность, возможна достаточно большая разница температур зимой и летом. Поэтому основой привода я сделал автомобильный привод стеклоподъемника. Он обладает достаточной мощностью, способен выдавать большой крутящий момент (в него встроен червячный редуктор) и очень надежен.
Схема механической части привода показана ниже:
Подробнее о конструкции. На вале привода стеклоподъемника (слева на схеме) закрепляется пластиковый ролик с проточкой, на который намотан виток веревки. Привод закрепляется на одной из стен балкона. На противоположной стене крепится такой же ролик, через который также пробрасывается веревка.
После этого веревка натягивается, так что трения веревки на ролике привода хватает для перемещения штор. Противоположные концы каждой шторы крепятся к веревке так, чтобы при вращении мотора штора раздвигалась или сдвигалась.
Для проверки работы привода я сделал его уменьшенную модель. Привод стеклоподъемника и независимый ролик закрепил на доске, натянул между ними веревку, после чего можно было проверять работу электроники и измерять силу, развиваемую приводом.
Фотография самого привода на макете: 
Как видно из фотографии, к приводу стеклоподъемника прикреплена достаточно крупная тонкая пластина (я использовал текстолит). К ней крепится металлический уголок с двумя отверстиями, через которые пропущена веревка. Он нужен для того, чтобы виток веревки на ролике не путался, для этого отверстия в уголке сделаны на разной высоте относительно пластины.
Правее уголка — концевые выключатели, нужные для остановки штор к крайних положениях. Для того, чтобы обозначить эти положения, на веревку надеваются две пластиковые трубочки (на фотографии рядом с нижним выключателем видна только одна из них). Трубочки располагаются так, что при достижении шторой крайнего положения одна их них нажимает на выключатель, при этом для надежного нажатия рядом с каждым из выключателей крепится металлическая пластинка, которая прижимает трубочку к выключателю.
Три металлические стойки, прикрепленные к пластине, нужны для крепления крышки привода.
Оба ролика для веревки сделаны из колес для мебели. Используя дрель и напильник, в каждом из них нужно проточить канавку, в канавке ролика привода должны укладываться два витка веревки. Ролик привода крепится на валу за счет натяжения, при этом отверстие в нем пришлось расточить до квадратного, так как вал привода квадратный.
Привод крепится к стене балкона при помощи подходящих мебельных уголков (один из них виден на фотографии слева). В приводе стеклоподъемника достаточно крепежных отверстий, так что проблем с креплением не возникает.
Вид привода, уже прикрепленного к стене и закрытого крышкой: 
Для того, чтобы натягивать веревку, используется специальный винт с гайкой, к которому крепятся концы веревки: 
Также к нему прикреплен конец одной из штор.
Электроника
Управляющая электроника представлена микроконтроллером STM8S. Контроллер выполняет достаточно много функций — измерение освещенности, принятие решения о запуске привода, контроль за положением штор по концевым выключателем, управление питанием привода, управление приводом в ручном режиме — по командам пульта ДУ. Кроме того, к контроллеру подключен радиомодуль на NRF24L01 и шина 1-Wire, по которой подключены три датчика температуры. При помощи радиомодуля можно управлять приводом и считывать значения температуры в разных точках балкона и на улице, однако в данный момент второй радиомодуль подключен только к макетной плате, так что далее этот функционал я рассматривать не буду.
Используемый блок питания от принтера имеет вход для перевода его в состояние Stand-by. Его я тоже использую, благодаря чему уменьшается потребление энергии конструкцией. В программе учитывается, что блок питания переходит в рабочий режим с определенной задержкой, а после 30 секунд бездействия привода блок питания опять переходит в режим Stand-by.
Индикация работы привода — при помощи трехцветного светодиода (используются только синий и красный диоды). Синий загорается при подаче напряжения на двигатель, красный начинает периодически мигать при наличии ошибок в работе привода. Число вспышек позволяет определить номер ошибки.
Для звуковой сигнализации некоторых событий (например, при подаче команды на закрытие уже закрытых штор) используется сам двигатель привода. На него подается ШИМ сигнал с маленьким коэффициентом заполнения, в результате чего двигатель достаточно громко пищит.
В качестве датчика освещенности используется фоторезистор, прикрепленный присоской к окну. Так как присоска может отпасть от окна, рядом с фоторезистором расположена маленькая кнопка. Пока присоска держится на окне, кнопка прижата к окну. Если присоска отпадет, автоматическая работа привода прекращается и начинает мигать красный диод. Если датчик не подключен к разъему, то это тоже обнаруживается контроллером.
Вид датчика освещенности: 
Так как освещенность датчика может резко изменяться — из-за различных вспышек на улице, переменной облачности, то данные от датчика приходится фильтровать. У меня реализован следующий алгоритм обработки: данные от датчика оцифровываются с частотой 10Гц, и записываются в массив. Раз в секунду значение этого массива усредняется (в первую очередь это нужно для фильтрации шумов и вспышек). Далее полученные значения добавляются в другой массив размерностью 600 элементов, после достижения конца массива запись начинается с его начала. Также каждую секунду производится анализ этого массива — контроллер подсчитывает, какой процент элементов массива меньше определенного порога (с ростом освещенности напряжение на выходе фотодатчика падает). Если значения более 66% элементов меньше заданного порога — то считается, что освещенность достаточно велика, и шторы можно закрывать. Таким образом проводится фильтрация периодических изменений освещенности. При этом на частоту работы привода тоже наложено ограничение — в автоматическом режиме мотор включается не чаще раза в десять минут.
Как я упоминал выше, имеется возможность управлять шторами с пульта ДУ. При помощи пульта можно полностью открыть и закрыть шторы, частично открыть их, запустить привод по мгновенному значению освещенности.При управлении с пульта ограничений на частоту работы привода нет.
Также есть возможность программно перезагрузить контроллер.
При передвижении штор контроллер следит за состоянием концевых выключателей. Если после начала движения соответствующий выключатель не сработает в течении 20 секунд, работа мотора прекращается. Чтобы продолжить работу привода после устранения неисправности, как раз и нужно перезагрузить контроллер.
Вся электроника установлена в стандартный пластмассовый корпус: 
Один из выключателей нужен для перевода электроники в автоматический режим работы, второй позволяет полностью отключить питание мотора.
При помощи гнезд Jack 3.5мм к устройству подключаются датчик освещенности, TSOP для приема данных от пульта, и внешние термодатчики.
Белым колпачком закрыт светодиод — так его видно под любым углом.
Вид собранного и установленного на свое место блока электроники: 
Видео работы привода (управление с пульта):
Источник
Автоматические рулонные DIY шторы v2.0
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Этот проект был задуман два года назад, в мае 2018 года, ровно в тот момент, когда я купил свой 3D принтер. Немного ранее я стал интересоваться «Умным» домом. От идеи до первого «запуска» прошёл ровно год, за это время я перечитал тонну статей в интернете. Первый «запуск» произошёл в июне 2019 года.
Первая версия привода была на базе шагового двигателя 28BYJ-48 и драйвера ULN2003 ESP8266 (прошивка от wifi-iot), для рулонной шоры Blackout, купеной в «Леруа Мерлен». Длина 2.0 м, вес 2,5 кг. Штора была куплена в 2014 году и ежедневно поднималась и опускалась «врукопашную». Выбор пал на готовый вариант с Thingiverse, в том числе, из-за наличия прошивки, а также опубликованных автором исходников модели.
Мощности привода оказалось недостаточно. Поскольку штора расположена на застеклённой, но не отапливаемой лоджии, то во время дождей она впитывала в себя влагу и её и так не малый вес значительно возрастал. Как вариант увеличения мощности, было протестировано:
- для 28BYJ-48-5V, поднятие напряжения до 7,5 вольт;
- для 28BYJ-48-12V, поднятие напряжения до 19 вольт.
В обоих случаях был значительный нагрев двигателя, но и был прирост мощности на 20%-30%. По итогу, всё через пару недель было демонтировано и штора вернулась к заводским параметрам.
- если штора была размотана, то приводу не хватало мощности на её поднятие;
- если штора была поднята, то под собственным весом она сама постепенно опускалась, т.е. просто «падала».
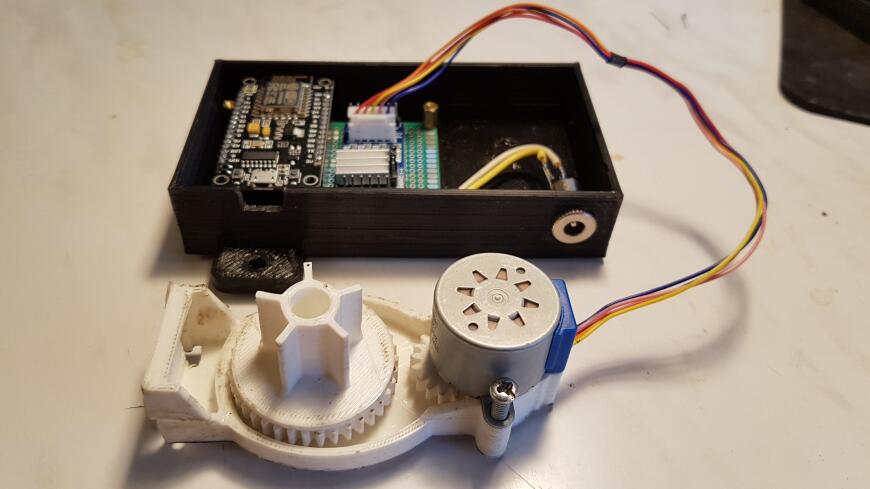
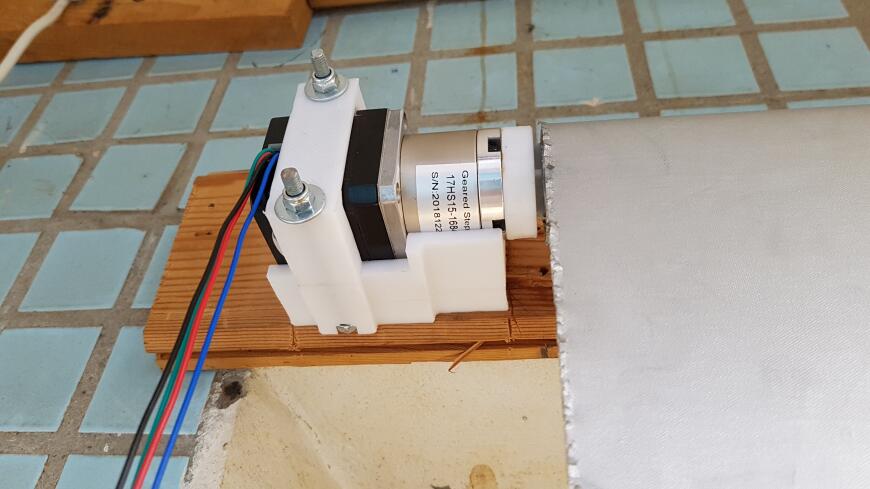
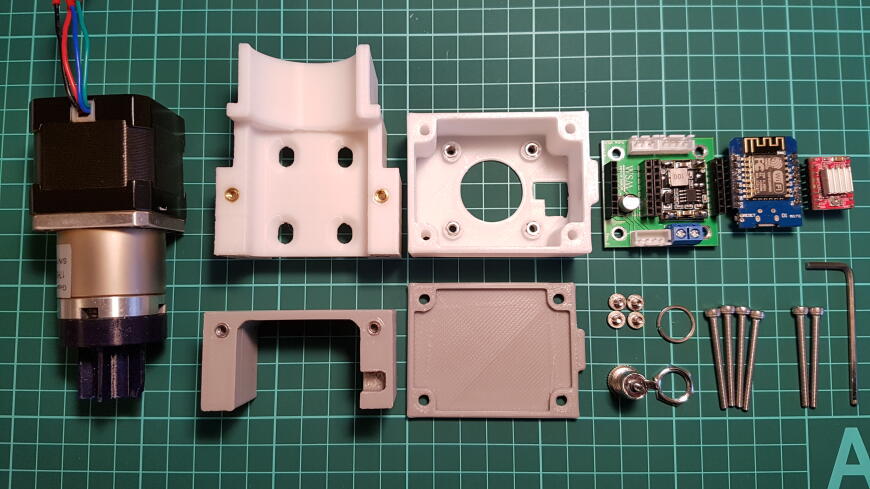
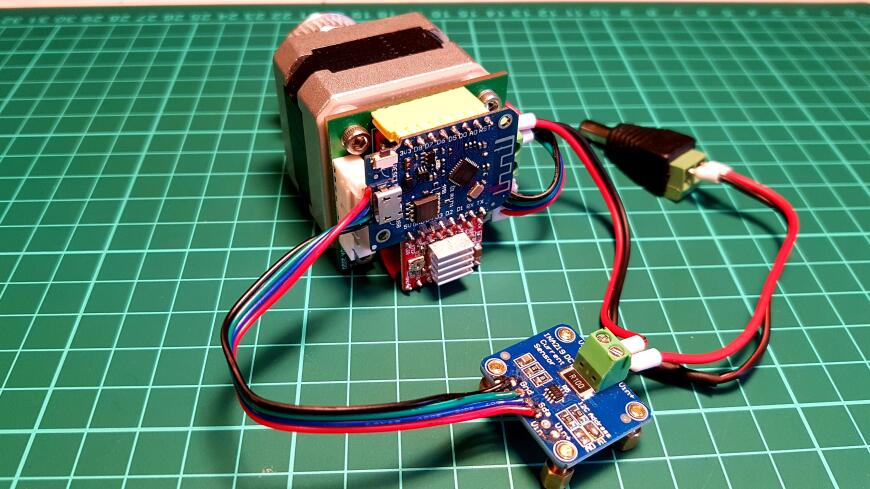
Поняв, что необходимо увеличить мощность, из имеющихся комплектующих была собрана следующая версия, но уже на Nema-17. Также была попытка «изобразить» редуктор, который, по задумке, должен был удерживать штору в поднятом состоянии.


Переход на Nema-17 потребовал новый контроллер управления шаговым двигателем на драйвере A4988. Также в момент проектирования контроллера были протестированы драйверы DRV8825 и TMC2208. Два последних тише, но и дороже, поэтому остановился на A4988.
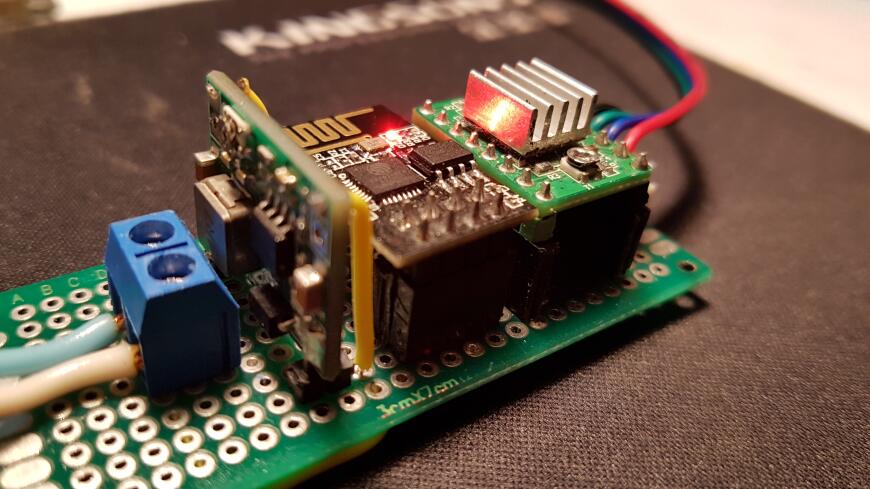
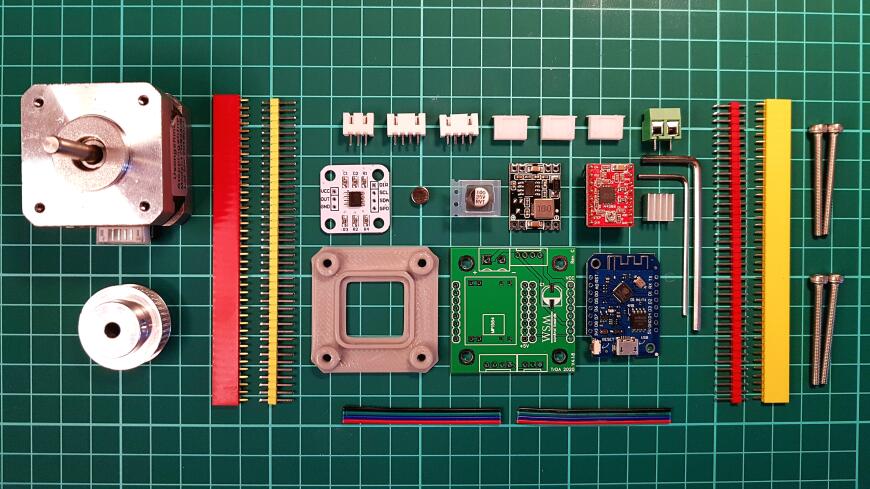
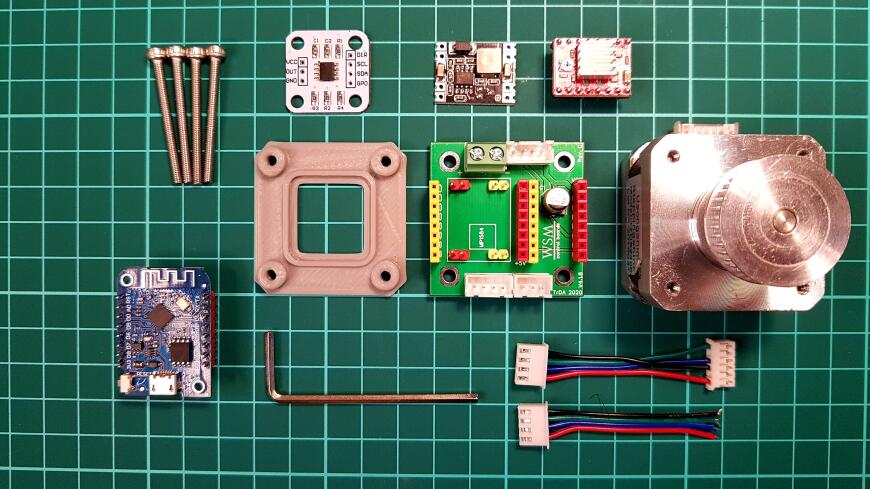
За время проектирования было множество экспериментов и, как следствие, многие компоненты выпустили волшебный сизый дым на котором они работают, тут только некоторая их часть.
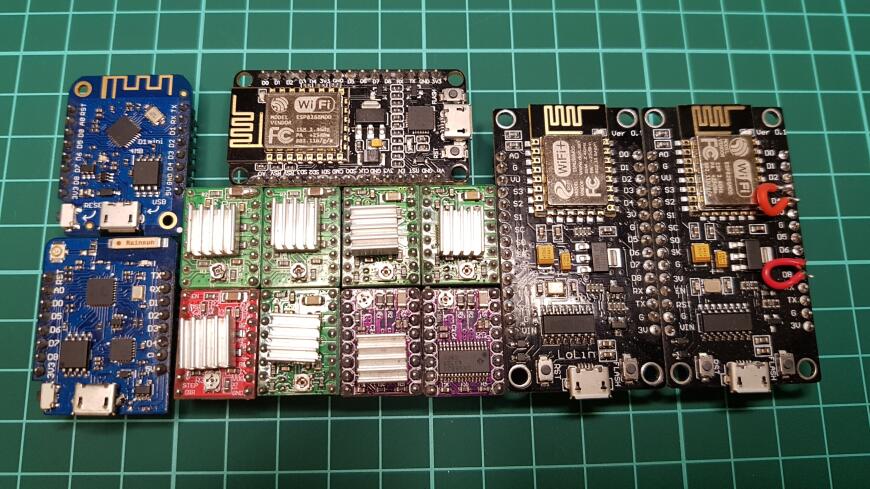
Версий контроллеров управления шаговым двигателем также было множество, были как на «готовых» платах для A4988 с Aliexpress, так и на полностью самодельных макетных платах.

Поскольку пришло понимание, что без редуктора штора будет постоянно «падать», решил использовать Nema-17 с редуктором 27:1, хотя, возможно, хватило бы и редуктора 5:1.
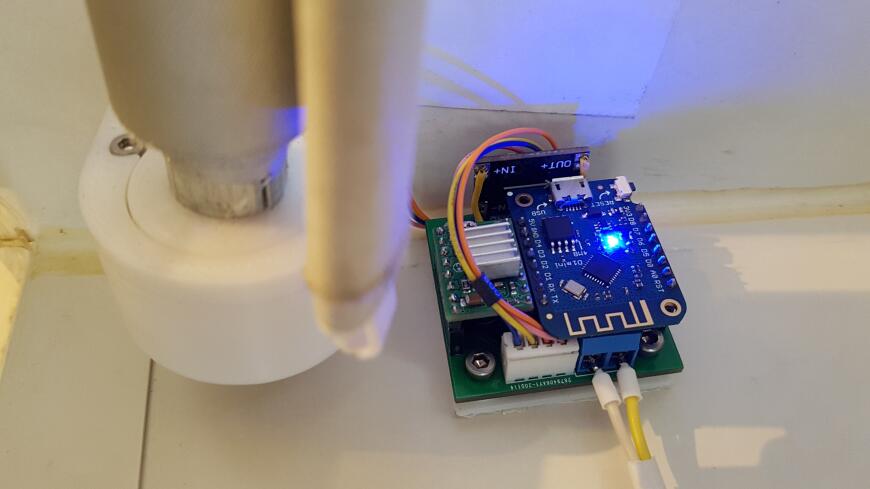
Поскольку я уже получил полностью работоспособную штору на балконе, мне захотелось повторить опыт, но уже со шторой Blackout на Кухне. Длина 1.2 м, вес 1,4 кг. Поскольку Nema-17 я уже освоил, решил добавить в копилку 28BYJ-48 и ESP-01S.
После переделки 28BYJ-48 в биполярный, он заиграл новыми красками, а именно, значительно прибавился крутящий момент, примерно на 40%-50%, естественно, помогло поднятие напряжения:
- для 28BYJ-48-5V, до 12 вольт;
- для 28BYJ-48-12V, до 24 вольт.
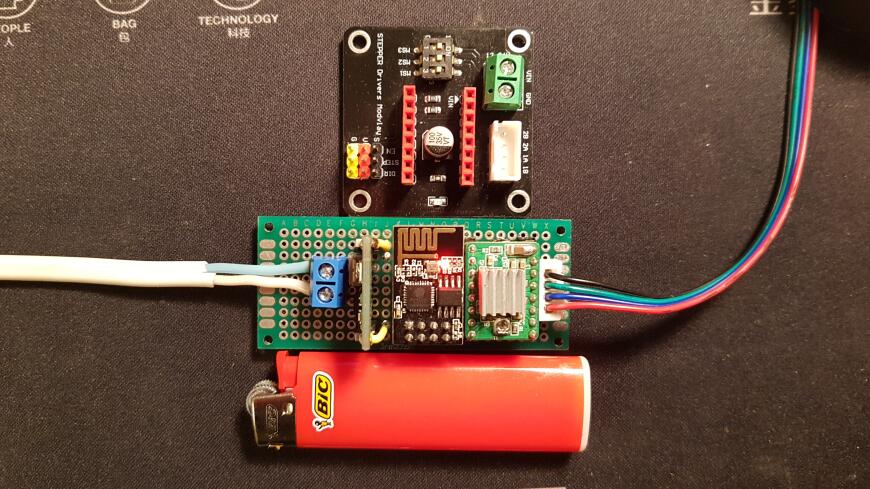
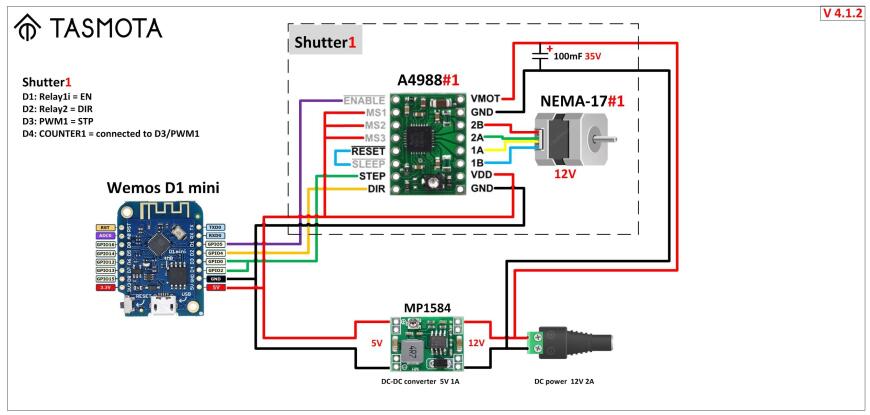
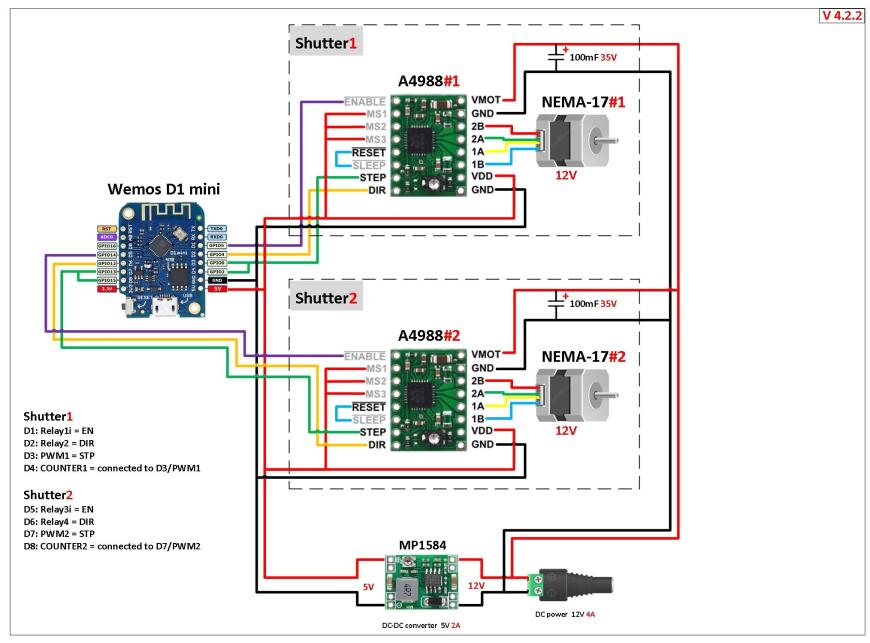
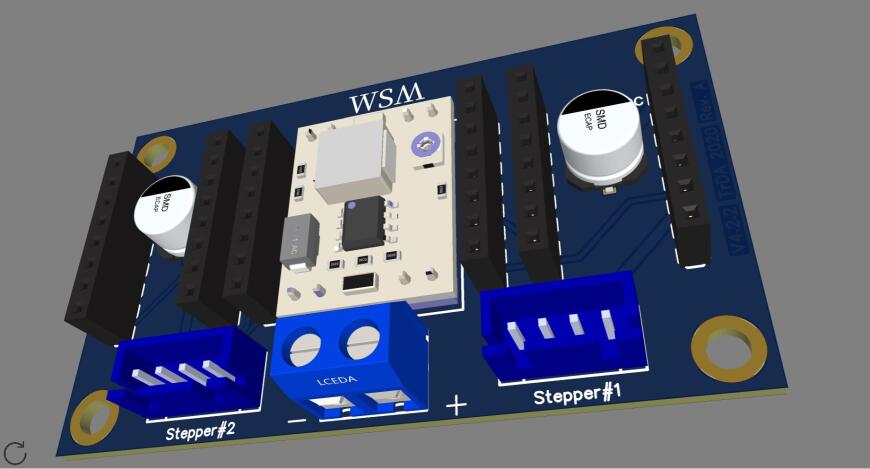
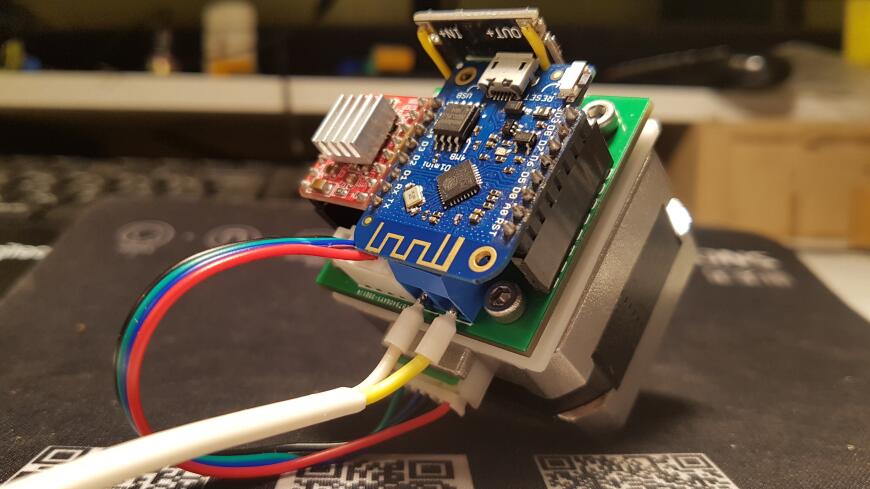
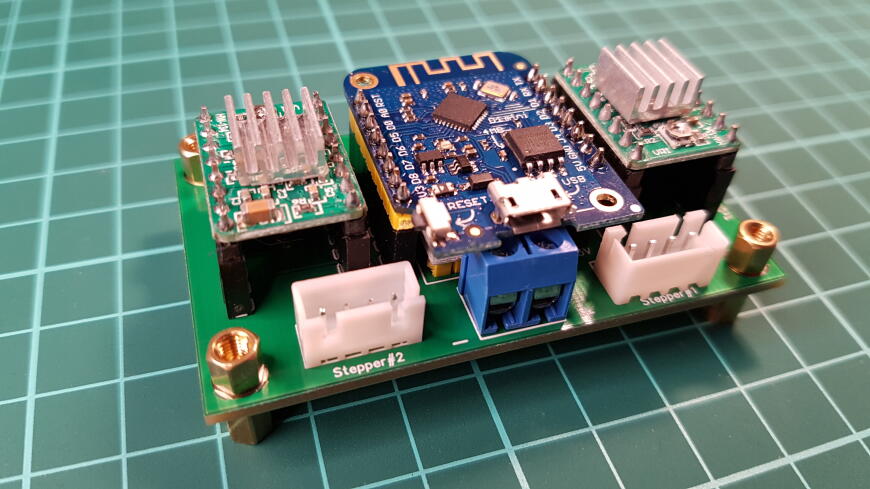
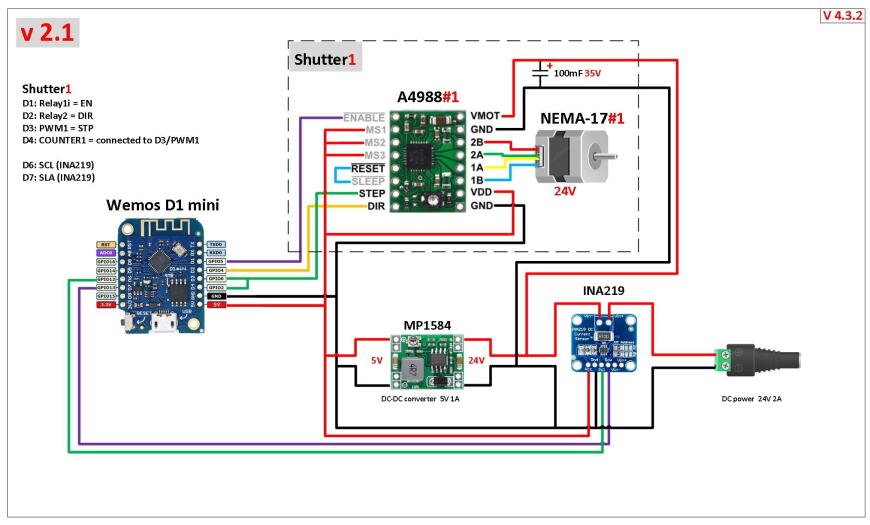
Вариаций на тему было очень много, но, по итогу, остановился на одном, который в дальнейшем просто масштабировал, от управления с одной платы одним двигателем и до четырёх. Поскольку на схемах все компоненты подписаны, думаю нет необходимости их отдельно перечислять.
Отдельно хотелось бы обратить внимание на вопрос питания Nema-17, не вдаваясь в технические дебри. Напряжение 12 вольт — это минимум, намного правильнее использовать напряжение 24 вольта, т.к. мы получаем дополнительный прирост мощности и оборотов двигателя.
Программное обеспечение (прошивка)
Постоянные поиски достойной прошивки привели меня на статью уважаемого Андрея Попова (andreypopov), за что ему огромное спасибо. Благодаря его статье мне конечно удалось избежать некоторых ошибок, но и своих я наделал предостаточно.
В скетче управление двигателем 28BYJ-48, а мне требовалось управление двигателем NEMA-17. Поэтому скетч пришлось немного доработать. После чего я счастливо жил 4 месяца.
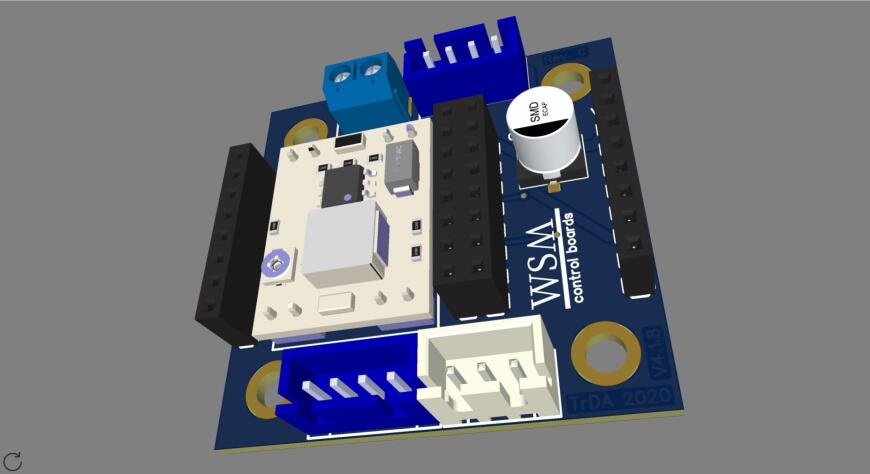
Далее поиски прошивки привели меня на гитхаб Tasmota, где в тот момент сделали первую версию поддержки драйверов A4988. В чате Discord поддержки я выложил схему моего контроллера для A4988 и несколько фотографий, схему далее добавили в первую статью.
И всё закрутилось, мне предложили принять участие, в качестве «тестировщика», в новом варианте поддержки для A4988. По прошествии двух месяцев мной была написана часть новой статьи и нарисованы несколько схем для применения драйвера A4988 (с кратким описанием для каждого).
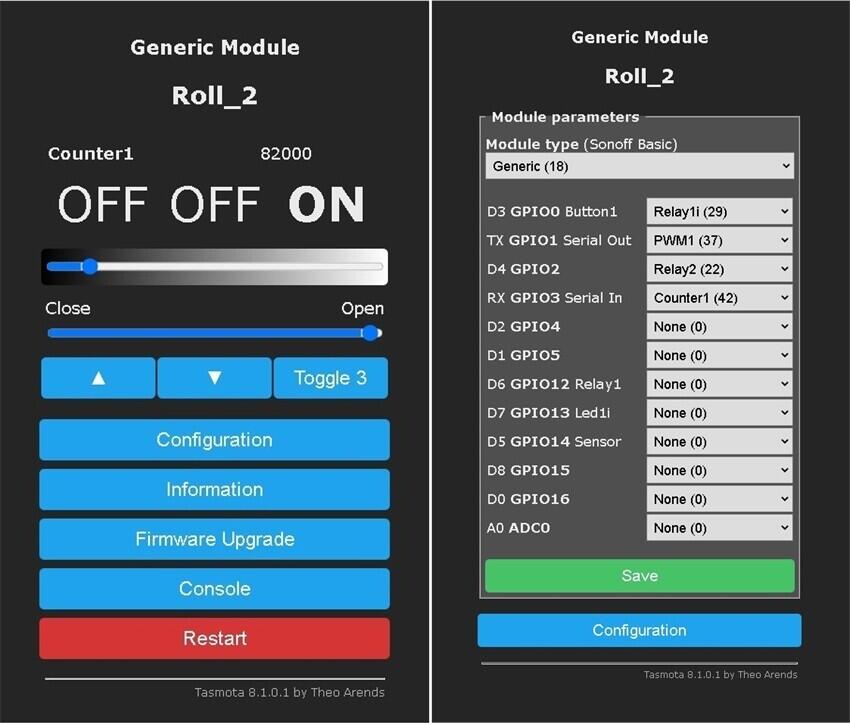
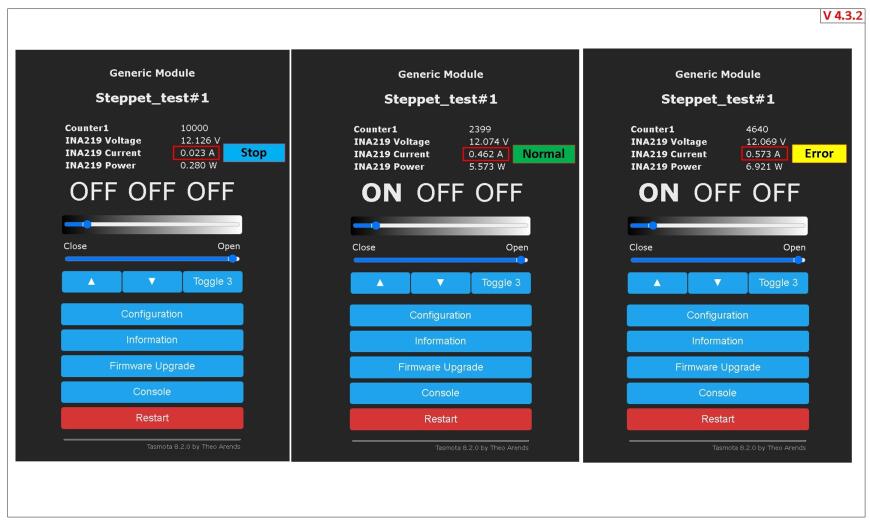
В итоговом варианте я использую прошивку от Tasmota, и переходить с неё не планирую. Всё, что мне нужно от прошивки — это стабильность и управление по MQTT.
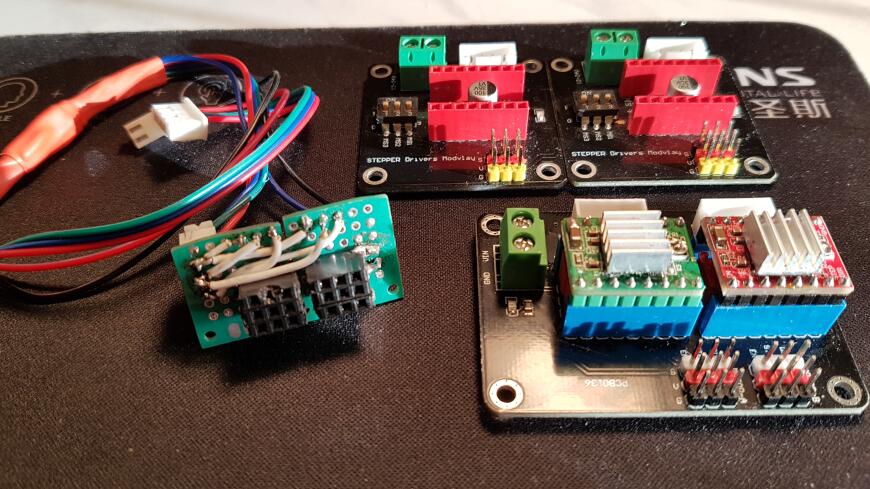
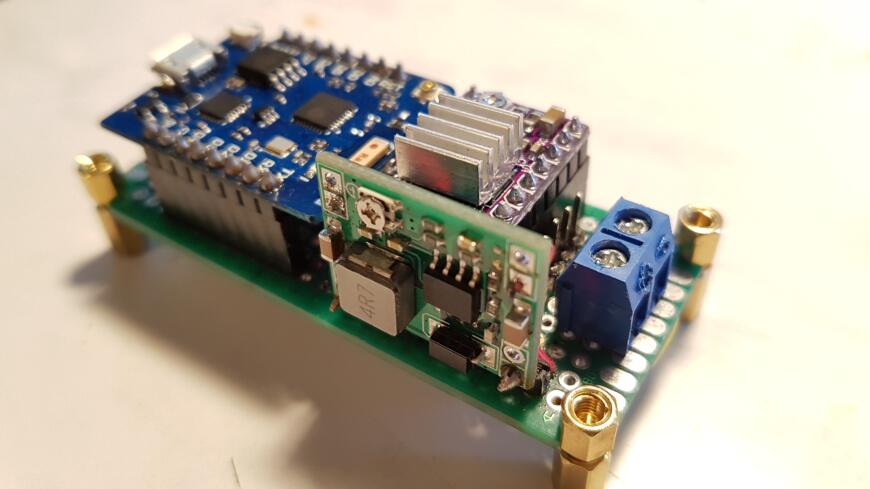
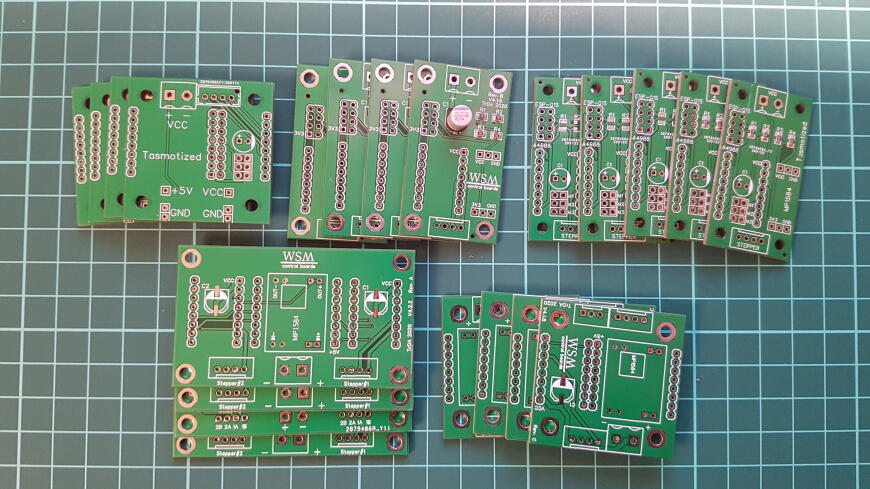
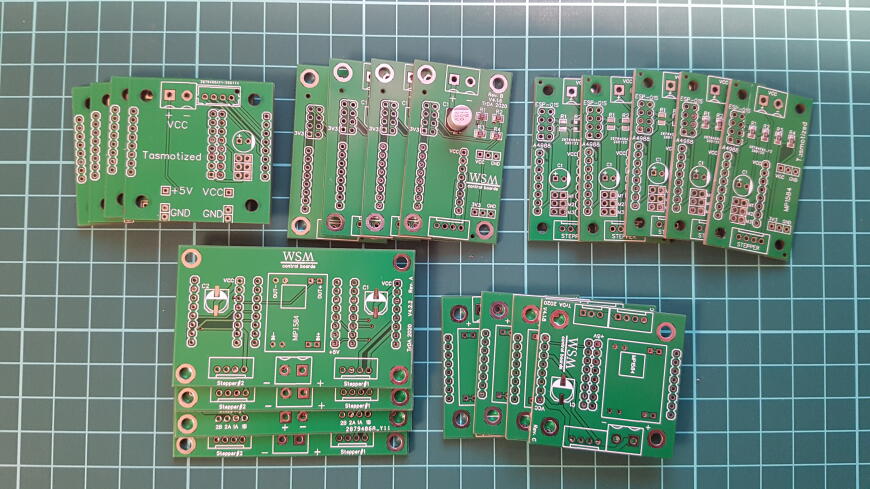
Поскольку мне уже наскучило делать всё на макетных платах, то не долго думая принял решение сделать полноценную плату контроллера. На Easyeda были созданы и заказаны три разновидности платы привода.

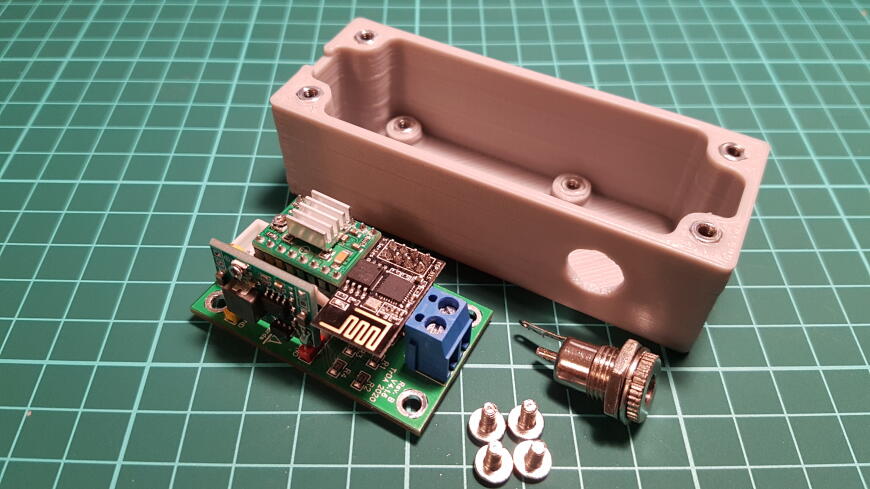
Получив заказанные платы, я принялся за уже привычную по ночам работу — паять в тишине.
 Первый рабочий контроллер на полноценной плате, на котором ставились множественные эксперименты.
Первый рабочий контроллер на полноценной плате, на котором ставились множественные эксперименты.
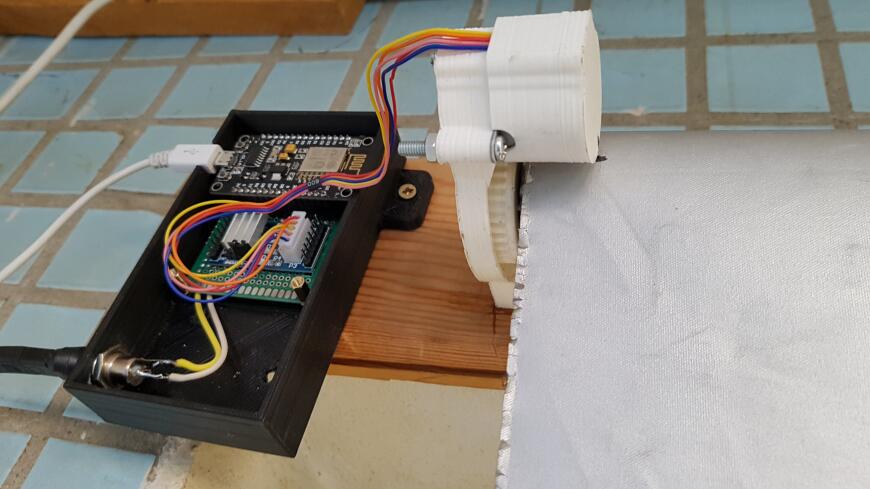
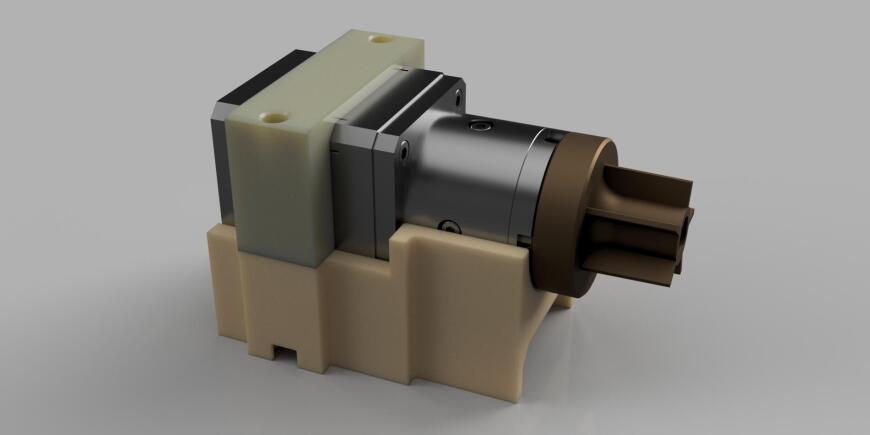
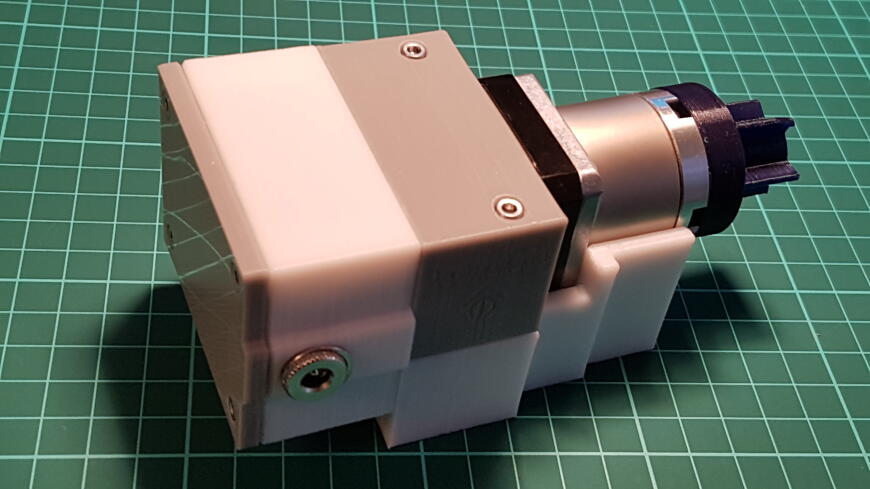
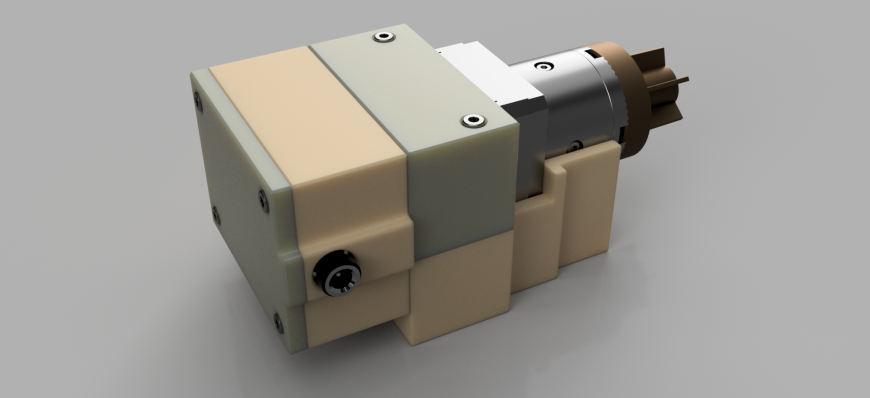
Вдоволь наигравшись, плотно засел за Fusion 360, дабы окончательно решить вопрос со шторой на балконе.
 Ну и войдя во вкус, решил доделать привод на кухне. Дабы не изобретать велосипед, взял за основу готовый проект.
Ну и войдя во вкус, решил доделать привод на кухне. Дабы не изобретать велосипед, взял за основу готовый проект.
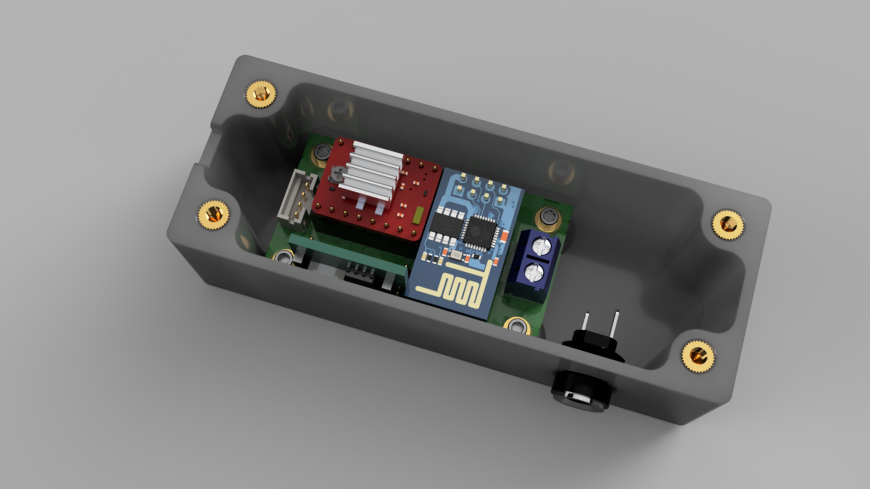
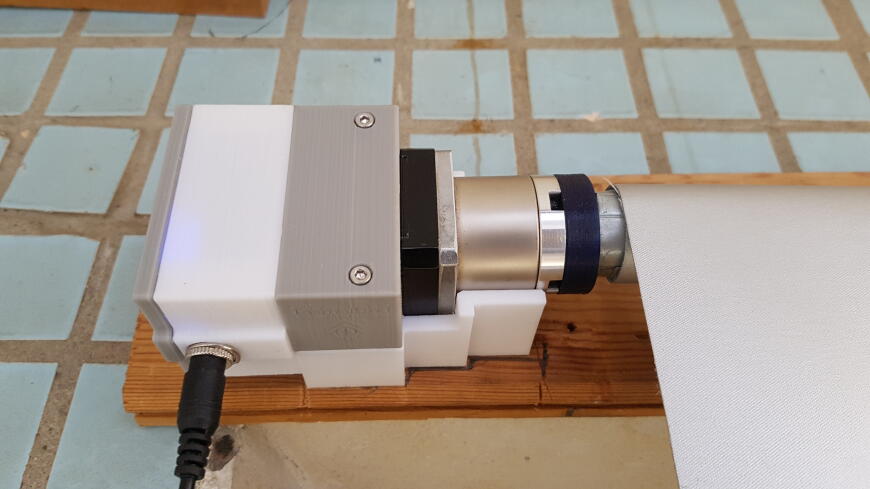
И уже используя полученный опыт, начал делать автоматизацию для двух «карнизных» штор в комнате. Что, собственно, в настоящее время и продолжаю. Осталось спроектировать корпус для платы, и натянуть второй ремень.


Производители готовых комплектов приводов, как например DOOYA или XIAOMI, делают конечно хорошие вещи, но как мне кажется, это немного дороговато. Да и сделать самому намного приятнее, и ещё при этом сэкономив немного.

Ну поскольку, за время экспериментов, шторы мне несколько раз сильно «пожевало» — захотелось минимальной защиты.
Вариант 3.0 (в мечтах)
Изначально мне очень хотелось получать обратную связь от шагового двигателя, т.е. сделать свой серво-шаговый двигатель. Ну и естественно, я начал его делать. Использовал магнитный датчик положения AS5600, и мне даже удалось получить от него данные с помощью прошивки от wifi-iot, а также взяв из описания стороннего проекта готовый скетч.
Но, как обычно, споткнулся о программное обеспечение (ну не программист я, а клавиатуру в лесу нашёл), и не найдя готовой прошивки, отложил проект до лучших времён.
Фактически за один год я получил огромный опыт в 3D проектировании и создании своих плат, а также подтянул навыки пайки.
Поскольку проект изначально планировался как не коммерческий, друзьям я иногда делаю автоматизацию штор, что называется по себестоимости комплектующих, т.е. абсолютно без прибыли для себя.
Все 3D модели, если кто-то захочет их повторить, вместе с исходниками в формате Fusion 360, мной выложены на Thingiverse, найти их там можно просто набрав в поиске мой ник.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Источник



