
Мощный микроконтроллер своими руками
Очень маленькое, но очень полезное устройство.
Автор: ELcat
Опубликовано 31.08.2012
Создано при помощи КотоРед.
Здравствуй, дорогой Кот! Позволь поздравить тебя с Днём рождения и от всей души пожелать рабочего вдохновения, творческих успехов ну и чтоб, как говорится, «всё Коту было Масленица»! А также преподнести тебе очень маленький скромный подарочек. Ой, а где же он? В кармане затерялся? Мяу-миу-рауж… О! Вот же он, «МИРАЖ».

Надеюсь, он тебе понравится и станет твоим верным спутником.

Каждый день мы куда-то торопимся, не успеваем, опаздываем. К сегодняшнему дню человечество изобрело массу всевозможных хронометров. От примитивных песочных и солнечных часов, до сложнейших, основанных на процессах квантовых переходов элементарных частиц, сверхточных атомных. Человечество даже научилось «из времени делать деньги», но, к сожалению, так и не освоило обратный процесс. Одним словом время – это то, чего нам всегда критически не хватает. И особенно для того, чтобы просто, никуда не спеша, свернуться калачиком и от всей души «придавить хорька». Конечно же, данный прибор не «растянет» вам время, но поможет его подсчитать, а значит экономно и с умом его использовать, с пользой для себя и окружающих.
Итак, что же за хронометр сегодня у нас? Идея систем отображения с механической развёрткой, отнюдь, не нова. Данные часы были разработаны чуть больше полугода назад, когда один из приднестровских котов опубликовал здесь свою статью с подобным прибором. Целью моей разработки было создать некое совершенное во всех отношениях устройство подсчёта времени, основанное на подобных принципах, но лишённое всех недостатков модели приднестровского товарища. Во избежание «переноса недостатков» как принципиальная схема, так и программный код разрабатывались с нуля. Да и не было желания «ковыряться» в чужом коде, хотелось разработать что-то своё, новое и совершенно отличное. Так, после двух месяцев творческих поисков и двух неудачных образцов появился «МИРАЖ». Уникальность данного устройства счёта времени заключается в его неимоверной простоте, дешевизне и столь модных сегодня минималистических тенденциях. Как говорят: «Всё гениальное должно быть просто!». Но, не смотря на это, данный хронометр умеет считать секунды, минуты, часы, числа, месяцы, годы, вычисляет дни недели по дате и добавляет по дню в високосные годы. Кроме того этот «малыш» довольно точен и экономичен. За полгода его работы уход времени составил не более двух минут, а элемент питания до сих пор не требует замены.
Из чего же он состоит? «Сердцем» устройства является излюбленный посетителями данного сайта 8-ми битный Flash микроконтроллер фирмы Atmel – ATmega8. Секрет сверхнизкого энергопотребления устройства заключается в том, что большую часть времени МК, как и положено всем порядочным котам, «дрыхнет»! Причём столь глубоко, что его ток потребления составляет при этом немногим более 8мкА! «А кто же тогда время считает?» – спросите вы. А всё дело в том, что в его составе имеется хитрый таймер-счётчик TC2, имеющий в своём составе независимый генератор тактовых импульсов с предделителем и возможностью подключения внешнего кварцевого резонатора. Вот он-то как раз и считает генерируемые генератором импульсы с частотой 32 786Гц, которая задаётся внешним опорным «часовым кварцем». Один раз в секунду происходит переполнение таймера и по данному событию он формирует сигнал прерывания, способный «разбудить» вычислительное ядро микроконтроллера. При пробуждении запускается внутренний калиброванный RC-осциллятор с делителем на 8, от которого и происходит тактирование ядра частотой порядка 1,2 МГц. При этом ток потребления скачком возрастает до полутора миллиампер. Ядро производит математические действия и снова уходит в спящий режим. Переполнение таймера – не единственное условие для пробуждения МК. Это также происходит и по нажатию кнопки «Wake». При этом МК в течение 5 секунд не уходит в спящий режим, ожидая действий пользователя, и выполняя алгоритмы пользовательского интерфейса. Если по истечению 5 секунд никаких действий не последует, МК снова уйдёт в режим сна.
Как пользоваться данным устройством? Элементарно! Держите устройство в руке горизонтально батареей к себе. Кратковременно нажмите кнопку «Wake» и начните совершать взмахи влево-вправо с частотой от 3 до 5 взмахов в секунду. Перед вами появится «виртуальное табло» с отображением текущего времени.

Ещё одно кратковременное нажатие, и на «табло» появится текущая дата.


И, наконец, эмблемка «МИРАЖ».

Для установки времени необходимо в режиме отображения времени нажать и удерживать не менее 2 секунд кнопку «Wake» до засвечивания нижнего светодиода. При взмахах появится:

Каждое кратковременное нажатие будет увеличивать отображаемый параметр на единицу. Ещё одно нажатие с удерживанием переключит в режим установки минут:

Отображаемый параметр изменяется аналогично. Следующее нажатие с удержанием сохранит установленное время и переключит в режим отображения времени. Если вы не желаете сохранять установленное время – просто не производите с устройством никаких действий в течение промежутка времени длительностью не менее пяти секунд. Устройство без сохранения перейдёт в спящий режим.
Аналогично устанавливается и дата. Необходимо перейти в режим отображения даты, далее нажатием с удержанием войти в режим установки даты. Далее производятся действия, аналогичные описанным выше как и при установке времени:



Ну чтож, без внимания остался лишь самый загадочный элемент устройства – это «датчик взмахов». Для удобства назовём его «акселерометр», хотя это и не совсем корректно.

Данный компонент изготавливается вручную. Для этого вам понадобятся напильник, паяльник, шило, кусачки-бокорезы ну и, конечно же, пара не очень кривых рук. За основу корпуса берётся планка штыревая типа PLD-80. От неё очень аккуратно откусываются 2 отрезка по 8 штырей. Все штыри вынимаются. В результате получается 16 штырей и 2 пластиковые детали. Далее 4 штыря изгибаются под прямым углом с отступом около 2мм от края и вставляются в одну из пластиковых деталей со стороны без углубления (см. фото).
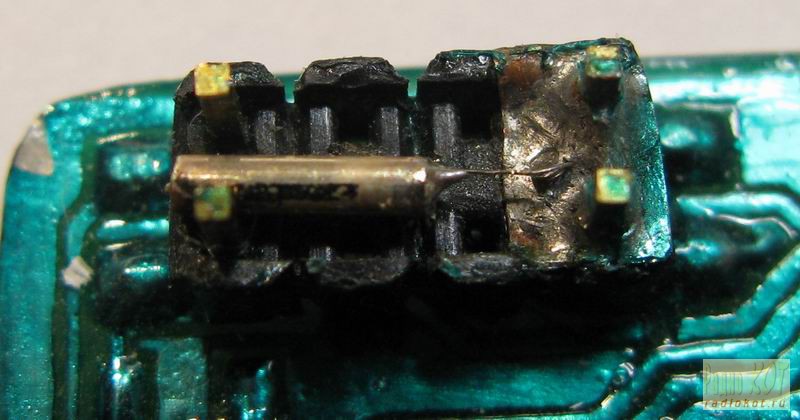
Из тонкой медной жести вырезается маленький прямоугольник, прокалывается шилом в двух точках так, чтобы при помощи полученных отверстий надеть его на одну из пар штырей. Надевается до упора, вдавливается, облуживается и припаивается к штырям.
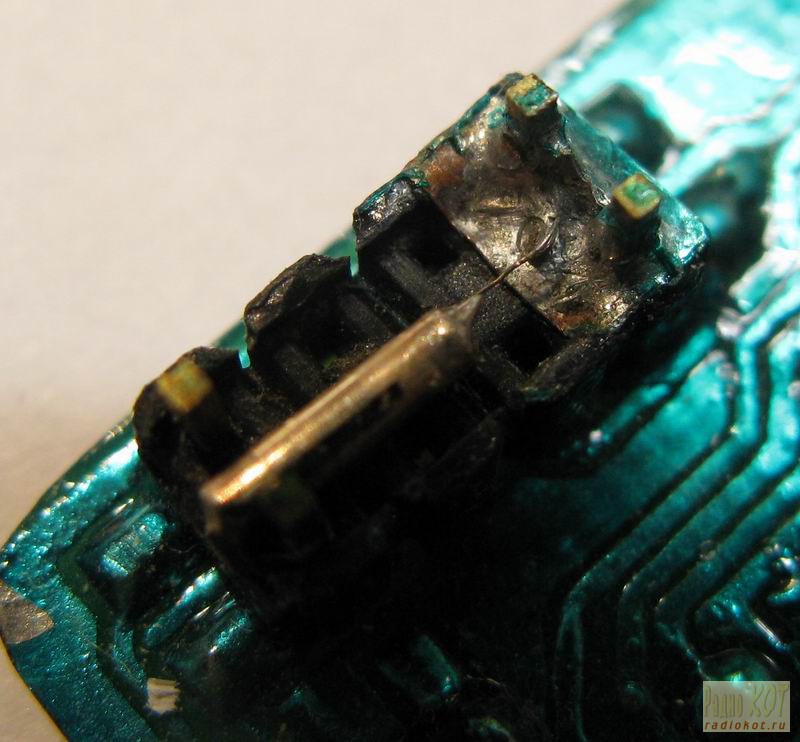
Сам чувствительный элемент «акселерометра» представляет собой грузик-контакт удерживаемый пружинкой. Под действием сил, вызванных ускоренем, он должен свободно двигаться между двух штырей-контактов и быть подпружиненным к контакту, расположенному по направлению взмаха, то есть влево, если представить плату в руке (на фотографии нижний справа).
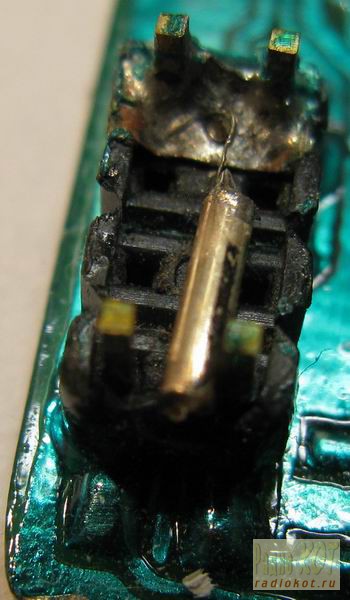
В качестве грузика используется кусочек медной или латунной проволоки сечением около 1,5мм с золотым или серебряным покрытием – идеально подходят кусочки контактов некоторых старых «совковых» разъёмов. В качестве пружинки применена струнка, выпаянная из оптической головки лазерного CD/DVD привода. На таких струнках подвешиваются подвижные пластиковые рамки с обмотками и микролинзами. Пружинка должна иметь 1-1,5 витка (подбирается экспериментально), навивается на оправке диаметром около 1мм (вывод какого-нибудь выводного элемента с соответствующим сечением). Одним кончиком пружинка припаивается к грузику, на другом формируется «петелька», которая припаивается к медному прямоугольнику. Далее на штыри надевается вторая пластиковая деталь углублением вниз, образуя таким образом «крышечку коробочки» со всей «механикой» внутри. Далее «крышечку» необходимо снять, аккуратно подгибая пружинку тонким пинцетом, необходимо добиться, чтобы груз не касался верхней или нижней стенки коробочки, а был слегка прижат к левому контакту («крышечка» для проверки периодически устанавливается на место). Таким образом в собранной конструкции при взмахах грузик будет ударяться только о боковые штыри-контакты.
После регулировки и сборки верхние выступы штырей обкусываются кусачками и стачиваются напильником. Далее акселерометр ставится всеми четырьмя контактами на напильник и производится стачивание контактов до толщины не более 0,3-0,5мм, после чего он готов к пайке на плату. После пайки акселерометр необходимо самым тщательным образом промыть средством для удаления флюса и грязи. При определённой сноровке пластиковые детали корпуса также можно очень сильно утонить, получив акселерометр почти крохотных размеров.
Жёсткость пружинки и сила прижима грузика окончательно доводятся после сборки и прошивки устройства по корректности развёртки изображения. При очень мягкой пружинке левая или правая сторона растра «сминается», при слишком жёсткой акселерометр перестаёт реагировать на взмахи, растр появляется не при каждом взмахе или не появляется вообще.
Номинал резисторов R1-R8 выбирается в соответствии цвета устанавливаемых светодиодов (точнее от заявленного напряжения их переходов). Для синих, белых, и ultra bright зелёных – 8-16 Ом, для красных, жёлтых и зелёных обычных – порядка 47-56Ом. Также хочу обратить ваше особое внимание на то, что микроконтроллер ATmega8A-AU по ряду его архитектурных особенностей в данной конструкции не применим. Устройство будет корректно работать только с МК ATmega8-16AU и ATmega8L-8AU.
Также напомню об обязательном соблюдении правил антистатической безопасности при работе с микроэлектроникой. После сборки и монтажа не забывайте тщательно мыть платы специализированными средствами для удаления флюса и грязи. Перед включением проверьте плату на наличие непропаев, обрывов и закороток. Готовую плату можно покрыть лаком, например «Цапонлак» или «Plastik». Следите, чтобы остатки паяльного материала и лак не попали в акселерометр.
Всем желаю удачи, хорошего настроения и побольше свободного времени!
Фузы, прошивка и плата(SL5.0) находятся в архиве.
Источник
Микроконтроллер своими руками
Пытаясь освоить контроллеры и уже владея навыками программирования ПЛИС, мне пришла в голову дурная мысль. Пришла, постучала и вошла. Всем тем, к кому приходят дурные мысли, и кому интересно как с этим явлением справляются другие, посвящается.
Возникла идея нарисовать свой контроллер, не ограниченный по количеству периферии, ОЗУ и другим параметрам, кроме ёмкости ПЛИС. Скажем контроллер содержит 5 UARTов, а позарез нужен шестой, придётся изворачиваться. А зачем, если можно просто щёлкнуть мышкой и добавить необходимое? Или наоборот, задачка хорошо решается на пяти контроллерах с разрядностью 5, 32, 20, 32 и 20 с непредсказуемым количеством линий связи между ними. Жалко использовать пять 32 разрядников, ресурс всегда жалко, а совмещать две подзадачи на одно ядро – некрасиво, что ли.
Время отклика на прерывание в контроллерах достаточно велико. Да, контроллер прерываний мониторит входы (почему-то ограниченные по количеству) независимо от ядра. Но прежде чем начать выполнение кода программы по обработке прерывания, скажем, читать порт, требуется сохранить регистры общего назначения, а затем их ещё и восстановить. А это не один такт на пустое с точки зрения логики программы переписывание регистров в стек и возврат этих же значений обратно. Оно конечно вписывается в понятие реального времени, но ведь можно же делать это мгновенно: выполнялся код с низким приоритетом, на следующем же такте по причине резкой необходимости начинает выполнятся высокоприоритетное прерывание по таймеру, а через такт выполняется код по обработке внешнего потока данных, ибо там совсем всё быстро надо.
Конечно, все эти проблемы надуманы и решаются и легко и просто. Но дурная мысль не ищет таких решений, она просто бродит в переполненном пространстве сознания и подталкивает сделать нестандарт. А, если у молодого инженера отпуск, то прости жена и дети, но папа не «опять сидит за компьютером», а профессионально растёт. Тем более иногда хочется выполнять не кем-то придуманные задачки, а свои, полностью свои.

Рис. 1. Таймеры. Добавляй сколько хочешь. Обратите внимание на грамматическую ошибку. Стыдно, но не хочется Builder устанавливать для перекомпиляции.
Разрешите представить вам контроллер, архитектура которого, не то чтобы отличается от всех прочих, скорее она не принята на вооружение. Уже давно забыт список прочитанной перед началом работ литературы, использованы мысли многих людей из разных компьютерных эпох, простите меня мои забытые учителя. Зато вам не придётся от меня открещиваться. Да и денег это не пронесло, поэтому и делиться нечем.
Сразу скажу, что контроллер состоялся, прошит в Спартаны всех поколений и успешно трудится на просторах СНГ и одной стране Прибалтики. Сейчас бы многое было сделано по другому, но любые изменения мне уже ленивы и, что случилось, то случилось. А случилось вот что.
— Разрядность контроллера от 1 до 32, со знаком или без оного. (Не помню проверял ли я работу на малых разрядностях). Используется дополнительный код.
— Количество портов ввода/вывода ни чем не ограничена, разрядность ограничена разрядностью ядра.
— Количество таймеров так же не ограничено. На каждый таймер можно установить свой обработчик прерывания.
— Обработчик прерываний с бесконечным количеством входов, каждый вход имеет приоритет от 0 до 99 (ограничение по причине «и так большого числа»). Возможность запрещать все прерывания или низкоприоритетные только.
— Количество последовательных портов типа UART неограниченно, разрядность ограничена разрядностью ядра.
— Делитель частоты сделан плохо и неправильно, но исправно выдаёт любую частоту для любой периферии или просто наружу контроллера.
— Сопроцессор. О нём ниже.
То есть мы имеем контроллер, поддерживающий основные операции арифметики и прочего изменения битов в словах (плюс, минус, сдвиг, побитовая логика. ). Так же он обращается к внутренней памяти и хранит код программы так же внутри себя. Память используется блочная, именно она является платформозависимой и в настройках программы обязательно нужно указать какая микросхема будет носителем контроллера. Все операции по любому направлению действий выполняются за один такт, это может и не всегда хорошо, но упростило проектирование архитектуры. Исключением является целочисленный делитель, функции которого реализованы в сопроцессоре, деление выполняется медленно, но уверенно. Алгоритм деления был выбран самый простой – побитный.
Хотелось бы рассказать про код команд, но сам не помню из чего он состоит. Исходя из принципа «не использовать то, что не используется» даже длинна кода команды является величиной не константной, тем более его содержимое. Скажем, если в компилируемой программе встречается 14 команд, то каждая команда кодируется 4 битами, если используется 18 команд – выделяется пятый бит. Плюс к каждой команде добавляется бит длинны, если он равен 0, то команда одинарная, если 1 – двойная, или наоборот, это не важно. Двойная команда нужна для операций, содержащих адрес ОЗУ или ПЗУ. Добавим к этому то, что шины адреса так же имеют не константные длины, и получим полный бардак в коде команд, рассматривать его никаким дизассемблером смысла нет, как собственно и ассемблер в этом контроллере.
Форт – вот тот язык, который позволил мне реализовать эти странные идеи. Форт прост и низкоуровневый. Писать компилятор данного языка – одно удовольствие. Ну, конечно, все конструкции языка не поддерживаются, только основные по пересылке данных и их изменении.
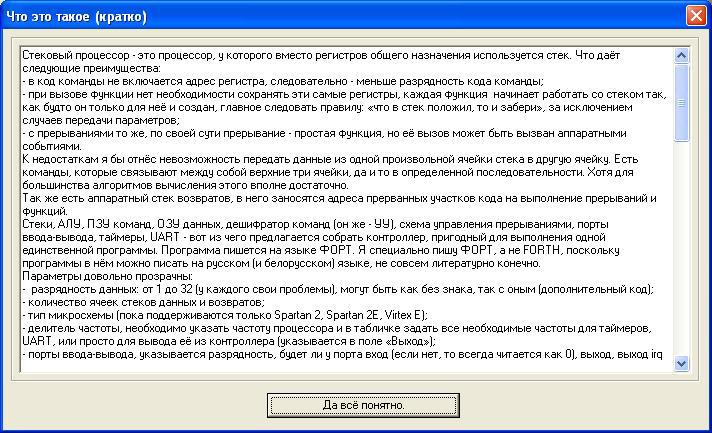
Рис. 2. Руководство достаточно скромное. Нескромное так и не написано.
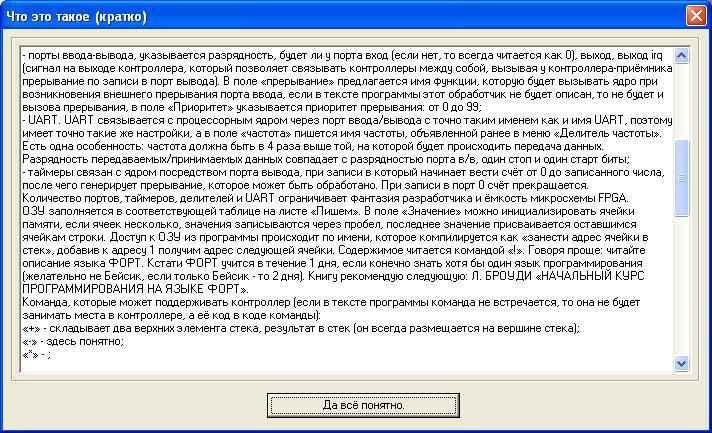
Рис. 3. Вторая часть руководства. Не знаю почему, но окно расширить нельзя. Есть ещё и третья часть, но уж совсем скучная.
И, естественно, мы имеем стековый контроллер. То есть Форт функционирует в своей естественно среде – в стеке, в аппаратном стеке, а не медленном программном. «Всё за такт!» — второй девиз проекта. Аппаратный стек позволил при переходе в функции или вызове прерывания сразу приступать к выполнению команд обработки данных, без необходимости сохранять контент прерванного процесса. «Новые» данные просто помещаются в стек сверху, «старые» уходят в глубь и прекрасно там сохраняются. Затем «новые» данные, поучаствовав в разных операциях, благополучно переходят в ОЗУ или другие места, а «старые» выталкиваются на вершину. При возврате в прерванный участок кода никто ничего не заметит. Адрес прерванного кода сохраняется в другом стеке, и максимальное количество прерванных процессов зависит только ото глубины Стека Возвратов. Это величина настраивается при компиляции, хоть бы и «очень большое число». Параметры в функции передаются так же через стек.
Stackcpu – именно так и называется контроллер, почему-то латиницей, хотя писать код можно и кириллицей. Что я и делаю, приведу пример функции «меняем_биты_в_слове»:
Где: «читаем_из_нужного_порта», «меняем_прочитанное_из_нужного_порта», «записываем_в_требуемую_ячейку_памяти» — функции, выполняющие определённые действия.
Ну не псих ли я красиво ли? Приведу ещё доказательства, программа управления светофором:
Ну что, псих красиво? Третий принцип проекта: «Литературный язык в управление электроникой!» Хотя, как показала практика, писать так программы довольно утомительно. Для знатоков Форт сообщу, что точку мой компилятор воспринимает как разделитель, и запятую тоже. Конечно, лучше использовать язык С, но компилятор С мне не по зубам, а использовать сторонние компиляторы архитектура не позволяет.
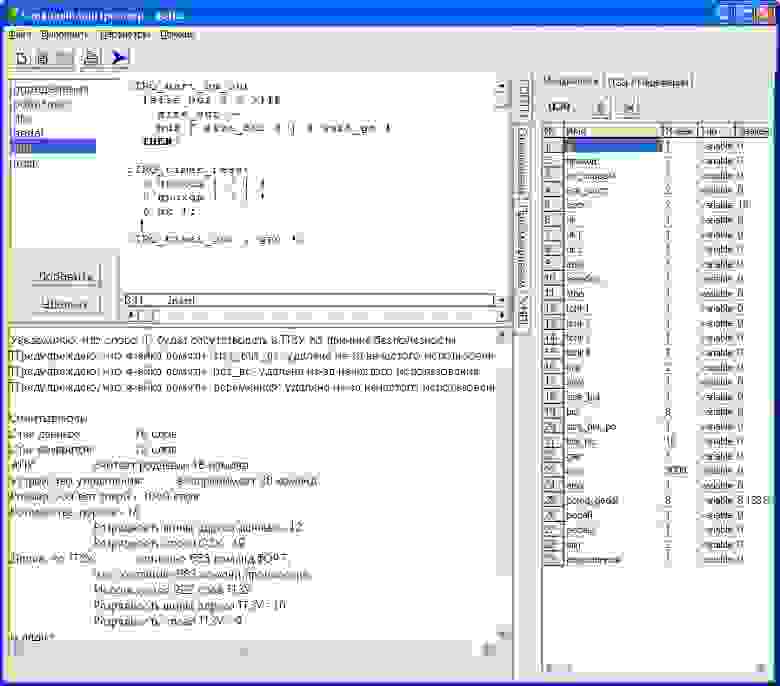
Рис. 4. Среда разработки с отчётом компилятора и линковщика.
Сколько ёмкости FPGA занимает контроллер? Да кто ж его знает. Всё зависит от разрядности числа, выбранной периферии, ещё чего-то, и от текста программы. В контроллере не будет умножителя, если он не встречается в программном коде, или не будет делителя, если его не использует программист. Под программистом я подразумеваю себя, так как других программистов данного контроллера не существует (принцип «не использовать тем, кто не использует»). По блочной памяти для ОЗУ данных и ПЗУ команд: минимум два блока, максимум вся блочная память кристалла.
Максимальная частота работы высчитывается только опытным путём, под конкретную архитектуру. Один из моих 24 разрядных контроллеров не работал на частоте 48 Mhz в Spartan2, на частоте 40Mhz заработал. В Spartan6 на сотне Mhz работал 32 разрядный. А может и на паре сотен заработает, ничего в нём такого сложного нет.
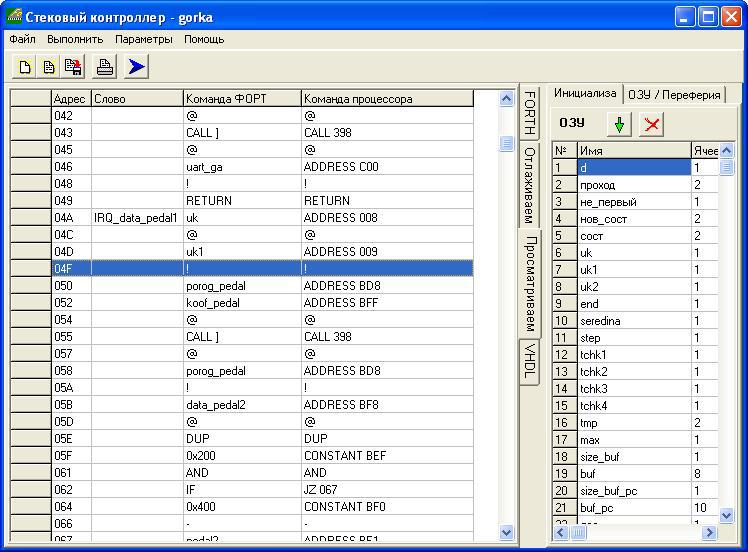
Рис. 5. Вот такой код увидит процессор. Обратите внимание, одна команда FORTH – это одна команда ядра процессора – один системный такт.
Первый PS: упомяну одну возможность сопроцессора – фильтр. Обычный БИХ фильтр. Но вот, что необычного в нём, так это то, что он использует плавающую точку. Не то что б в этом был какой-то смысл, просто прочитал какую-то книжку про форму представления чисел, и решил: ерунда интересна эта ваша плавающая точка, сделаем.
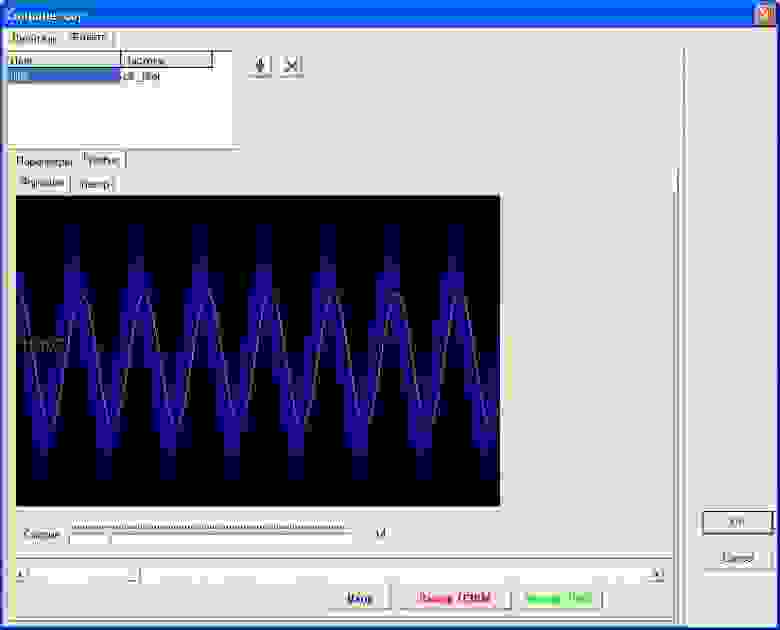
Рис. 6. Моделирование результатов работы фильтра. Высчитывается логика кода VHDL с точностью до битика.
Так же были планы по превращения проекта в систему на кристалле: добавление различных, писанных на VHDL блоков в периферию контроллера. И вроде не так уж и сложно, но запал иссяк. Дурные мысли меня покинули, и бродят где-то между программистами и электронщиками. И зовут их теперь Стартапами.
Так что, если к вам кто-то придёт и представится Стартапом, подумайте, а не скрывается ли под ним какой-нибудь Времяубиватель.
И ещё одно PS: С другой стороны, за время работы над проектом Stackcpu я неплохо подучил три два языка программирования:
1. FORTH, точнее некое его подмножество, необходимое для проверки работоспособности контроллера.
2. С++, на чистом С было бы тяжело написать среду разработки и компилятор. 3. VHDL, именно буквы этого языка и есть контроллер.
Источник



