
- МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
- Как запустить двигатель HDD 4-х проводной
- Описание платы драйвера двигателя
- Открытый проект модуля управления электрическими моторами. Начало
- Архитектура модуля.
- Расчет максимальной частоты переключения и обоснование выбора силовых транзисторов
- Расчет максимальной пульсации тока и обоснование выбора фильтрующих конденсаторов
- Двигатель и контроллер для электросамоката своими руками
МОДУЛЬ ДРАЙВЕРА МОТОРА BLDC
Эта статья предоставит важную теорию и полезные схемы драйверов двигателей жестких дисков, которые можно заставить крутиться с разной скоростью и разных направлениях, а уж где это использовать — решайте сами. Прежде всего обратите внимание, что обычный двигатель шпинделя жесткого диска (HDD) на самом деле является бездатчиковым трехфазным бесколлекторным двигателем постоянного тока BLDC.

Как следует из названия, в бесщеточном (бесколлекторном) двигателе щетки не используются. Бесщеточный двигатель преодолевает потребность в механическом коммутаторе, меняя настройку на обратную, то есть катушки становятся статором, а постоянные магниты становятся частью ротора. Вращение двигателя достигается за счет изменения направления магнитных полей, создаваемых неподвижными катушками. Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе. Чтобы контролировать вращение можно регулировать величину и направление тока в этих неподвижных катушках извне.

Типичный бесколлекторный двигатель постоянного тока с тремя катушками на статоре будет иметь шесть проводов, но в большинстве конструкций три провода будут подключены внутри, а остальные три выходят наружу. Также обратите внимание, что трехфазный бесщеточный двигатель требует трех датчиков Холла для определения положения ротора. В зависимости от физического положения этих датчиков, существует два типа выходных сигналов — фазовый сдвиг 60 ° и фазовый сдвиг 120 °. Комбинируя сигналы трех датчиков Холла, можно определить точную последовательность электронной коммутации. Но в бессенсорном бесщеточном моторе сигналы обратной электродвижущей силы (BEMF) контролируются драйвером для коммутации сигнала вместо положения, определяемого датчиками Холла. Вот поперечное сечение трехфазного бесщеточного двигателя на изображении ниже.

Это 4-х проводный двигатель BLDC от жесткого диска. HDD BLDC имеет четыре соединительных провода вместо трех упомянутых проводов ABC (часто обозначаемых как UVW). И 4-х контактный двигатель BLDC — это обычный трехфазный двигатель BLDC с выведенным центральным отводом. Если у двигателя есть фазы сопротивлением по 1 Ом каждая, то он должен давать 1 Ом от центрального ответвления до каждой фазы, 2 Ом между фазами. Хотя некоторые драйверы двигателей BLDC используют центральный отвод для измерения BEMF для коммутации.

Существует два типа мотора BLDC. Первый имеет встроенные датчики Холла для определения положения ротора, а второй — бессенсорный — не имеет датчика. Коммутация бессенсорного типа обычно основана на BEMF, генерируемой в обмотках статора.
Как запустить двигатель HDD 4-х проводной
Так как можно управлять двигателем HDD BLDC? Чтобы вращать его, нужно контролировать направление и синхронизацию тока в катушках статора, но этот метод управления более сложен. В продаже доступен широкий спектр бессенсорных микросхем драйверов двигателей BLDC, например DRV10866, цена модуля вполне доступная в интернет-магазинах. Двигатель работает с ним довольно хорошо — правда крутящий момент невысокий, что не удивительно, учитывая вход от источника питания 5 В.

DRV10866 — довольно популярная микросхема драйвера трехфазного бесщеточного двигателя без датчиков, интегрированная с шестью МОП-транзисторами с пиковыми токами до 680 мА. Она также предлагает синхронное выпрямление с широтно-импульсной модуляцией (PWM) и бессенсорную запатентованную схему управления обратной ЭДС (BEMF). Но есть и другое решение — универсальная плата драйвера двигателя BLDC для жестких дисков. Плата может использоваться для управления как 3-проводными, так и 4-проводными трехфазными бесщеточными двигателями постоянного тока. Кроме того тут есть несколько полезных опций, таких как управление скоростью и направлением вращения двигателя.
Описание платы драйвера двигателя
Контроллер платы драйвера бесщеточного двигателя 5 В — 12 В постоянного тока для двигателя жесткого диска.
- Подходит для бесколлекторных моторов без датчика.
- Защита от обратного напряжения
- Защита от повышенного тока
- Напряжение привода: 5-12 В
- Рабочий ток: до 1,2 А
- Диапазон скорости: 0-100%
- Управление вращением: CW и CCW
Плата сконструирована так, что требуются проводные соединения только с двигателем и источником питания. Минимальное рекомендуемое Vin составляет 5 В, а максимальное — 12 В постоянного тока. Потенциометр встроенного регулятора меняет скорость двигателя. Кроме того, есть две перемычки для выбора 3-проводного / 4-проводного мотора и выбора прямого / обратного направления. Для нормальной работы все перемычки должны быть установлены. В общем вполне удобное решение для управления трехфазными бессенсорными бесщеточными двигателями.

Плата использует комбинацию стабилизатора напряжения с низким падением напряжения (LDO), микроконтроллера для генерации сигналов с широтно-импульсной модуляцией (PWM) для трехфазного бесщеточного двигателя BLDC. Основная часть — драйвер двигателя — это DRV11873, один трехфазный бессенсорный драйвер BLDC от Texas Instruments. Вот типичная схема включения DRV11873.

16-контактный микроконтроллер (U1) настроен для подачи сигнала ШИМ (чуть ниже 25 кГц) на DRV11873 (U2) с потенциометром (W1) для регулировки скорости мотора путем изменения рабочего цикла ШИМ. Выход сигнала ШИМ может быть отведен от точки пайки, как показано на следующем изображении. Встроенная перемычка P1 соединена с выводом FR DRV11873, так что по умолчанию вывод остается в низком состоянии для вращения вперед (при переставлении вывод поднимается по потенциалу, и двигатель вращается в обратном направлении).

Следующая перемычка P4, подключенная к контакту COM DRV11873, предназначена для выбора 3-проводного / 4-проводного привода. На плате припаяны три дополнительных резистора (R4-R5-R6) для создания виртуального центрального отвода / нейтральной точки (для получения последовательности коммутации) для реализации 3-проводного привода двигателя BLDC.
Если выбирать вариант «сделай сам», стоит отметить, что оба чипа TI (DRV10866 и DRV11873) не сложно собирать. Для упрощения в качестве генератора ШИМ было бы лучше взять таймер 555 как широтно-импульсный модулятор, способный выдавать выходной сигнал примерно 25 кГц с рабочим циклом, который может изменяться от 5% до 95%.
И вот еще одна плата, похожая на описанную, но с небольшими изменениями в компоновке деталей. Микросхема драйвера двигателя — DRV11873, микроконтроллер — STC15W404A, регулятор напряжения — HT7550-1.

В общем найти подходящий драйвер для двигателя жесткого диска или оптического привода вполне возможно, в продаже есть десятки вариантов модулей, просто нужно выбрать правильный.
Источник
Открытый проект модуля управления электрическими моторами. Начало

Основное назначение модуля — управление синхронными бесколлекторными двигателями (BLDC, BLAC, PMSM . ) с трапецеидальной или синусоидальной формой напряжения, с сенсорами скорости-положения или без сенсоров. Кроме этого модуль имеет небольшие габариты, достаточно широкий диапазон питающих напряжений, разнообразные каналы отладки, проводную и беспроводную связь.
Мощность управляемых модулем двигателей может быть в пределах нескольких сотен ватт и напряжение до 30В. Это двигатели различных механизмов и устройств, таких как: 3D-принтеры, автоматические двери, автоматические роллеты, автономные насосы, вентиляторы, замки, электроинструмент, стабилизаторы положения, моторы и сервомеханизмы RC моделей, роботов и проч.
Но этим применение модуля не ограничивается. Его можно использовать с незначительными дополнениями для управления соленоидами, шаговыми двигателями, для управления освещением, в качестве мощного зарядного устройства, как регулятор напряжения, как мощный источник аудио сигналов, как высокоамперный ключ с измерителем тока, да и просто как отладочную платформу.
Словом, такой модуль в хозяйстве инженера может быть очень полезным.
Все эти свойства модуля получаются благодаря классической 3-х фазной полумостовой схеме с датчиками тока и напряжения и производительному микроконтроллеру.
Для ускорения процесса разработки схемы силовой части был взят за основу один из типовых проектов, предлагаемых фирмой TI.
Я остановился на проекте платы TIDA-00901.
Плата обладает хорошими характеристиками: ток до 20 A, мощность двигателя до 200 Вт, номинальное напряжение 12 В. Предназначена для эксплуатации в автомобиле.
В качестве драйвера силовых ключей используется микросхема DRV8305. Некоторые поиски привели к выводу, что это одна из лучших микросхем драйверов для таких приложений.
Плата имеет специфическую круглую форму, в качестве управляющего элемента применен контроллер C2000 LaunchPad. К сожалению программное обеспечение предоставляется не полностью открытым в части библиотек управления моторами. C2000 LaunchPad выполнен на базе DSP процессора семейства F2802x Piccolo. Это семейство процессоров специализировано для разработки несложных преобразователей энергии, и не отличается большой универсальностью и объемом ресурсов.
Архитектура модуля.
В данном проекте решено было выполнить модуль в виде составной конструкции из 2-х плат. Основная плата содержит силовой драйвер, подсистему питания и некоторые периферийные функции. На основную плату устанавливается плата процессора. В качестве процессорной выбрана
плата проекта K66BLEZ1 (ещё статьи по этому проекту — 1, 2, 3, 4 ) с микроконтроллером семейства Kinetis фирмы NXP на базе ядра ARM Cortex-M4. (180 МГц, 2 МБ Flash память, 256 КБ ОЗУ + micro SD карта, часы реального времени с автономным питанием, USB device/host high speed, отдельный чип Bluetooth LE 4/ZigBee )
Модуль питается в диапазоне напряжений от 8.5 до 30 В. Несколько датчиков температуры — в микроконтроллере, вблизи силовых ключей и один внешний предохраняют модуль и мотор от опасных перегревов. Вся элементная база подобрана для работы при температуре до -40 град. С.
Силовые ключи управления мотором рассчитаны на ток в импульсе до 200 А. Измерение тока производится резистивными шунтами с сопротивлением 0.001 Ом. Благодаря встроенным в микросхему драйвера DRV8305 регулируемым усилителям, модуль способен измерять токи от 300 А и до 0.1 А.
Шина CAN дает возможность объединять множество подобных модулей в общую синхронизированную сеть.
Микросхема MPU-9250 полезна в случае если требуется управление ориентацией модуля в пространстве и инерциальная навигация, а также для мониторинга вибраций и ударов.
Встроенный в модуль DС-DC преобразователь с выходным напряжением 5В рассчитан на ток до 3.5 А. Сам модуль потребляет от этого преобразователя не более 150 мА, остальной запас тока может быть отдан на внешнюю нагрузку с разъема X4. Разъем X4 удобно использовать для подключения элементов освещения и индикации, таких как светодиодные RGB ленты на основе чипов WS2812B и аналогичных. Процессором аппаратно поддерживается формирование на цифровых выходах протокола кодирования бит в формате WS2812B, а также PPM, PCM, PWM кодирование. Аналогично без труда с минимальной загрузкой процессора модуль может принимать PPM и PCM сигналы.
Расчет максимальной частоты переключения и обоснование выбора силовых транзисторов
Перепроверим таблицу сравнения транзисторов, предлагаемую в документе от TI. Все параметры заново выписаны из даташитов.
Здесь у меня, как и у специалистов TI выбор пал на CSD1854Q5B. По величине максимального тока это лучший выбор. А частота переключения в 122 КГц далеко уходит за разумный предел достижимый при управлении от семейства Kinetis.
Расчет максимальной пульсации тока и обоснование выбора фильтрующих конденсаторов
Пульсации тока непосредственно влияют на нагрев и срок службы конденсаторов в особенности электролитических. Поэтому необходимо подбирать конденсаторы по типу и номиналу, учитывая расчетный срок службы и максимальные токи.
Пользуясь этой формулой следует проверять способен ли модуль управлять данным мотором без превышения максимальных токов конденсаторов.
Как подсчитали специалисты TI при указанных на схеме конденсаторах модуль на частоте ШИМ 40 КГц может долгое время питать застопоренный мотор с током через обмотки более 80 А.
Источник
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
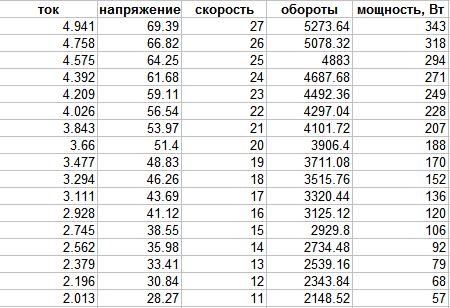
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
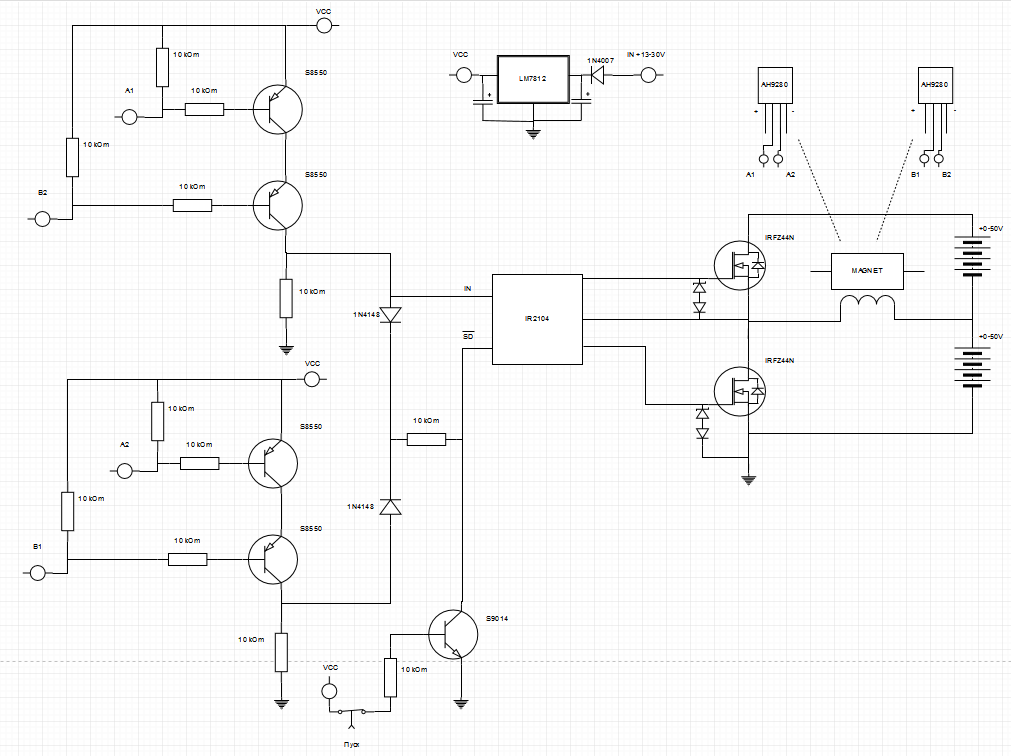
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Источник



