
- InDevices.ru
- Радиоуправляемый танк своими руками
- от admin
- Содержание
- Что нам понадобится
- Порядок работы
- Советы
- Колёсный танк на радиоуправлении своими руками
- Как сделать радиоуправляемый танк: шпион с пультом управления и камерой
- Шаг 1: Инструмент и материалы
- Шаг 2: Сборка парной коробки передач
- Шаг 3: Улучшаем моторчики
- Шаг 4: Драйверы моторчиков
- Шаг 5: Сборка гусениц
- Шаг 6: Прикрутите распорки и прикрепите FPV
- Шаг 7: Верхняя палуба
- Шаг 8: Установите Ардуино и драйвер моторчиков
- Шаг 9: Устанавливаем модуль ресивера
- Шаг 10: Соедините моторчики и батарейки
- Шаг 11: Батарейка
- Шаг 12: Код для Ардуино (C++)
- Шаг 13: Контроллер
- Шаг 14: Проверка
- Гид для новичков по FPV
- Дальность сигнала FPV
- Улучшение антенны
- Шаг 15: Почти готово!
InDevices.ru
InDevices.ru — новейшие разработки в области устройств, роботы, обзор гаджетов
Радиоуправляемый танк своими руками
от admin

 Радиоуправляемый танк является мечтой не только мальчишек, но и многих мужчин всех возрастов. Проще, конечно, купить радиоуправляемую игрушку, которыми заполнены магазины. Но, применив знания в области электроники, можно сделать радиоуправляемую модель танка на основе обычной сборной конструкции.
Радиоуправляемый танк является мечтой не только мальчишек, но и многих мужчин всех возрастов. Проще, конечно, купить радиоуправляемую игрушку, которыми заполнены магазины. Но, применив знания в области электроники, можно сделать радиоуправляемую модель танка на основе обычной сборной конструкции.
Содержание
Что нам понадобится

- сборная модель танка (можно купить в специализированном или интернет — магазине);
- электромоторы;
- редуктор;
- эпоксидный клей;
- паяльник;
- алюминиевый провод диаметром 0, 125 см;
- транзисторы, другая электронная начинка.
Порядок работы
1. Изготовление танковых траков.
Траки можно взять из набора сборной модели, но они сделаны из пластика и это не совсем то, чего требует душа конструктора.
 Форма для отливки траков: 1—4 — стальные пластины, 5 — детали, изготавливаемые, как грунтозацепы, 6 — более длинный стержень, 7 — короткий стержень, 8 — проволочный упругий палец.
Форма для отливки траков: 1—4 — стальные пластины, 5 — детали, изготавливаемые, как грунтозацепы, 6 — более длинный стержень, 7 — короткий стержень, 8 — проволочный упругий палец.
- изготавливается форма для отливки траков, позволяющая производить до 90 траков за час, что вполне достаточно для одной гусеницы;
- перед заливкой (олова, свинца или их сплава) форму прогревают;
- через 30 секунд после заливки заготовка трака готова, для чего верхняя пластинапроворачивается, и стержнивынимаются;
- лишние части металла снимаются напильником.
Это приспособление изготавливается в зависимости от размеров модели танка и формы трака.
2. Изготовление танковых гусениц.
- с помощью сверла в траках проделываются отверстия для пальцев;
- производится соединение траков с помощью пальцев (алюминиевый провод) и их склеивание.
3. Компоновка корпуса танка. 
— устанавливаются двигатели (электромоторы), редуктор и аккумуляторные батареи;
— монтируется плата приемника радиосигнала и антенна: 
Настройка приемника заключается в раздвигании витков контурной катушки. Кроме того, подбирается емкость связи с антенной;
— корпус танка собирается целиком.
4. Производство передатчика.
— передатчик производится на основании следующей схемы:
 Рис.2 Схема передатчика
Рис.2 Схема передатчика
Передатчик рассчитан на управление 12 разными нагрузками. Допускается одновременное нажатие от 4 до 8 кнопок, что дает возможность работать с моделью в разных режимах. В роли индикаторов исполнения команд выступают светодиоды. После окончания всех работ проводятся ходовые испытания танка.
Советы
Существует принципиальная возможность установке на модели танка устройства, с помощью которого будет имитироваться выстрел из пушки. Но все известные способы имитации выстрела сопряжены с большими техническими трудностями, от которых рекомендуется отказаться с целью облегчения работ.
Создайте свою боевую армию, добавив в комплект к танку самодельный радиоуправляемый самолет.
Источник
Колёсный танк на радиоуправлении своими руками

Современные, да и не только современные — практически все настоящие танки выглядят впечатляюще, их конструкции зачастую лаконичны, при этом внушают мощь и уважение. По этой причине большой популярностью пользуется создание уменьшенных моделей танков, некоторые модели могут повторять реально существующие модели вплоть до каждой мелочи. Например, на картинке представлена относительно новая модель военной техники — БМПТ «Терминатор», выглядит весьма впечатляюще.

Модель не обязательно может быть похожа на реальный танк во всех деталях — зато её можно снабдить моторами и системой радиоуправления с пультом. В этом случае получится настоящая радиоуправляемая игрушка, которая придётся по душе как и детям, так и вечно взрослеющим мужчинам. Автор в статье описал довольно простой способ изготовления шасси радиоуправляемого «танка». В качестве основы для корпуса выступает пластиковый отрезок вентиляционного канала — такие продаются в любых строймагах и стоят совсем недорого. Отрезок должен соответствовать желаемой длине будущей модели — слишком длинное расстояние между колёсами приведёт к тому, что машина будет плохо поворачивать, поэтому должны быть соблюдены разумные пропорции.


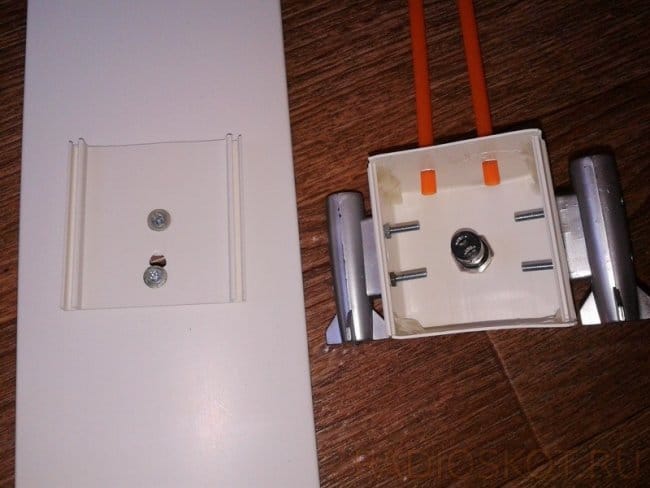
Пластик разрезается в нужных местах, как показано на картинках выше, а затем сгибается. Для фиксации сгиба очень удобно использовать паяльный фен, но подойдёт также и обычная зажигалка — нужно провести несколько раз небольшим пламенем под линией будущего сгиба, затем отогнуть и зафиксировать угол. Если всё сделать аккуратно, швов практически не будет видно, корпус будет смотреться единым целым.
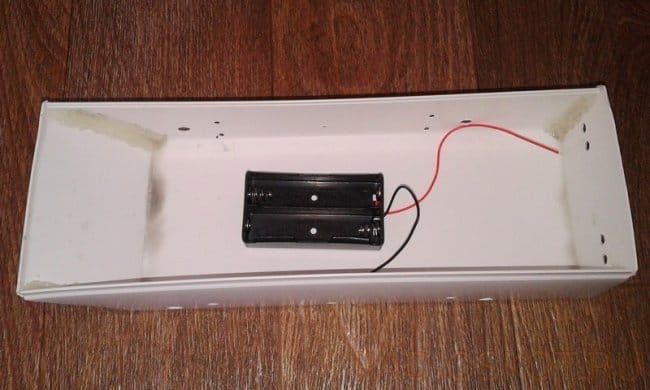

Изнутри места стыков проклеиваются с помощью термоклея — клеевые стержни хорошо держат пластик и оргстекло, поэтому соединения получаются вполне надёжными, как для игрушечной машинки. Теперь внутрь можно примерять электронику — на фото выше показан батарейный отсек, в который затем будут вставлены аккумуляторы формата АА. Также на корпусе по бокам сверлятся отверстия для крепления моторов и вывода наружу валов под колёса.

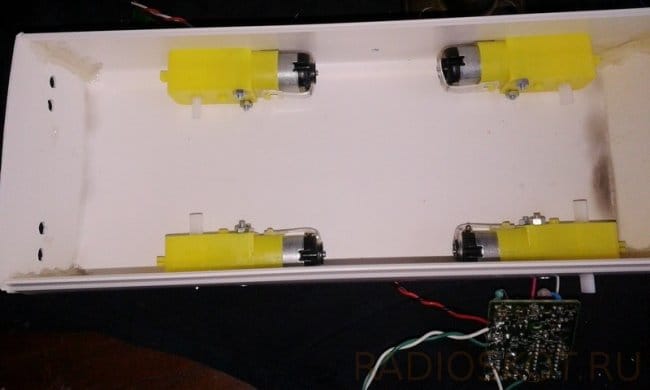
Для большей аутентичности игрушечный танк можно сделать гусеничным — однако это гораздо сложнее в домашних условиях, кроме того, самодельные гусеницы будут не так надёжны и то и дело норовят сползти. Более практичным вариантом будет установка 4-х мотор-редукторов со специальным колёсами. Такие мотор-редукторы, показанные на картинке ниже, часто используются и имеют большую популярность благодаря своей универсальности и невысокой цене. Коэффициент редукции уже рассчитан под постройку радиоправляемых машинок и скорость получится адекватной. Поворот будет осуществляться как у танка, путём отключения одной из сторон. Вращаются колёса на правой стороне — машинка едет влево, и наоборот. При движении вперёд крутятся все 4 мотора, что придаёт машинке хорошую проходимость.
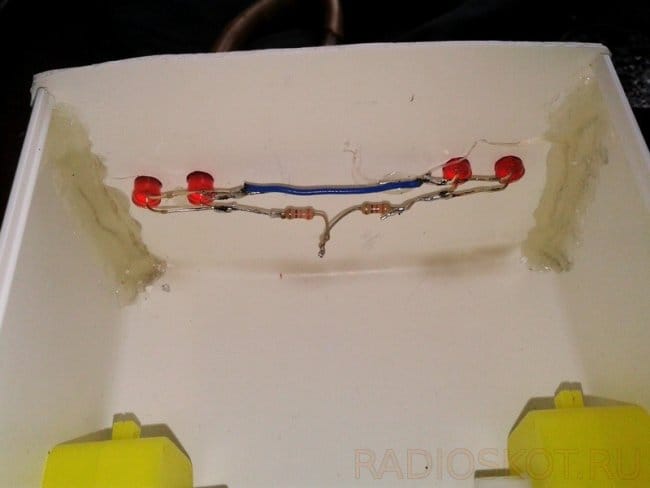
Не лишним будет предусмотреть «оптику» — несколько красных светодиодов на задней части машинки, пара мощных светодиодов-фар спереди, несколько по бокам, а также несколько на башне. Управлять включением и выключением подсветки можно будет с пульта, это придаст машинке эффектности в темноте, да и просто позволит освещать путь впереди.
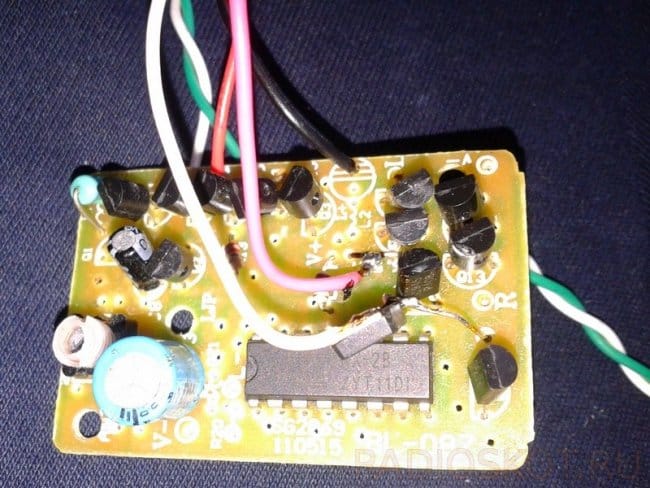
Важнейшей часть конструкции является сама плата дистанционного управления — без неё машинка просто никуда не поедет. Довольно часто фирменные радиоуправляемые игрушки ломаются из-за выхода из строя механической части от постоянных ударов и падений, а электроника при этом остаётся в работоспособном состоянии. Можно дать ей вторую жизнь и установить на самодельную машинку, предварительно определив назначение выводов. Для управление необходимо минимум 4 канала — для движения вперёд, назад, поворота вправо, влево. Не лишним будет также 5-й канал для включения подсветки, или, например, осуществления выстрела из пушки. Если под рукой нет такой ненужной платы, можно приобрести готовые модули дистанционного управления, их цены варьируются от 200 до 400 рублей, а дальности хватит для езды по квартире. На картинке ниже можно увидеть процесс подключения моторов к плате. Также к плате подключается схема с динамиком — это имитатор звука выстрелов, который будет актуален для модели танка.




Следующим этапом изготавливается башня танка. Она не является обязательной, шасси полностью автономно и может передвигаться самостоятельно, но какой же танк без башни с пушками. Корпус самой башни изготавливается из пластинка от вентиляционного канала по той же технологии, по бокам крепятся подобия орудий от ненужных игрушек, спереди также два длинных ствола. На концах дул крепятся небольшие светодиоды для имитации выстрелов.


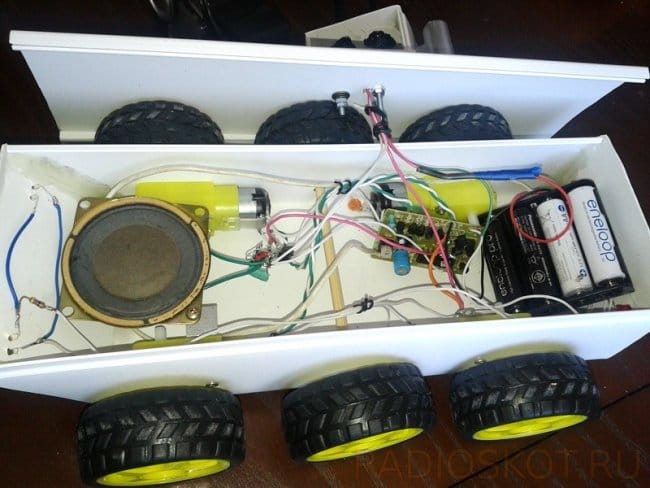
Башня прикручивается к шасси винтом. В качестве модификации и дальнейшего развития модели можно добавить сервопривод для поворота башни с пульта, а декоративные дула заменить на «настоящие», стреляющие игрушечными пульками. На последней фотографии можно рассмотреть всю внутреннюю электронику, которая до безобразия проста — моторы, подсветка, звуковая имитация выстрелов просто подключаются к плате дистанционного управления на различные каналы. Питается вся конструкция от 4-х последовательно включенных аккумулятора АА, который из которых выдаёт напряжение 1,2В. Питать машинку от батареек нерационально — они довольно быстро сядут, ведь суммарный ток потребления всех 4-х моторов может достигать 0,5 — 1А. По середине между моторами можно установить дополнительную пару колёс без привода, для придания большей схожести с танковым шасси. Удачной сборки!
Источник
Как сделать радиоуправляемый танк: шпион с пультом управления и камерой
Давайте соберём танк на радиоуправлении с видом от первого лица, которым можно управлять на расстоянии до 2 километров! Мой проект разрабатывался на основе вездехода с пультом управления, его легко собрать, легко запрограммировать и это отличный проект для любителей!
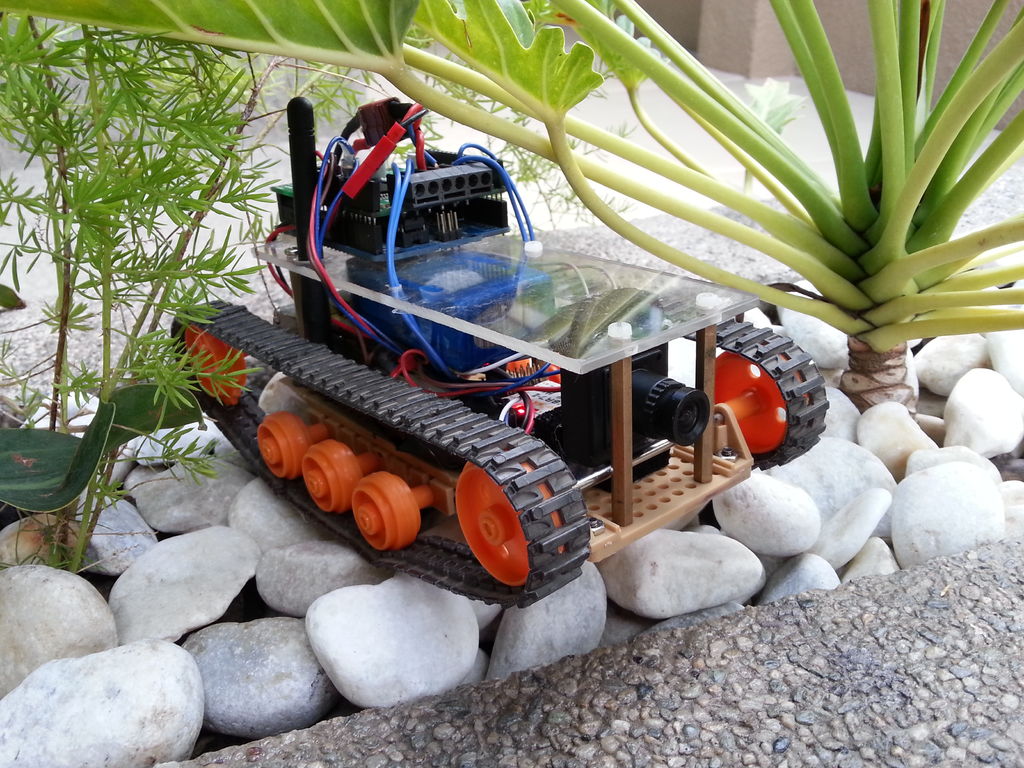

Бот очень быстр и проворен, не говоря уже о том, что он несёт в себе два мощных двигателя! Он, безусловно, обгонит человека, вне зависимости от того, на какой поверхности проводятся гонки!
Бот до сих пор является прототипом, даже после того, как на его разработку были потрачены месяцы.
Итак, что же такое FPV?
FPV, или First Person View — это Вид от Первого Лица. Обычно мы видим FPV во время игры за приставками и компьютером, например в гонки. Также FPV используется военными для слежки, защиты или для контроля за защищенными зонами. Любители используют FPV в квадрокоптерах для воздушных съемок и просто ради веселья. Всё это звучит настолько же здорово, насколько дорого стоит сборка квадрокоптера, поэтому мы решили построить что-то меньшее по размеру, что ездит по земле.
Как этим управлять?
Бот базируется на плате Ардуино. Так как Ардуино поддерживает большое разнообразие надстроек и модулей (RC/ WiFi/ Bluetooth), то можно выбрать любой из типов связи. Для данной сборки мы будем использовать особые компоненты, которые позволят осуществлять управление на больших расстояниях, используя 2.4Ghz передатчик и ресивер, управляющий ботом.
В последнем шаге есть демонстрационное видео.
Шаг 1: Инструмент и материалы





Большинство запчастей я покупаю в местных магазинах для хобби, остальное нахожу онлайн — просто ищите предложения с лучшей ценой. Я использую много решений от Tamiya и моя инструкция написана с учётом этой особенности.
Запчасти и материалы я покупал в Gearbest — на тот момент у них была распродажа.
- клон Ардуино УНО R3
- Плата Pololu Dual VNH5019 Motor Shield (2x30A)
- Пины-папы
- 4 распорки
- Винты и гайки
- Модуль передачи сигнала (трансмиттер) 2.4 Ghz — читайте подробнее в шаге 13
- Ресивер 2.4 Ghz минимум на два канала
- 2 моторчика Tamiya Plasma Dash / Hyper dash 3
- Набор коробки передач Tamiya Twin Motor Gearbox (стоковые моторчики в комплекте)
- 2 универсальных платы Tamiya
- набор гусениц и колес Tamiya
- 3 литий-полимерных батарейки 1500mAh
- камера с видом от первого лица с поддержкой удалённого управления направлением и зумом
- трансмиттер и ресивер данных для FPV 5.8Ghz 200mW
- Бутылка суперклея
- Горячий клей
Шаг 2: Сборка парной коробки передач

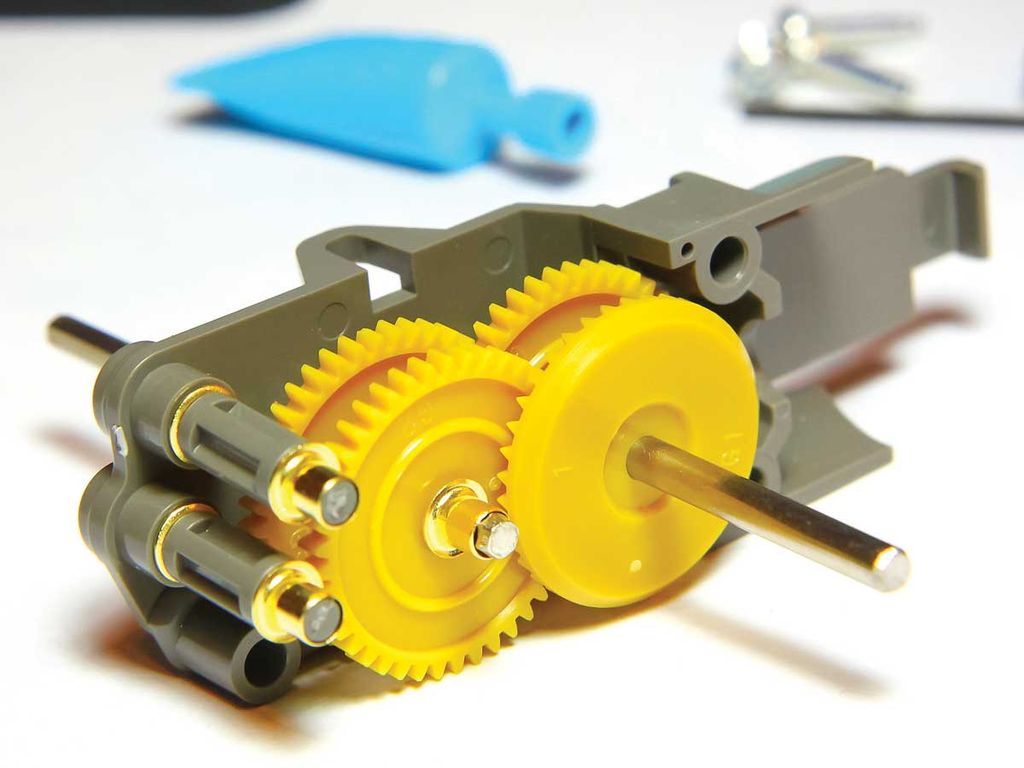
Время для распаковки коробки передач. Просто следуйте инструкции, и всё будет в порядке.
Важная заметка: используйте соотношение шестеренок 58:1.
Советы:
- смазывайте шестерёнки перед сборкой коробки, а не после
- не забудьте о металлических спейсерах, иначе коробка будет скрипеть
- используйте формат шестеренок 58:1, он быстрее, чем 204:1
Шаг 3: Улучшаем моторчики

Коробка передач поставляется с моторчиками, но, по моему мнению, они очень медленные. Поэтому я решил использовать в проекте моторчики Hyper dash, вместо Plasma Dash, которые потребляют больше энергии.
Тем не менее, моторчики Plasma Dash являются самыми быстрыми в серии моторчиков Tamiya’s 4WD. Моторчики стоят дорого, но вы получите лучший продукт за эти деньги. Эти моторчики с углеродным покрытием вращаются с частотой 29000 оборотов в минуту на 3V и 36000 оборотов в минуту на 7V.
Моторчики рассчитаны на работу с источниками питания на 3V и увеличение напряжения, хотя и повышает производительность, но снижает их срок службы. С драйвером Pololu 2×30 Motor Driver и двумя литий-полимерными батарейками, программа в Ардуино должна быть настроена на максимальную скорость 320/400, вскоре в шаге с кодом вы выясните что это значит.
Шаг 4: Драйверы моторчиков
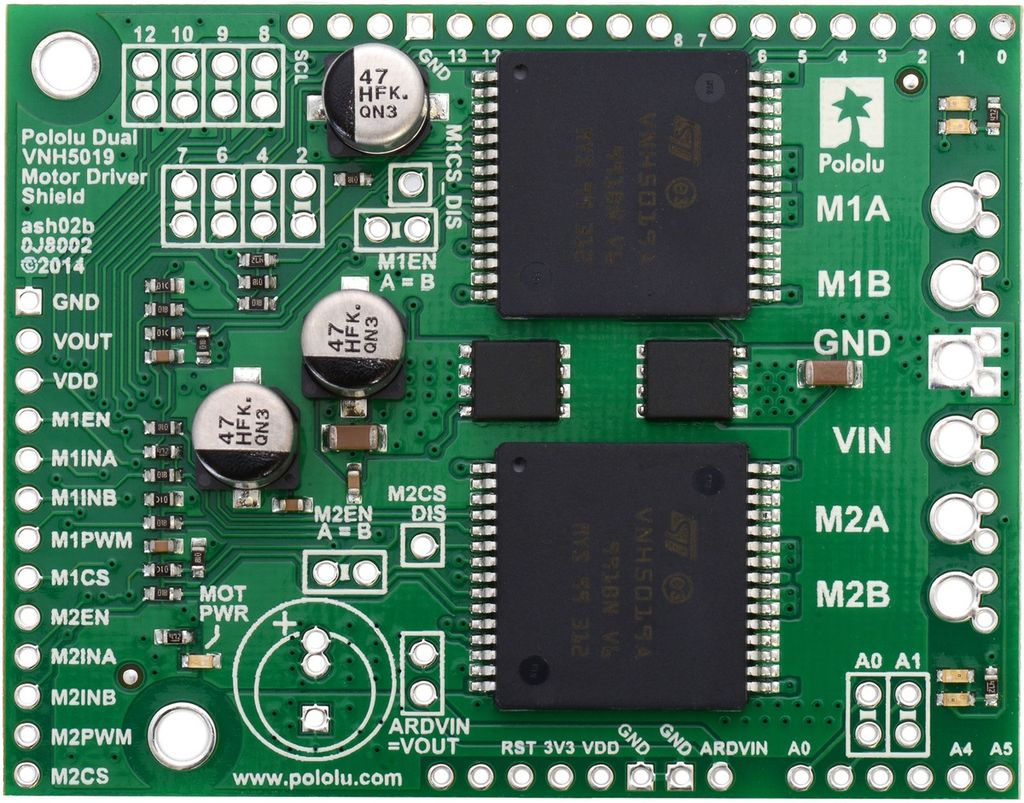
Я очень долго увлекаюсь робототехникой и могу сказать. что лучшим драйвером двигателей является Pololu Dual VNH5019. Если дело касается мощности и эффективности, то это лучший вариант, но когда мы говорим о цене — он явно не наш друг.
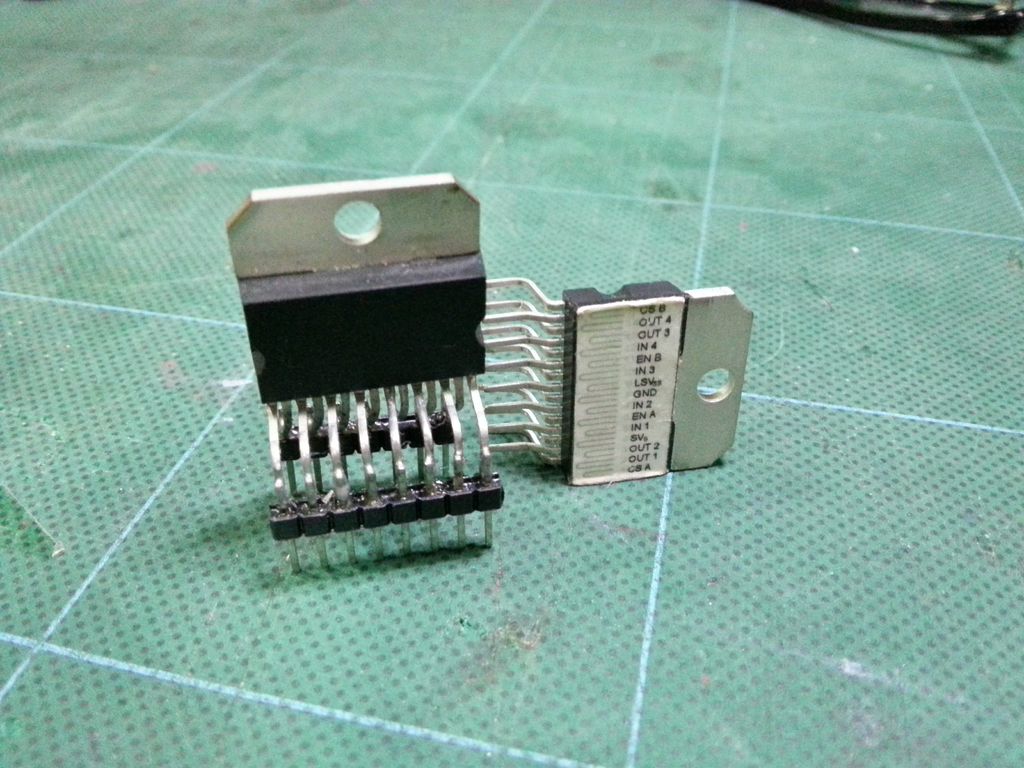
Другим вариантом будет собрать драйвер L298. 1 L298 рассчитан на один моторчик, что является лучшим решение для моторчиков для высокой силы тока. Я покажу вам, как собрать свою версию такого драйвера.
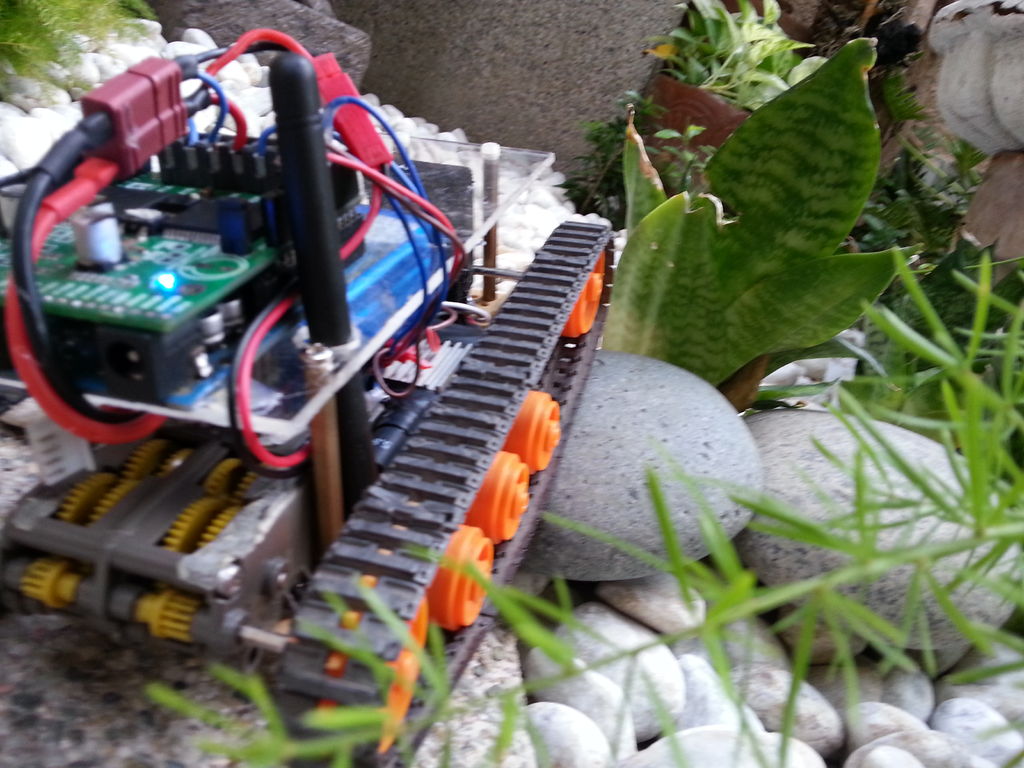
Шаг 5: Сборка гусениц
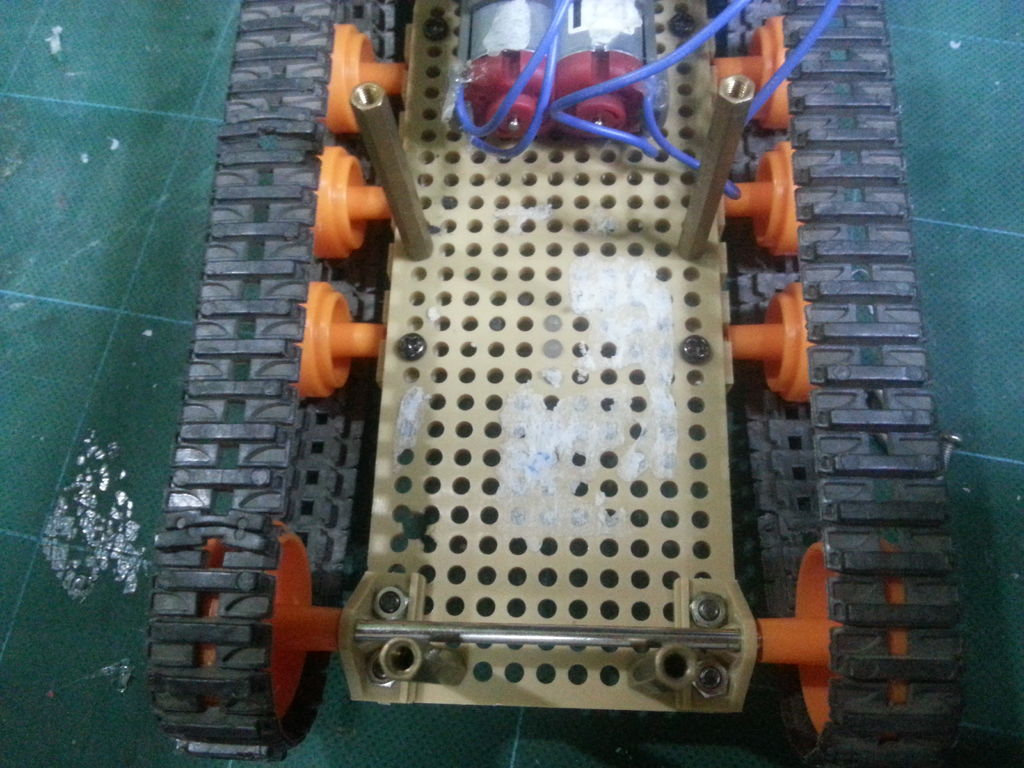
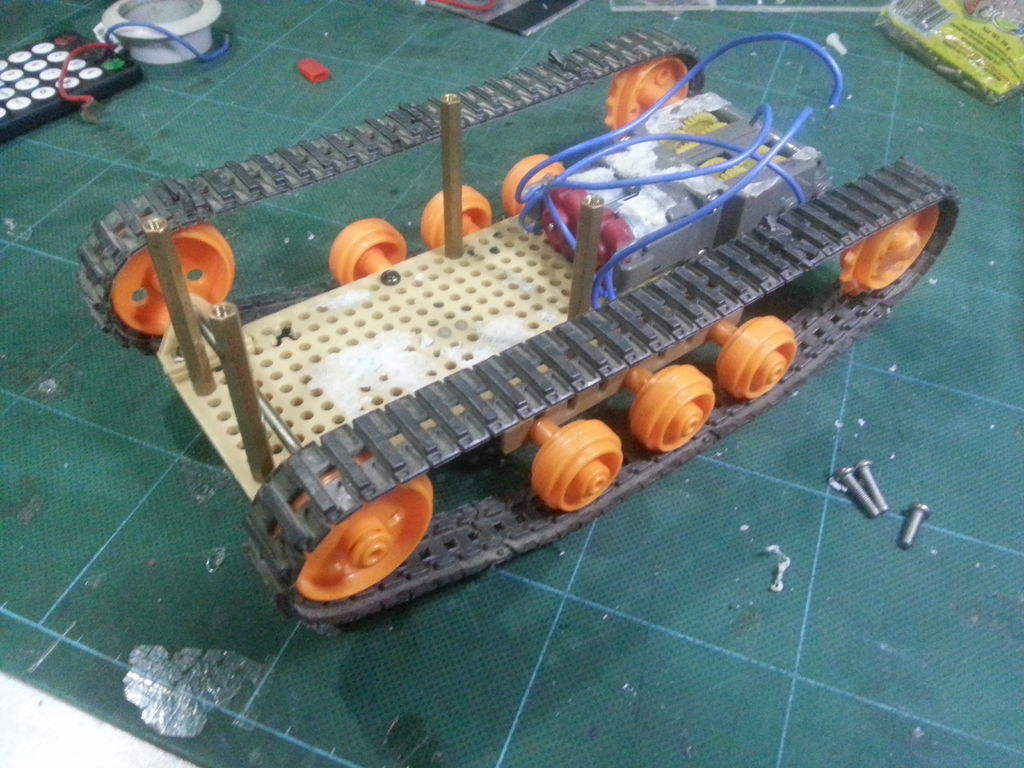

Включите воображение и сконфигурируйте гусеницы по своему вкусу.
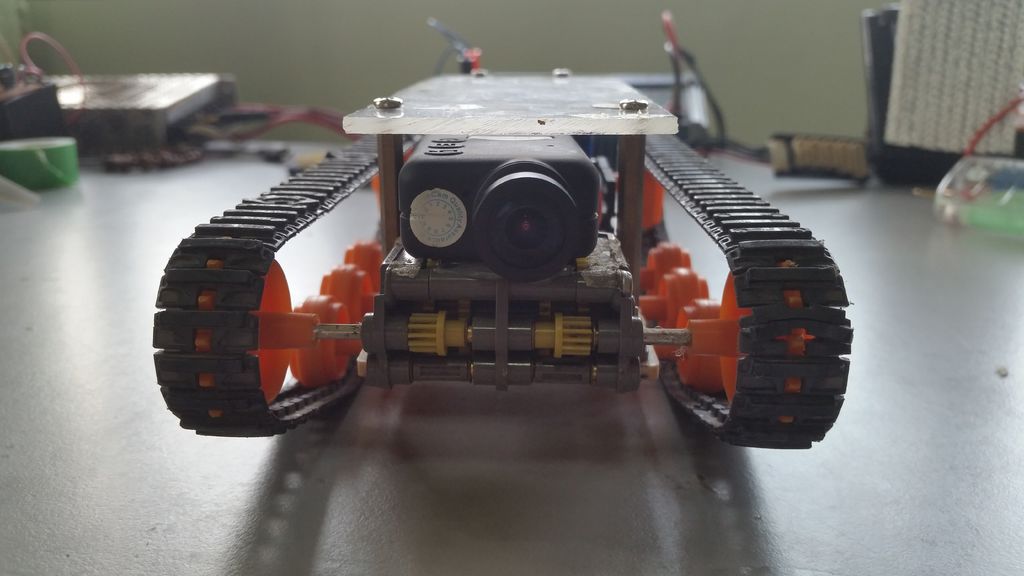
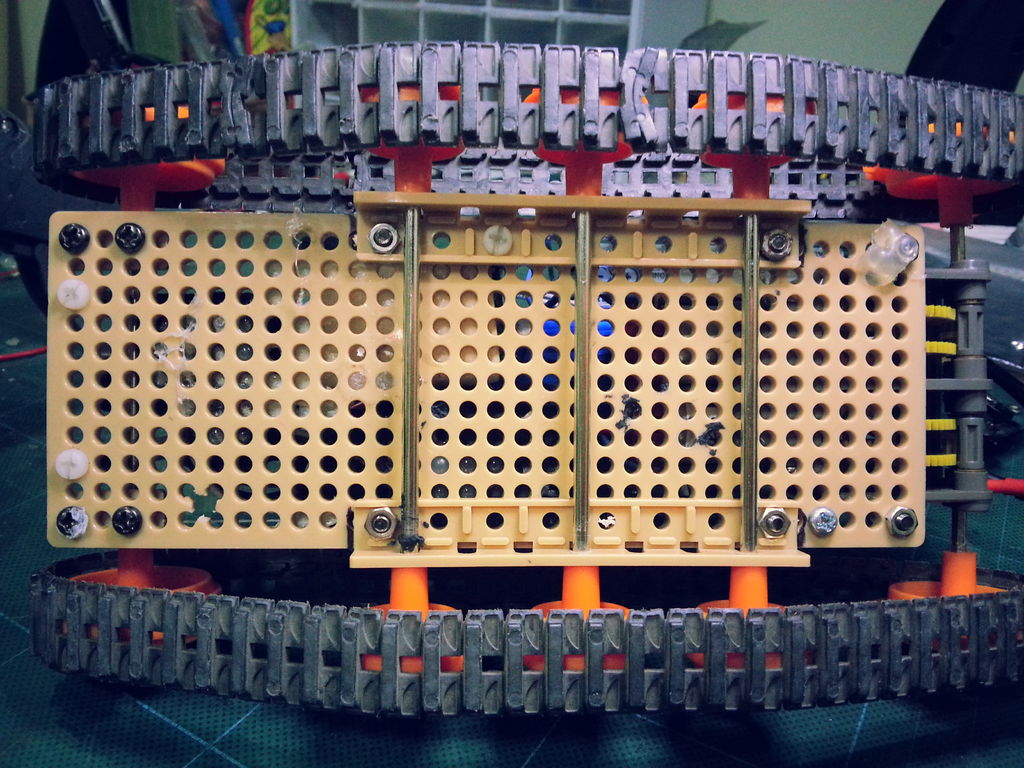
Шаг 6: Прикрутите распорки и прикрепите FPV
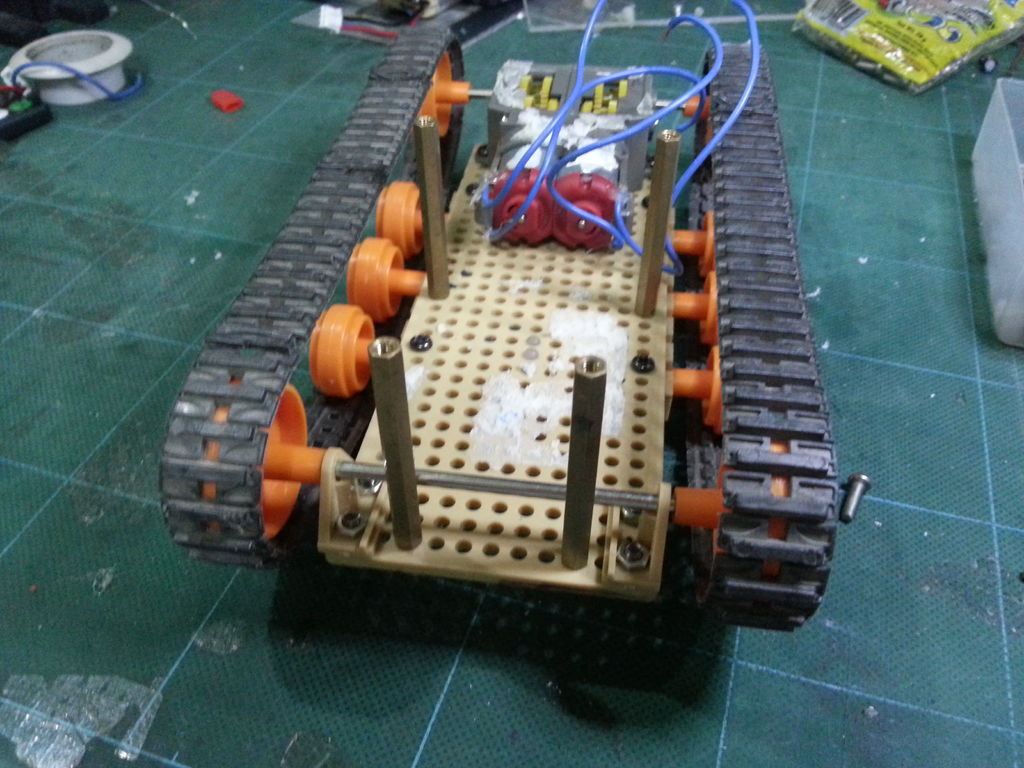

Опять же, подключите ваше воображение и придумайте как расположить распорки и камеру для вида от первого лица. Закрепите всё при помощи горячего клея. Прикрепите верхнюю палубу и просверлите дырки для крепления антенны FPV и под установленные распорки, после этого закрепите всё на винты.
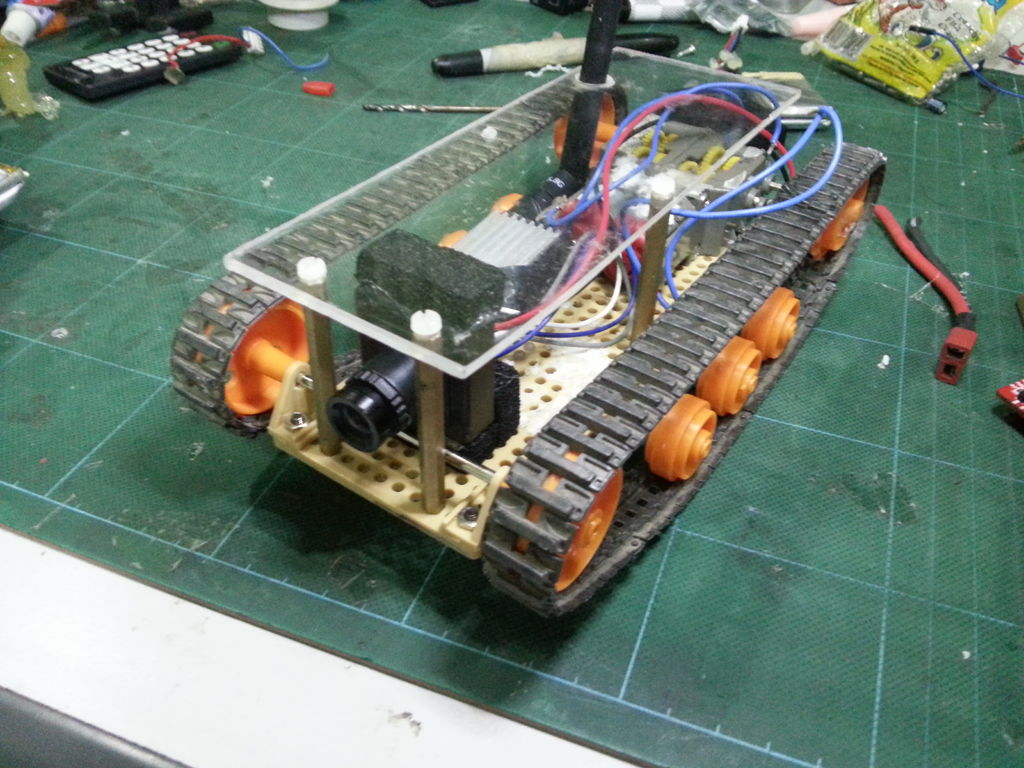
Шаг 7: Верхняя палуба
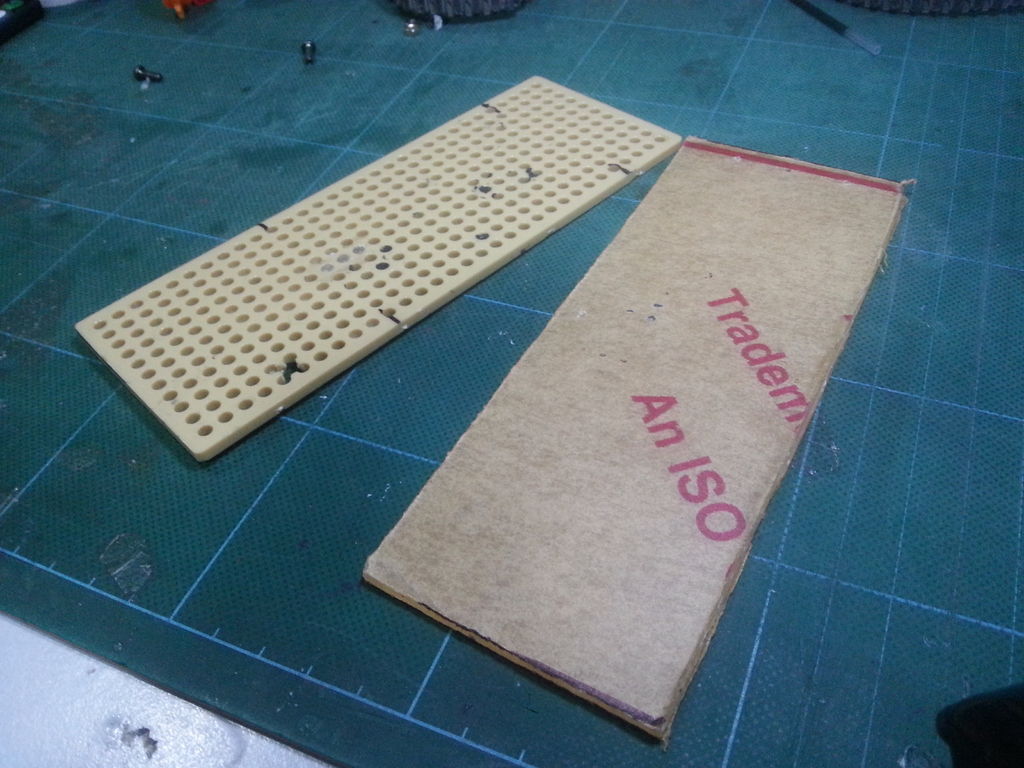
Целью создания верхней палубы было увеличение свободного места, так как компоненты FPV занимают очень много пространства в нижней части дрона, не оставляя места для Ардуино и драйвера моторчиков.
Шаг 8: Установите Ардуино и драйвер моторчиков
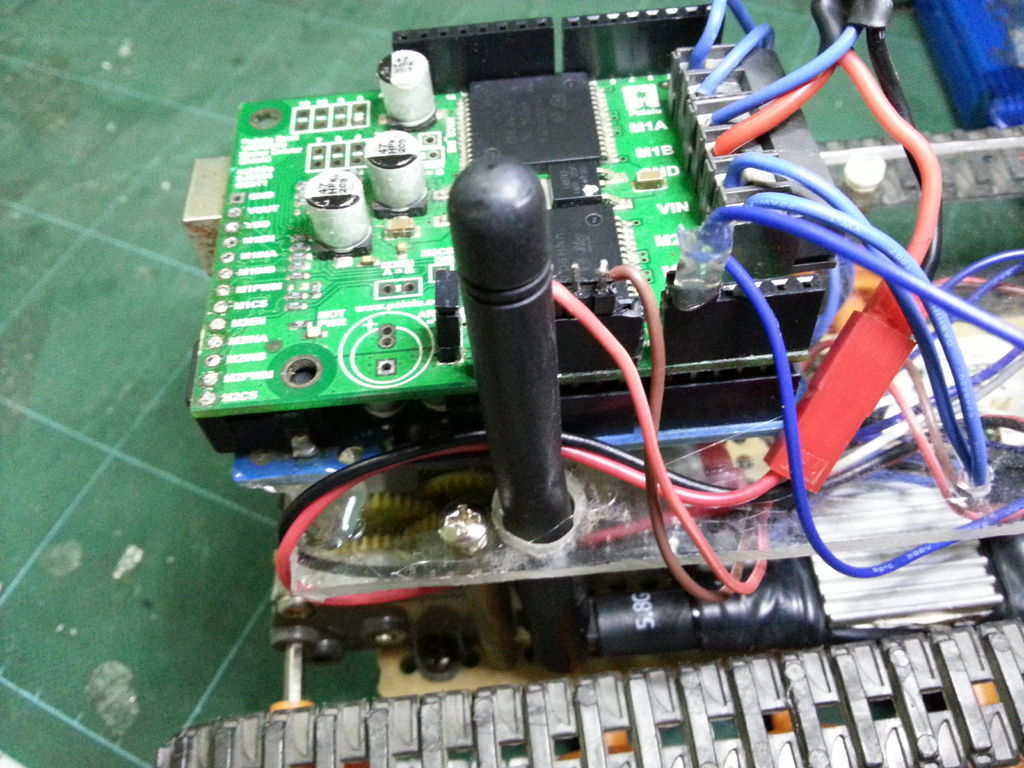
Просто прикрутите или приклейте Ардуино на свое место на верхней палубе, а затем пристыкуйте поверх него драйвер моторчиков.
Шаг 9: Устанавливаем модуль ресивера
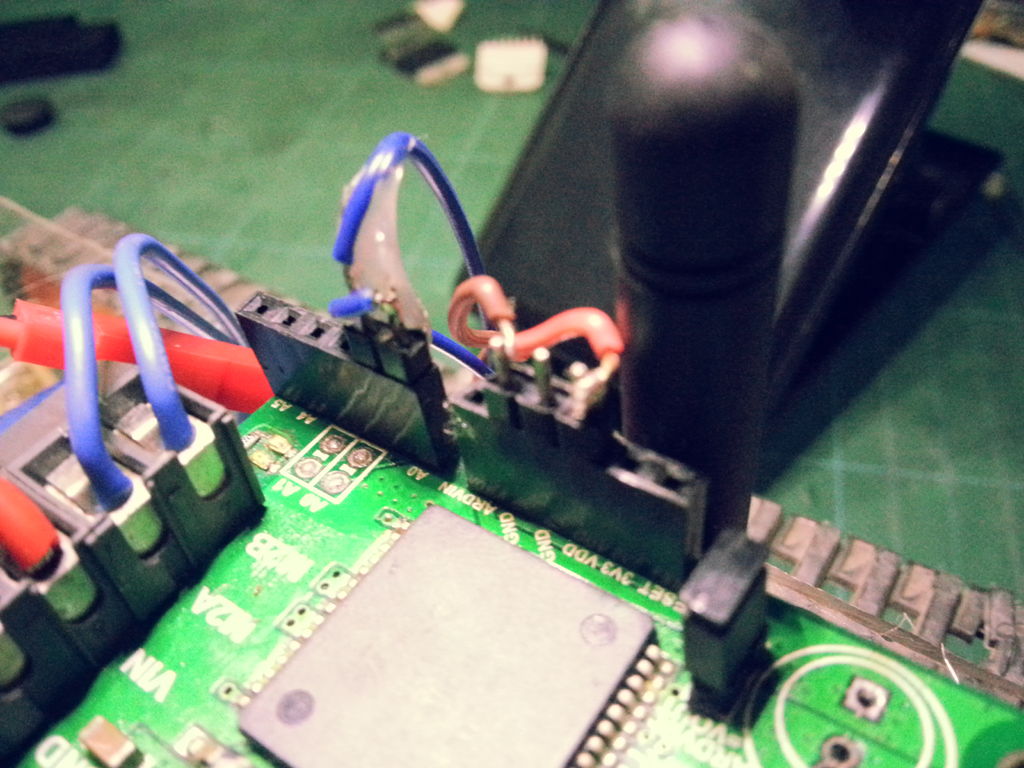
Пришло время соединить модуль Rx с Ардуино. Используя каналы 1 и 2, соедините канал 1 с А0, а 2 с А1. Подключите ресивер к пинам 5V и GND на Ардуино.
Шаг 10: Соедините моторчики и батарейки
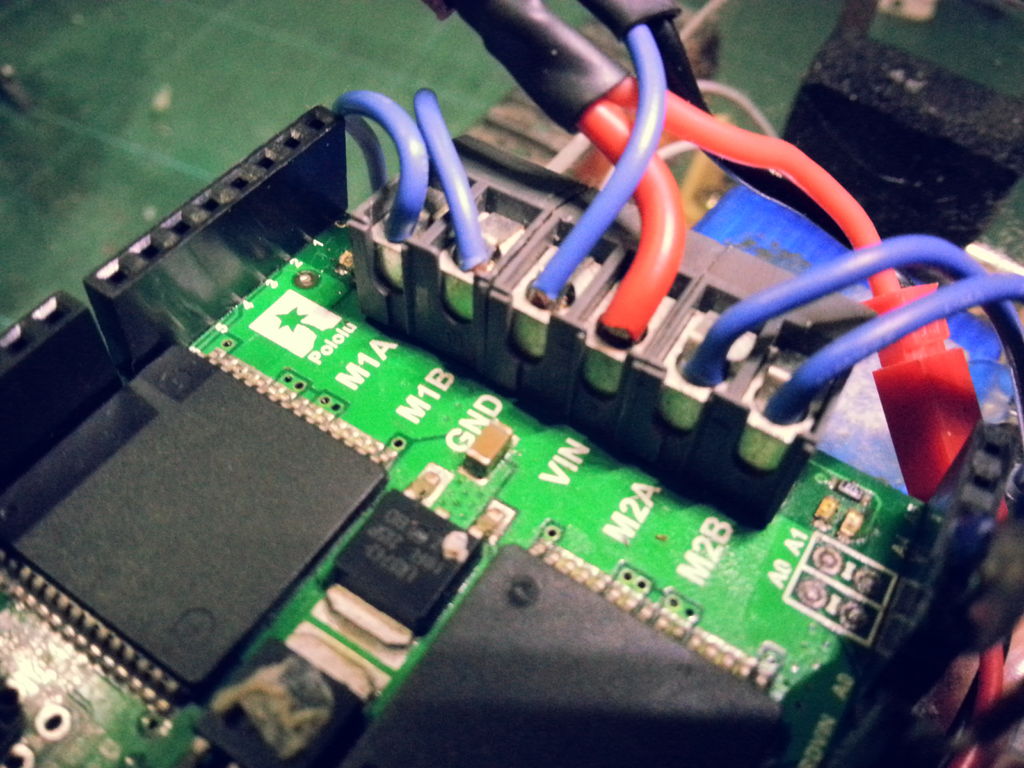
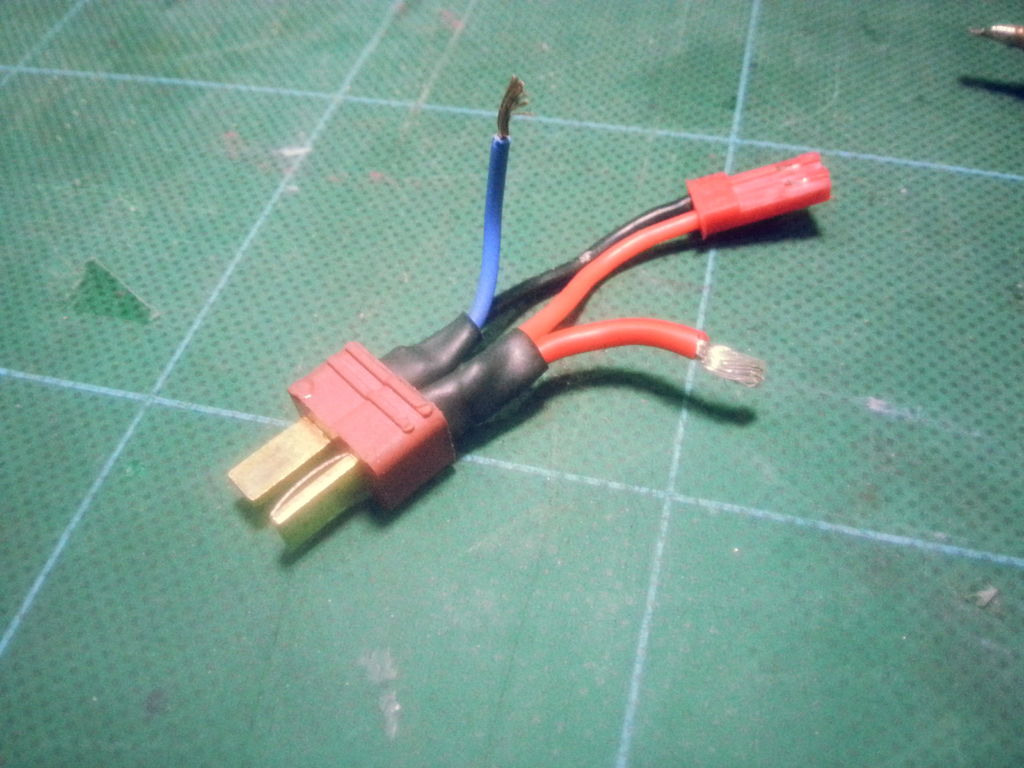
Припаяйте провода к моторчику и соедините их с драйвером соответственно каналам. Касаемо батарейки, вам нужно будет создать свой коннектор, используя штекер JST-папу и штекеры дины-папы. Посмотрите фотографии, чтобы лучше понять, что от вас потребуется.
Шаг 11: Батарейка
Возьмите батарейку и определите место, на которое вы её установите.
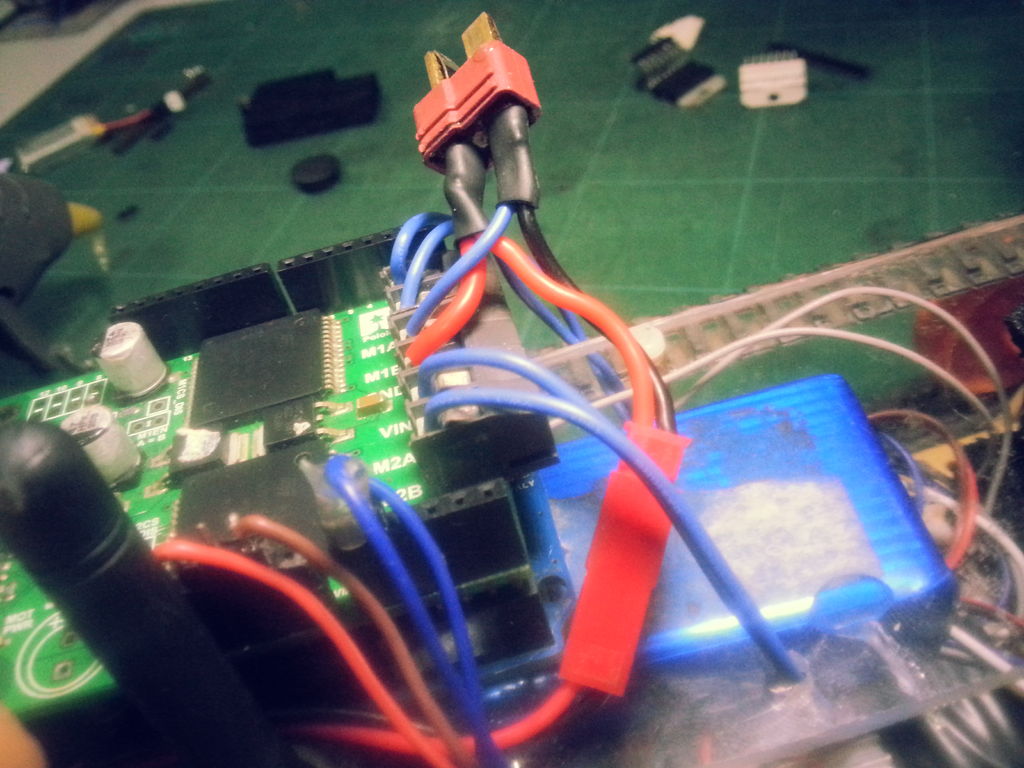
Как только вы подберёте для нее место, создайте адаптер-папу для подключения к батарейке. Батарейка 3S 12V Li-po будет питать камеру FPV, моторчик и Ардуино, так что вам нужно будет создать коннектор для линии питания моторчиков и линии FPV.
Шаг 12: Код для Ардуино (C++)
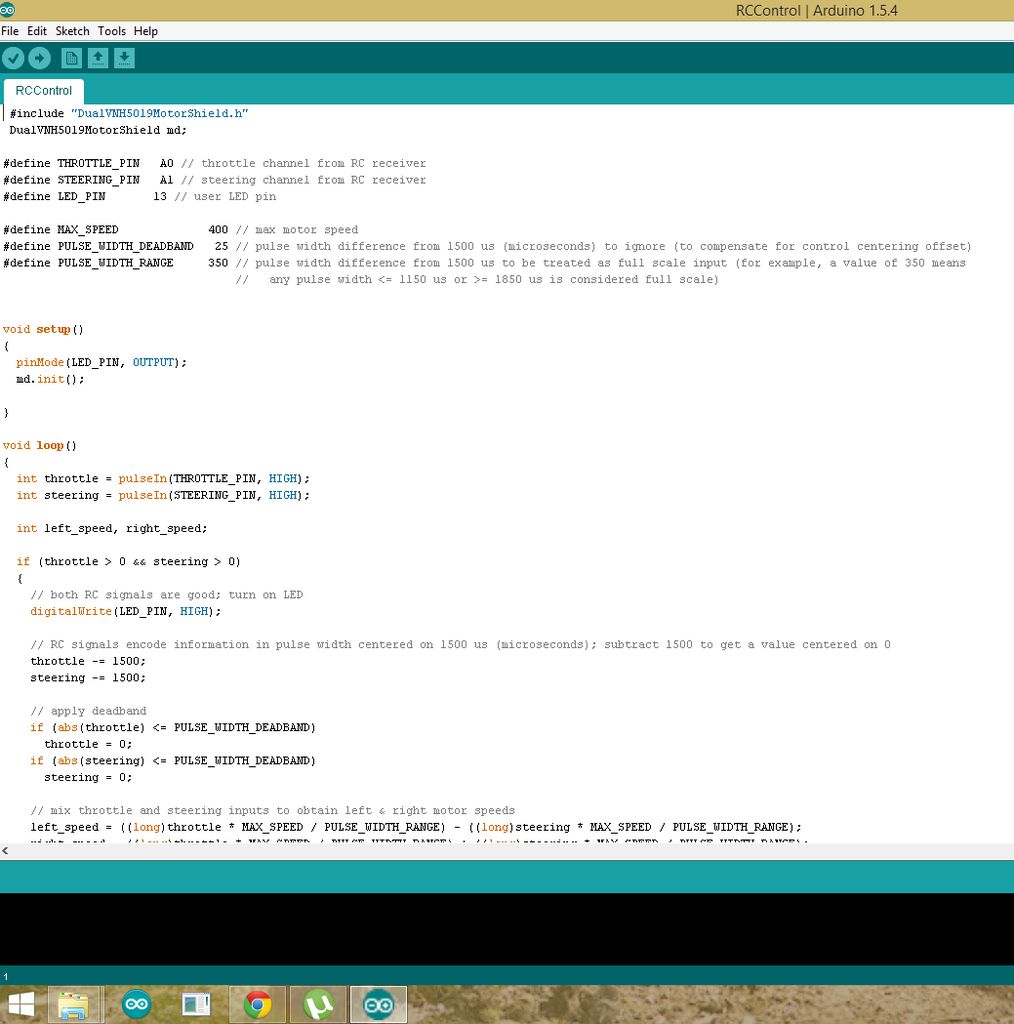
Код очень прост, просто загрузите его и всё должно заработать с драйвером моторчиков VNH (удостоверьтесь, что скачали библиотеку драйвера и положили её в папку библиотек Ардуино).
Код схож с Zumobot RC, я просто заменил библиотеку драйвера моторчиков и настроил кое-какие штуки.
Для драйвера L298 используйте стандартную программу Zumobot, только соедините всё согласно тому, как написано в библиотеке.
#define PWM_L 10 ///левый мотор
#define PWM_R 9
#define DIR_L 8 ///левый мотор
#define DIR_R 7
Просто загрузите код и приступайте к следующему шагу.
Шаг 13: Контроллер


На рынке есть разные типы контроллеров для радиоуправляемых игрушек: для воды, земли, воздуха. Они также работают на различных частотах: AM, FM, 2.4GHz, но, в конце концов, все они остаются обычными контроллерами. Я точно не знаю название контроллера, но знаю, что он используется для воздушных дронов и имеет больше каналов по сравнению с наземным или водным.
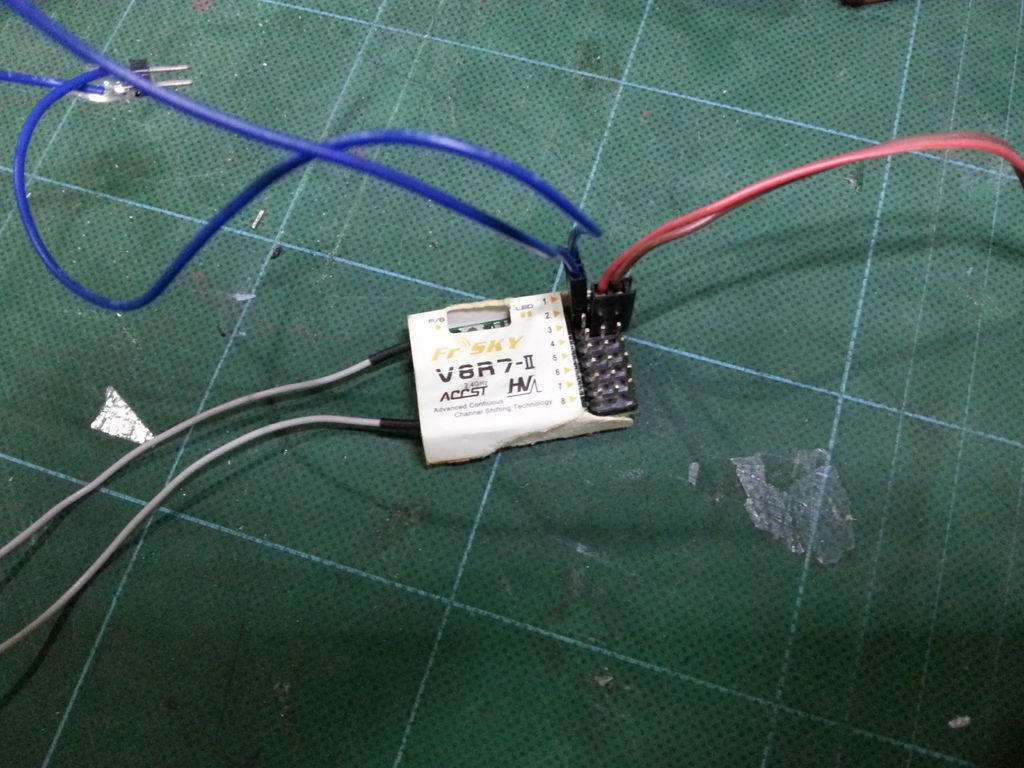
На данный момент я использую Turnigy 9XR Transmitter Mode 2 (No Module). Как вы видите, в названии говорится, что он безмодульный, это означает, что вы сами выбираете, какой модуль связи 2.4GHz в него встроить. На рынке есть дюжины брендов, у которых есть свои особенности использования, управления, расстояния и другие разные фишки. Сейчас я использую FrSky DJT 2.4Ghz Combo Pack for JR w/ Telemetry Module & V8FR-II RX, который стоит дороговато, но просто посмотрите на его спецификацию и плюшки, тогда цена покажется не такой уж и большой за всё это добро. Плюс модуль идёт сразу с ресивером!
И помните, что даже если у вас будет контроллер и модули, вы не сможете включить его, пока не обзаведётесь батарейками, подходящими к контроллеру. В любом случае, найдите контроллер, который вам подходит, и тогда вы определитесь с подходящими батарейками.
Совет: если вы новичок, то обратитесь за помощью в местные хобби-магазины или найдите группы энтузиастов-радиолюбителей, потому что этот шаг — не просто шутка и вам нужно будет выложить существенную сумму денег.
Шаг 14: Проверка




Сначала включите бота, затем включите модуль передатчика, после этого модуль приёмника должен показать успешную привязку, мигая светодиодом.
Гид для новичков по FPV
Часть, установленная на боте называется FPV-передатчиком и камерой, а то, что у вас в руках, называется FPV-приёмником. Приёмник соединяется с любым экраном — будь то LCD, TV, TFT и т.д. Всё, что нужно сделать, так это вставить в него батарейки или подключить к источнику питания. Включите его, затем при необходимости поменяйте канал на приёмнике. После этого вы должны увидеть на экране то, что видит ваш бот.
Дальность сигнала FPV
В проекте использовался недорогой модуль, способный работать на расстоянии до 1.5 — 2 км, но это относится к использованию девайса на открытом пространстве, если вы хотите получить сигнал большей силы, то купите передатчик большей мощности, например 1000mW. Примите на заметку, что мой передатчик имеет мощность всего в 200mW и он был самым дешевым, который я смог найти.
Улучшение антенны
Замены антенны на антенну типа клевер увеличит дальность и силу сигнала
Шаг 15: Почти готово!
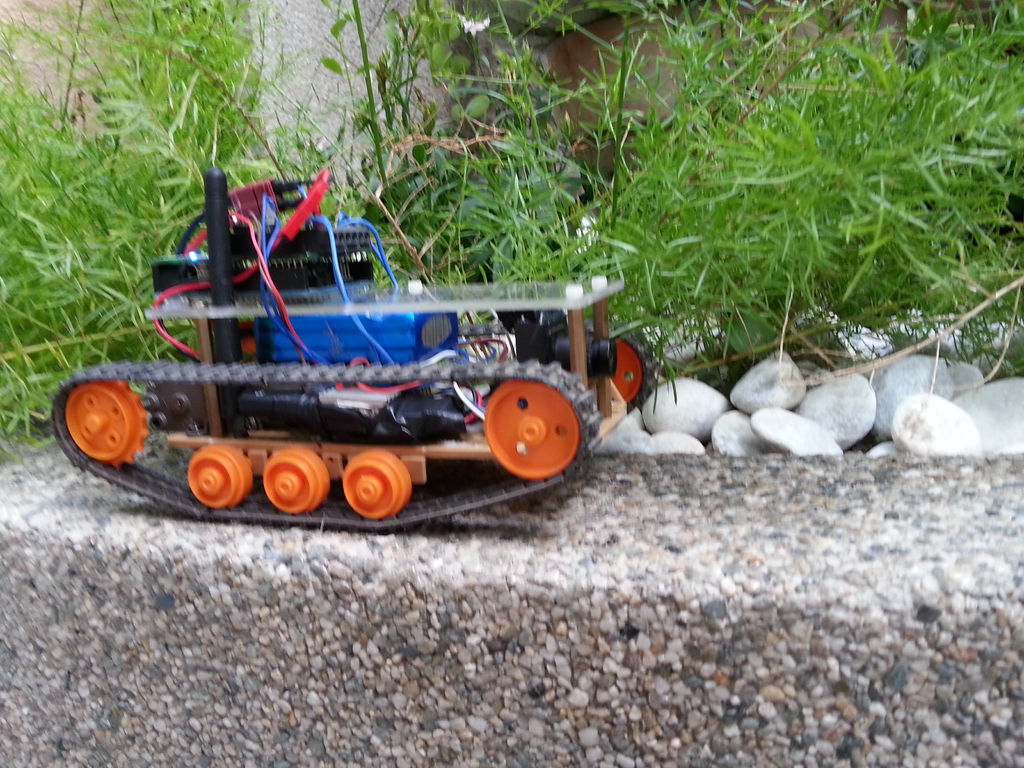



Остался лишь последний шаг — получить удовольствие от управления вашим новым танком-шпионом с камерой!

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник



