
Схемы простых передатчика и приемника для радиоуправления моделями (3 транзистора)
Для радиоуправления различными моделями и игрушками может быть использована аппаратура дискретного и пропорционального действия. Основное отличие аппаратуры пропорционального действия от дискретной состоит в том, что она позволяет по командам оператора отклонять рули модели на любой требуемый угол и плавно изменять скорость и направление ее движения «Вперед» или «Назад». Постройка и налаживание аппаратуры пропорционального действия достаточно сложны и не всегда под силу начинающему радиолюбителю. Хотя аппаратура дискретного действия и имеет ограниченные возможности, но, применяя специальные технические решения, можно их расширить. Поэтому далее рассмотрим однокомандную аппаратуру управления, пригодную для колесных, летающих и плавающих моделей.
Передатчик радиоуправляемой модели
Для управления моделями в радиусе 500 м, как показывает опыт, достаточно иметь передатчик с выходной мощностью окьло 100 мВт. Передатчики радиоуправляемых моделей, как правило, работают в диапазоне 10 м. Однокомандное управление моделью осуществляется следующим образом. При подаче команды управления передатчик излучает высокочастотные электромагнитные колебания, другими словами, генерирует одну несущую частоту. Приемник, который находится на модели принимает сигнал, посланный передатчиком, в результате чего срабатывает исполнительный механизм. В итоге модель, подчи-нясь команде, меняет направление движения или осуществляет одно какое-нибудь заранее заложенное в конструкцию модели указание. Используя однокомандную модель управления, можно заставить модель осуществлять достаточно сложные движения. Схема однокоманд-
ного передатчика представлена на рис. 22.4. Передатчик включает задающий генератор колебаний высокой частоты и модулятор. Задающий генератор собран на транзисторе VT1 по схеме емкостной трех-точки. Контур L2, С2 передатчика настроен на частоту 27,12 МГц, которая отведена Госсвязьнадзором электросвязи для радиоуправления моделями. Режим работы генератора по постоянному току определяется подбором величины сопротивления резистора R1. Созданные генератором высокочастотные колебания излучаются в пространство антенной, подключенной к контуру через согласующую катушку индуктивности L1. Модулятор выполнен на двух транзисторах VT1, VT2 и представляет собой симметричный мультивибратор. Модулируемое напряжение снимается с коллекторной нагрузки R4 транзистора VT2 и подается в общую цепь питания транзистора VT1 высокочастотного генератора, что обеспечивает 100% модуляцию. Управляется передатчик кнопкой SB1, включенной в общую цепь питания. Задающий генератор работает не непрерывно, а только при нажатой кнопке SB1, когда появляются импульсы тока, вырабатываемые мультивибратором. Посылка в антенну высокочастотных колебаний, созданных задающим генератором, происходит отдельными порциями, частота следования которых соответствует частоте импульсов модулятора.
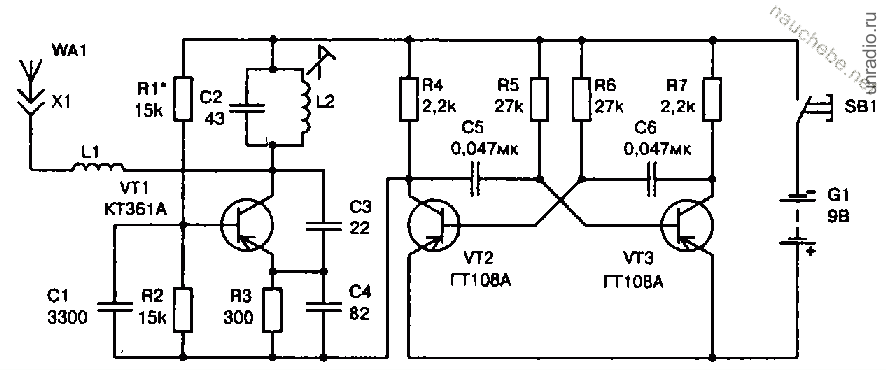
Рис. 22.4. Принципиальная схема передатчика радиоуправляемой модели
В передатчике использованы транзисторы с коэффициентом передачи тока базы Ь2іэ не менее 60. Резисторы типа МЛТ-0,125, конденсаторы — К10-7, КМ-6. Согласующая антенная катушка L1 имеет 12 витков ПЭВ-1 0,4 и намотана на унифицированном каркасе от карманного приемника с подстроечным ферритовым сердечником марки 100НН диаметром 2,8 мм. Катушка L2 бескаркасная и содержат 16 витков провода ПЭВ-1 0,8 намотанных на оправке 010 мм. В качестве кнопки управления можно использовать микропереключатель типа МП-7. Детали передатчика монтируют на печатной плате из фольгированного стеклотекстолита. Антенна передатчика представляет собой отрезок стальной упругой проволоки 01…2 мм и длиной около 60 см, которая подключается прямо к гнезду XI, расположенному на печатной плате. Все детали передатчика должны быть заключены в алюминиевый корпус. На передней панели корпуса располагается кнопка управления. В месте прохождения антенны через стенку корпуса к гнезду XI должен быть установлен пластмассовый изолятор, чтобы предотвратить касание антенны корпуса.
При заведомо исправных деталях и правильном монтаже передатчик не требует особой наладки. Необходимо только убедиться в его работоспособности и, изменяя индуктивность катушки L1, добиться максимальной мощности передатчика. Для проверки работы мультивибратора надо включить высокоомные наушники между коллектором VT2 и плюсом источника питания. При замыкании кнопки SB1 в наушниках должен прослушиваться звук низкого тона, соответствующий частоте мультивибратора. Для проверки работоспособности генератора ВЧ необходимо собрать волномер по схеме рис. 22.5. Схема представляет собой простой детекторный приемник, в котором катушка L1 намотана проводом ПЭВ-1 1…1,2 и содержит 10 витков с отводом от 3 витка.
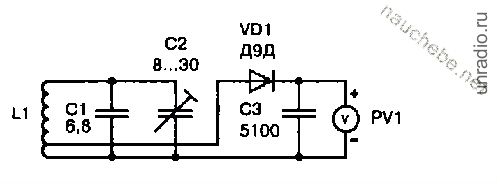
Рис. 22.5. Принципиальная схема волномера для настройки передатчика
Катушка намотана с шагом 4 мм на пластмассовом каркасе 025 мм. В качестве индикатора используется вольтметр постоянного тока с относительным входным сопротивлением 10 кОм/В или микроамперметр на ток 50…100мкА. Волномер собирают на небольшой пластине из фольгированного стеклотекстолита толщиной 1,5 мм. Включив передатчик, располагают от него волномер на расстоянии 50…60 см. При исправном генераторе ВЧ стрелка волномера отклоняется на некоторый угол от нулевой отметки. Настраивая генератор ВЧ на частоту 27,12 МГц, сдвигая и раздвигая витки катушки L2, добиваются максимального отклонения стрелки вольтметра. Максимальную мощность высокочастотных колебаний, излучаемых антенной, получают вращением сердечника катушки L1. Настройка передатчика считается оконченной, если вольтметр волномера на расстоянии 1…1,2 м от передатчика показывает напряжение не менее 0,05 В.
Приемник радиоуправляемой модели
Для управления моделью радиолюбители довольно часто используют приемники, построенные по схеме сверхрегенератора. Это связано с тем, что сверхрегенеративный приемник, имея простую конструкцию, обладает очень высокой чувствительностью, порядка 10…20 мкВ. Схема сверхрегенеративного приемника для модели приведена на рис. 22.6. Приемник собран на трех транзисторах и питается от батареи типа «Крона» или другого источника напряжением 9 В. Первый каскад приемника представляет собой сверхрегенеративный детектор с самогашением, выполненный на транзисторе VT1. Если на антенну не поступает сигнал, то этот каскад генерирует импульсы высокочастотных колебаний, следующих с частотой 60…100 кГц. Это и есть частота гашения, которая задается конденсатором С6 и резистором R3.
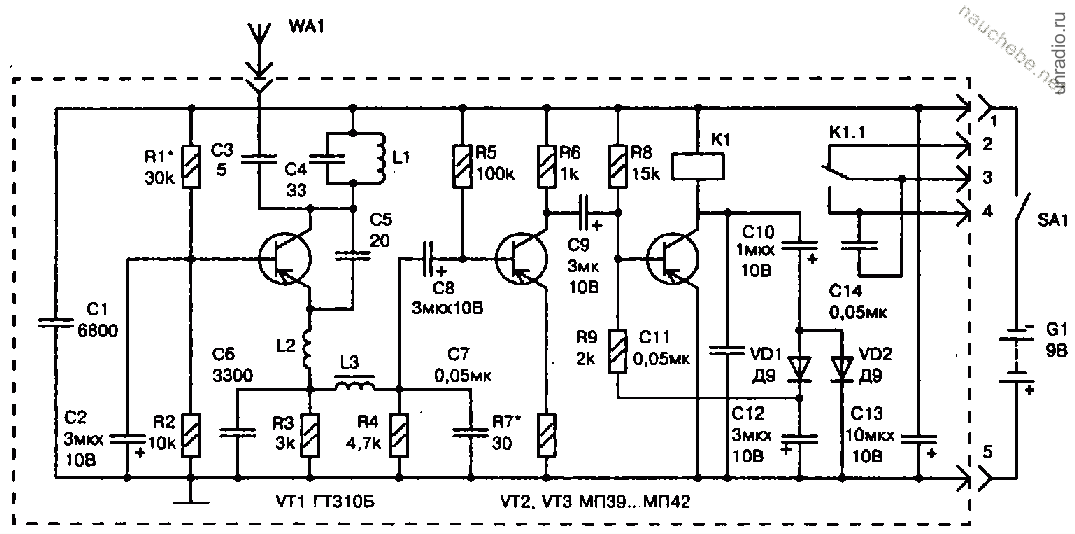
Рис. 22.6. Принципиальная схема сверхрегенеративного приемника радиоуправляемой модели
Усиление выделенного командного сигнала сверхрегенеративным детектором приемника происходит следующим образом. Транзистор VT1 включен по схеме с общей базой и его коллекторный ток пульсирует с частотой гашения. При отсутствии на входе приемника сигнала, эти импульсы детектируются и создают на резисторе R3 некоторое напряжение. В момент поступления сигнала на приемник продолжительность отдельных импульсов возрастает, что приводит к увеличению напряжения на резисторе R3. Приемник имеет один входной контур LI, С4, который с помощью сердечника катушки L1 настраивается на частоту передатчика. Связь контура с антенной — емкостная. Принятый приемником сигнал управления выделяется на резисторе R4. Этот сигнал в 10…30 раз меньше напряжения частоты гашения. Для подавления мешающего напряжения с частотой гашения между сверхрегенеративным детектором и усилителем напряжения включен фильтр L3, С7. При этом на выходе фильтра напряжение частоты гашения в 5… 10 раз меньше амплитуды полезного сигнала. Продетектированный сигнал через разделительный конденсатор С8 подается на базу транзистора VT2, представляющего собой каскад усиления низкой частоты, а далее на электронное реле, собранное на транзисторе ѴТЗ и диодах VD1, VD2. Усиленный транзистором ѴТЗ сигнал выпрямляется диодами VD1 и VD2. Выпрямленный ток (отрицательной полярности) поступает на базу транзистора ѴТЗ. При появлении тока на входе электронного реле, коллекторный ток транзистора увеличивается и срабатывает реле К1. В качестве антенны приемника можно использовать штырь длиной 70… 100 см. Максимальная чувствительность сверхрегенеративного приемника устанавливается подбором сопротивления резистора R1.
Монтаж приемника
Монтаж приемника выполняют печатным способом на плате из фольгированного стеклотекстолита толщиной 1,5 мм и размерами 100×65 мм. В приемнике используются резисторы и конденсаторы тех же типов, что и в передатчике. Катушка контура сверхрегенератора L1 имеет 8 витков провода ПЭЛШО 0,35, намотанных виток к витку на полистироловом каркасе 06,5 мм, с подстроечным ферритовым сердечником марки 100НН диаметром 2,7 мм и длиной 8 мм. Дроссели имеют индуктивность: L2 — 8 мкГн, a L3 — 0,07…0,1 мкГн. Электромагнитное реле К1 типа РЭС-6 с обмоткой сопротивлением 200 Ом. Настройку приемника начинают с сверхрегенеративного каскада. Подключают высокоомные наушники параллельно конденсатору С7 и включают питание. Появившийся в наушниках шум свидетельствует об исправной работе сверхрегенеративного детектора. Изменением сопротивления резистора R1 добиваются максимального шума в наушниках. Каскад усиления напряжения на транзисторе VT2 и электронное реле особой наладки не требуют. Подбором сопротивления резистора R7 добиваются чувствительности приемника порядка 20 мкВ. Окончательная настройка приемника производится совместно с передатчиком. Если в приемнике параллельно обмотке реле К1 подключить наушники и включить передатчик, то в наушниках должен прослушиваться громкий шум. Настройка приемника на частоту передатчика приводит к пропаданию шума в наушниках и срабатыванию реле.
Литература: В.М. Пестриков. Энциклопедия радиолюбителя.
Источник
Самодельная многоканальная аппаратура радиоуправления
На фотографиях в этой статье будет немного (много) «колхоза».
Мне понадобилось:
- Три микроконтроллера Arduino Nano
- Два радиомодуля NRF24l01 с усилителем и внешней антенной
- Три односторонние печатные платы 50х70мм
- Четыре потенциометра на 10кОм
- Четыре ручки для них
- Около 22 тактовых кнопок
- Четыре тумблера ON-OFF-ON
- Два двухосевых джойстика (лучше использовать не для геймпадов)
- И пины-соединители
- Стабилизаторы питания LM1117-3.3, или аналоги, и другие радиодетали
- Всякая мелочёвка: провода, паяльные принадлежности, клеи, скотчи и др.
->>> Arduino Nano на Паркфлаере
Процесс изготовления.
Начну с изготовления приёмника. Отрезал два куска по 15 пинов «мама», подключил на них Ардуино. На пины А0-А7 и D2-D8 включительно припаял тройной разъём «папа», где один ряд – сигнальный с Ардуино (отдельный с каждого пина на Дуине), средний – +5В в параллель, крайний, который ближе к названию пина на Ардуино – земля (GND) в параллель.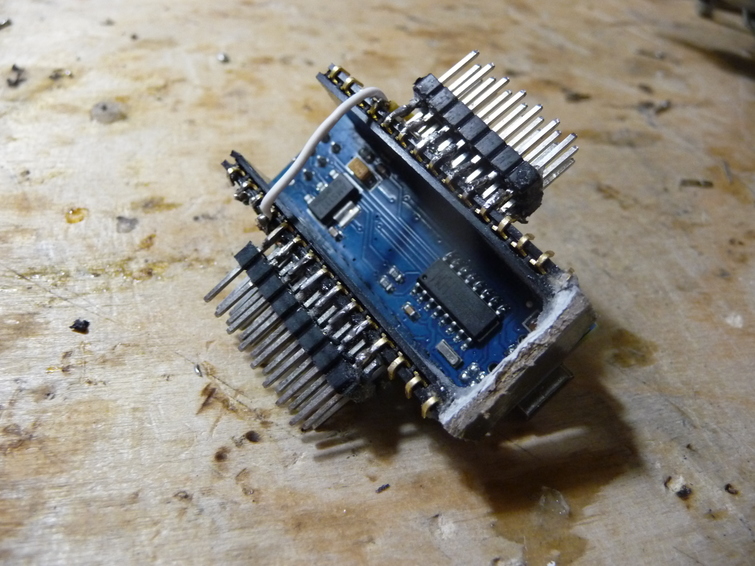
На пины D9-D13 включительно припаял радиомодуль по схеме, но питание впаял в стабилизатор напряжения, на выходе которого электролитический конденсатор 16В 100мкФ и керамический на 100нФ. На вход стабилизатора повесил керамический конденсатор 100нФ (пусть будет). Вход стабилизатора припаял к пину +5В (питаться приёмник будет от регуля напряжением 5В; его надо будет подключить на пин мотора).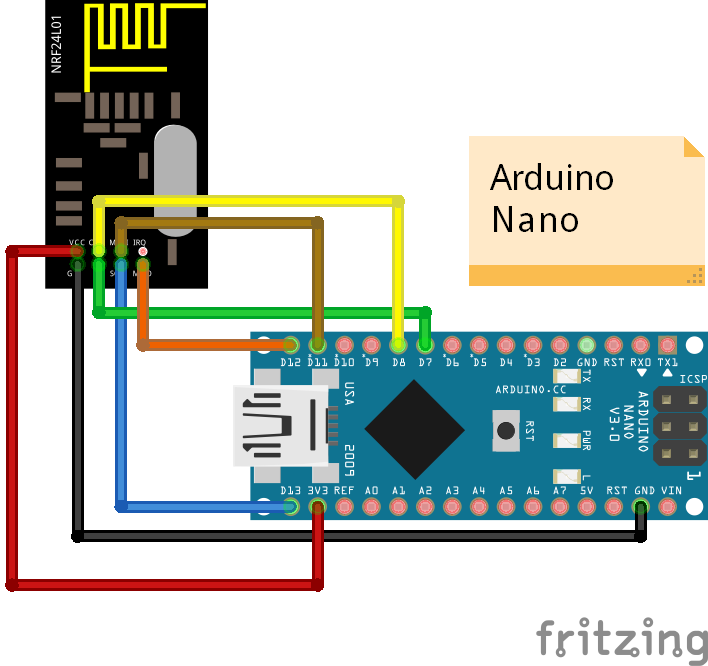
Приклеил радиомодуль к пинам и Ардуино на суперклей с пищевой содой, использованной в качестве отвердителя. Потом я всё залил горячими соплями (термоклеем) для надёжности.
Обратите внимание: пины D0 и D1 (RX и TX) свободны, на них я не паял пины для подключения электроники авиамодели (хотя туда можно подключать электронику). Сделал я это для того, чтобы можно было в далбнейшем подключить вторую Ардуину по Serial для увеличения количества пинов и расширения функционала.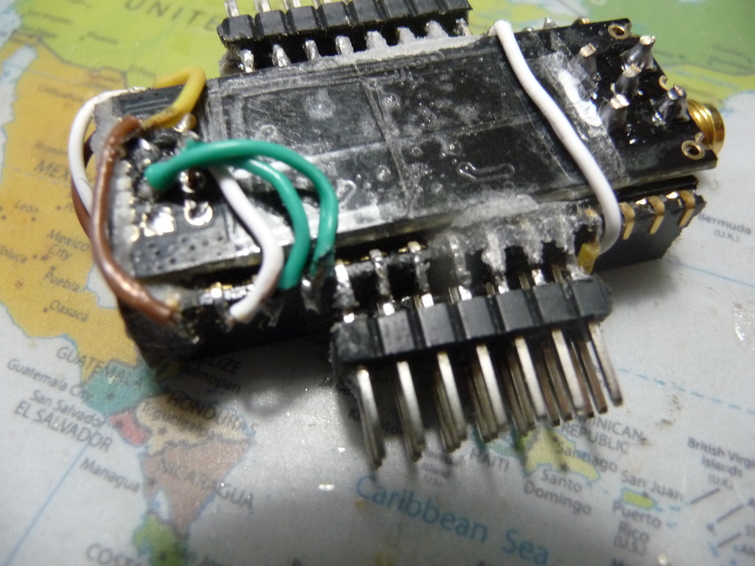
Теперь принимаюсь за передающую часть. Сначала надо было модифицировать джойстик газа, чтоб он был с фиксацией. Для этого я сначала его разобрал и надфилем подточил с двух противоположных краёв стик (он лежит по центру), который скользит по подпружиненной плошадке. Далее собрал его обратно. 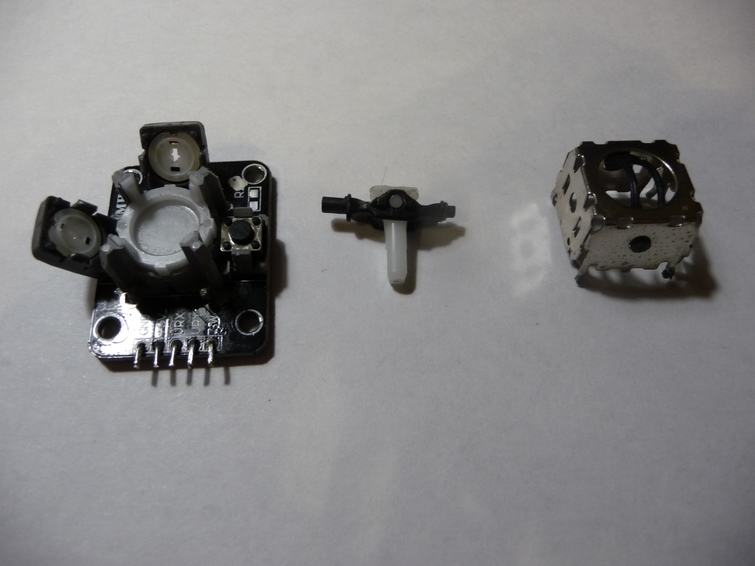
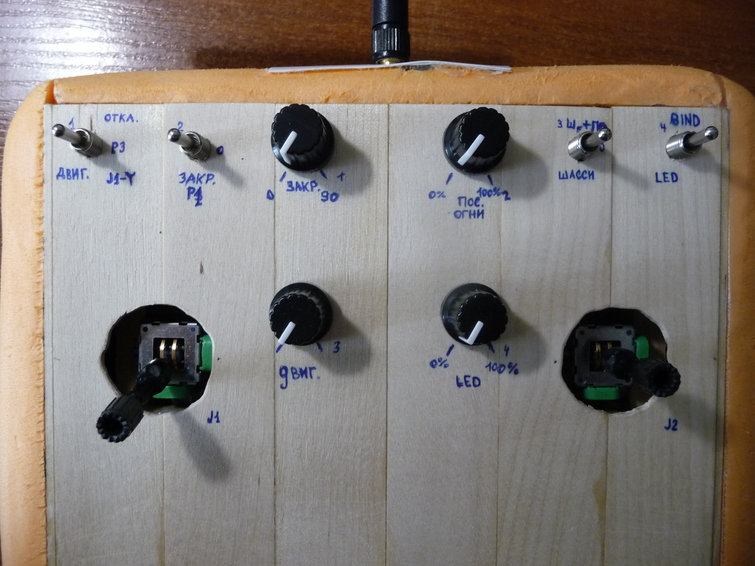
Потом изготовил пульт (корпус передатчика) из нескольких линеек по 20см. Начал с лицевой части. Супеклеем склеил 6 линеек торцами воедино, чтобы получилась досочка (можно было использовать фанеру, но у меня её не было). Просверлил по кругу несколько отверстий, выковырял центральную часть кусачками-бокорезами и канцелярским ножом, выровнял отверстия полукруглым надфилем. Укрепил швы суперклеем с содой в нескольких местах каждый.

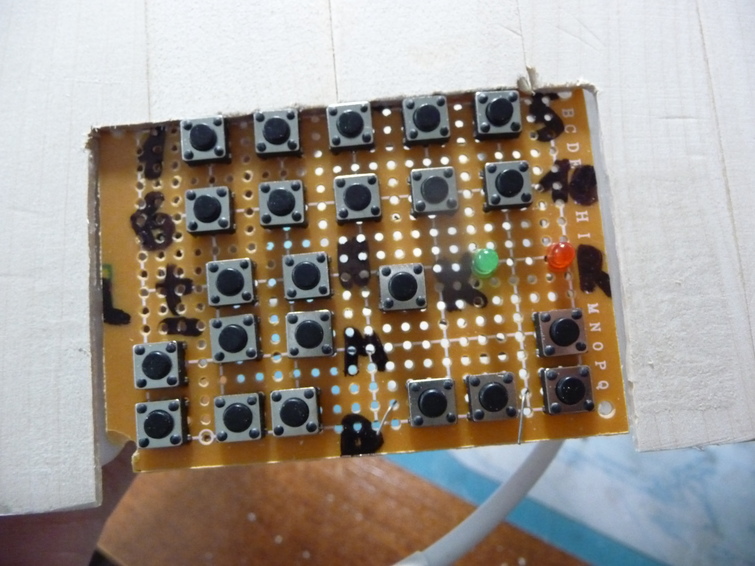
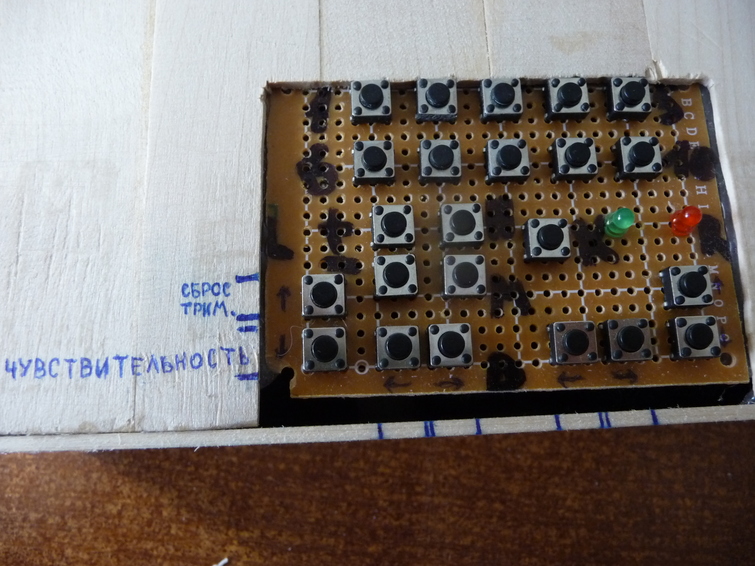
Просверлил отверстия для потенциометров и тумблеров, вкрутил всё это на свои места и изнутри залил термоклеем. Заранее припаял к тумблерам и потенциометрам провода с термоусадкой и пинами «мама». Установил стойки для джойстиков (припаял к ним провода тоже заранее) и выпилил прямоугольник для кнопочной площадки (она с общей землёй), устанавливал её с помощью горячих соплей.

Прикрепил боковые стенки и днище на термоклей:

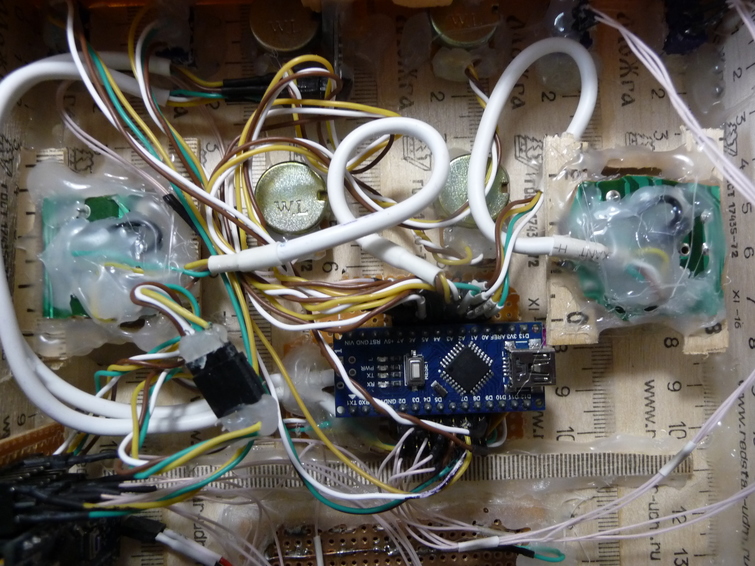
Далее спаял на макетной плате конструкцию, напоминающую приёмник, но с шлейфом проводов «+5В–TX–RX–GND» и выходом с пинами для подключения радиомодуля всё по той же схеме. Думал, что буду питать МК через повышающий до 7-8В модуль (бустер) от одного Li-Ion аккумулятора (3-4,2В), но потом увидите, чем я его заменил.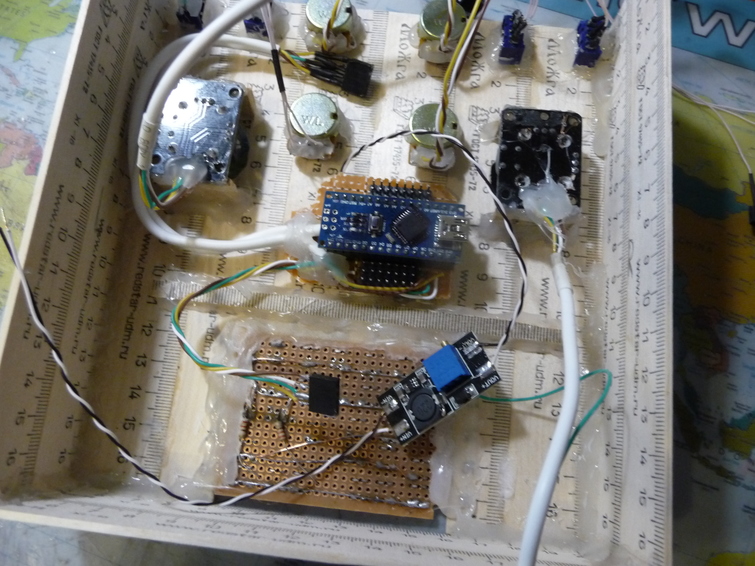
Спаял на третьей макетной плате конструкцию с 20 выходами (радиомодуль на эту Дуину не надо будет вешать, поэтому пины D9-D13 включительно освобождаются), шлейфом «+5В–RX–TX–GND» (. соединять Ардуины друг с другом надо так: TX одной идёт в RX другой, и наоборот; +5В и GND просто для питания) и штекером для питания, в параллель которому припаян керамический конденсатор на 100нФ (чтобы сглаживать скачки напряжения от бустера).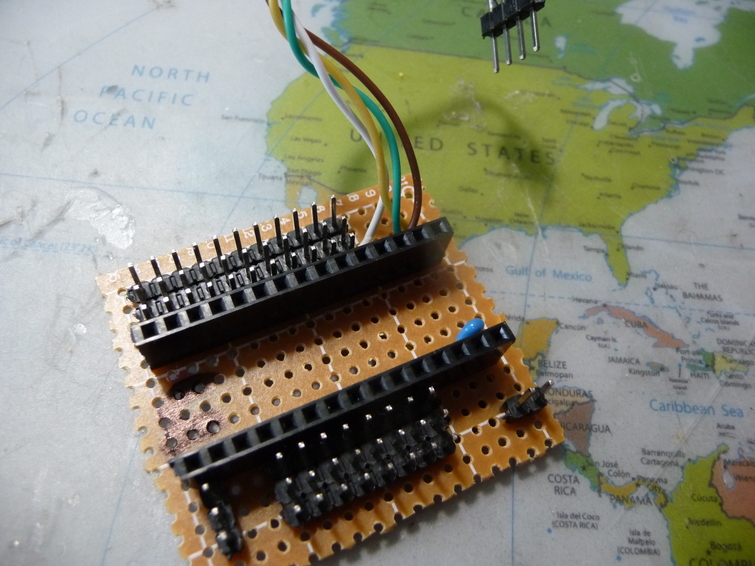
Припаял к кнопочной площадке множество проводков, на каждую кнопку по одному, которые пойдут на сигнальные пины Ардуино; общий минус можно втыкать на любой крайний контакт. К светодиодам тоже припаял проводок на «плюс» со штекером «мама», «минус» соединён с общей шиной «минус».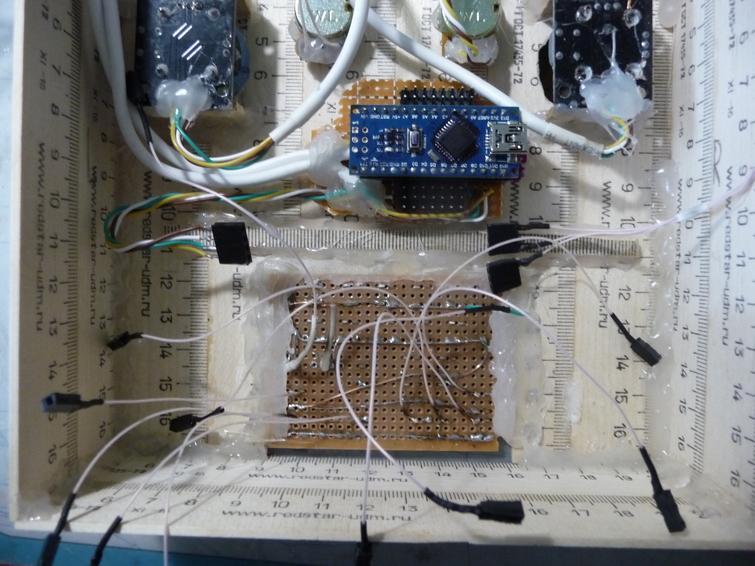
Сделал из 2см пеноплекса боковые стенки и верхушку, обрезав углы ножом и обточив наждачкой. Присоединил боковые куски на двусторонний скотч, в верхушке сделал отверстие для антенны и радиомодуля. Приклеил верхушку на термоклей к остальному корпусу.



Чтоб было более красиво, наклеил на эту дырень кусок белого тонкого пластика на двусторонний скотч с отверстием для антенны.
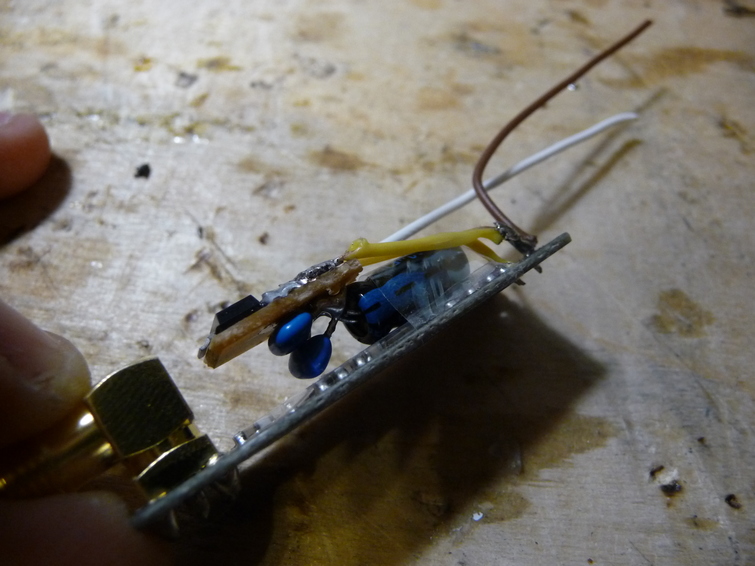
Нанёс визит к моему другану, рассказал ему о том, что я делаю, и он отдал мне старый пульт от сломанного вертолётика на радио со словами: «На, пригодится». И вправду, мне пригодились антенна (вертолётик был 2,4ГГц) и джойстики, причём газ уже был с фиксацией. Установил джойстики вместо тех с Алиэкспресса, на приёмник припаял отданную антенну (просто она была более длинной, т.к. там был 5см кусок коаксиального провода, который очень хорошо гнулся). На пульт нанёс надписи рядом с джойстиками, тумблерами, потенциометрами и кнопками.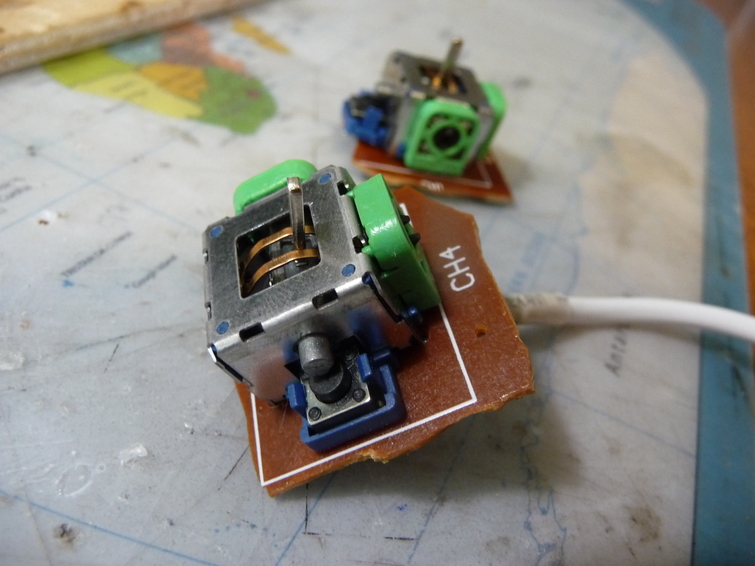


Для питания использую холдер последовательного соединения для аккумуляторов формата 18650 с Li-Ion аккумуляторами. На холдер приклеил сложенный вдвое липкой стороной внутрь скотч для лёгкого вынимания аккумов, сам холдер держится за липучку, приклеенную на самого него и на корпус передатчика.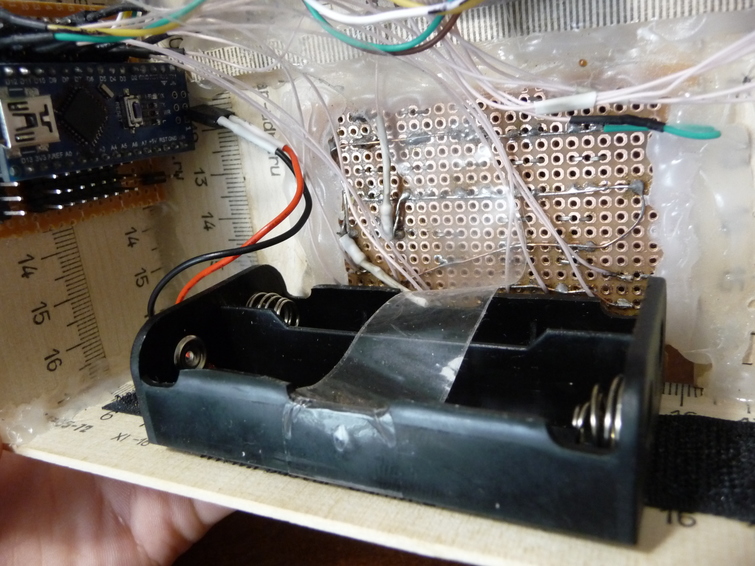
Далее приступил к написанию прошивки для аппаратуры в Arduino IDE. Писал три файла .ino: «Transmitter_1» для дуины с кнопками и светодиодами, «Transmitter_2» для дуины с радиомодулем, джойстиками, тумблерами и потенциометрами, «Receiver» для приёмника. В скетчах очень много комментариев для того, чтобы можно было разобраться что где происходит.
Разберём сначала код в файле «Transmitter_1». Для упрощения обработки нажатий на кнопки (или переключения тумблеров) я написал функцию, в параметр которой вписывается пин, с которого надо считывать сигнал, и которая возвращает 0 или 1 (можно было использовать тип данных boolean (8 бит), но потом могут возникнуть проблемы с передачей по Serial, поэтому выбрал byte (8 бит)):
byte bt( int pin) < //тип данных возвращаемого значения byte
pinMode (pin, INPUT_PULLUP );
boolean bt_state = ! digitalRead (pin);
if (bt_state == 1) <
return 1;
> else <
return 0;
>
>
Для простого зажигания зелёного светодиода написал эту функцию:
void ledon() <
pinMode (3, OUTPUT ); //устанавливаем пин 3 как выход
digitalWrite (3, HIGH ); //зажигаем
delay (150); //ждём
digitalWrite (3, LOW ); //гасим
delay (200); //ждём
>
Эта функция ничего не возвращает, поэтому прописываем «void». Остальной код элементарный и ничего примечательного в нём нет.
Переходим к разбору кода файла «Transmitter_2». В нём используется библиотека «EEPROM» для запоминания значений триммеров. В функции bt() из кода «Transmitter_1» я изменил только тип возвращаемого значения с byte на boolean. Для перевода значений с потенциометров и джойстиков написана функция toservo(), которая принимает пин потенциометра, нижнее значение с потенциометра, верхнее значение с него же и диапазон возвращаемых значений. Функция возвращает значения типа byte.
byte toservo( int potpin, int low, int high, int range) <
int lowr = (180 — range) / 2;
int highr = 180 — ((180 — range) / 2);
return map ( analogRead (potpin), low, high, lowr, highr);
>
Для регулировки яркости всяческой подсветки и иллюминации написана функция toaw(), которая принимает в параметрах пин потенциометра, с которого надо считывать сигнал. Возвращает значения типа byte в диапазоне 0-255. Далее на приёмнике активируется функция analogWrite(), которая создаёт ШИМ на заданном пине.
byte toaw( int potpin2) <
return map ( analogRead (potpin2), 0, 1023, 0, 255);
>
Настройки радиомодуля с помощью библиотек «nRF24l01» и «RF24» спёрты у AlexGyver’а.
Настал черёд приёмника. В его коде ничего примечательного нет, кроме функции биндинга. Если тумблер 4 находится наверху (причём передатчик включен заранее) и включается приёмник, приходит сигнал состояния тумблера 4 и запускается функция биндинга:
boolean motor_flag = 0; //флаг биндинга регуля, по умолчанию опущен
void bind()<
//функция ничего не принимает и ничего не возвращает
servo_0. writeMicroseconds (2300);
delay (3000);
servo_0. writeMicroseconds (800);
delay (5000);
motor_flag = 1; //поднимаем флаг
>
Небольшой туториал:
- Если первый тумблер находится в верху, двигатель отключен. Если он находится в центральном положении, двигатель управляется потенциометром № 3. Если же он находится внизу, двигатель управляется левым (№ 1) джойстиком по вертикальной (Y) оси.
- Если третий тумблер находится вверху, выпускаются шасси и зажигаются посадочные огни. Если он внизу, то только выпускаются шасси.
- Для биндинга после включения передатчика надо перевести тумблер № 4 в верхнее положение, включить приёмник, подождать 8 секунд.
- Для регулировки яркости посадочных огней надо включить их третьим тумблером, поворачивать второй потенциометр.
- Для регулировки яркости иллюминации включить её четвёртым тумблером, поворачивать четвёртый потенциометр.
- Для регулировки угла выпуска закрылков, включить их с помощью второго тумблера, поворачивать первый потенциометр.
- Для триммировки использовать соответствующие кнопки на кнопочной площадке.
- Для сброса триммера определённой оси надо зажать кнопку «сброс триммеров», нажать любую из двух кнопок оси, триммер которой надо сбросить.
- Для выбора чувствительности зажать кнопку «чувствительность», нажать кнопку (0/1/2/3) желаемой чувствительности, где: 0 – самый лучший отклик, 3 – самый слабый отклик.
Результат:
Получилась многоканальная (до 32 аналоговых (или цифровых, как сами пожелаете)) аппаратура радиоуправления с несколькими «плюшками» на борту: есть триммеры осей управления (которые не сбрасываются при отключении и можно сбросить отдельно каждый), четыре (0/1/2/3) степени чувствительности (отклика), функция автоматического биндинга регулятора оборотов. В моём варианте аппы реализовано только 8 каналов, а это всего лишь ¼ всех возможных. 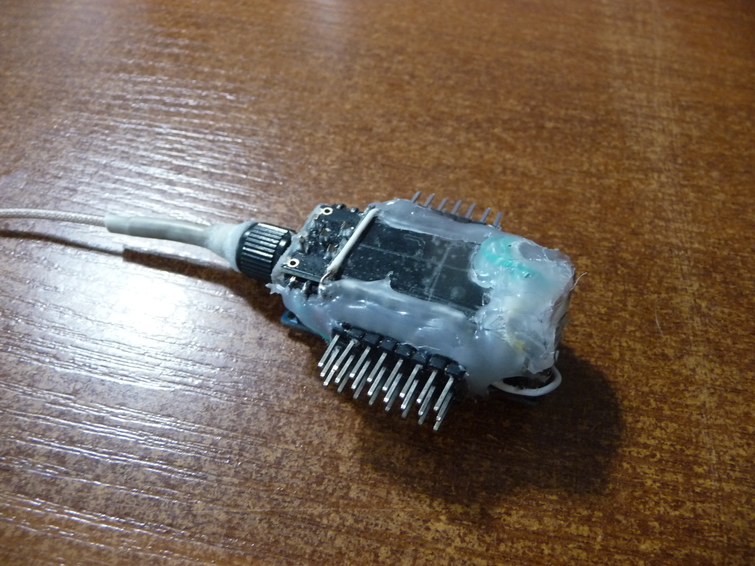

Послесловие.
В дальнейших моих планах разработка прошивки с меню (придётся припаять проводки с термоусадкой на оставшиеся кнопки и подключить их на «Transmitter_1»), в котором можно будет настроить диапазон поворота сервопривода определенного канала, фейлсейф (приведение всех каналов в заданное заранее положение при потере сигнала), оповещение о разрядке аккумулятора на модели и др.
Прошивки лежат в архиве на Гугл Диске.
Распиновка (чё куда подключать) для версии прошивки 1.1 в виде таблицы лежит здесь.
О дальности сигнала есть видео у AlexGyver’a (включайте видео на 13 минут 29 секунд, именно в этом месте начинается «тест»):
Испытание самодельной аппаратуры радиоуправления*. #1:
*качалки было лень ставить
Испытание самодельной аппаратуры радиоуправления. #2:
Выражаю благодарность в содействии созданию этого устройства:
Родным за терпение,
Александру Майорову (AlexGyver’у) за предоставленные в описаниях к видео скетчи,
Ивану Хмелевскому за то, что выслушивал, когда я ему поведывал о каждом новом этапе создания аппы.
Всем, кто прочитал данную статью, огромное СПАСИБО!
Источник



