
- Миниатюрный робот Microbot своими руками
- Как сделать робота своими руками: схемы, проекты и подробная инструкция как создать робота (115 фото и видео)
- Нюансы создания роботов
- Бумажный робот
- Вязаный робот Биби
- Робот из спичечных коробков
- Мобильный робот
- Как собрать робота самостоятельно в домашних условиях: от простого к сложному
- Робот, реагирующий на источник света
- Необходимые инструменты и детали
- Процесс сборки
- Робот, различающий препятствия
- Инструменты и запчасти
- Работа с платой
- Управление двигателями
- Установка датчиков препятствий
- Прошивка робота
- Роботы для детей
- Полезные роботизированные устройства для начинающих
- Необходимые навыки
Миниатюрный робот Microbot своими руками

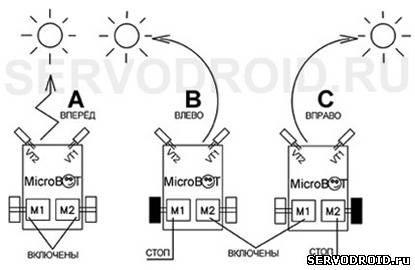
Робот Microbot является простым маленьким роботом, которого можно изготовить своими руками. Его высота составляет порядка 12 мм, ширина 20 мм, а длина печатной платы всего 35 мм. Особенность такого робота в том, что он умеет двигаться за источником света. Стоит перед роботом засветить фонариком, он тут же начинает двигаться к свету, это чем-то напоминает игру с кошкой лазерной указкой. Также робот реагирует и на солнечные лучи, поэтому бывает сложно предположить, как он себя будет вести. Передвигается робот только на ровной гладкой поверхности.
В качестве «мышц» робот использует миниатюрные моторчики, которые можно найти в старых мобильных телефонах.
Устройство робота и функции:
В техническом плане робот состоит из двух печатных плат разных по размеру. Платы соединяются при помощи припоя. На поверхности робот удерживается благодаря трем точкам опоры, при этом две точки опоры — это валы моторчиков, они и двигают робота. Так как размеры робота небольшие, то в качестве питания здесь используется плоская батарейка с питанием в 3В.
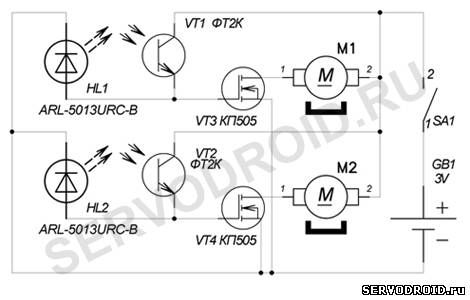
Свет робот чувствует очень сильно. Робот отлично улавливает не только прямое попадание света на него, но также видит тот свет, который исходит от светового пятна.
На роботе установлено два светодиода. Если посветить с правой стороны от самоделки, робот начинает двигаться вправо и на нем загорается правый светодиод. Соответственно если светить с левой стороны, то загорается левый светодиод и робот едет влево.

Шаг первый. Добываем моторчики
Нужные моторчики можно найти в старых мобильных телефонах. Они здесь нужны для того, чтобы создавать вибрации, на их валы надеты эксцентрики. Самый ответственный здесь момент — это правильно снять эксцентрик. Если стягивать его плоскогубцами или иным подобным способом, моторчик придет в негодность. Для того чтобы снять эксцентрик, его нужно зажать в тиски или взять плоскогубцами. Далее берется шило или большая иголка и с помощью нее нужно выбить вал из эксцентрика. Работать нужно осторожно, так как можно легко повредить контакты или корпус моторчика.

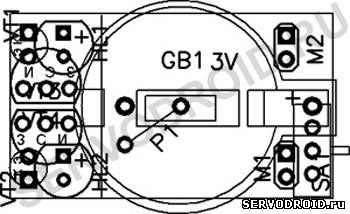
Особое внимание нужно уделить моменту установки фототранзисторов. Их нужно установить таким образом, чтобы длина выводов составила около 15мм, и после этого разогнуть в разные стороны на 30-35 градусов. Что касается перемычки Р1, то ее можно заменить любым кусочком провода. Перемычку нужно сделать раньше, чем будет установлен футляр, иначе после этого ее установка будет невозможной.
Еще один момент касается выключателя, он имеет три выхода. Центральный его вывод замыкается в зависимости от того, как расположена ручка-ползунок, это или правый или левый контакт. В цепи будет использоваться лишь два вывода, это центральный и любой боковой. Для того чтобы переключатель встал на свое место как положено, один его контакт нужно отрезать. Или же можно использовать иной микропереключатель небольших размеров.
Шаг третий. Установка двигателей
Двигатели устанавливаются на площадки со стороны токоведущих дорожек. Для крепления моторчиков автор использовал канцелярские скрепки. Ее нужно выгнуть в виде буквы П и затем залудить в необходимых местах. Впоследствии скрепка припаивается к площадке для монтажа двигателя.
Припаивать скрепку к двигателю нужно как можно быстрее, иначе моторчик может перегреться и выйдет из строя. Пайку лучше всего производить при помощи плоскогубцев. Далее моторчикам дают остыть и скрепки выгибают так, как это необходимо.
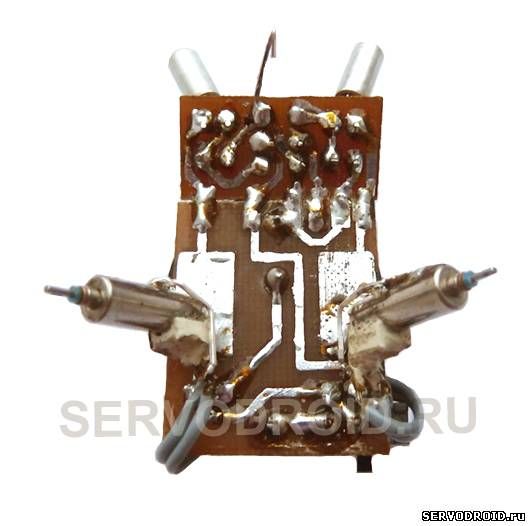
После того как моторчики будут установлены, их останется подключить. Для этого провода подключают к контактам платы М1 и М2. Лучше всего для подключения использовать тоненькие многожильные провода.
В заключении обе платы соединятся между собой. Малая плата ставится под углом к большей и затем припаивается. При этом нужно быть крайне осторожным, чтобы не замкнуть контакты.
Шаг четвертый. Заключительный этап
Теперь нужно создать для робота третью точку опоры. Для этих целей автор использовал контакт от конденсатора. Высоту ножки нужно подбирать индивидуально, от нее зависит центра масс и как следствие вся работа робота. Скорость робота можно регулировать путем изменения угла моторчиков.
Источник
Как сделать робота своими руками: схемы, проекты и подробная инструкция как создать робота (115 фото и видео)
Сегодня в списке детских предпочтений плюшевый медведей и зайцев потеснил новый персонаж – робот. Магазинные полки ломятся от огромного количества разных моделей киборгов, андроидов, трансформеров.

Однако стоят «умные машины» весьма прилично. Поэтому всё больше родителей предпочитают сделать робота из подручных средств своими руками.

Краткое содержимое обзора:
Нюансы создания роботов
Из чего можно сделать робота своими руками? Это зависит от того, кто будет этим заниматься.

Если ребёнок, то его родителям следует предложить ему внимательно просмотреть модели из ненужных коробок, картона, бумаги, спичечных коробков, сигаретных пачек, пластиковых бутылок, съедобной мастики, чтобы выбрать подходящий вариант.

Маме легче создать для ребёнка вязаного или съедобного киборга. А если созданием робота планирует заняться папа, то чадо может рассчитывать на более сложную конструкцию, например, получить высокотехничного андроида.

Бумажный робот
Подготовьте:
- бумагу формата А4;
- ножницы;
- клей.
Также вам потребуется цветной принтер. Создание подобной поделки учит ребёнка быть терпеливым, усидчивым и аккуратным. Ничего сложно в процессе изготовления здесь нет.

Разберём инструкцию, как сделать робота из бумаги своими руками:
- Распечатать цветной шаблон робота. Схему можно отыскать в Интернете.
- Аккуратно вырезать по контуру составные элементы и согнуть их по обозначенным линиям.
- Собрать фигурку. Для этого нужно промазать припуски на каждой заготовке клеем. Склеивать детали желательно начать с головы. Затем ноги, руки, тело. Все углы должны быть прямыми. Припуски нужно спрятать внутрь.
- Добавить декора. Это могут быть вставки из фольги или цветного картона, пластиковые элементы

Вязаный робот Биби
Это ещё один ответ на вопрос, как легко сделать робота своими руками. Такая поделка обязательно понравится вашему ребёнку, ведь это герой известного среди детей мультсериала «Смешарики».

Вязание круглой фигурки не представляет собой ничего сложного. Вам потребуется:
- крючок;
- цветная пряжа;
- наполнитель;
- картон;
- немного проволоки.

Подберите в Интернете понравившуюся схему и приступайте к вязанию. В антенну вставьте проволоку. Так её станет можно загибать.

Картон понадобится при изготовлении ножек. В конце работы не забудьте аккуратно отрезать нитки и заправить их внутрь.
Робот из спичечных коробков
Такая самоделка до неприличия проста в изготовлении, но очень симпатична. Она создаётся из девяти коробков, цветной бумаги и клея.

Коробки нужно обклеить цветной бумагой и сформировать из них фигурку робота. Не забудьте прорисовать лицо фломастером, и прикрепить антенны из спичек.

Мобильный робот
Теперь рассмотрим, как сделать робота в домашних условиях своими руками так, чтобы он отвечал последнему слову техники. Подготовьте:
- провод – 2 шт.;
- моторчик – 1 шт.;
- батарейку AA;
- канцелярские кнопки – 3 шт.;
- пенокартон – 2 куска;
- головные части старых зубных щёток – 3 шт.

Порядок действий:
- Присоедините батарейку к мотору. В качестве промежуточного слоя между ними вставьте кусок пенокартона. Фиксацию проводите при помощи клея.
- Займитесь устройством дестабилизатора. С этой целью наденьте на ось моторчика небольшой кусок пенокартона вытянутой формы и закрепите его на клей. На кончик дестабилизатора приклейте какое-либо украшение. Так вы увеличите амплитуду его движения.
- Снабдите андроида конечностями. Для этого приклейте головки от зубных щёток к нижней стороне моторчика. Роль прослойки отдайте пенокартону.
- Припаяйте отрезки провода к контактам мотора.
- Конец одного из проводов приклейте к одному из концов батарейки.
- Возьмите две бусины и прикрепите их к торцу батарейки. Это будут глаза.
- Запустите робота. Для этого свободный конец провода подсоедините к свободному контакту батарейки и зафиксируйте скотчем. Создание андроида завершено.

Вот мы и рассмотрели самые популярные способы, как сделать робота ребенку своими руками.

Главное, что следует запомнить – в изготовлении подобных поделок нет ничего трудного.
Источник
Как собрать робота самостоятельно в домашних условиях: от простого к сложному
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Источник



