
Segway (гироскутер) своими руками
В этой статье будет рассмотрено создание самобалансирующегося средства передвижения или просто «Сегвей». Практически все материалы для создания данного устройства легкодоступны.
Само устройство представляет из себя платформу на которой стоит водитель. Путем наклона туловища осуществляется управление двумя электрическими двигателями посредством цепи схем и микроконтроллеров, отвечающих за балансировку.

-Беспроводной модуль управления XBee.
-микроконтроллер Arduino
-аккумуляторы
-датчик InvenSense MPU-6050 на модуле “GY-521”,
-деревянные бруски
-кнопка
-два колеса
и прочее, указанное в статье и на фотографиях.
Шаг первый: Определение требуемых характеристик и проектирование системы.
При создании этого устройства автор старался, чтобы оно укладывалась в такие параметры как:
-проходимость и мощность, необходимая для свободного перемещения даже по гравию
-аккумуляторы достаточной емкостью, чтобы обеспечить как минимум один час беспрерывной работы устройства
-обеспечить возможность беспроводного управления, а так же фиксирование данных о работе устройства на SD-карту для выявления и устранения неисправностей.
Кроме того желательно, чтобы затраты на создание подобного устройства были меньше чем заказ оригинального внедорожного гироскутера.
Согласно приведенной ниже диаграмме, вы можете увидеть схему электрической цепи самобалансирующегося транспортного средства.
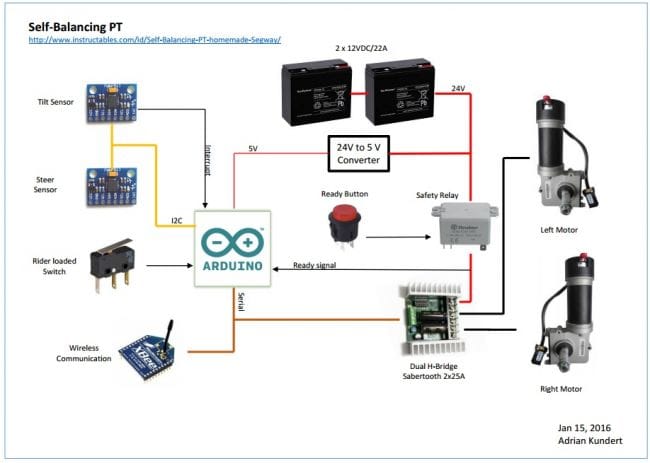
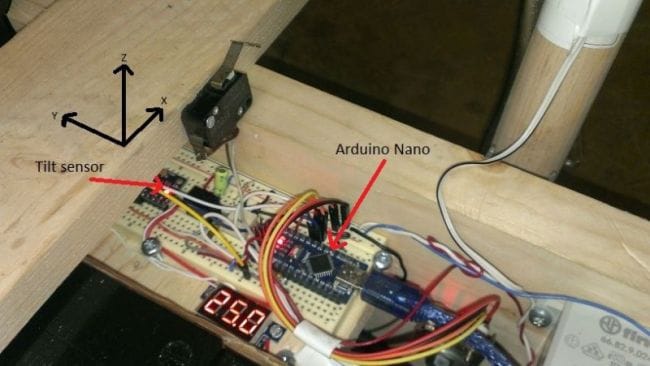
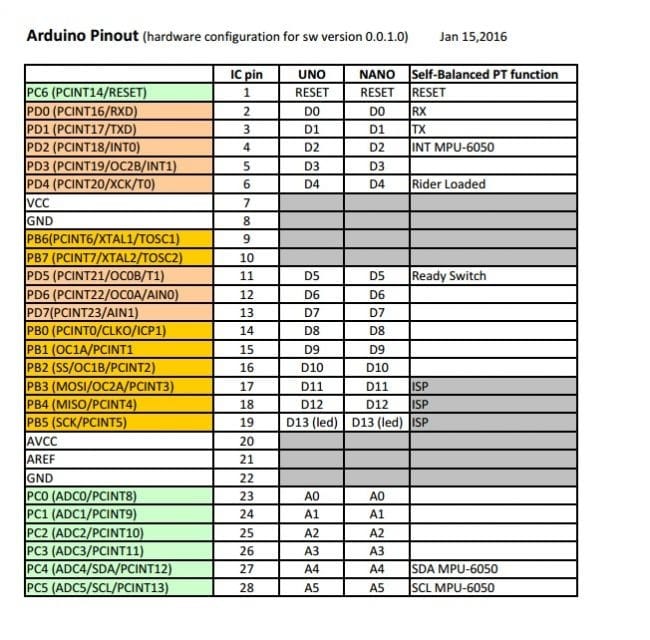
Выбор микроконтроллера для управления системами Сегвея разнообразен, автор система Arduino наиболее предпочтительна из-за своих ценовых категорий. Подойдут такие контроллеры как Arduino Uno, Arduino Nano или можно взять ATmega 328 для использования в качестве отдельного чипа.
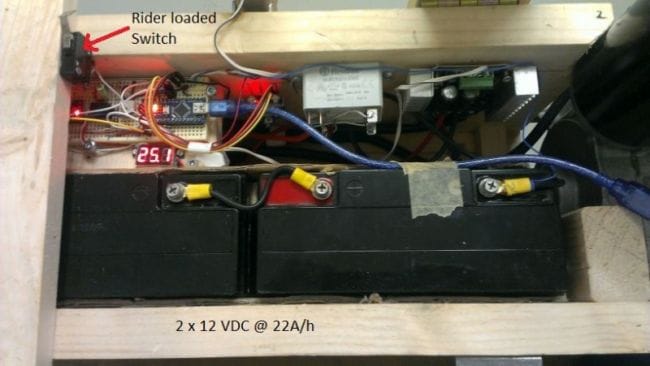
Чтобы запитать сдвоенную мостовую схему управления двигателей необходимо напряжение питания в 24 В, этого напряжения легко достигнуть путем последовательного подключения 12 В автомобильных аккумуляторов.
Система построена так, что питание на двигатели подается, только пока нажата кнопка старта, поэтому для быстрой остановки достаточно просто ее отпустить. При этом платформа Arduino должна поддерживать последовательную связь, как с мостовой схемой управления двигателей, так и с беспроводным модулем управления.
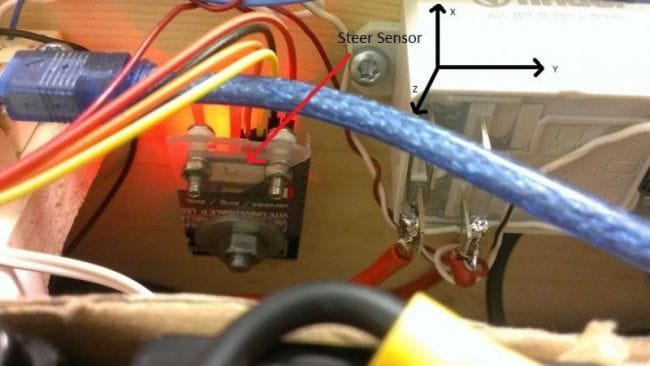
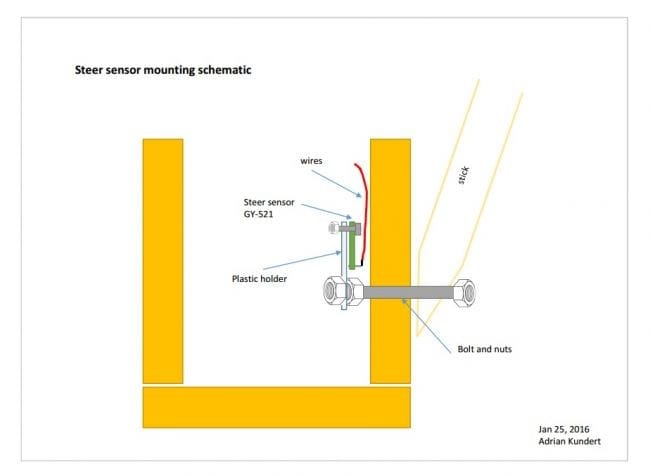
За счет датчика InvenSense MPU-6050 на модуле “GY-521”, обрабатывающего ускорение и несущего в себе функции гироскопа, измеряются параметры наклона. Датчик был расположен на двух отдельных платах расширения. По шине l2c поддерживается связь с микроконтроллером Arduino. Причем датчик наклона с адресом 0x68 был запрограммирован таким образом, чтобы выполнять опрос каждый 20 мс и обеспечивать прерывание микроконтроллера Arduino. Другой датчик имеет адрес 0x69 и он подтянут прямо к Arduino.
Когда пользователь встает на платформу скутера, срабатывает концевой выключатель нагрузки, который и активирует режим алгоритма для балансировки Сегвея.
Шаг второй: Создание корпуса гироскутера и установка основных элементов.



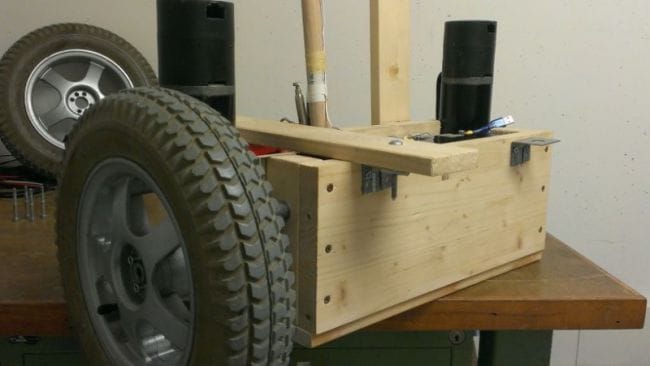


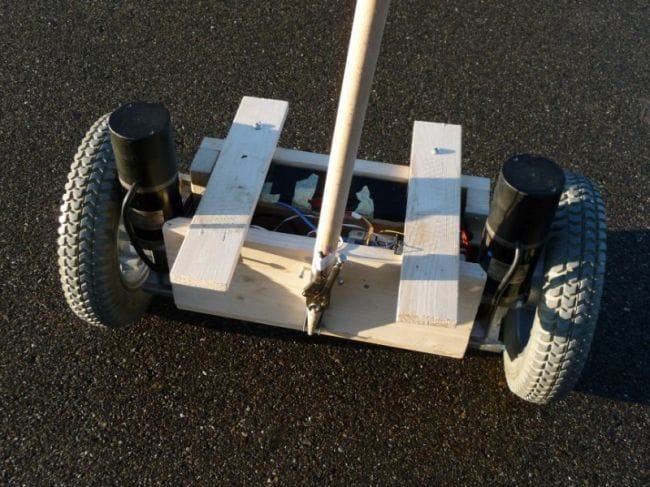
После определения основной концепции схемы работы гироскутера, автор приступил к непосредственной сборке его корпуса и установке основных деталей. В качестве основного материала послужили деревянные доски и бруски. Дерево мало весит, что положительно отразится на длительности заряда аккумуляторов, кроме того древесина легко обрабатывается и является изолятором. Из этих досок был сделан короб, в который будут устанавливаться аккумуляторы, двигатели и микросхемы. Таким образом, получилась U-образная деревянная деталь, на которую за счет болтов крепятся колеса и двигатели.
Передача мощности двигателей на колеса будет идти за счет зубчатой передачи. Во время укладки основных компонентов в корпус Сегвея очень важно проследить, чтобы вес распределялся равномерно при приведении Сегвея в рабочее вертикальное положение. Поэтому если не учесть распределение веса от тяжелых аккумуляторов, то работа балансировки устройства будет затруднена.
В данном случае автор расположил аккумуляторы сзади, так, что компенсировать вес двигателя, который находится в центре корпуса устройства. Электронные составляющие устройства были уложены в место между двигателем и аккумуляторами. Для последующего тестирования так же была прикреплена временная кнопка старта на ручке Сегвея.
Шаг третий: Электрическая схема.

Шаг четвертый: Тестирование и настройка устройства.
После проведения предыдущих этапов, автор получил модель Сегвея для тестирования.
При проведении тестирования важно принять во внимание такие факторы как безопасность зоны тестирования, а так же защитная экипировка в виде защитных щитков и шлема для водителя.
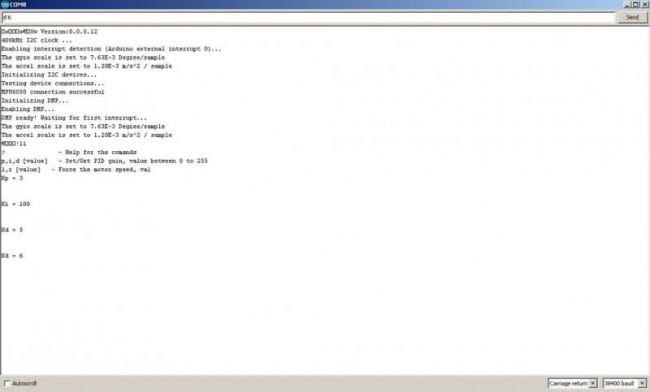
Начать тестирование Сегвея автор решил с загрузки кода на микроконтроллер и проверки его связи со схемами управления и датчиками.
Для проверки работоспособности кода, а так же возможного поиска проблем для их последующей отладки отлично походит Arduino Terminal . Важно правильно настроить усиление ПИД-регулятора, которое будет зависеть от параметров используемого двигателя.
После проведения настройки регулятора на контроллер подается питание, и датчики переходят в состояние ожидания. Затем нажимается кнопка старта, и включаются двигатели. Путем наклона Сегвея водитель управляет движением за счет работы алгоритма балансировки.
На видео ниже показана работа собранного устройства гироскутера:
Источник
Как изготовить своими руками сегвей
В этом видео уроке показано, как изготовить самодельный сигвей, как оказалось, его можно сделать своими руками. Это предварительная модель, которая делается без гироскопа и Ардуино, поэтому необходимо ее доработать, что автор и собирается сделать на одном из этапов. Еще очень интересная модель электросамоката тут.
Сегвей своими руками

Что нам понадобится? Для начала – колеса, возьмем от тренажера для пресса. Редуктор на 12 вольт и на 160 оборотов в минуту. Powerbank на 15000 миллиампер часов. Чтобы можно было управлять транспортным средством, то есть поворачивать направо или налево, ускоряться и замедляться, будем использовать модули, которые уже использовали при изготовления самодельной газонокосилки. Так можно будет регулировать обороты двигателя. Соответственно, 2 модуля, 2 двигателя, 2 повербанка.
Два комплекта работают по отдельности. Положим, добавляем оборотов правому двигателю, сигвей будет поворачивать налево. Тоже самое, но зеркально, при повороте направо. Если добавить оборотов одновременно двум моторам, средство будет ускоряться.
Сначала установим редукторы. Для этого прикладываем по центру на фанерном листе, обводим контур и фрезой делаем углубление. Точно так же, как был прикреплен редуктор с левой стороны, делаем с противоположной.
Нужно вырезать несколько таких брусков и прикрутить по бокам. Это нужно, чтобы фанера не провисала.
Снимаем колеса и ставим на ось. Как вы может видеть, они отличаются друг от друга. Нужно изготовить предварительно две деревянные втулки. Будем использовать самодельный токарный станок по дереву. Получились две деревянные заготовки.
Вставляем заготовку. Сверлим отверстие и приклеиваем заготовку эпоксидной смолой. (Автор в конце ролика сделал поправку, читайте ниже).
Теперь будем изготавливать руль. Для этого будем использовать кусок канализационной трубы. От тренажера мы взяли рукоять. В верхней части фанеры проделаем отверстия, закрепим трубу и рукоять. У сегвея руль должен быть слегка под уклоном, поэтому проделали в фанере отверстие под уклоном и подрезали пластиковую трубу.
Все модули управления будут установлены на руле. Нужно протянуть 8 кусков проводов от руля к редукторам. Чтобы сверху они не торчали, предварительно делаем сквозное отверстие в трубе и просовываем провода.
И теперь снова нужно все проклеить эпоксидной смолой и подождать 24 часа. Колеса как оказалось, деформировались, эпоксидка оказалась не очень надежным материалом. Разобрал редукторы, снял валы и на них нарезал резьбу. Также просверлил отверстия в деревянных втулках. Вставил металлические втулки и теперь это все выглядит намного надежнее. Колеса также можно будет вкручивать очень крепко. Пластиковая труба показалась не совсем надежной, внутрь нее вставлен для укрепления черенок от лопаты.
Ставим 2 модуля в панель. Нужно просверлить дырки в трубе под резисторы. Остается приклеить кнопки с помощью термоклея. Провести провода к модулю, редукторам, Power банкам. Прикрутить колеса.

Для тех, кто опасается неправильно подключить провода, на модулях все детально расписано.
Сигвей будет также иметь спидометр для велосипеда. Тестовый вариант самодельного сигвея готов. Давайте его протестируем.
Источник
Как сделать сегвей своими руками
Неужели такое сложное устройство, как сигвей, можно сделать самому? Оказывается, можно. Если приложить достаточно усердия и воспользоваться специальными знаниями. Что и сделал молодой инженер по имени Petter Forsberg, окончивший шведский технологический университет Чалмерса по специальности «Автоматизация и мехатроника».
Кроме знаний и умений, ему еще должны были понадобится немалые деньги, скажете вы. Да, деньги понадобились, но не много, около 300 евро, чтобы приобрести определенный набор деталей и оборудования. Результат его стараний — на этом видео:
Оборудование (200 €)*
- 2 двигателя, 2 колеса и 2 свинцово-кислотных батареи 150 €
- Стальная труба 5 €
- Алюминиевые блоки 10 €
- Алюминиевая опорная плита 10 €
- 12 мм стальная ось 5 €
- Руль 7 €
- Аварийный тормоз 3 €
- 2 Springs 8 €
* Цены указаны приблизительно
Электроника (100 €)*
- 3 х ATmega168
- ADXRS614
- ADXL203
- 8 Mosfets
- Gate drivers
- Конденсаторы и резисторы
- Двухслойная печатная плата
- Регулятор напряжения
- Индикатор LED
- LiPo батарея
Механика
Двигатели, колеса, цепи, шестерни и аккумуляторы были взяты от двух недорогих китайских электроскутеров. Двигатели позволяют обеспечить 24Вольт, 300Вт, 2750 оборотов в минуту.
Передача осуществляется от малой шестерни на моторе к большой шестерне на руле. Соотношение составляет примерно 6:1, такое высокое соотношение предпочтительнее, чтобы получить лучший крутящий момент и пониженную максимальную скорость. Передача на 12-дюймовом колесе была основана на механизме свободного хода, поэтому пришлось внести необходимые изменения, чтобы можно было водить колесо в обоих направлениях.
Основа платформы — неподвижная ось, на которой должны вращаться оба колеса. Ось крепится тремя алюминиевыми блоками, которые фиксируются с помощью 5мм установочных винтов.
Чтобы иметь возможность поворачивать при управлении сегвеем с помощью наклона рулевой колонки влево и вправо был выполнен чертеж необходимой детали в программе SolidWorks, после чего она была изготовлена на станке с ЧПУ. Программа для станка была написана с применением CAMBAM. Этот же метод был использован для производства коробки для электроники и сборки блока экстренного торможения.
Руль будущего сегвея представляет из себя обычный велосипедный руль, трубка которого присоединена к 25 мм стальной полой трубе. Чтобы сохранять положение рулевой колонки по центру и создать некоторое усилие для обратной связи были задействованы две стальные пружины. На руле также предусмотрена аварийная кнопка, которая подключена к стандартному реле от автомобиля и может снизить мощность двигателя.
Для питания используются два свинцовых аккумулятора 12V 12Ah, которые применяются для моторов на 24V.
Электроника
Все печатные платы были изготовлены специально для этой разработки. Главная плата берет на себя вычисления, собирает данные от датчиков, таких как гироскоп (ADXRS614), акселерометр (ADXL203) и подстроечный потенциометр, на основании чего способна определить в каком направлении вы хотите повернуть.
Основной процессор AVR ATmega168. Соединение с ноутбуком производится по Bluetooth с использованием RN-41. Два H-моста преобразуют сигналы управления от основной платы на усилие для двигателей. Каждый H-мост имеет ATmega168, связь между платами осуществляется через UART. Вся электроника работает на отдельной батарее (LiPo 7.4V 900mAh).
Чтобы иметь простой доступ к зарядке аккумуляторов, для программирования основной платы, изменения параметров контура управления была сделана небольшая коробка с необходимыми разъемами, переключателем питания электроники и подстроечного потенциометра на верхней стороне.
Программное обеспечение
Программное обеспечение микроконтроллера в основном состоит из фильтра для гироскопа и акселерометра и цикла PD управления. Для теста были взяты два фильтра: Kalman и Complemenatry. Оказалось, что производительность их была очень похожа, но для Complemenatry фильтра требуется меньше вычислений, поэтому именно он был выбран для использования. Также были написаны приложения на Java, чтобы можно было видеть все значения датчиков и сигналов управления, состояния батареи и т.д.
Техническая сторона создания сегвея своими руками на этом видео:
Источник



