
- Делаем из бензинового авто — электромобиль
- Самодельный электромобиль — всё не так, как думаешь
- Основные узлы
- Контроллер для блока управления
- Особенности схемы
- PWM — что это такое и с чем её едят
- Подводные камни в алгоритме работы
- Соединяем контроллер с транзистором правильно
- Несколько интересных моментов
- В конце концов получилось то, что на видео
Делаем из бензинового авто — электромобиль


Шаг первый: автомобиль
Первое, что вам нужно сделать, это правильно выбрать автомобиль. Они не все одинаково подходят для переделки в электромобиль. Нужно что-то легкое и энергоэкономичное.
Более тяжелые автомобили нуждаются в большем количестве энергии при движении, и таким образом, батареи быстрее разряжаются. Не нужны так же гидро или электроусилитель руля и тормозов, электростеклоподъемники и электрозамки. В общем нужно как можно меньше электропотребляющих приборов.
В итоге мастер приобрел Geo Metro за 500 долларов. Двигатель работал нормально, и кузов был в нормальном состоянии. Не работало сцепление, но в электромобиле оно и не нужно, впрочем, как и штатный двигатель.

Шаг второй: демонтаж
Нужно удалит все, что связано с системой внутреннего сгорания бензина. Демонтировать: бензобак, выхлопную систему, глушитель, катушку, стартер, радиатор, топливопроводы и т.д. Удаление всех лишних деталей уменьшит вес и упростит последующий монтаж оборудования. Подушки безопасности и другие элементы пассивной и активной защиты мастер не трогал.
Если все аккуратно демонтировать, то можно продать запчасти покрыть расходы. Мастер купил машину за 500 долларов, но затем продал двигатель, бензобак и радиатор за 550 долларов.


Шаг третий: переходная пластина
Двигатель демонтирован, но штатная коробка будет использована в дальнейшем. Вопрос в том, как прикрепить мотор к коробке передач? Мастер нашел выход и изготовил переходную пластину из куска алюминиевого листа. Мастер извлек коробку передач из машины и затем обрисовал ее карандашом и отметил все отверстия. Затем разрезал алюминиевую пластину до нужного размера и формы. Центр приводного вала двигателя и центр приводного вала трансмиссии должны идеально совмещаться.
Перед тем, как прикрутить двигатель и трансмиссию вместе с переходной пластиной, необходимо сделать муфту, которая будет соединять оба вала.








Шаг шестой: батареи
Этот автомобиль использует 6 батарей по 12В. Это настоящие гелиевые батареи Deka Dominator. Они не требуют обслуживания. Мастер смог купить использованные батареи по 12 долларов за штуку.
Недостатком этих батарей является то, что они требовательны к зарядке. Мастер приобрел зарядное устройство на 72 В, предназначенное для этих батарей, за 200 долларов.
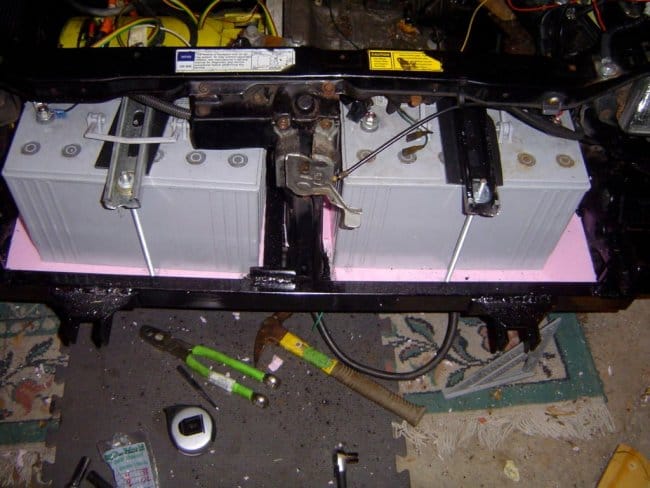
Четыре батареи находятся в багажнике автомобиля, а две — спереди, где раньше был радиатор.
Для задних аккумуляторов мастер разрезал две части каркаса кровати, чтобы они лежали на запасном колесе, и закрепил рамку болтами к раме автомобиля.
Для установки передних батарей был демонтирован бампер. Затем сварен каркас и закреплен на месте радиатора. Теперь нужно установить батареи и поставить бампер на место.
В магазине мастер купил «вход питания зарядного устройства». Это электрический разъем с резиновой крышкой. Так как бензобак уже был снят, он разъем на место горловины бензобака.
Заряжаются батареи в течении ночи.



В дальнейшем мастер менял конфигурацию батарей. Максимальное количество аккумуляторов 12 штук что дало мастеру 144 В. На этих батареях он смог разогнаться до 117 км/ч.
Так же он работает над подогревателем для батарей в зимнее время.
Шаг седьмой: контроллер
Контроллер является важной частью электромобиля. Контроллер представляет собой электронный блок, который регулирует работу электродвигателя.
Мастер использует пиковый ШИМ-контроллер Curtis на 400 А, разработанный для использования с последовательно включенными двигателями. Он может работать в диапазоне от 48 до 72В.
Чем больше сила тока, тем лучше будет ускорение (тяга). Чем выше напряжение, тем лучше максимальная скорость и экономичность автомобиля.
Контроллер на 72 В, оказался, хорошим компромиссом стоимости и эффективности. Мастер купил его на E-Bay за 300 долларов.
Для подключения следуйте схемам, имеющимся у производителя контроллера, для подключения батарей к контроллеру и двигателю используйте толстые кабели, такие, как сварочный кабель.
В качестве дросселя мастер использует потенциометр 5 кОм. Потенциометр устанавливается в связке со штатной педалью газа.

Шаг восьмой: итоги
Этот автомобиль может проехать 32 км на зарядке, и имеет максимальную скорость 75 км/ч. Этого вполне достаточно для поездки на работу и обратно. При необходимости можно добавить батареи.
Этот проект обошелся мастеру примерно в 1200 долларов, включая покупку машины. Если бы мастер все делал сам, то потратил бы всего 800 долларов на все. Этот автомобиль заряжается в частном доме мастера через программу возобновляемой энергии. Все электричество поступает из ветра, биогаза и других возобновляемых источников энергии.



Обогреватель.
Так как у этого автомобиля больше нет оригинального двигателя, у него также не работает отопитель. При необходимости можно установить керамический нагреватель.
Тормоза.
Одна из причин, по которой мастер выбрал этот автомобиль, заключалась в том, что в нем есть ручные стеклоподъемники, ручные замки, механическая коробка передач, рулевое управление без механического привода. Единственной проблемой были тормоза. Штатные тормоза имеют вакуумный усилитель. С демонтажем двигателя, тормоза не работают как нужно. Для начала мастер поиграл с аквариумным воздушным насосом, просто чтобы узнать, как работает вакуумная тормозная система. После этого я начал искать 12-вольтовый воздушный насос, чтобы его можно было использовать в качестве вакуумного насоса. В итоге был установлен 12 В насос и ресивер из алюминиевого баллона. Как только давление в баллоне падает, начинает работать насос.
Теперь у автомобиля есть силовые тормоза, как это было изначально, только он приводится в движение крошечным электродвигателем в маленьком насосе, а не бензиновым двигателем.

Источник
Самодельный электромобиль — всё не так, как думаешь
Всем привет. Учась в университете я собрал маленький электромобильчик, ну или карт. Его фишкой было то, что всё управление электроприводом, включая тормоза было отдано самодельному контроллеру. И именно о том, как я делал этот маленький автомобильчик, и с какими подводными камнями столкнулся при постройке — хотелось бы рассказать в данном материале. Материал не претендует на уникальность, но для меня это был большой и интересный опыт.

Тема рассказа стоит на стыке аппаратного и программного аспектов. И в прошивке для контроллера я имел дело не с какими-то абстрактными понятиями или данными, а со вполне реальными «физическими» устройствами: реле, электродвигателем, транзисторами итп. Так что приведу кратенькую характеристику технической части, тот состав который был на момент всех танцев с бубном.
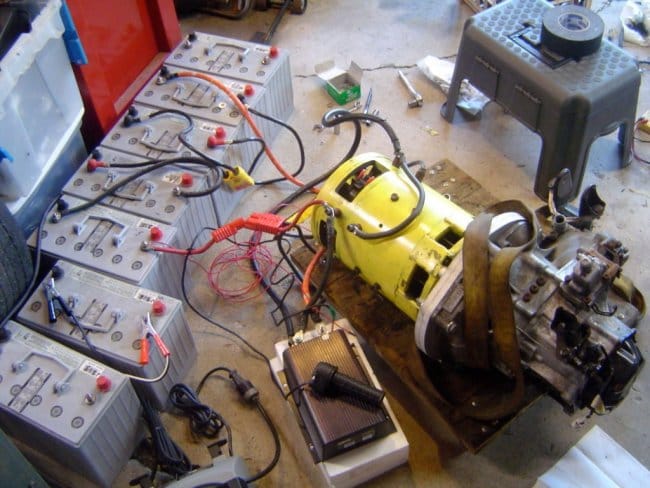
Основные узлы
Тяговый двигатель — коллекторный универсальный. Может работать как от постоянного, так и от переменного тока. Рабочее напряжение 220 вольт.

Аккумуляторная батарея — 25 свинцово-кислотных ячеек по 6 вольт фирмы Casil, соединённых последовательно, по итогу получаем батарею 150-160 вольт. Она установлена сзади и перемотана синей изолентой, всё как положено 🙂

Двигатель приводил колёса в движение через червячный редуктор с передаточным числом i=10. На фото видно, что двигатель сочленен с редуктором с помощью небольшого валика, он был выточен специально.

Системы торможения, то есть тормозного диска с суппортом не было в принципе. Поставить физический тормоз на тот момент не получалось. Поэтому торможение двигателем оставалось единственным реальным вариантом, так что управление торможением машины тоже пришлось брать на себя контроллеру.
Контроллер для блока управления
В принципе простой контроллер для электромобиля можно собрать и на «рассыпухе». Но хотелось бы, чтоб была возможность всё красиво настраивать с помощью программы, 21 век всё-таки. Путём долгих высоконаучных рассуждений за ужином я решил, что за основу контроллера стоит взять чип фирмы Microchip — pic16f877a, вот его краткие характеристики:

На тот момент я не очень шарил в электронике, и изначально хотел делать схему до безобразия тупой — двигатель включён или двигатель отключен, но вместо реле поставить транзисторный ключ, дабы ничего не щёлкало и не горело. Но решил, что риск оправдан, я ничего не терял да и просто хотелось сделать что-то стоящее. Так что остановился на связке микроконтроллер + силовой полевой транзистор в качестве ключа. Ручку газа и кнопку реверса вывел на руль.
Особенности схемы
При выборе транзистора я не скупился и выбрал IRFP4227PBF — N-канальный полевой транзистор (открывается положительным импульсом) на напряжение 200 вольт и максимальный ток 130 ампер. Корпус TO-247AC. Но, забегая вперед скажу — я смог сжечь и его.

PWM — что это такое и с чем её едят
Раз я использовал микроконтроллер в связке с полевым транзистором, то грех было не попробовать использование pwm/шим в схеме. Что такое шим? Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью методом пульсирующего включения и выключения прибора. — спасибо Википедии.
Достоинство такого способа управления транзистором: он во время работы находится в двух состояниях — либо полностью закрыт, тока нет и ничего не греется, либо он полностью открыт и сопротивление его составляет несколько милиом, соответственно в тепло на самом транзисторе рассеиваются какие-то доли ватта тепла, ну или единицы ватт, схема едва тёплая при таком режиме работы. И такой процесс — отрыть/закрыть происходит тысячи раз в секунду. Это называется частотой шим. Так же есть такая вещь, которая называется «скважность». Переводя на человеческий язык — эта цифра показывает какую долю времени открыт транзистор. Если чуть углубиться — допустим у нас частота ШИМ-синала 1000 герц. Значит транзистор открывается и закрывается 1000 раз за секунду, и процесс переключения между включено и выключено 1/1000 доля секунды. Величина 1/1000 — это период частоты. А с помощью скважности мы показываем какую часть времени от периода транзистор открыт и через него течет ток. Для примера: в программе скважность 255 — это максимальная мощность, 127 — 50%, 0 — транзистор закрыт.
Для генерации такой частоты применялся встроенный в чип «физический» контроллер, хотя есть возможность программной реализации, но в этом случае контроллер только и будет делать, что генерировать на выводе частоту с заданным периодом и скважностью. А с использованием контрллера из переферии МК можно было и генерировать сигнал, и чтоб программа делала что-то ещё.
Чем дальше в лес, тем злее волки — от частоты ШИМ зависит и то, насколько будет эффективно работать электропривод. Я пробовал разные частоты, от 2 до 15 килогерц, каждый раз это менялось программно. Честно говоря особой разницы не успел заметить, но уверен что она есть. К сожалению данных по этому вопросу не удалось получить в достаточном количестве. Единственное, что заметил — с разной частотой пищала машина во время работы. Кстати, если кто-то замечал в метро, электробусах и поездах, что во время старта слышно гул, писк, завывание — это как-раз таки пищат обмотки двигателя из-за работы на частотах контроллера. Очень это заметно на поезде «Ласточка», который по МЦК ходит, во время старта.
Подводные камни в алгоритме работы
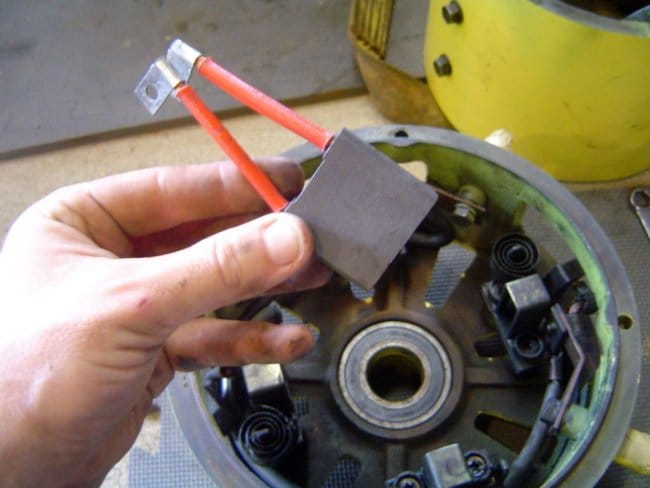
Следующая проблема была с реверсом двигателя. Двигатель коллекторный, у него две обмотки — неподвижная — статор, на корпусе, и вращающаяся — ротор. Для изменения направления вращения необходимо развернуть направление тока в одной из обмоток, не меня направления в другой. Для этого использовались два реле, срабатывали они одновременно, «перекидывая» схему на реверс при подаче на них питания. Но в первом варианте прошивки была ошибка — реле переключились под нагрузкой. Как итог теста под нагрузкой — два сгоревших реле, так как двигатель — индуктивная нагрузка и на контактах реле была нехилая такая дуга, контакты просто расплавились и сгорели во время переключения.
Выход из ситуации — вводим в программу условие, что перед переключением снимаем нагрузку выкручивая скважность PWM-сигнала на 0, перекидываем реле, и опять включаем мощность на заданный уровень. Именно так и работали тормоза на машине — реверсом. Только хардкор — никаких датчиков и энкодеров, ничего. А вот и фото релюшки, это вроде как реле стартера от жигулей. Если переключать их не под нагрузкой, то вполне работают и с высокими напряжениями, 160 вольт при 15 амперах держали, но допускаю, что контакты грелись ввиду малого сечения.


После я допилил прошивку и мощность поднималась плавно до заданного уровня. А это уже исключает удары в трансмиссии и нагрузку на узлы. Вот так одна строчка в программе может увеличить срок службы агрегата.
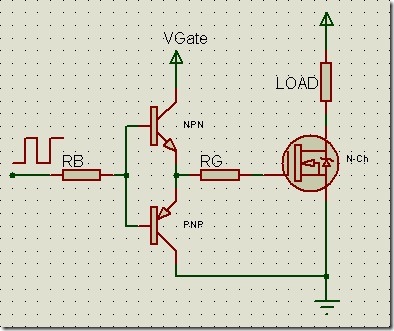
Соединяем контроллер с транзистором правильно
Оставалось только правильно сочленить транзистор с контроллером. Сделал я это несколько не правильно, через оптическую пару, напрямую. Но эта схема прокатывает при работе с низкими напряжениями, при высоких рабочих напряжениях постоянно сгорал затвор транзистора, да и для управления нужен двухтактный драйвер. Нормальная схема приведена ниже. Но тем не менее на один раз схемы с оптической парой хватило, каким-то чудом на тест драйве она работала, а выгорать начала сразу после него. Вот схема «правильного» драйвера, только в моём варианте ещё была развязка оптикой от контроллера. Картинка взята с Drive2:
Несколько интересных моментов
В конце концов получилось то, что на видео
Вообще мои опыты с электроприводом начались ещё в школе и я испробовал много разных конструкций, но это самая удачная схема на тот момент. Если материал понравится, то напишу отдельный пост про всю эпопею.
UPD: Изменил ошибки в статье, спасибо всем, кто откликнулся
Источник



