
- Как самостоятельно изготовить и использовать ручной грейфер
- Грейфер ручной
- Как изготовить своими руками?
- Материалы
- Пошаговая инструкция
- Особенности эксплуатации
- Дешевый и полнофункциональный робот-манипулятор своими руками
- Конкурентные решения на рынке
- Что же нам нужно купить?
- Сборка
- Делаем 3D модель
- А что с реальной рукой?
- Как подвигать наш манипулятор?
- Изготовление самодельного грейфера
- Процесс изготовления своими руками
- Необходимый материал
- Пошаговая инструкция
- Правила эксплуатации
- Видео по теме: Как своими руками сделать грейфер
Как самостоятельно изготовить и использовать ручной грейфер

Практически все инструменты и приспособления для работы необходимо покупать в магазине. Порой можно сделать их вручную, однако не всегда это окажется целесообразно. А вот есть случаи, когда практически нет другого выбора, кроме как изготовить инструмент вручную. В данном случае речь пойдет о ручном грейфере, который легко изготовить и трудно найти ему альтернативу из продающихся инструментов.
Грейфер ручной
Ручной грейфер выглядит и работает так же, как и стандартный, что устанавливается на тяжелых кранах. Отличие только в размере и весе. Он состоит из двух ковшей, которые по центру соединены вертикально двумя рычагами, соединенными продолговатым шарниром. Шарнирная опора, а также противоположные края грейфера подвешиваются на цепи.
Как можно догадаться, малого веса такого грейфера никак не хватит, чтобы копать замелю, а с песком работать нет никакого смысла. Зачем же он тогда нужен? Он используется для чистки колодцев от ила.
Как изготовить своими руками?
Ручной грейфер очень легко изготавливается своими руками. Для этого необходимо минимум времени, деталей и умений, а самое главное, что при определенных условиях денежных затрат вообще может и не быть.
Материалы
Необходима сталь толщиной в 2 мм. Две трубы разного диаметра: одна должна свободно входить и проворачиваться в другой. Также необходимо достать цепь, длина которой должна быть таковой, чтоб сложенной в 3 раза цепи хватило на весь колодец с запасом, примерно метра на 2.
Из инструментов достаточно будет только сварочного аппарата и резака. Больше ничего не понадобится.
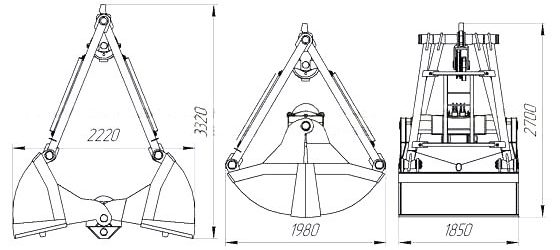
Чертеж грейфера для чистки колодца 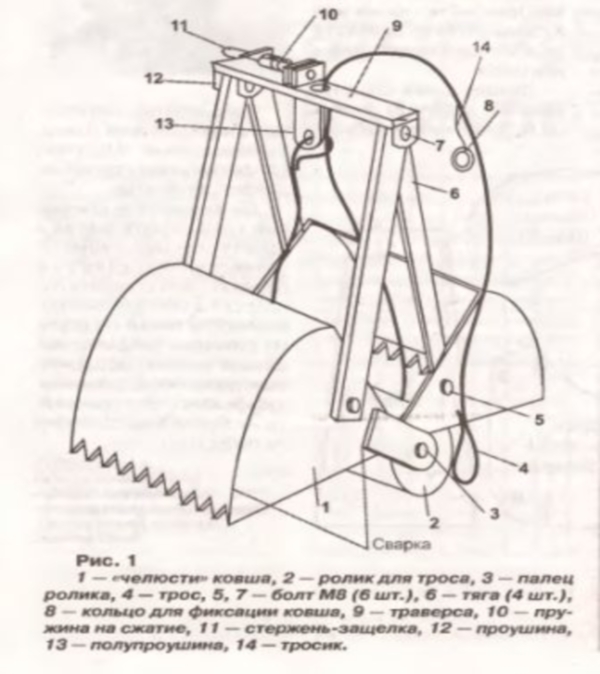
Пошаговая инструкция
Чтобы сделать ручной грейфер для чистки колодца, необходимо следовать инструкции:
- Первым делом необходимо взять стальной лист и вырезать пластину длиной в 550 мм и шириной 22 мм. Далее эту пластину необходимо разделить на две части, однако разрезать их не прямой линией, а зигзагом. В результате должны получиться зубцы. Будет достаточно длины каждого зуба 15 мм.
- Теперь необходимо сделать борта. Однако, при их вырезании следует учитывать то, что пластины для дна не должны располагаться горизонтально. Между ними и землей должен быть угол примерно в 15 градусов. Для бортов в самом высоком месте (центр грейфера) хватит и 80 мм.
- Вырезаем пластины шириной 40 мм и высотой 220 мм. Отступаем от края передней части борта 5 см и навариваем пластины так, чтобы две на одной стороне сошлись в центре своего края.
Особенности эксплуатации
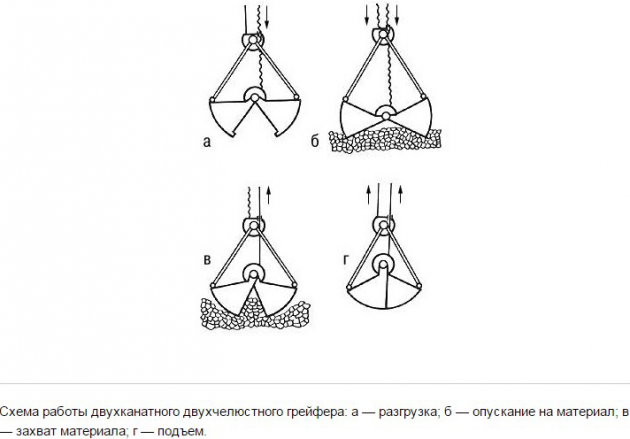
Работать с таким грейфером очень просто. Центральная цепь наматывается на барабан подъемного механизма. Остальные управляются вручную. Далее просто опускаем грейфер в колодец, но непосредственно перед водой спуск необходимо продолжить на боковых цепях. Это надо для того, чтобы грейфер раскрылся. После того как он полностью опустился на дно, поднимается вверх за центральную цепь. Далее просто вытаскивается и чистится от ила.
После работы грейфер лучше всего просушить и хранить в сухом месте, так как голая сталь может сильно пострадать из-за коррозии.
На видео процесс чистки колодца ручным грейфером:
Источник
Дешевый и полнофункциональный робот-манипулятор своими руками
Сразу оговоримся, что совсем дешево делать не будем, т.к. не хочется убивать нервные клетки, делая доморощенные энкодеры для моторчиков + хочется упростить создание 3D модели, которая нужна для управления через ROS (ссылка на готовую модель – ниже в статье).
На момент написания статьи ориентировочная конечная стоимость изделия составляет
70 000 руб. Если у вас есть 3D принтер, то можно смело вычесть из нее 20 000 руб. Если принтера нет, то его появление станет приятным бонусом. Все расходы я буду описывать исходя из того, что у нас нет ничего, кроме денег.
Как выглядит результат:

Также нужно отметить, что для программирования руки нам понадобится компьютер с установленными ОС Linux (я использую Ubuntu 18.04) и фреймворком ROS (я использую Melodic).
Может возникнуть вопрос «почему 70К рублей – это дешево?»
Отвечаю. Изначально я не хотел заморачиваться с созданием роборуки и думал просто купить что-нибудь простенькое, но достаточно функциональное в сборе.
Что являлось для меня критериями функциональности и минимальной допустимой простотой (т.е. почему НЕ подойдут манипуляторы с алиэкспресса) – можно обсудить в комментариях, чтобы не грузить тех, кому это очевидно и/или не интересно.
Конкурентные решения на рынке
Опишу, однако, кратко примеры того, что я рассматривал на рынке:
1) top3dshop.ru/robots/manipulators/dobot-magician-basic.html
176 000 руб. DOBOT можно купить не только в этом магазине, но обычно он стоит еще больше. Наверняка есть шанс найти его где-нибудь дешевле, но все равно это будет сильно дороже, чем 70 000 руб.
2) robotbaza.ru/product/robot-manipulyator-widowx-robotic-arm-mark-ii
280 000 руб. Еще дороже. Вообще, манипуляторы от TossenRobotics прямо у производителя стоят супервменяемых денег. Вот только доставку в Россию (а я-то именно тут) из их магазина не заказать.
Забегая немного вперед скажу, что делать мы будем копию робо-руки PhantomX Pincher Robot Arm Kit Mark II, которая производится именно компанией TossenRobotics.
Итого, видим, что 70 000 руб – это совсем не так дорого.
Что же нам нужно купить?
Все цены привожу на момент написания статьи (июль 2020 года):
1) 6 моторчиков DYNAMIXEL AX-12A

Я покупал по цене 7200 руб за 1 штуку, но, кажется, можно найти и за 6000 при большом желании. Будем считать, что вам не повезет и вы тоже купите за 7200.
Суммарная стоимость: 43 200 руб
Подойдет любой простенький, можно уложиться в 20 000 руб.
3) Arduino Uno + Power Shield

4) Опционально (но я очень рекомендую): Лабораторный источник питания

Сборка
Отлично! Мы закупили все, что нам нужно (вероятно, дольше всего ждали доставки моторчиков, мне их везли больше месяца).
1) Напечатаем детали для манипулятора на 3D принтере.
Качаем STL файлы отсюда
2) Собираем воедино с моторчиками. Проблем со сборкой быть не должно, но если они вдруг появятся, можно воспользоваться вот этой инструкцией
Делаем 3D модель
Класс! Рука у нас есть, но ведь ей же нужно как-то управлять. Хочется максимально использовать достижения человечества, поэтому установим себе ROS.
Для того, чтобы полноценно работать с манипулятором в ROS – нужно сделать его URDF модель. Она будет нам необходима для того, чтобы управлять робо-рукой с помощью пакета MoveIT!
На момент написания статьи последняя стабильная сборка доступна для Melodic/Ubuntu 18.04, чем и объясняется мой выбор версии системы и фреймворка в начале статьи.
Построение URDF модели – довольно трудоемкая (и, на мой взгляд, самая скучная) часть данного проекта. Нужно немного допилить напильником stl модели компонентов и соединить их воедино в XML-образном файле, вручную подбирая правильные коэффициенты смещения деталей друг относительно друга.
Кто хочет – может проделать работу самостоятельно, всем остальным поберегу нервы и просто дам ссылку на свой готовый файл:
В данной модели пока нет захватывающего устройства, однако, до того момента, чтобы захватывать предметы в реальном мире нам еще далеко. Для остальных задач этой модели более чем достаточно.
Выглядит модель вот так:
Из полученного URDF файла мы сделаем конфиг MoveIT!, который позволит нам моделировать движения манипулятора и отправлять управляющие команды на реальную робо-руку.
Для создания конфига есть отличный туториал (ссылка)
Тут я могу опять сэкономить время и предоставить свой конфиг. Лежит он вот тут:
Можно скачать конфиг с гитхаба и запустить следующей командой:
Примерно так можно будет управлять нашей реальной робо-рукой через rviz, когда мы подключим ее к ROS:
А что с реальной рукой?
Переместимся из мира 3D моделей в суровую реальность. У нас есть собранный ранее манипулятор. Хотелось бы его как-то подвигать. Сделаем это с помощью Arduino UNO и Power Shield.
Подключим первый моторчик манипулятора (который снизу) к Power Shield’у и блоку питания следующим образом:
Да, data pin моторчика мы соединим сразу с 3 и 4 выводом Arduino. Пытливый читатель мануала Dynamixel (вот он) сразу заметит, что связь с внешним миром у моторчика организована по Half Duplex Asynchronous Serial Communication, а это означает, что data pin используется сразу и для получения команд и для ответа.
По умолчанию, на аппаратном уровне Arduino умеет работать только с Full Duplex UART. Эту проблему можно обойти, используя Soft Serial библиотеку, что мы и сделаем. Именно использование Half Duplex режима объясняет подключение data pin мотора к 3 и 4 выводам шилда одновременно.
Помимо полудуплексного обмена работа с Dynamixel через Arduino имеет еще пару занимательных моментов, которые могут быть не совсем очевидны с самого начала. Сведем их все воедино.
Как подвигать наш манипулятор?
1) Сначала скачаем нужную библиотеку. Она называется ardyno и ее можно получить через Arduino Library Manager, либо тут (ссылка)
2) По умолчанию Dynamixel AX-12A хотят работать с baud rate = 1000000. Однако Software Serial Interface не потянет такую скорость, поэтому baud rate стоит снизить до 57600. Таким образом, начало файла с вашей программой будет выглядеть примерно вот так:
3) Все наши моторчики соединены друг с другом последовательно. Значит, чтобы обращаться к каждому из них — нужно знать его ID? Это действительно так, объект DynamixelMotor при инициализации получает два параметра: interface (одинаков для всех, его мы задали в предыдущем пункте) и id (должен быть у всех разный, иначе поведение будет у манипулятора весьма странное)
Id каждому моторчику придется задать вручную. Кажется, что будучи соединенными последовательно, они могли бы и сами рассчитаться по номерам от 1 до 6, но этого не предусмотрено. Поэтому нужно каждый моторчик отдельно подключить к Arduino (отключив от остальных) и выполнить следующую программу:
Изначально все моторчики имеют именно поэтому мы и указываем вверху
NEW_ID для каждого моторчика нужно заменить на число от 1 до 6 (да, ок, первый моторчик можно не трогать). Нумеруем их в порядке от нижнего к верхнему.
Ура! у нас есть полноценный манипулятор, который мы можем двигать, а также имеется 3D модель к нему. Можно брать ROS и программировать любые крутые штуки. Но это уже рассказ для отдельной статьи (и не одной). Данное же повествование подошло к концу, спасибо за внимание!
Источник
Изготовление самодельного грейфера
Самодельный грейфер — устройство, конструктивно схожее с большим механизированным грейфером. Отличается от последнего только малыми размерами и отсутствием машинного привода.
Назначение ручного грейфера — очистка колодцев от залежей ила и донного мусора. Для копания почвы он непригоден из-за малого усилия на смыкающихся ковшах.
Процесс изготовления своими руками
Можно сделать грейфер своими руками, сэкономив на приобретении либо аренде дорогого оборудования. По эффективности самодельный грейфер для чистки колодцев ничем не будет отличаться от механизированного, т. к. ил — мягкая субстанция, находящаяся к тому же в полужидком состоянии.
Необходимый материал
Чтобы сделать устройство, потребуются:
- стальной лист толщиной 2 мм (подойдет любая, например, распространенная СТ3);
- две трубы из стали длиной около 60 мм, одна из которых свободно входит в другую, но не болтается;
- цепь либо стальной трос длиной втрое больше, чем глубина колодца, плюс 1,5–2 м на запас;
- сварочный аппарат, электроды и маска сварщика;
- дополнительно — дрель, болгарка по металлу, крепежные болты (можно обойтись без них).









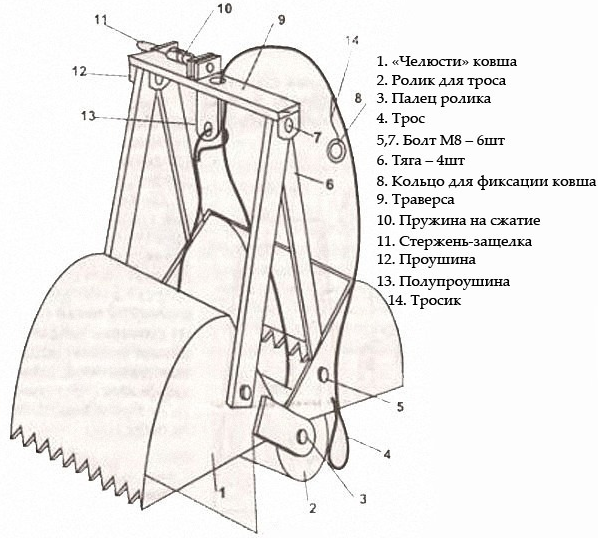
Конструктивно любой самодельный грейфер состоит из двух зубчатых ковшей, в сомкнутом состоянии образующих полуокружность при взгляде спереди. Они соединены между собой кронштейнами, приваренными к барабану из вставленных одна в другую труб — первый ковш ко внешней трубе, второй — к внутренней. Дополнительно на пластинах ковша наварен балласт, примерно по 5 кг на каждой стороне. Одна цепь намотана на барабан, другие цепи или тросы продеты в проушины на пластинах — они размыкают «челюсти».
Пошаговая инструкция
Процесс сбора конструкции:
- Для ручного грейфера объемом в 1 ведро достаточно стальной пластины длиной 550 и шириной 220 мм. Она разрезается на 2 равные части, при этом разрез либо сразу идет зигзагом, формируя зубья, либо полосы с зубьями привариваются впоследствии.
- На первом ковше зубья должны быть на торце пластины, на втором — приварены с внешней стороны, чтобы при смыкании они заходили внахлест, один на другой.
- Для бортов берутся трапециевидные пластины высотой 220. Они привариваются к основным пластинам, которые сформируют раздвижное днище, с отступом в 50 мм от линии зубчатого края борта. При этом к первой чаше боковые пластины привариваются встык, ко второй — с внешнего края борта, чтобы при смыкании они заходили одна за другую.
- Снизу или сбоку наваривают балласт.
- После этого из остатков металла вырезают кронштейны или «ушки», по 2 на каждую половину раздвижного ковша. Их приваривают к узкой части трапециевидных боковин.
- Изготавливают шарнир из двух металлических труб. Трубка меньшего диаметра должна немного выступать из большей.
- Продевают шарнир меж половинками «пасти». Чашу меньшего диаметра через посредство «ушек» приваривают к внешней трубе (так, чтобы не прихватить сваркой внутреннюю), чашу большего диаметра — к внутренней трубе.
- Проверяют. Конструкция должна свободно двигаться, зубчатые пластины — смыкаться, «челюсти» — слегка заходить одна за другую.
- К барабану приваривают или прикрепляют другим способом основную цепь. В обеих чашах проделывают отверстия на противоположной от зубьев стороне, в которые так же продевают цепи или тросы (можно приварить или прикрепить иначе).
- Грейферный ковш своими руками готов.
Правила эксплуатации
На боковых цепях ручной грейфер опускают в колодец до самого дна. При этом его «челюсти» раскрыты на максимум. Когда он достигает дна (это чувствуется по ослаблению натяжения цепей), его поднимают за центральную цепь или трос, при этом чаши автоматически смыкаются под собственной тяжестью, зачерпывая ил.
Чтобы вытащить конструкцию, требуется существенное усилие. После подъема ее опорожняют и снова опускают в колодец — до победного конца.
Видео по теме: Как своими руками сделать грейфер
Источник



