
Как сделать недорогой FPV микро-дрон







Для следующего шага нам следует приобрести электродвигатели в количестве 4 штук, для этого отлично подойдут движки Racerstar 8520 8.5x20mm, которые продаются в комплекте. Сами электродвигатели следует установить на раму в свои посадочные отверстия, которые следовало сделать ранее. В идеале, когда двигатели сидят плотно на своём месте, без каких либо дополнительных крепежей. Но если вы вырезали раму собственноручно, и сделать точные отверстия вам не удалось, то можно воспользоваться супер клеем или термоклеем, но делать это следует так, чтобы не нарушить развесовку.
Также при установке двигателей следует не забывать что в комплекте по два типа двигателей, одни, что вращаются по часовой стрелке, а другие что против часовой. Устанавливать такие двигатели следует друг напротив друга.





























Ну и в завершении сборки, следует закрепить аккумулятор на раме квадрокоптера. Это можно сделать также на двойной скотч или оригинально закрепить его при помощи резинки, так как сделала это автор.
Ну, вот и всё! Вы собрали свой микро-дрон. После сборки сразу следует перейти в его настройки. А именно подключаем аккумулятор к полётному контроллеру, а затем аппаратуру управления, если приёмник «законэкчен» с аппаратурой то сразу после её включения они должны найти друг друга, если нет, то в инструкции к вашей аппаратуре должно быть подробно описано, как это сделать.


Присоединив аппаратуру с приёмником, переходим к настройке. А именно следует слегка поднимать дрон, аккуратно добавляя газ. И если он отклоняется, в какую либо сторону, то следует поднять обороты конкретного двигателя, в сторону которого он летит, и делать это следует до тех пор, пока в замкнутом пространстве дрон не будет максимально стабилен и хоть как то, держать точку.
Далее FPV камера. Настоятельно рекомендую, если вы серьёзно настроены на то, что вы реально будете этим заниматься, и строите этот дрон для тренировок, а затем приобретёте или построите себе серьёзный аппарат, то сразу следует приобретать хороший FPV шлем чтобы не покупать его в дальнейшем. Если для вас это больше игрушка, то можете сэкономить и приобрести такой же FPV приёмник как у автора самоделки. Чтобы начать видеть трансляцию на своём смартфоне следует, включить дрон, затем скачать и открыть специально приложение на своем смартфоне (QR- код на загрузку приложения будет в инструкции), подключить FPV приёмник и все должно работать.







Ну, на этом все! В итоге у нас получилось, что-то между игрушкой и тренажёром для профессионалов. Но в любом случае самоделка очень интересная и понравиться каждому.
Вот видео автора самоделки:
Ну и всем спасибо за внимание и удачи в будущих проектах самодельщики!
Источник
Собираем самодельный FPV квадрокоптер
Здравствуйте, уважаемые читатели! В этой статье хочу поделиться материалом по сборке FPV квадрокоптера на базе рамы, рассчитанной на установку пятидюймовых пропеллеров – Realacc Kylin 210. Главная особенность данной рамы – беспроблемное крепление бюджетных экшн камер типа Xiaomi YI и ей подобных.
Эта статья рассказывает о том, как сделать квадрокоптер своими руками из готового набора рамы, а так же про установку электроники на дрон.
Поставляется комплект рамы Realacc Kylin 210 в обычном полиэтиленовом пакете, все элементы рамы просто ссыпаны в одну кучу.
Диагональ по центрам моторов – 210 мм. Что ясно из названия рамы – Realacc Kylin 210.

Форма основания – вытянутый крест, в длину рама на 8 мм больше чем в ширину.

Толщина основания – 5,3 мм. Рама очень жесткая на прогиб, это очень хорошо.

Ширина лучей – 13 мм, этого вполне достаточно для размещения отдельных регуляторов на каждый мотор.

Остальные карбоновые детали толщиной – 2 мм. Кроме верхней деки и проставки в креплении экшн камеры, они толщиной – 1.5 мм.
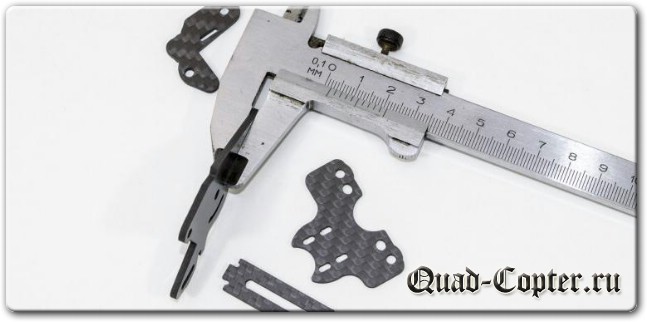
Распил ровный, без видимых косяков и задиров слоя.


На резе хорошо видна структура слоев китайского псевдокарбона. Обычно это два или три слоя углеткани, остальное текстолит. Так, и цена соответствует качеству материала.

Рама собирается за несколько минут. Сначала собираем верхушку рамы с креплением для курсовой и экшн камеры.


На основание рамы прикручиваем комплектные стойки.

Прикручиваем верхнюю часть рамы к стойкам. Рама готова.

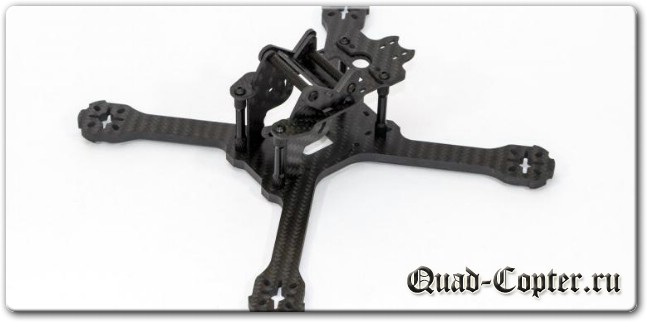
Вес пустой рамы – 94 г.

Для сборки квадрика, кроме вышеупомянутой рамы буду использовать: приемник – FrSky XSR для аппаратуры TARANIS; курсовую камеру (можно использовать любую на ваш выбор) – Foxeer HS1177 V2.
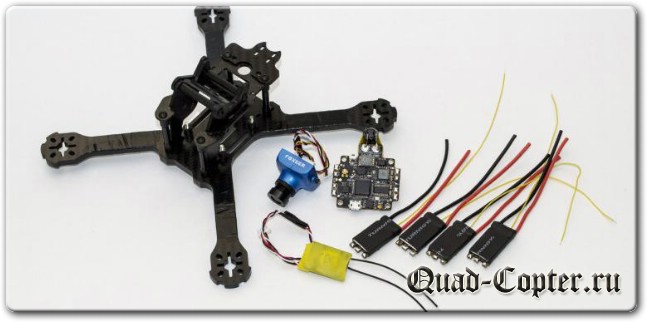
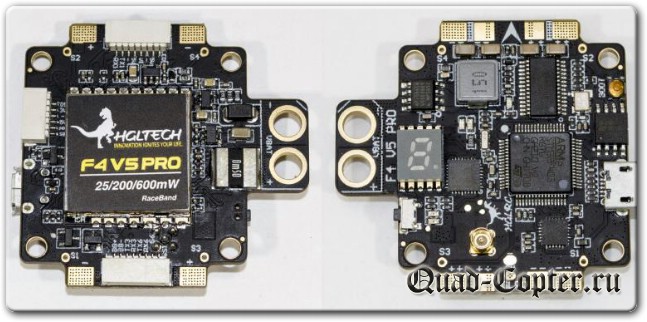
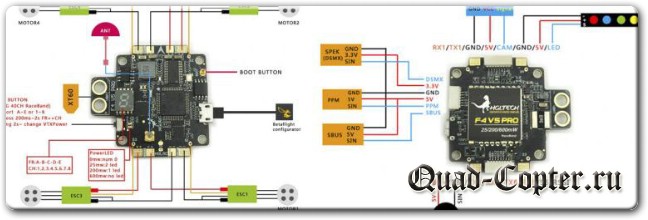
Полетник с интегрированной PDB и видеопередатчиком – HGLRC F4 V5PRO. На данный момент данный контроллер снят с производства и его прямой наследник – HGLRC F4 V6PRO. Крепление 30.5×30.5 мм.
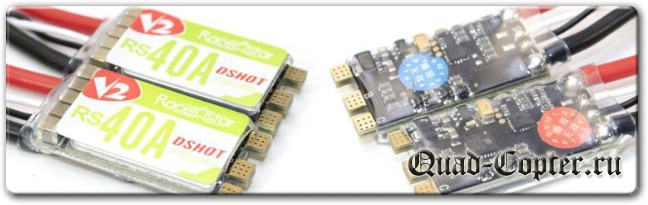
Четыре регулятора оборотов для бесколлекторных моторов с поддержкой протокола D-Shot 600 — Racerstar RS40A V2.

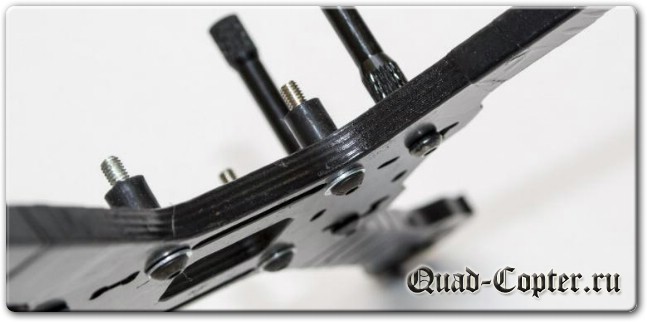
Приступим к сборке коптера. Полетный контроллер установлю на стойки с виброразвязкой – Flight Controller Anti-Vibration Fixed Screws.

Пришлось подложить шайбы, чтобы притянуть стойки к раме.

Перед сборкой все острые кромки рамы я скруглил надфилем, а торцы покрыл несколькими слоями акрилового лака (можно клеем на основе цианакрилата).
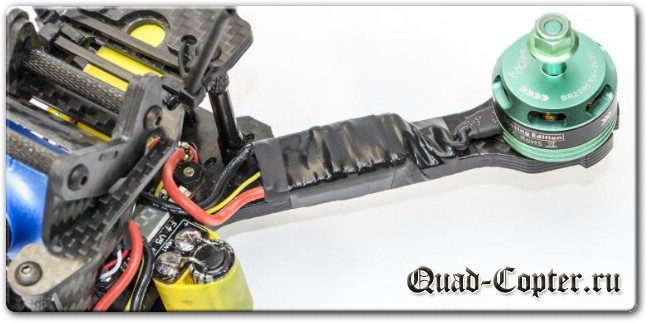
Изолирую лучи одним слоем изоленты, на случай, если он лопнет, и куски карбона могут замкнуть контакты регулятора.

К основанию рамы прикручиваем все четыре мотора. Я креплю мотор на все четыре болта, хотя можно и на два, если с фиксатором резьбы.
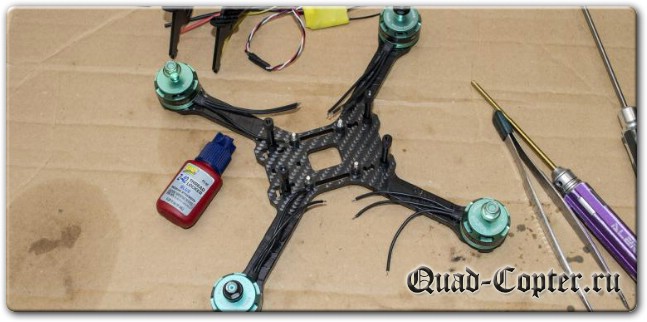


Чтобы в полете ничего само не открутилось – использую фиксатор резьбы.

Прикручиваем полетный контроллер к стойкам.
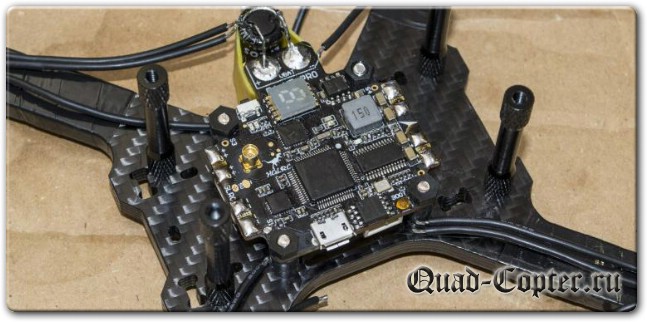
Закрепляем регуляторы на лучах парой оборотов изоленты, это необходимо для того, чтобы определить конечную длину проводов.
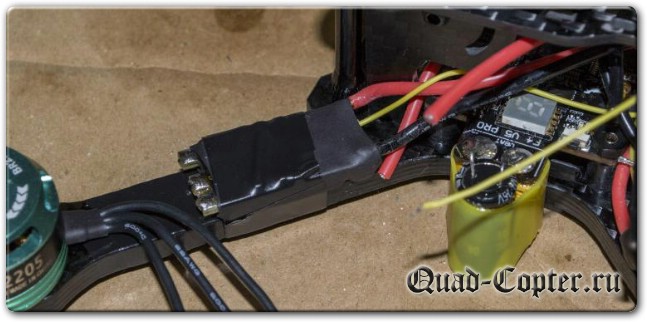

Согласно инструкции на полетный контроллер, паяем силовые и сигнальные провода от регуляторов на плату контроллера.

Паяем провода от моторов к регуляторам. К каким фазам, какой провод подключать значения особого не имеет и влияет только на направление вращения моторов. На этапе настройки можно поменять направление вращения моторов в программе blhelisuite.

Проверяем качество пайки, чтобы в полете ничего не отвалилось.

Рекомендую после пайки все соединения заизолировать специальным лаком, я использую несколько слоев plastik 71 и подсушиваю феном.

К полетнику подключаем все компоненты, включая антенну (без антенны сгорит видеопередатчик) и проверяем на работоспособность. Убедились, что все работает – можно окончательно заканчивать сборку и прикрутить верхнюю часть рамы к основанию. В процесс настройки полетного контроллера подробно вдаваться не буду, кому интересно можете подробно ознакомиться в этой статье – « Собираем и настраиваем квадрокоптер на базе комплекта – AuroraRC C2 Flytower OMVT F4 », в разделе настройка.
На верхней деке есть отверстие для установки SMA разъема, к которому будет прикручиваться антенна. Для полетов вокруг да около такая антенна не нужна, и будет место для приемника.


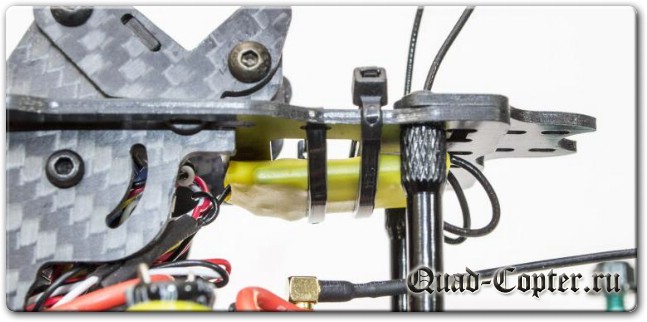
Установлю вот такой диполь (Original MMCX 5.8GHG 3dBi FPV Antenna) с разъемом MMCX как раз подходит к полетнику.
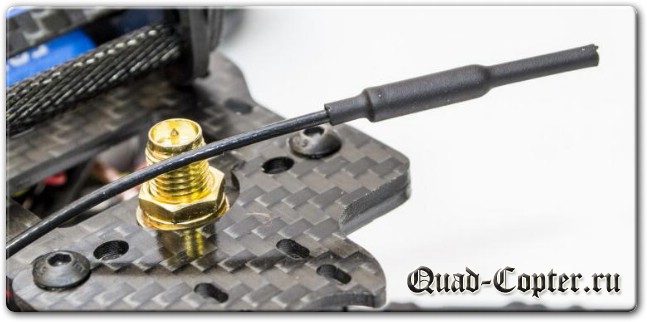
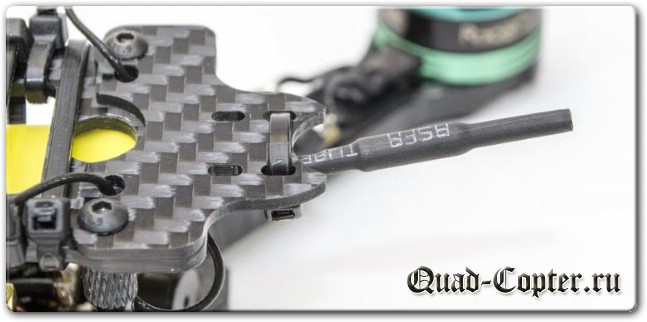
Окончание антенны дополнительно усилю вторым слоем термоусадки.

На освободившееся место стяжками закрепляем приемник.
Усы антенн выводим за пределы рамы и закрепляем на обрезанных стяжках с помощью термоусадки. Угол в 90 градусов между лучами антенн не выдержан, но оно и так нормально работает на удалении до 200 метров.


Фиксируем антенну видеопередатчика.
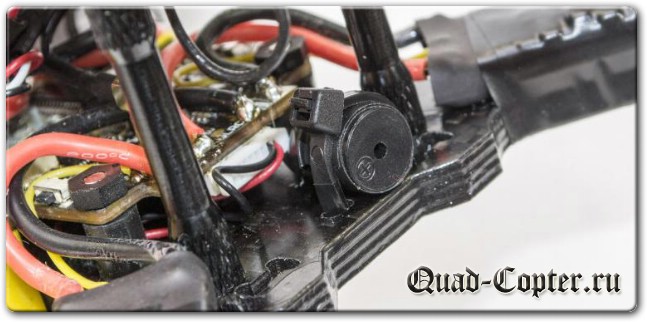
Про пищалку тоже не забыл, притянул стяжкой к основанию рамы.
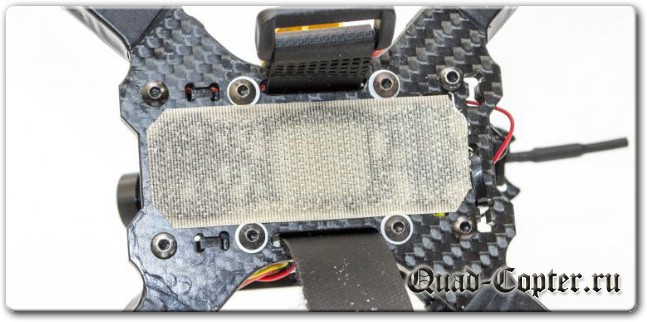
С помощью пинцета и какой-то матери, в пазы основания рамы продеваем стяжку-велкро для фиксации аккумуляторов. Для этой операции нужен пинцет с тонкими и изогнутыми губками, иначе намучаетесь.

Для более надежной фиксации акума на раме, использую липучку типа репейник (крючки на раме). Но можно установить прилагаемую к комплекту рамы прокладку из пенорезины. Как по мне – липучка надежней и не надо потом лазить на корячках по всему полю и искать куда отлетел акум при падении и ударе об землю.


Последний штрих – окончательно фиксируем регуляторы на лучах рамы, кто-то это делает стяжками, я обычно просто приматываю изолентой.
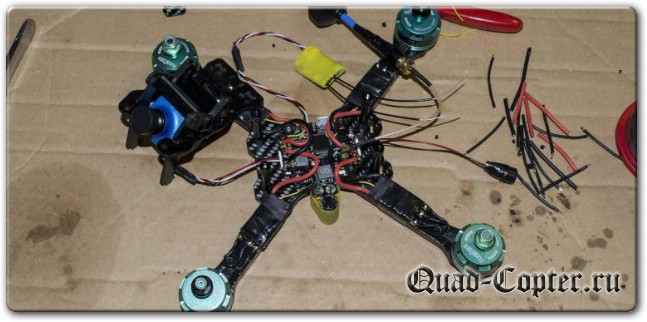
В итоге получилось:


Вес квадрика с пропами «трешками» – 332 г

Вес с акумом 4S 1300 mAh – 486 г.

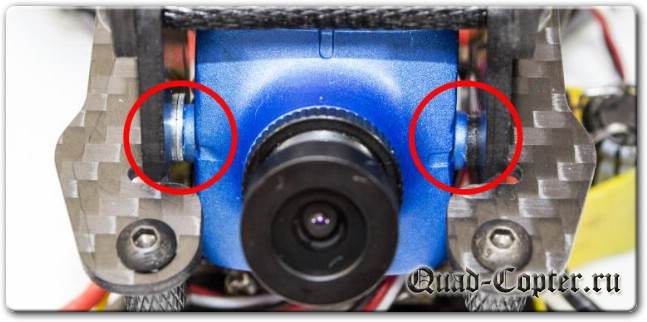
Немного хочу рассказать об особенностях рамы Realacc Kylin 210. Ширина проема для установки FPV камеры 27.8 мм, и рассчитана на крепление камер через силиконовые демпферы, у меня таковых нет, подложил попавшиеся под руку шайбы.
Боковые карбоновые пластины не дадут установить стек выше двух этажей при использовании длинных стоек. Если поколхозить со стойками, то думаю три этажа вкорячить все-таки можно.

Площадка для установки экшн камер имеет регулировку угла наклона.
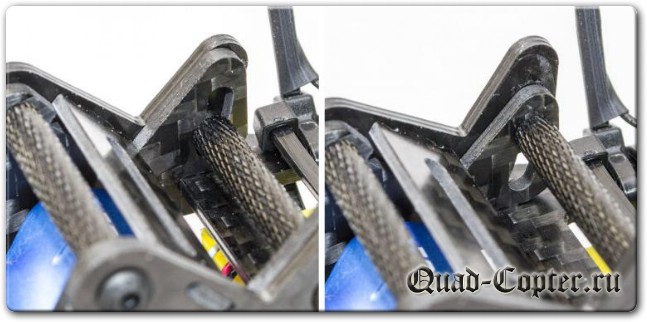
Камера закрепляется обычной велкро-стяжкой, держится вполне надежно и не отлетает даже при жесткой посадке в стиле – «морковка» с 5 метров.


Квадрик с таким конфигом летит вполне зачетно, даже несмотря на изначальный небольшой люфт в моторах (люфтили прямо из коробки).
Полеты самодельного квадрокоптера
Realacc Kylin 210 – неплохой вариант компактной рамы для самостоятельной сборки FPV коптера. Рама имеет хорошую жесткость при небольшом весе и вполне пригодна для хобийных полетов или тренировок.
В заключение приведу несколько вариантов рам с подобными креплениями для экшн камер.
 Realacc X210 214mm 3mm/4mm
Realacc X210 214mm 3mm/4mm
Купить: BangGood , AliExpress  Realacc X210 Pro 214mm
Realacc X210 Pro 214mm
Купить: BangGood , AliExpress  Realacc X210 V+ 214mm
Realacc X210 V+ 214mm
Купить: BangGood , AliExpress
Электроника и компоненты которые использовались в статье:
 Realacc X210 4mm Frame
Realacc X210 4mm Frame
Купить: BangGood , AliExpress  Realacc Kylin 210 210mm
Realacc Kylin 210 210mm
Купить: BangGood , AliExpress  FrSky XSR 2.4GHz 16CH
FrSky XSR 2.4GHz 16CH
Купить: BangGood , AliExpress  Foxeer HS1177 V2 600TVL
Foxeer HS1177 V2 600TVL
Купить: BangGood , AliExpress  HGLRC F4 V5PRO Flight
HGLRC F4 V5PRO Flight
Купить: BangGood , AliExpress  HGLRC F4 V6PRO Flight
HGLRC F4 V6PRO Flight
Купить: BangGood , AliExpress  4X Racerstar RS40A V2
4X Racerstar RS40A V2
Купить: BangGood , AliExpress  4X Racerstar Racing Edition
4X Racerstar Racing Edition
Купить: BangGood , AliExpress  Original MMCX 5.8GHG 3dBi
Original MMCX 5.8GHG 3dBi
Купить: BangGood , AliExpress
Источник



