
- Левитрон своими руками: самодельная схема устройства для левитации в магнитном поле
- Шаг 1: Схема устройства
- Шаг 2: Сборка
- Шаг 3: Спайка
- Шаг 4: Настройка
- Левитрон своими руками с датчиком холла
- Как самому собрать аналоговый левитрон
- 0.Предисловие
- 1.Краткое описание
- 2.Фунциональная схема
- 3.Конструкция
- 4.Принципиальная схема
- 5.Выбор компонентов
- 6.Заключение
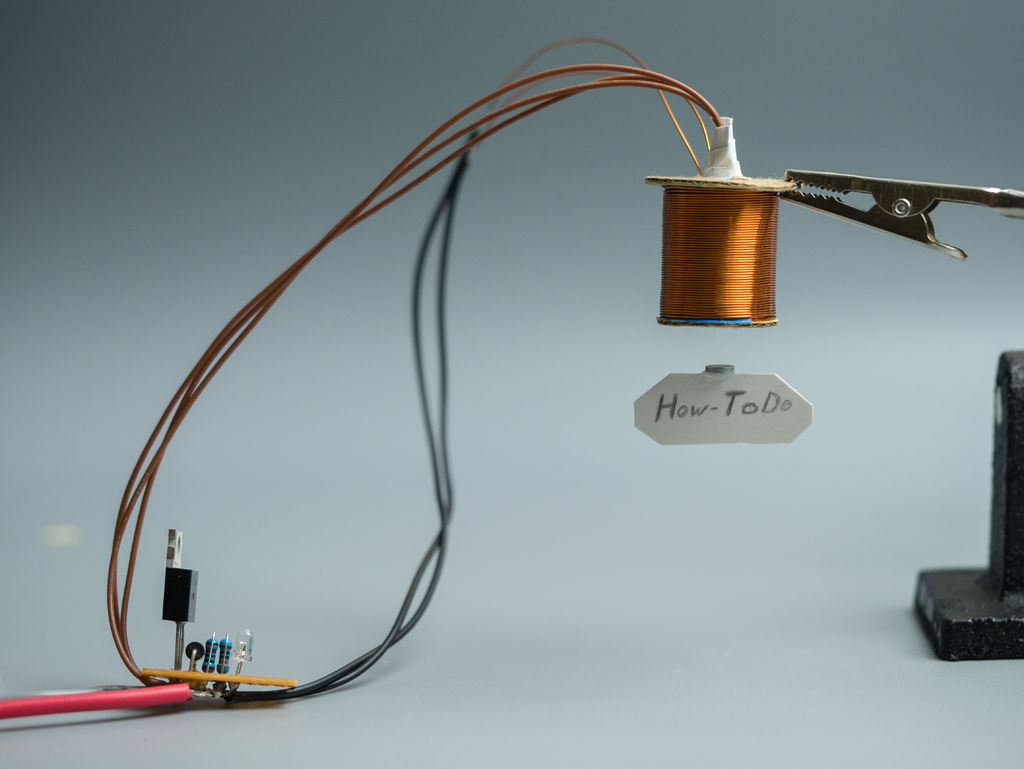
Левитрон своими руками: самодельная схема устройства для левитации в магнитном поле
Идея устройства очень проста, электромагнит поднимает в воздух магнит, а для создания эффекта левитации в магнитном поле, он подключен к высокочастотному источнику, который то поднимает, то опускает объект.

Шаг 1: Схема устройства
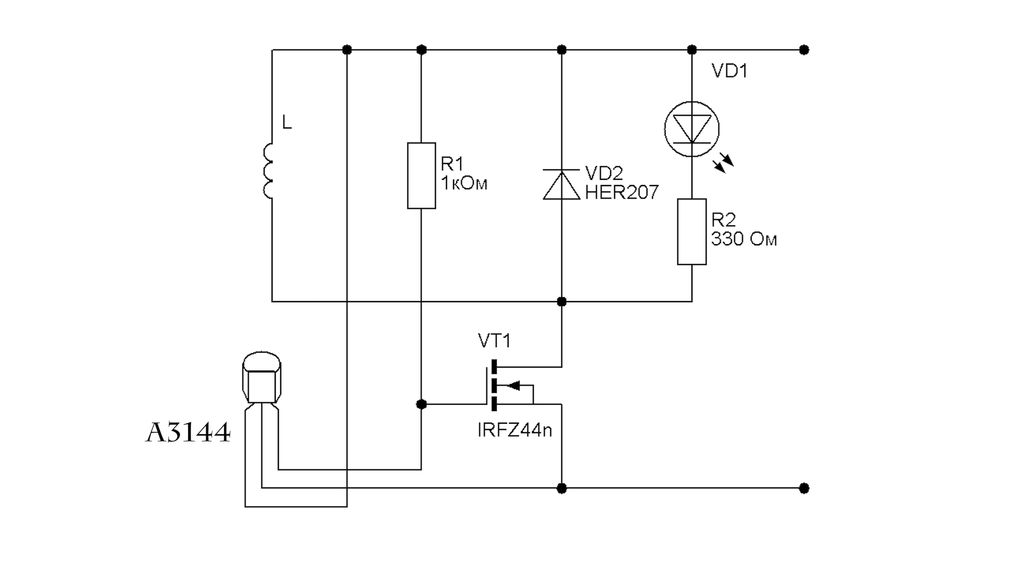
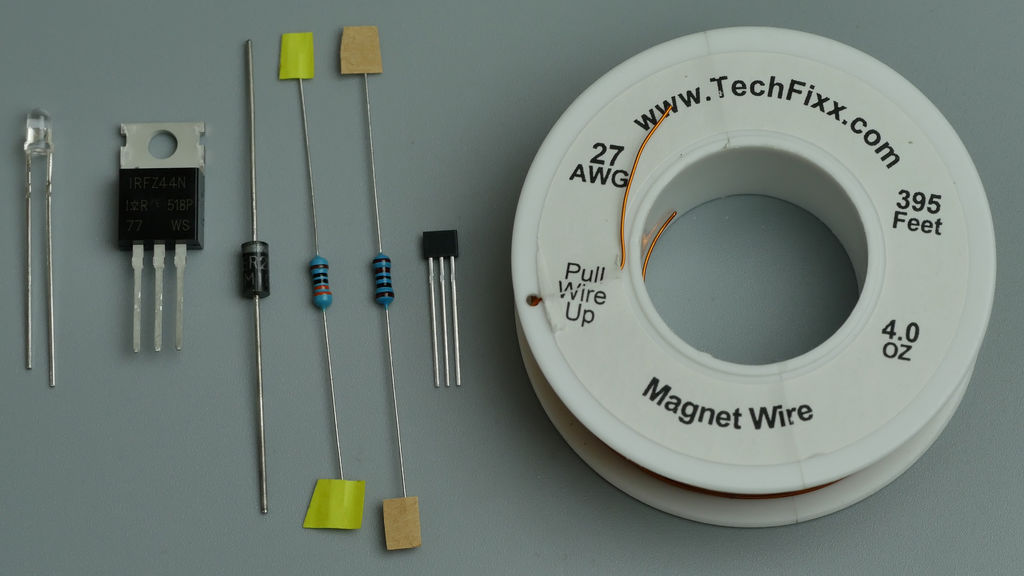
Схема на удивление проста и я полагаю, что у вас не составит труда собрать левитрон своими руками. Вот список компонентов:
- светодиод (любого цвета — это опционально)
- транзистор Irfz44n (или любой подходящий mosfet)
- диод HER207 (с таким же успехом должен работать 1n4007)
- резисторы 1k и 330Om (последний необязателен)
- датчик Холла A3144 (либо аналогичный)
- медный обмоточный провод диаметром 0.3 — 0.4 мм и длиной 20 м
- неодимовые магниты (я использовал 5 * 1 мм)
- 5 вольтовый зарядник для телефона
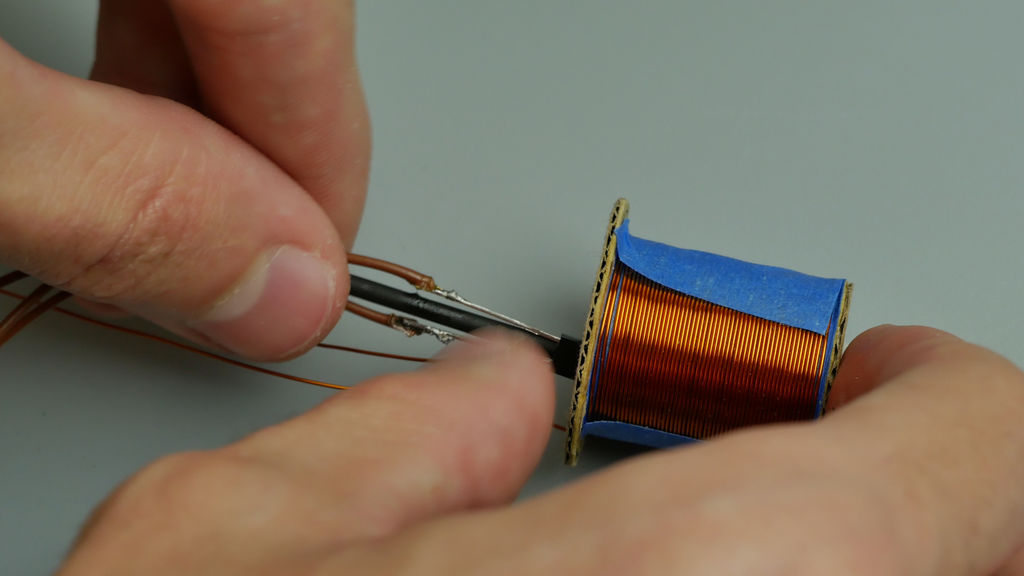
Шаг 2: Сборка
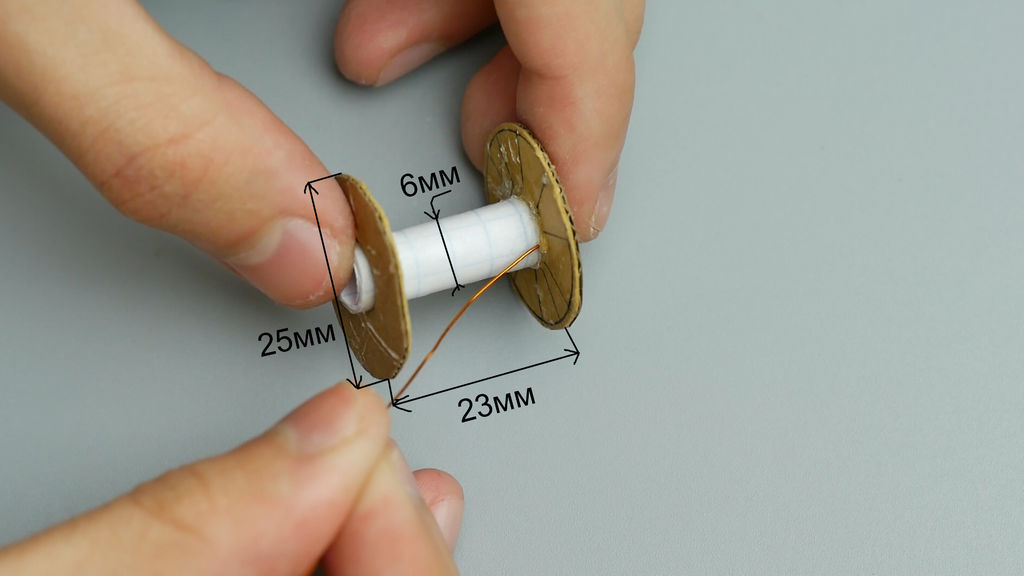
Приступим к сборке. Сперва нам нужно сделать рамку для электромагнита примерно таких размеров: диаметр 6 мм, высота мотка примерно 23 мм, и диаметр ушек около 25 мм. Как видите, изготовить её можно из обычного листа, картона и суперклея. теперь закрепим начало мотка на рамке и расслабимся — нам нужно будет сделать около 550 оборотов, неважно в каком набавлении. Я сделал 12 слоёв, что отняло у меня 1.5 часа.
Шаг 3: Спайка
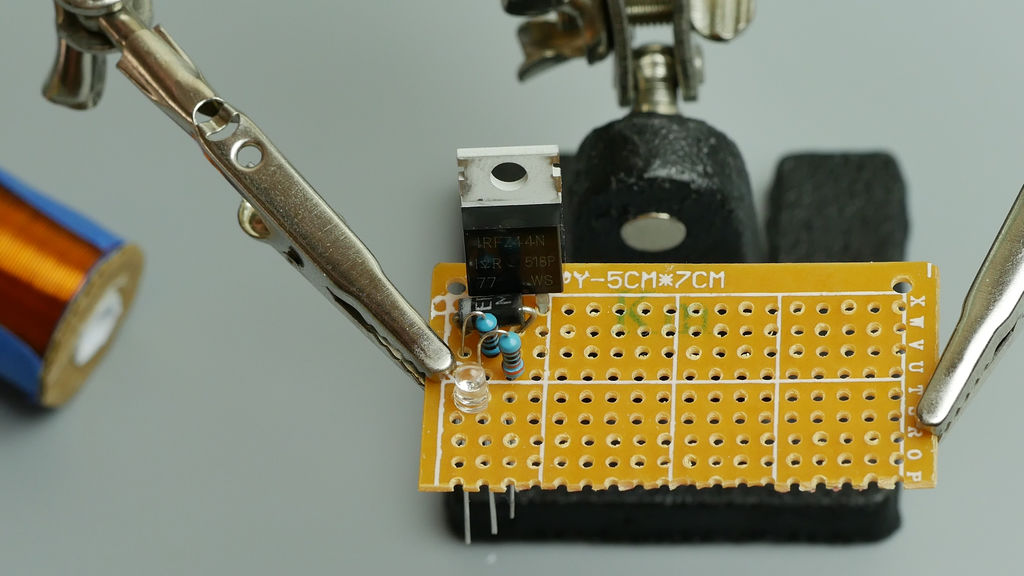

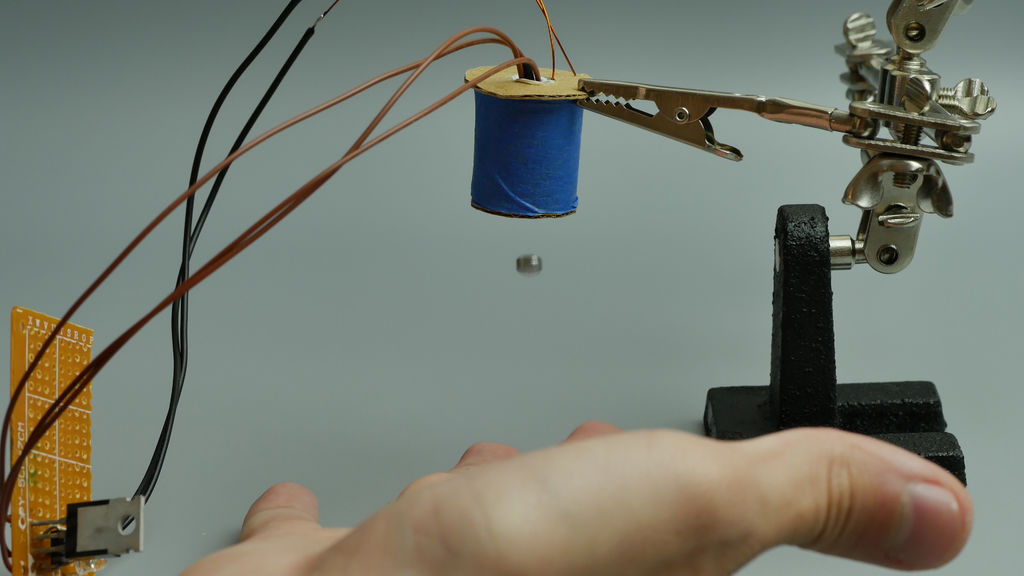
Спаиваем всё по схеме, без каких-либо нюансов. Датчик Холла припаян к проводам, т.к. он будет помещён в катушку. Когда всё спаяете, поместите датчик в катушку, закрепите его, подвесьте катушку и подайте ток. Поднеся магнит, вы почувствуете, что он притягивается или отталкивается, в зависимости от полюса, и пытается зависнуть в воздухе, но неудачно.
Шаг 4: Настройка

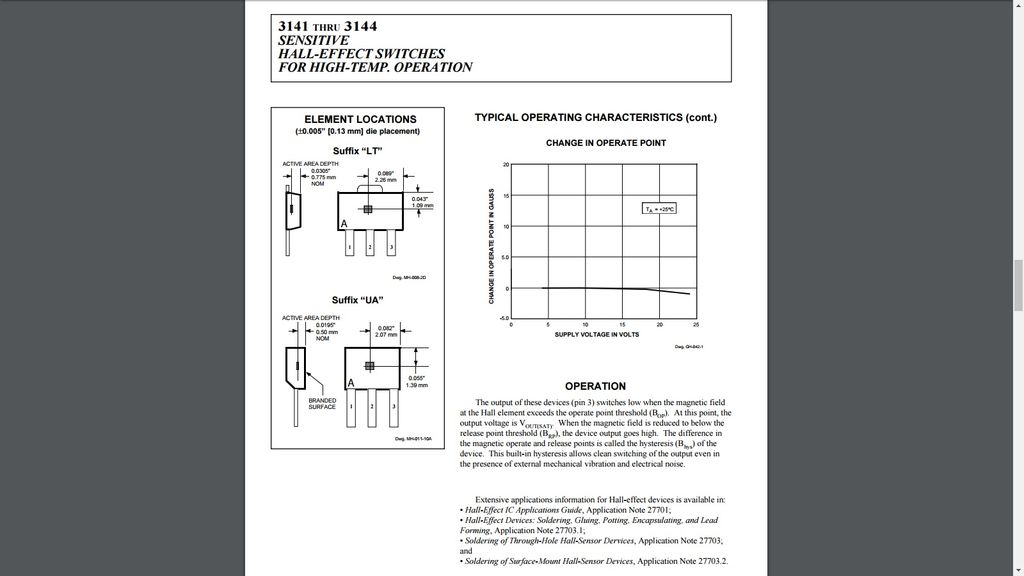

После 30 минут, потраченных над разгадкой вопроса, «почему эта штука не работает?», я пришел в отчаяние и прибегнул к крайним мерам — начал читать спецификацию к датчику, которую создают для таких людей как я. В спецификации имелись картинки, на которых было изображено, какая из сторон чувствительная.
Вытащив датчик и согнув его таким образом, чтобы плоская сторона с надписями была параллельна земле, я вернул его на место — самодельное устройство стало работать заметно лучше, но магнит всё ещё не левитировал. Понять в чём проблема удалось достаточно быстро: магнит в форме таблетки — не самый лучший экземпляр для левитации. Было достаточно сместить центр тяжести к нижней части магнита (я сделал это при помощи куска толстой бумаги ). Кстати, не забудьте проверить, какая сторона магнита притягивается к катушке. Теперь всё работало более или менее нормально и осталось закрепить и защитить датчик.
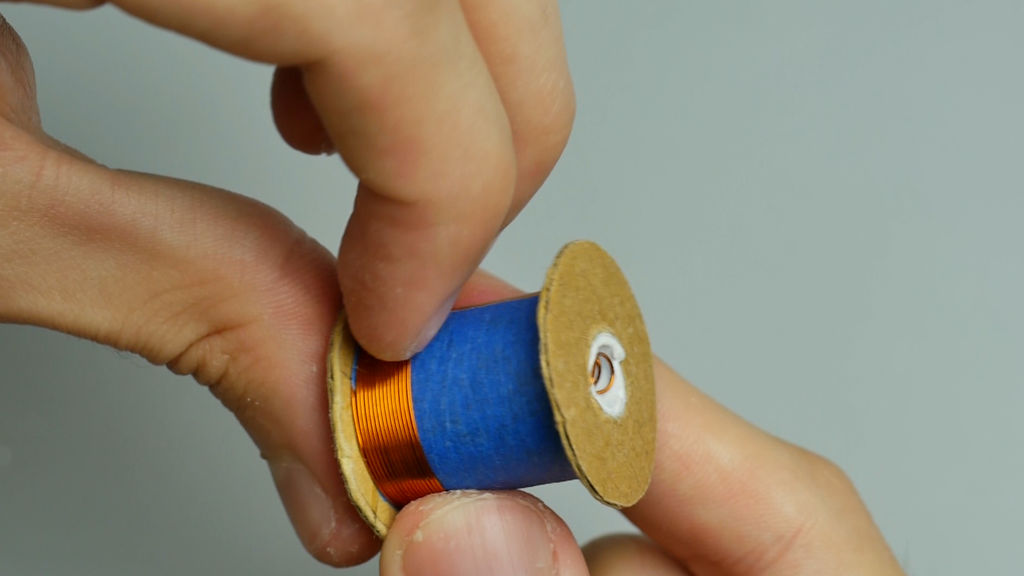
Какие еще нюансы есть в этом проекте? Сначала я хотел использовать адаптер на 12V, но электромагнит быстро грелся, и мне пришлось переключить его на 5V, я не заметил никаких ухудшений в работе, а нагрев был практически устранён. Диод и ограничивающий резистор были практически сразу отключены. Также я снял с катушки синюю бумагу — мотки медной проволоки смотрятся гораздо красивее.
Источник
Левитрон своими руками с датчиком холла
Автор: crocodil, crocodil@mail.ua
Опубликовано 15.01.2014
Создано при помощи КотоРед.

Левитация – одно из воплощений человеческой мечты о полете.

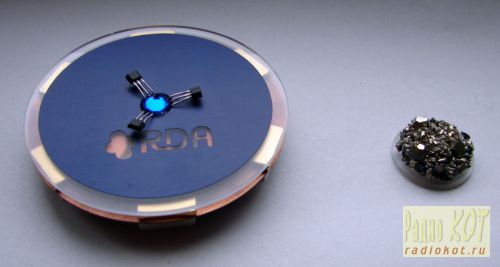
Созерцание парящего кристалла – хороший способ релаксации и пополнения пси-энергии.
Кристаллом мною назван левитирующий неодимовый магнит – он обклеен природными кристаллами пирита и халькопирита и имеет сходство с цельным кристаллом.
Согласно теореме Ирншоу, являющейся следствием закона Гаусса, левитация статических объектов в статическом электромагнитном поле невозможна. Теорема применима не только к точечным зарядам, но и к протяженным упругим телам и говорит, что их свободный подвес в электростатическом, магнитостатическом и (или) гравитационном поле будет всегда неустойчив. Однако существует возможность сделать левитацию реальной, например, используя электронную стабилизацию – электромагниты, управляемые посредством электроники.
Поскольку действительную природу магнетизма и гравитации никто пока не объяснил, то работу левитатора можно описать так:
Суммарная картина магнитных силовых линий неодимовых магнитов, расположенных в основании левитатора представляет собой поле магнитного кольца с прямоугольным поперечным сечением. Видно, что в точках 1 и 2 магнитное поле меняет направление. Если поместить в точку 1 небольшой магнит, то мы почувствуем, что его перемещению по вертикали препятствует магнитное поле кольца и гравитация (вначале он может еще перевернутся). По вертикали он как бы в ловушке. В горизонтальной плоскости наш магнит норовит выскользнуть и притянуться к кольцу. Тут мы ему устраиваем ловушку в горизонтальной плоскости – отслеживаем его положение с помощью датчиков, и далее с помощью 3-х пар электромагнитов A,B,C расположенных в основании левитатора возвращаем его каждый раз в точку 1. Энергия электромагнитов расходуется только на компенсацию небольших смещений левитирующего магнита в горизонтальной плоскости. По сути, энергия только перекачивается из одной пары катушек в другую. Потребление энергии при этом намного меньше, чем в системах, в которых электромагнит сверху – в них он должен еще компенсировать действие на левитирующий предмет силы тяжести.
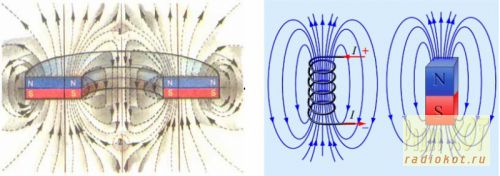
Картина силовых линий магнитного поля кольца, электромагнита и магнита.
При конструировании левитатора я ознакомился с патентом US20070170798: https://www.freepatentsonline.com/20070170798.pdf Вот некоторые рисунки с этого патента:
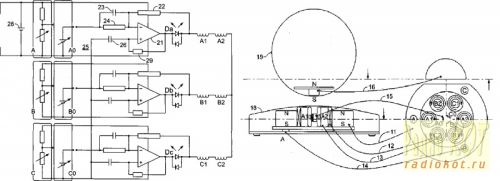
Контроль левитирующего магнита осуществляется с помощью оптических датчиков положения и 3-х пар электромагнитов. Смещение магнита влево компенсируется за счет сочетания действия южного полюса электромагнита A1 и северного полюса электромагнита A2. Конденсатор 23 помогает противостоять любым быстрым смещениям магнита.
Также была использована идея Nicanor Apostol: https://www.youtube.com/user/nick500453/videos для контроля положения левитирующего магнита с помощью датчиков магнитного поля – датчиков Холла.
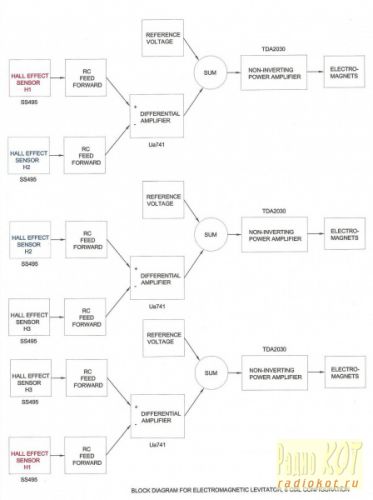
Операционные усилители включены в дифференциальном режиме. Каждый датчик Холла выдает сигнал на два ОУ, на прямой вход одного и инвертирующий другого.
После некоторых раздумий и экспериментов получилась такая схема:
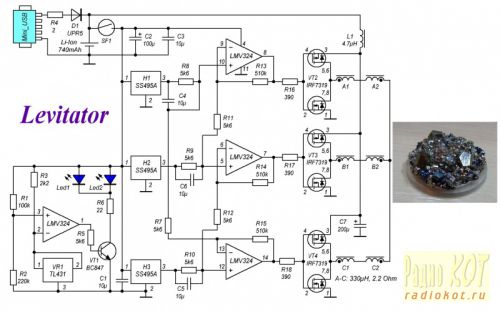
При появлении кристалла в зоне левитации, геркон замыкается и на схему подается питание, она начинает генерировать, возникает самовозбуждение системы – кристалл парит.
Устойчивая левитации кристалла достигается небольшим подгибанием датчиков Холла в вертикальной плоскости. При этом можно ориентироваться на потребление тока левитатором. При точной настройке оно будет менее 100mA, и при попытке сместить левитирующий кристалл по горизонтали в какую-либо сторону будут ощущаться одинаковые усилия. Также при точной настройке практически пропадает шум, связанный с работой электромагнитов. На первом ОУ и TL431 собран супервизор питания. Если при левитации кристалла пропадает синяя подсветка, значит, напряжение батареи менее 3.6V и её следует зарядить.
Кстати, в моем случае наблюдается интересное явление раскручивания кристалла против часовой стрелки. Если его слегка закрутить, то дальше он раскручивается сам – примерно до 50-140 оборотов в минуту, в зависимости от напряжения питания и высоты левитации. Связано это с неоднородностью намагниченности кристалла и с тем, что включенные по схеме звезда электромагниты левитатора в какой-то момент начинают работать подобно трехфазному двигателю.
Катушки электромагнитов использованы с двигателя ведущего вала видеомагнитофона (типа как на фото ниже). Индуктивность каждой 330mkH, сопротивление 2.2 Ohm. Направление намотки этих катушек видно на фото – это важно для правильной работы левитатора. В конструкции использовано шесть неодимовых магнитов 15*5*5мм, шесть 15*6*2мм и один диаметром 20мм, толщиной 5мм в кристалле. ОУ LMV324 можно заменить аналогичным по параметрам «rail to rail op amp». Вместо IRF7319 подойдёт IRF7389. В качестве ферромагнитного сердечника катушек электромагнитов использованы болты и гайки М4, они же и скрепляют всю конструкцию.
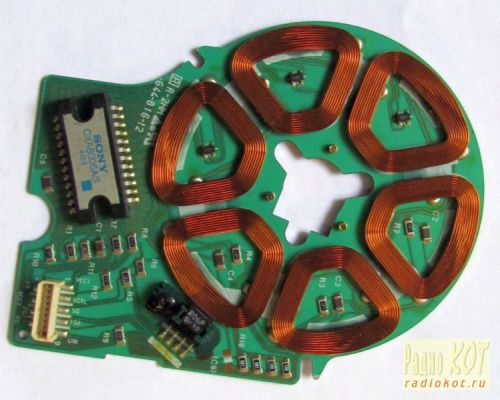
Разводка платы левитатора сделана в одном слое с помощью трассировщика Topo-R: https://eda.eremex.ru/ . На второй стороне платы фольга оставлена, она соединена с «землей» в двух точках. С кромок отверстий под выводы катушек, датчиков, светодиода фольга удалена зенкованием сверлом, диаметр которого в 3. 4 раза больше диаметра отверстий. Стеклотекстолит толщиной 1мм.
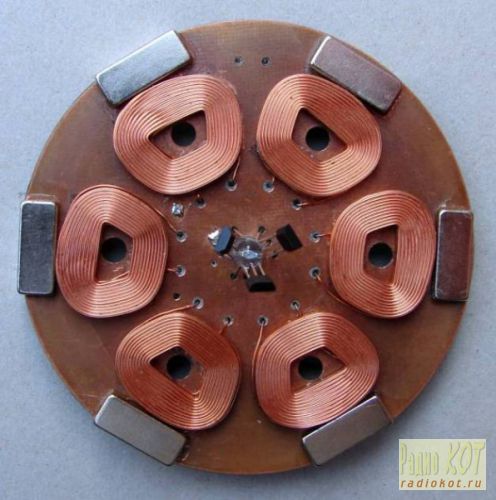
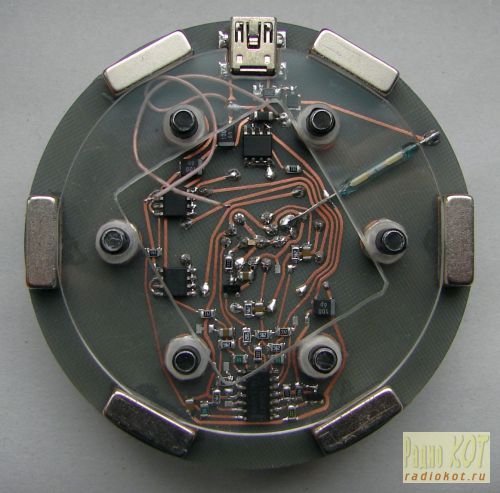
Вид собранной платы с двух сторон. Магниты держатся за счет взаимного притяжения , дополнительно они приклеены к плате суперклеем. Между катушками электромагнитов и платой проложена полоска двухстороннего скотча.

Для полной картины отмечу, что возможны варианты магнитной левитации без всякой электроники: https://www.antigravity.net.au/ . Вот некоторые:
1. Если придать магниту в точке 1 быстрое вращение вокруг вертикальной оси (сделать из него волчок), то он там и будет оставаться. Сам по себе волчок стремится сразу перекувыркнуться и упасть. Раскрученный же волчок этого сделать не может – ему приходится противодействовать моменту инерции. Минус такого решения – ограниченное несколькими минутами время левитации.

2. Известно, что диамагнетики выталкиваются магнитным полем. Если взять кусок пиролитического графита (диамагнетика) – наш магнитик с удовольствием будет над ним левитировать. Минус – небольшая высота левитации, как следствие отсутствия в природе сильных диамагнетиков. Или сильных магнитов в маленьком объеме.

3. Вариант предыдущего случая – использовать «идеальный» диамагнетик, каковым есть по сути сверхпроводник. Например, высокотемпературный сверхпроводник с Пандоры – анобтаниум. Имеем приличную высоту парения сверхпроводника над магнитной подставкой. Минус решения – дороговизна. Нерафинированный анобтаниум стоит около двадцати миллионов долларов за килограмм, очищенный повышает стоимость вдвое – до сорока миллионов.
 Этот серый камушек идет по 20 миллионов за кило.
Этот серый камушек идет по 20 миллионов за кило.
Предвидя вопросы, отвечу на некоторые из них:
1. Парящий кристалл есть нельзя, он не вкусный и не съедобный.
2. Если ты думаешь, что как магнитный железняк может притягивать железо, ты так же можешь заставить его притянуть куски керамики, то ты заблуждаешься,… магнитный железняк может притягивать железо, но не взаимодействует с медью. Таково движение Дао (из китайского философского трактата Хуайнань-цзы).
3. Именно анобтаниум вызвал появление на Пандоре таких изумительных геологических достопримечательностей, как каменные арки и парящие горы.

Разводку платы прилагаю. 🙂
. И некоторые идеи вдогонку — вариант Levi_2 (разводку платы прилагаю):
Отличие – низ левитатора подсвечивается 2-мя светодиодами, которые вынесены ближе к краям платы. Должно смотреться эффектнее, ярче.
Подсветку внизу можно сделать другим цветом, при разряде батареи будет пропадать только нижняя подсветка.
В качестве левитирующего кристалла заманчиво применить флюорит — флюоресцирующий минерал. Cиний светодиод подсветки поменять на ультрафиолетовый ..
Источник
Как самому собрать аналоговый левитрон
0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:

2.Фунциональная схема
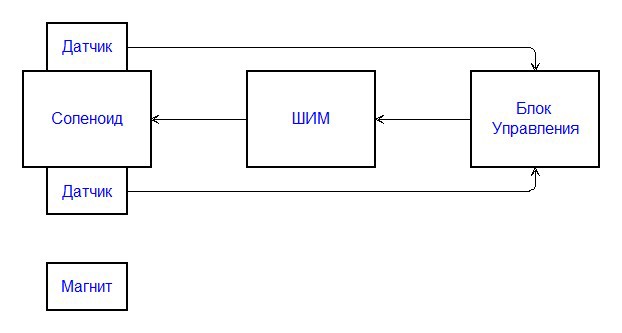
Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
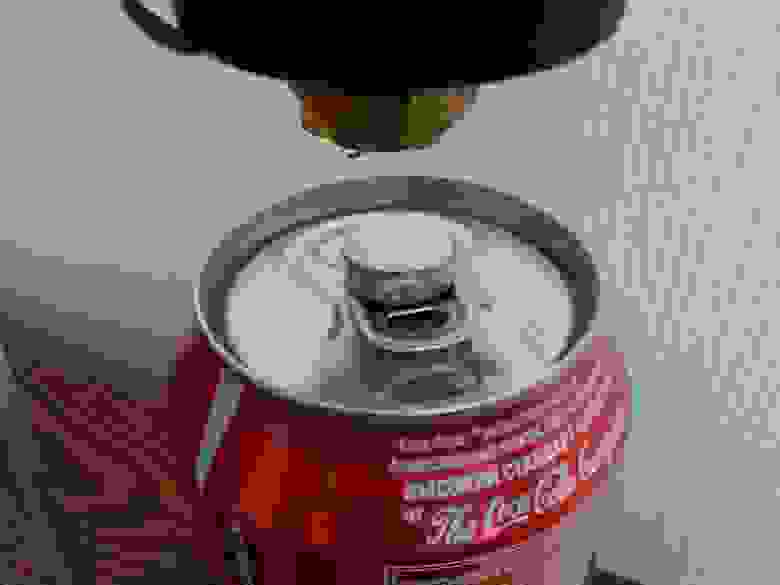
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.
4.Принципиальная схема
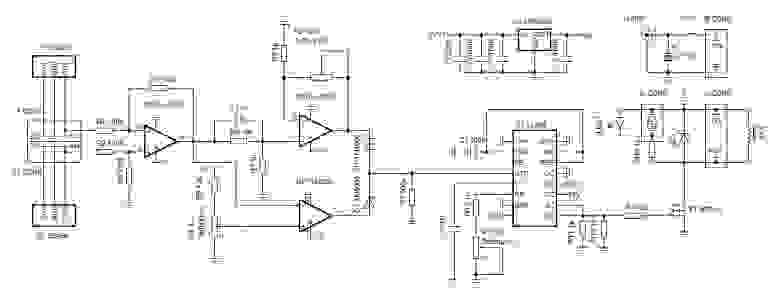
Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.



5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:
Источник



