
- Левитрон своими руками: самодельная схема устройства для левитации в магнитном поле
- Шаг 1: Схема устройства
- Шаг 2: Сборка
- Шаг 3: Спайка
- Шаг 4: Настройка
- Как самому собрать аналоговый левитрон
- 0.Предисловие
- 1.Краткое описание
- 2.Фунциональная схема
- 3.Конструкция
- 4.Принципиальная схема
- 5.Выбор компонентов
- 6.Заключение
- Левитрон на датчике холла своими руками
- Схема левитрона
- Испытание Левитрона
- Видео самоделки — Левитрон с управляемым подвесом
- Похожее
- Аналоговый левитрон на ШИМ
- Магнитный левитатор
- Магнитная левитация
- Несколько советов и замечаний
- Материалы по теме
- Левитрон на датчике Холла Собрать своими руками — 19 Января 2014 — Лаборатория самодельщика
- Левитирующий ночник
- Левитрон самодельный
- Схема электрическая левитрона с датчиком Холла
- Графики сигналов в контрольных точках
- Левитрон на датчике Холла и полевом транзисторе своими руками
Левитрон своими руками: самодельная схема устройства для левитации в магнитном поле
Идея устройства очень проста, электромагнит поднимает в воздух магнит, а для создания эффекта левитации в магнитном поле, он подключен к высокочастотному источнику, который то поднимает, то опускает объект.

Шаг 1: Схема устройства
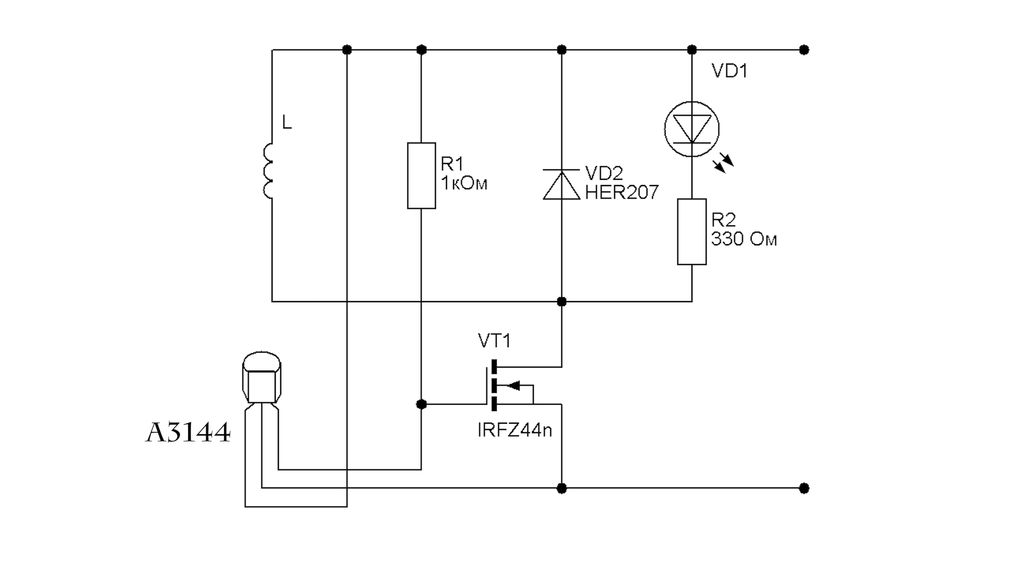
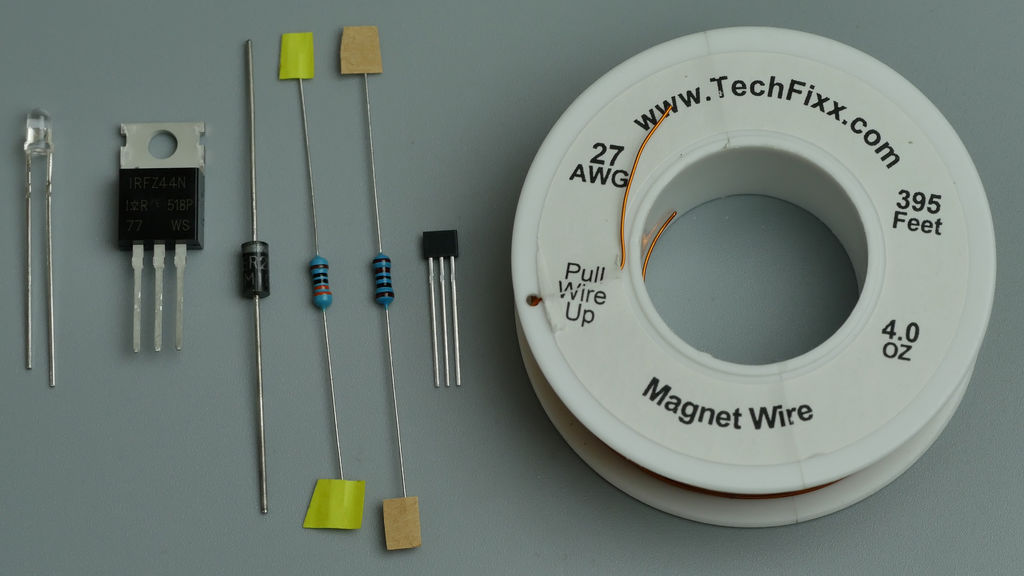
Схема на удивление проста и я полагаю, что у вас не составит труда собрать левитрон своими руками. Вот список компонентов:
- светодиод (любого цвета — это опционально)
- транзистор Irfz44n (или любой подходящий mosfet)
- диод HER207 (с таким же успехом должен работать 1n4007)
- резисторы 1k и 330Om (последний необязателен)
- датчик Холла A3144 (либо аналогичный)
- медный обмоточный провод диаметром 0.3 — 0.4 мм и длиной 20 м
- неодимовые магниты (я использовал 5 * 1 мм)
- 5 вольтовый зарядник для телефона
Шаг 2: Сборка
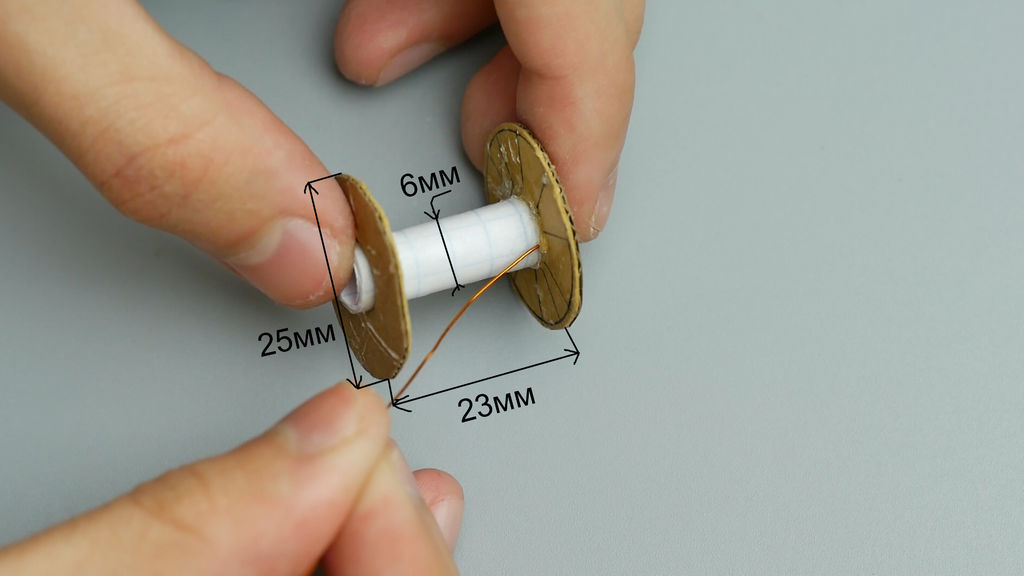
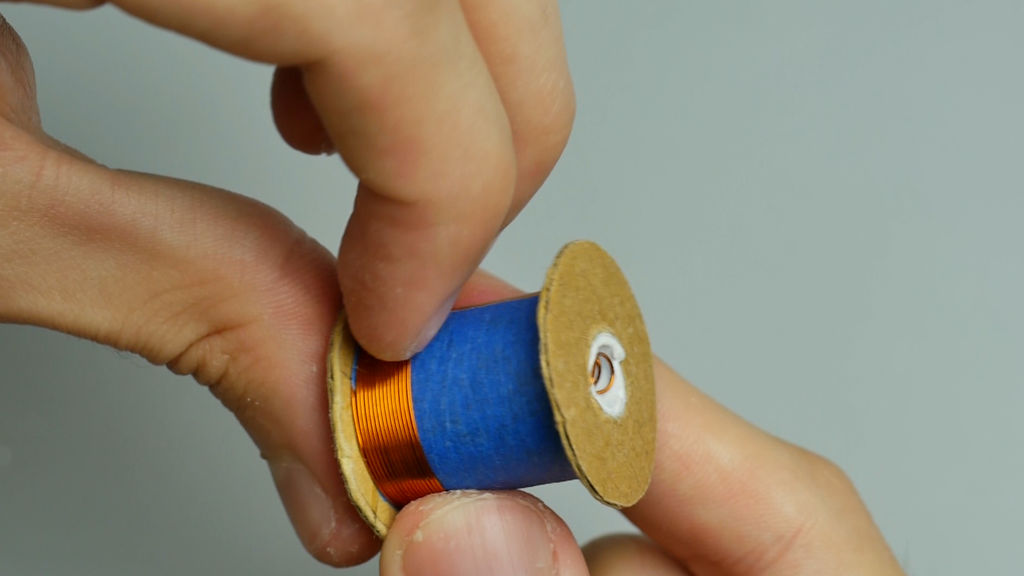
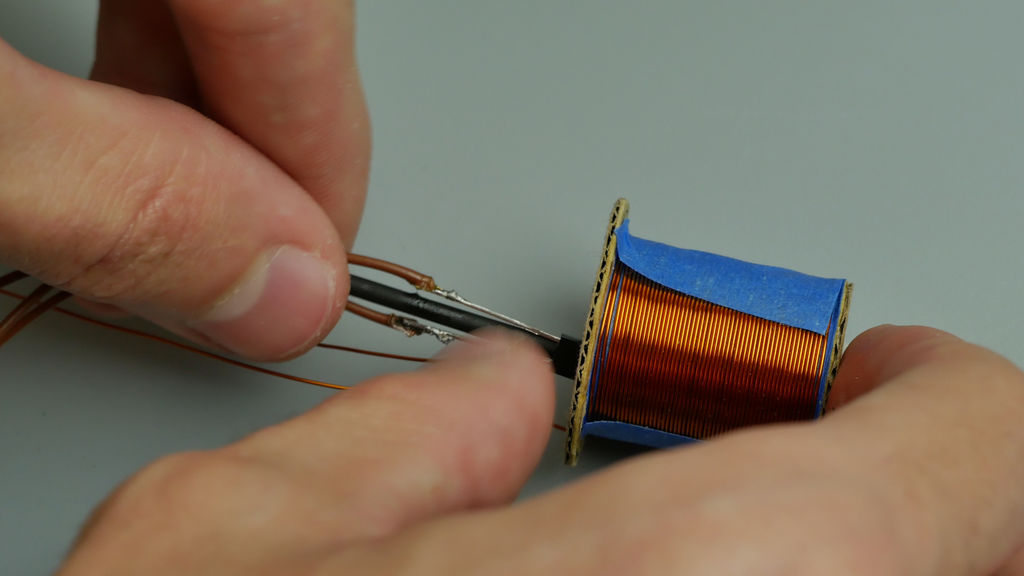
Приступим к сборке. Сперва нам нужно сделать рамку для электромагнита примерно таких размеров: диаметр 6 мм, высота мотка примерно 23 мм, и диаметр ушек около 25 мм. Как видите, изготовить её можно из обычного листа, картона и суперклея. теперь закрепим начало мотка на рамке и расслабимся — нам нужно будет сделать около 550 оборотов, неважно в каком набавлении. Я сделал 12 слоёв, что отняло у меня 1.5 часа.
Шаг 3: Спайка
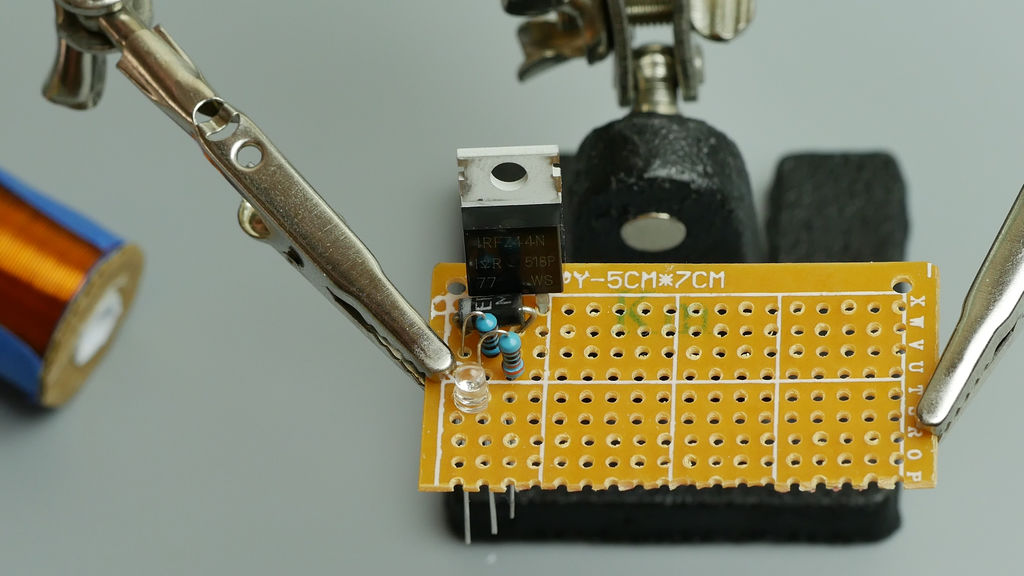

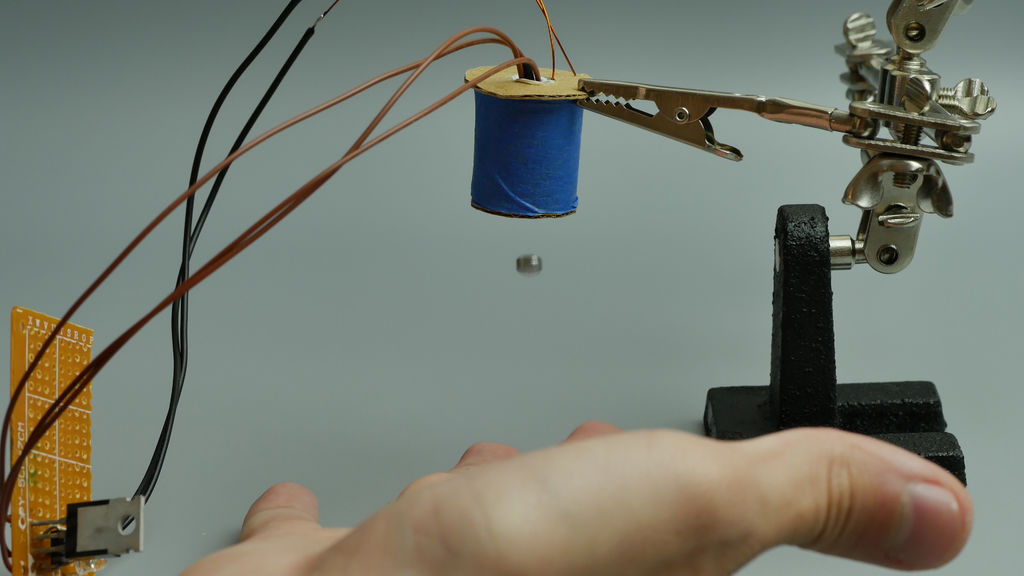
Спаиваем всё по схеме, без каких-либо нюансов. Датчик Холла припаян к проводам, т.к. он будет помещён в катушку. Когда всё спаяете, поместите датчик в катушку, закрепите его, подвесьте катушку и подайте ток. Поднеся магнит, вы почувствуете, что он притягивается или отталкивается, в зависимости от полюса, и пытается зависнуть в воздухе, но неудачно.
Шаг 4: Настройка

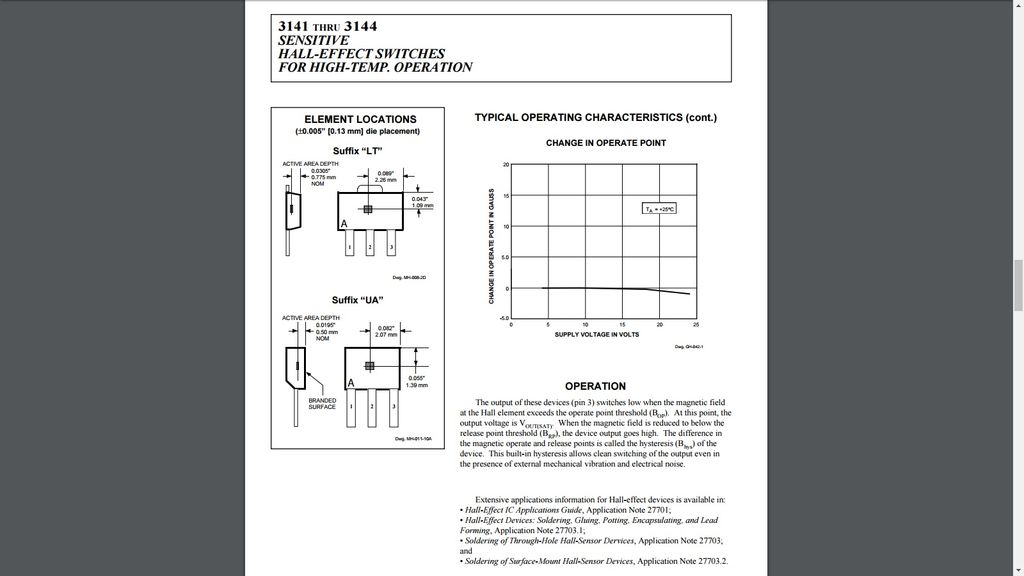

После 30 минут, потраченных над разгадкой вопроса, «почему эта штука не работает?», я пришел в отчаяние и прибегнул к крайним мерам — начал читать спецификацию к датчику, которую создают для таких людей как я. В спецификации имелись картинки, на которых было изображено, какая из сторон чувствительная.
Вытащив датчик и согнув его таким образом, чтобы плоская сторона с надписями была параллельна земле, я вернул его на место — самодельное устройство стало работать заметно лучше, но магнит всё ещё не левитировал. Понять в чём проблема удалось достаточно быстро: магнит в форме таблетки — не самый лучший экземпляр для левитации. Было достаточно сместить центр тяжести к нижней части магнита (я сделал это при помощи куска толстой бумаги ). Кстати, не забудьте проверить, какая сторона магнита притягивается к катушке. Теперь всё работало более или менее нормально и осталось закрепить и защитить датчик.
Какие еще нюансы есть в этом проекте? Сначала я хотел использовать адаптер на 12V, но электромагнит быстро грелся, и мне пришлось переключить его на 5V, я не заметил никаких ухудшений в работе, а нагрев был практически устранён. Диод и ограничивающий резистор были практически сразу отключены. Также я снял с катушки синюю бумагу — мотки медной проволоки смотрятся гораздо красивее.
Источник
Как самому собрать аналоговый левитрон
0.Предисловие
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:

2.Фунциональная схема
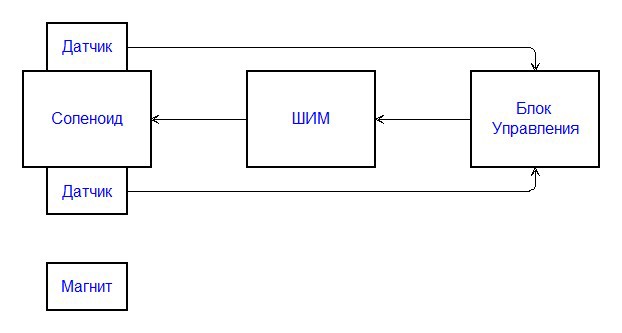
Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
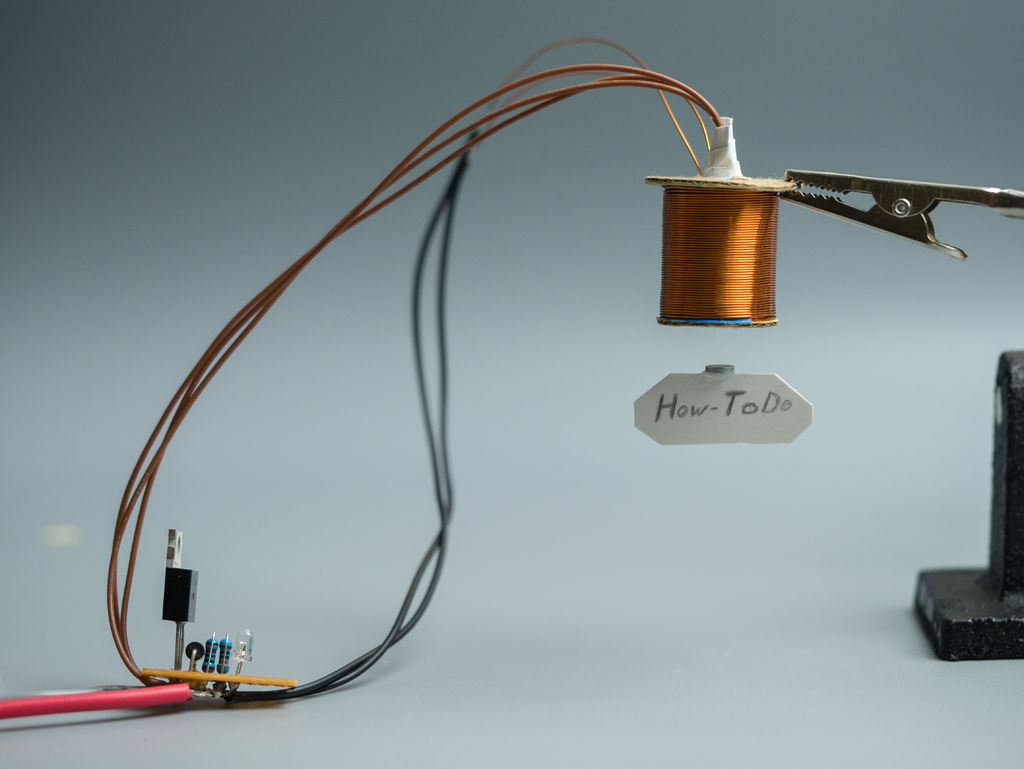
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
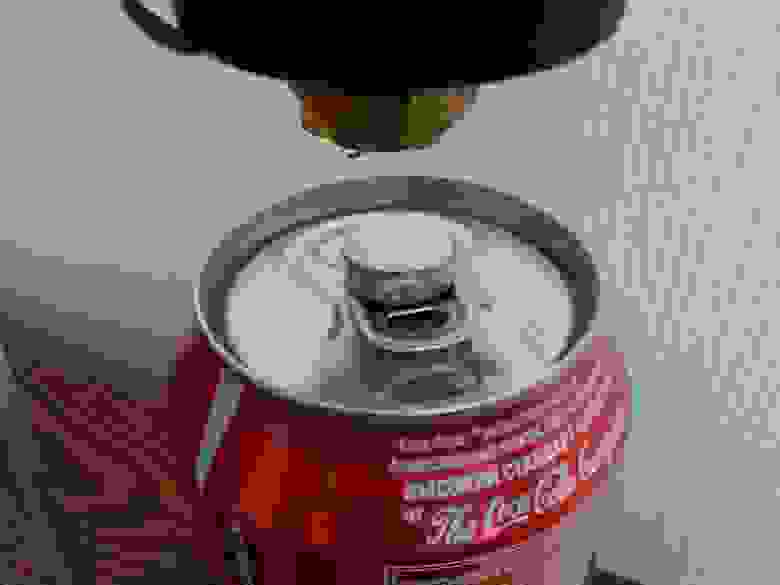
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.
4.Принципиальная схема
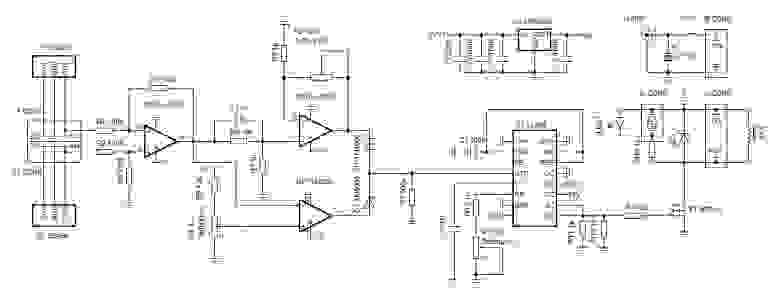
Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.



5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:
Источник
Левитрон на датчике холла своими руками
Данная самоделка представляет собой Левитрон с управляемым подвесом. Конструкция и схема достаточно просты, так что собрать её будет под силам даже не очень опытному радиолюбителю и любителю самоделок. В статье описана пошаговая инструкция сборки левитрона, следуя её, проблем с работоспособностью возникнуть не должно!
Схема левитрона

Первым делом необходимо собрать корпус куда будет монтироваться вся схема, в том числе и катушка. Корпус можно изготовить по схеме ниже либо придумать свой вариант.

Первым делом из фанеры вырезаем все детали нижнего основания и при помощи клея ПВА собираем его.


Затем выпиливаем элементы стоек и так же с помощью клея склеиваем их.

Далее устанавливаем стойки на основание используя клей, как показано на фото ниже.


Далее из тонкого пластика нужно вырезать заглушку для основания корпуса и при помощи супер клея приклеить её.


После того как корпус собран, можно покрасить его в любой цвет, так он станет однотонным и привлекательным на вид, но это не обязательно конечно.

Далее переходим непосредственно к сборке схемы.
Перед сборкой схемы необходимо установить монтажную плату в корпус используя прокладку. Прокладка нужна для того, что бы обеспечить расстояние между корпусом и платой, что бы ножки деталей полностью заходили в отверстия и не возникало проблем при монтаже.
- Далее просверливаем два отверстия в верхней части корпуса и в боковой, в них будут продеваться монтажные провода.
Затем вырезаем деталь где делаем отверстия для светодиода и переключателя. Эта деталь будет случить креплением для катушки.
- При помощи супер клея, устанавливаем эту деталь на стойку.
Далее необходимо намотать катушку. Для её расчёта нужно использовать программу Coil32, только с помощью этой программы можно добиться максимальных показателей.
- Теперь необходимо подобрать стержень, его диаметр должен составлять 10 мм.
- Далее отрезаем кусок бумаги от листа А4, проклеиваем его и накручиваем на стержень для для того, что бы получить прочное основание с соответствующим внутренним диаметром.
- Затем вырезаем пластиковые стенки диаметром 45 мм.
- Далее надеваем стенки на стержень так, что бы расстояние между ними составляло 30 мм.
- С помощью супер клея промазываем внешние края стенок и основания для из фиксации.
- Аккуратно продеваем провод.
- И далее наматываем 1750 витков.
- Обрезаем провод с запасом, делаем надрез на стенке, укладываем туда конец провода и термоклеем фиксируем него, для того что бы избежать распускания.
- Затем с помощью лезвия убираем все неровности.
Наша катушка готова. Теперь при помощи супер клея устанавливаем её на корпус, как на фото ниже.
Далее припаиваем все детали и провода схемы на монтажную плату. Обратите внимание что переключатель и светодиод устанавливаются не на плату а на корпус.
- Далее укладываем продеваем все провода в заранее подготовленные отверстия.
- Затем устанавливаем на корпус переключатель и светодиод и сразу же их припаиваем к отведенным для них проводам.
Затем припаиваем провода катушки и датчики холла. Длина проводов датчиков холла должна быть достаточной что бы достать до конца катушки.
- Затем сгибаем датчики холла областью сенсора наружу.
Теперь при помощь изоленты крепим датчики как показано на рисунке ниже. Такой способ крепления в будущем, позволит без проблем менять расстояние между сенсорами. Дополнительно необходимо зафиксировать датчики с помощью канцелярских резинок.
Затем продеваем датчики в отверстие катушки и центруем их. Для этих целей и надевалась дополнительно канцелярская резинка.
- При помощи пластиковых хомутов фиксируем все провода.
- Теперь наш левитрон готов к эксплуатации!
Испытание Левитрона
- Подключаем блок питания.
- Меняя расстояние между датчиками, мы так же меняем длину хода подвеса.
- Всё что остаётся сделать, это поместить магнит в зону датчика и наслаждаться чудесами левитации! ))
Видео самоделки — Левитрон с управляемым подвесом
Похожее
Аналоговый левитрон на ШИМ
- Здесь рассказано и показано, как сделать крутой левитрон своими руками!
- Эту поделку меня вынудили собрать в универе 🙂
- Делал я её в паре с одногруппником, задачей которого было сделать чумовой корпус, а с меня — электронную начинку.
- Насколько всё классно получилось — судите сами, пишите комментарии, интересно будет почитать, обсудить.

Не помню, как именно мы пришли именно к идее сделать левитрон, тема поделки была вольная. Конструкция вроде и простая, но глаз притягивает.
Вообще сам левитрон — устройство, которое поддерживает какой-либо предмет в среде, которая никак не соприкасается с какой-либо поверхностью, кроме как через воздух. В вакууме тоже будет работать.
В данном случае электроника заставляет парить магнит, а магнит уже можно приклеить к, например, банке из-под вкусного недорогого напитка 🙂
Если хорошенько поискать в интернете, то можно увидеть много разных вариантов электромагнитного левитрона, например:
Их можно условно разделить на подвесной и отталкивающий. Если в первом случае необходимо просто компенсировать силу тяжести, то во втором ещё и смещение в горизонтальной плоскости, так как согласно теореме Ирншоу «всякая равновесная конфигурация точечных зарядов неустойчива, если на них кроме кулоновских сил притяжения и отталкивания ничто не действует.» — цитата из вики.
Из этого вытекает, что подвесной левитрон проще в изготовлении и настройке, если таковая вообще необходима.
Сильно заморачиваться не хотелось, поэтому для универа сделали подвесной левитрон, о котором здесь идёт речь, а отталкивающий уже делал для себя любимого 🙂 О нём в другой статье будет написано.
Чуть позднее удалю этот текст и дам тут ссылку на него. Работает великолепно, но минусы свои тоже имеет.
В свою очередь все подвесные левитроны можно так же условно разделить на цифровые и аналоговые по способу удержания предмета на одном расстоянии. А по типу датчиков их можно разделить на оптические, электромагнитные, звуковые и, наверное, всё.
Итого мы представили подвесной левитрон с цифровым регулированием высоты (ШИМ сигнал тут рулит) с электромагнитными датчиками Холла.
То есть сигнал о расстоянии магнита до левитрона мы получаем аналоговый, а корректируем силу воздействия на магнит уже цифровым способом. Hi-tech, однако.
Сама идея была позаимствована на сайте geektimes, а печатная плата была изготовлена уже персонально под наш набор деталей.
Так же в исходном проекте были использованы трёхвыводные датчики SS49, но сроки были весьма сжатые, у нас они стоили мягко говоря неоправданно дорого ($4 за штуку против $6 за 10 штук в китае — ссылка для примера), поэтому мы использовали четырёхвыводные датчики Холла. Пришлось изменить схему и внести конструктивные дополнения в устройство.
Так же для большей понтовости был добавлен блок светодиодов, которые плавно загораются при поднесении магнита, то есть когда левитрон начинает работать и плавно выключаются, когда магнит убирают. Всё это будет отражено на схеме.
Собственно, схема левитрона на четырёхвыводных датчиках:

И схема левитрона на трёхвыводных датчиках и более простой подсветкой:

Принцип действия довольно прост. Катушка, являющаяся электромагнитом при подаче питания притягивает магнит — предмет притягивается. Датчик, прикреплённый между магнитом и катушкой фиксирует увеличение магнитного потока, что означает приближение магнита. Электроника это отслеживает и отключает катушку от источника напряжения. Магнит начинает падать под действием силы тяжести.
Датчик фиксирует уменьшение магнитного потока, что сразу же обнаруживается электроникой и на электромагнит подаётся напряжение, магнит притягивается — и так происходит очень часто — около 100 тысяч раз в секунду. Возникает динамическое равновесие. Человеческий глаз не успевает заметить этого. Частота генератора задаётся резистором и конденсатором на выводах 5 и 6 микросхемы TL494.
Второй датчик на другой стороне электромагнита нужен для того, чтобы компенсировать магнитное поле, создаваемое самой катушкой. То есть, если бы не было этого второго датчика — при включении электромагнита система бы не могла отличить интенсивность магнитного поля неодимового магнита от магнитного поля, создаваемого самим электромагнитом.
Итак, мы имеем систему двух датчиков, сигнал с которых поступает на операционный усилитель в дифференциальном включении. Это значит, что на выходе операционного усилителя появляется лишь разность напряжений, получаемых с датчиков.
Для примера. На одном из датчиков на выходе напряжение 2,5 В, а на другом — 2,6 В. На выходе будет 0,1 В. Этот дифференциальный сигнал находится на выводе 14 микросхемы LM324 по схеме.
Далее этот сигнал поступает на два следующих операционных усилителя — OP1.1, OP 1.3, выходные сигналы которых через диодный вентиль идут на 4 вывод микросхемы TL494. Диодный вентиль на диодах D1, D2 пропускает только одно из напряжений — то, которое будет больше по номиналу.
Вывод №4 ШИМ контроллера рулит следующим образом — чем выше напряжение на этом выводе — тем меньше скважность импульсов.
Резистор R9 предназначен для того, чтобы в ситуации, когда на входах диодного вентиля напряжения меньше 0,6 В — вывод №4 был однозначно притянут к земле — при этом ШИМ будет выдавать максимально большую скважность.
Вернёмся к операционным усилителям OP1.1, OP 1.3. Первый служит для выключения ШИМ контроллера, пока магнит находится на достаточно большом расстоянии от датчика, чтобы катушка не работала на максимуме вхолостую.
С помощью OP 1.3 задаём коэффициент усиления дифференциального сигнала — по сути задаёт глубину обратной связи (ОС). Чем сильнее обратная связь — тем сильнее система будет реагировать на приближение магнита.
Если глубина ОС не достаточна — магнит можно будет поднести вплотную, а прибор не начнёт снижать мощность, накачиваемую в электромагнит.
А если глубина ОС будет слишком большая — то скважность начнёт падать до того, как сила притяжения магнита сможет его удерживать на этом расстоянии.
Переменный резистор P3 ставить не обязательно — он служит для настройки частоты генератора.
OP1.2 является генератором напряжения 2,5 В, необходимый для четырёхвыводных датчиков. Для трёхвыводных датчиков типа SS49 он не нужен.
Забыл упомянуть о элементах C1, R6 и R7. Их фишка в том, что постоянный сигнал здесь урезается в 10 раз за счёт резисторов, а переменный за счёт конденсатора спокойно проходит дальше, тем самым достигается упор работы схемы на резкие изменения расстояния магнита до датчика.
- Диод SD1 предназначен для гашения обратных выбросов в момент отключения напряжения на электромагните.
- Узел на T2 позволяет плавно включать и выключать светодиодную линейку при появлении импульсов на электромагните.
- Перейдём к конструктивному исполнению.
Одним из ключевых моментов в левитроне является электромагнит. Мы делали каркас на основе какого-то строительного болта, на котором были вырезаны круглые бортики из фанеры.

Магнитный поток здесь зависит от нескольких ключевых факторов:
- наличие сердечника;
- геометрия катушки;
- ток в катушке
Если проще, то чем больше катушка и больший ток течёт в ней — тем сильнее она притягивает магнитные материалы.
В качестве обмотки использовали провод ПЭЛ 0,8 мм. Мотали на глаз, пока размеры катушки не показались внушительными. Получилось следующее:


Найти необходимый провод в наших краях может не получиться, однако вполне легко находится в интернет магазинах — провод 0,4 мм для намотки катушки.
Далее был отрезан болт, чтобы он не выступал за пределы бортика, чтобы было удобно крепить датчик.

А пока моталась катушка была подготовлена и вытравлена плата. Делалась по технологии ЛУТ, рисунок платы был сделан в программе Sprint LayOut. Скачать плату левитрона можно по ссылке.

Травилась плата в остатках аммония персульфата, пустая банка которого была успешно применена далее в этом проекте 🙂

Хочу отметить, что размещение деталей, а так же разводка дорожек подразумевают очень аккуратную пайку, так как легко наделать соединений там, где их быть не должно. Если таковых навыков нету — вполне дозволительно это сделать компонентами больших размеров на макетной плате, типо такой, а соединения выполнять с помощью проводов с обратной стороны.
По итогу плата получилась такая:

- Плата очень эргономично вписалась в габариты катушки и была прикреплена прямо на неё с помощью могучего термоклея, тем самым превращаясь в единый моноблок — подключил питание, настроил и система работает.
Но это всё было до того, как был готов электромагнит. Плата была сделана немного раньше и чтобы хоть как-то протестировать работоспособность устройства была временно подключена менее габаритная катушка. Первый результат порадовал.
Датчики, как уже писалось выше, применены от систем слежения положения BLDC двигателей, четырёхвыводные. Так как не удалось найти на них документацию пришлось опытным путём выяснять, какие выводы за что отвечают. Форм-фактор получился такой:
- Тем временем подоспел крупногабаритный электромагнит. Эта штука вселяла большую надежду 🙂
Первые испытания с большим электромагнитом показали довольно большое рабочее расстояние. Тут есть один нюанс — датчик, который расположен на стороне неодимового магнита должен быть немного дальше от катушки для уверенного срабатывания электроники.
Последнее фото больше напоминает некий космический спутник. Кстати, именно так и можно было бы оформить этот левитрон. И у тех, кто намерен повторить конструкцию — всё впереди 🙂
Неодимовые магниты были заказаны в Минске, разных форм и размеров. Опять же, из-за спешки. А так, у китайцев тоже можно легко найти: раз, два, три.
В качестве левитирующего предмета было решено использовать банку прохладительного напитка. Лепим на двухсторонний скотч магнит к банке, проверяем.
Работает прекрасно, в целом, устройство можно считать готовым. Осталось внешнее оформление. Из брусков и палок была сделана опорная балка, корпус нашего моноблока был выполнен из той самой пустой пластиковой банки из-под аммония персульфата. Из моноблока выходит всего два провода на питание, как и задумывалось.
- К этому моменту уже была напаяна навесным монтажом схема плавного включения линейки светодиодов, сама линейка успешно примонтирована на вездесущий термоклей.
- В качестве блока питания выступает позаимствованный у какого-то принтера блок, переделанный с 42 В на 12 В.
- Внешний вид блока питания тоже покажу 🙂
- Похожий по характеристикам блок питания в интернете.
Далее из фанеры была сделана подставка, в котором помещался блок питания и разъём для подключения 220 В. Наверху была наклеена матерчатая ткань для красоты, вся конструкция окрашена в жёлто-чёрный цвет. Банку поменяли, так как в ходе экспериментов она немного помялась.
- Из этого всего помимо эффекта левитации получился ещё очень даже замечательный ночник.
- Видео добавлю чуть позднее, а пока в довершение всему хочу сказать, что мою конструкцию легко повторил 13-летний учащийся моего радиокружка.
- Пока ещё внешний вид до законченного варианта не доведён, но электронная начинка работает как положено. Фото его конструкции:
Магнитный левитатор
- Pete
- Back Shed
- Этот одновременно забавный и поучительный проект демонстрирует магнитную левитацию.
Магнитная левитация
Однажды я увидел устройство, в котором магнит парил в воздухе и, задавшись вопросом, как это сделано, решил проверить некоторые теории. После многих проб и ошибок мне удалось получить то, что вы можете видеть на Рисунке 1.
| |||
| Рисунок 1. | Магнитная левитация в действии. |



Основные элементы устройства – катушка, создающая магнитное поле, и установленный на ее торцевой поверхности линейный датчик Холла, необходимый для обнаружения поля постоянного магнита.
Под контролем этого датчика при приближении постоянного магнита ток катушки выключается, магнит начинает падать, удаляясь от катушки, и катушка включается опять, эффективно удерживая магнит «подвешенным» в воздухе.
Эмалированным медным проводом сечением 0.45 мм я намотал небольшую катушку (Рисунок 2).
Ее размеры и количество витков не столь важны, как электрическое сопротивление, которое должно быть достаточно большим, чтобы ограничить ток, забираемый от источника питания. Я стремился не выйти за пределы 0.
5 А при напряжении питания 5 В, для чего сопротивление должно было находиться в диапазоне от 10 до 15 Ом (5 В/0.5 А = 10 Ом).
 | |
| Рисунок 2. | Электромагнитная катушка. |
Однако, поскольку схема теперь доработана таким образом, чтобы в отсутствие магнита ток катушки выключался, ее сопротивление можно снизить, но до значения не менее 5 Ом.
Поскольку собственной мощности катушки недостаточно, ее требуется дополнить металлической пластиной. Я вырезал стальной диск толщиной 5 мм с диаметром, равным внешнему диаметру катушки, хотя диаметр может быть и немного меньше (Рисунок 3).
 | |
| Рисунок 3. | К нижней части катушки должна быть прикреплена металлическая пластина. |
Магнит левитирует в узком интервале расстояний, в котором сам не способен примагнититься к пластине, и нуждается в небольшой помощи поля катушки, поддерживающей его в «подвешенном» состоянии.
К металлическому диску крепится датчик Холла, плоская сторона которого должна быть обращена в сторону катушки (Рисунки 4, 5).
 | |
| Рисунок 4. | Эта сторона датчика должна быть обращена к катушке. |
 | |
| Рисунок 5. | Эта сторона датчика должна «смотреть» на магнит. |
Для удобства я установил датчик в пластиковый диск (Рисунок 6), который вырезал из акрилового листа, но можно обойтись и просто клеем или двухсторонним скотчем.
 | |
| Рисунок 6. | Датчик установлен скругленными гранями в сторону магнита. |
Очень важно установить датчик по центру катушки и ее металлического сердечника.
Первоначально я пытался считывать сигнал датчика Холла и управлять катушкой через транзистор с помощью системы PICAXE, выпускаемой фирмой Revolution Education на основе микроконтроллера PIC, но PICAXE оказалась слишком медленной. Тогда я решил воспользоваться операционным усилителем (ОУ) LM358, и это дало желаемый результат.
Конструкция получилась очень простой. Я обнаружил, что когда магнит левитирует, схема, в зависимости от веса объекта, потребляет всего 50…150 мА. Но если магнит убрать, управляющий транзистор полностью открывается, средний ток увеличивается, и стабилизатор 5 В начинает перегреваться.
Поэтому схема была переработана (Рисунок 7). Чтобы отключать катушку при отсутствии магнита, я использовал второй операционный усилитель микросхемы LM358.
 | |
| Рисунок 7. | Принципиальная схема устройства. |
Вся схема, включая катушку, питается напряжением 5 В, стабилизированным микросхемой LM7805, максимальный ток которой не должен превышать 0.5 А.
В отсутствие внешнего поля выходное напряжение линейного датчика Холла UGN3503U равно примерно половине напряжения питания 5 В.
Если к датчику поднести магнит, выходное напряжение увеличивается или уменьшается, в зависимости от того, каким полюсом магнит направлен к датчику (северным или южным).
В этой схеме при приближении магнита напряжение должно повышаться, поэтому подносить магнит к датчику нужно южным полюсом.
Выход датчика подключен к инвертирующему входу первого операционного усилителя (ОУ1), на неинвертирующий вход которого подается напряжение с делителя напряжения R1/R2. Подстроечный резистор R2 используется для уравновешивания в точке левитации разных по размерам и весу магнитов и объектов.
Выход ОУ1 через резистор 1 кОм соединен с базой транзистора BD681, управляющего включением катушки. Здесь подойдет практически любой NPN транзистор или MOSFET с допустимым током не менее 1 А.
Второй операционный усилитель микросхемы (ОУ2) используется для слежения за частотой переключения транзистора Q1. Для этого выходное напряжение ОУ1, эффективно сглаженное RC-фильтром R9/С4 (100 кОм/1 мкФ), подается на неинвертирующий вход ОУ2.
На инвертирующий вход ОУ2 поступает напряжение с делителя R7/R8, в одно плечо которого включен подстроечный резистор.
Пока ток катушки, управляемый выходом ОУ1, пульсирует, стремясь удерживать магнит в подвешенном состоянии, аналоговое напряжение на неинвертирующем входе ОУ2 ниже установленного делителем на инвертирующем входе.
Но если убрать магнит, напряжение на этом входе увеличится, поскольку ОУ1 будет пытаться вернуть магнит на место, непрерывно открывая транзистор управления током катушки, колебания прекратятся, и выходное напряжение ОУ1 станет постоянно высоким.
В результате напряжение на неинвертирующем входе ОУ2 превысит напряжение на инвертирующем, и уровень выходного сигнала переключится на высокий. К выходу ОУ2 через резистор 5.1 кОм подключена база NPN транзистора BC337, коллектор которого соединен с базой транзистора BD681, управляющего током катушки. Шунтируя базовый резистор 1 кОм (R3) на землю, Q2 отключает катушку.
Второй транзистор BC337 (Q3), также подключенный к выходу ОУ2, управляет светодиодами, закорачивая на землю токоограничительный резистор R12, когда их надо погасить.
Установка точки отключения катушки легко выполняется вращением движка подстроечного резистора R8 до положения, в котором светодиоды погаснут. Если внести магнит в зону чувствительности датчика, светодиоды зажгутся вновь, ток катушки начнет пульсировать, и далее лишь останется с помощью подстроечного резистора R2 найти точку равновесия магнита.
Теперь, после того, как все ошибки схемы были устранены, имея несколько простых компонентов, ее очень легко повторить.
 | |
| Рисунок 8. | Вид печатной платы со стороны элементов. |
Конструкция печатной платы представлена на Рисунках 8 и 9. Площадки, помеченные «TP», служили тестовыми точками, в которые в процессе отладки я запаивал штырьки для подключения приборов. При повторении схемы их можно не устанавливать.
| Рисунок 9. | Рисунок печатной платы со стороны проводников. |
Несколько советов и замечаний
Выводы катушки должны быть подключены так, чтобы создавать магнитное поле нужного направления. Проверить правильность их присоединения очень просто: если схема не работает, поменяйте местами провода.
Размеры магнита не слишком важны, но он должен быть достаточно сильным. Хорошо подойдет редкоземельный магнит, например, неодимовый.
Во избежание перегрева стабилизатора напряжения, обязательно установите его на радиатор. Выберите источник питания с напряжением 7 … 12 В, поскольку чем выше входное напряжение, тем больше нагревается стабилизатор напряжения 5 В.
Максимально допустимое входное напряжение датчика Холла равно 6 В, поэтому для питания схемы выбрано напряжение 5 В.
Если ваш магнит сильно вибрирует, или вообще не хочет левитировать, это может быть вызвано несколькими причинами, главной из которых является недостаточная толщина металлической пластины на катушке. Попробуйте добавить к ней еще несколько шайб.
Возможно также, что датчик Холла смещен относительно центра катушки, или же зазор, установленный между катушкой и магнитом, слишком мал, и магнит нужно немного опустить регулировкой подстроечного резистора R2. (Это очень тонкая настройка).
А может быть, катушка перекошена и установлена не вертикально.
Добавление мигающих RGB светодиодов сверху и снизу магнита создаст приятный эффект, если вы заставите левитировать какой-либо блестящий объект, такой, например, как шарик из алюминиевой фольги (Рисунки 10 и 11). Поскольку верхний светодиод находится ближе к объекту, желательно расширить угол его излучения, спилив линзу напильником.
| Рисунок 10. | Установка мигающих цветных светодиодов создаст приятный эффект. |
| Рисунок 11. | Интересным левитирующим объектом может стать небольшой пропеллер с магнитом,прикрепленным в его центре. |
Совсем другой эффект можно получить, изготовив небольшой пропеллер с прикрепленным в его центре магнитом. Я вырезал его из банки от Кока-Колы.
Затем поместите под пропеллером плоскую свечку-таблетку или ароматическую масляную горелку, и поднимающийся поток теплого воздуха заставит левитирующий пропеллер вращаться.
Для вращения пропеллера требуется совсем небольшая разница температур, и если воздух в помещении холодный, будет вполне достаточно тепла, выделяемого катушкой. Конечно же, если воздух теплый, это работать не будет.
В устройстве можно использовать катушку от ненужного соленоида, но предварительно необходимо убедиться в том, что потребляемый ею ток не перегрузит схему, поскольку многие соленоиды очень прожорливы.
Материалы по теме
Левитрон на датчике Холла Собрать своими руками — 19 Января 2014 — Лаборатория самодельщика
Самым распространенным видом левитрона является левитрон на постоянных магнитах:
Тут все просто: магнитное поле постоянных магнитов удерживает волчек в воздухе.
Но мне было интереснее собрать левитрон на электромагните и датчике Холла. Приступим!
/откуда был взят материал, я уже не помню. остался только этот pdf файл: http://vk.com/doc38247024_223399501/
Принцип работы: В данной схеме сила притяжения генерируется между электромагнитом и постоянным магнитом. Равновесное положение не
стабильно, и поэтому используется система автоматического контроля и
управления. Датчиком контроля служит магнитоуправляемый датчик положения на основе эффекта Холла MD1. Он расположен в центре торца катушки и закреплен. Катушка намотана лакированной проволокой 0,35-04 мм, и имеет около 550 витков. Светодиод НL1 показывает своим свечением, что схема работает. Диод D1 обеспечивает быстродействие работы катушки.
Схема работает следующим образом. При включении ток идет через
катушку, которая создает магнитное поле и притягивает магнит. Для того чтобы
магнит не перевернулся, его стабилизируют, прикрепив к нему что нибудь снизу. Магнит взлетает и притягивается к электромагниту, но когда магнит попадает в зону действия датчика положения (МD1) он своим магнитным полем отключает его.
Датчик в свою очередь подает сигнал на транзистор, который отключает электромагнит. Магнит падает. Выйдя из зоны чувствительности датчика, электромагнит снова включается и магнит опять притягивается к электромагниту.
Таким образом, система непрерывно колеблется около некоторой точки.

- Для сборки нам понадобится:
- 1) резисторы 270Ом и 1кОм (0.125Вт)
- 2) транзистор IRF 740
- 3) светодиод
- 4) диод 1N4007
5) датчик Холла AH443
6) макетная плата
7) лакированная проволока 0.35-0.4мм
+ корпус, паяльник и т.п.
Собираем катушку. Каркас можно сделать используя тонкий лист стеклотекстолита и старый фломастер.

- Вырезаем: (примерный размер катушки: высота — 22мм, диаметр — 27мм)
- Клеим:



Наматываем примерно 550витков: (лакированная проволока 0.35-0.4мм, в навал, но более-менее равномерно)



Паяем плату управления: (в качестве разъема питания я использовал обычный 3.5 mm miniJack)

- Цоколевка:
- Для удобства сборки можно использовать штырьковые разъемы:

В корпусе вырезаем все необходимые отверстия:
Устанавливаем все на свое место:
Теперь необходимо сделать крепление для катушки:
Отрезаем все лишнее. Сверлим крепежные отверстия.
Подготавливаем датчик: (сгибаем его именно так, как на фото)
Припаиваем и изолируем провода.
Достаем магнит из детского магнитного конструктора:
После того, как достанем магнит, нужно определить какой стороной его ориентировать к электромагниту. Для этого помещаем и временно закрепляем датчик Холла в самом низу катушки.
Включаем левитрон (должен загореться светодиод) и подносим магнит.
Если он притягивается к катушке — то магнит ориентирован правильно, но если же магнитное поле катушки выталкивает его, то магнит необходимо перевернуть.
Снизу магнита необходимо прикрепить что-то легкое. В моем случае это светодиод.
Перемещая датчик Холла добиваемся стабильного зависания на максимальном расстоянии от катушки. Закрепляем его.
На этом сборка и настройка левитрона завершена. Можно любоваться получившимся устройством:
КТ315Л (левитрон эдишн) 🙂
- Скоро видео.
- Видео пробного левитрона:
- Спасибо за внимание.
Левитирующий ночник
Собрал левитрон на катушках индуктивности и датчике холла. Обеспечил возможность медленного вращения и подсветки без батарей и проводов. Интересно?

Нетрудно заставить левитировать объект в воздухе с помощью небольшой катушки, датчика холла и Arduino с очень простой программой. Куда сложнее заставить ее устойчиво держать равновесие. В большинстве случаев появляются колебания которые очень скоро усиливаются и гравитация побеждает.
Катушка индуктивности во время работы создает достаточно сильные помехи и дает ошибочные наводки на датчик холла. Что бы отфильтровать такие помехи необходимо в код добавлять дополнительные методы фильтрации. Но Arduino не распологает достаточными мощностями, что бы обеспечить фильтрацию в полном объеме и по тому приходится добавлять механический демпфер.
Для борки установки нам потребуется:
- arduino
- неодимовые магниты
- проволока для катушки 0.4мм — 20 метров
- болт с гайкой и шайбами (сердечник катушки)
- датчик холла
- светодиоды
- силовой транзистор Toshiba 2SC1815 или какой-нибудь хороший мосфет
- резисторы 1 к
- конденсатор 0.1 мКф
- блок питания 5-12 вольт
- два металлических кронштейна
- пластиковый полупрозрачный шар
- небольшой куллер для придания вращения нашему шару

Распиновка для подключения датчика холла и силового транзистора к arduino:

В первую очередь нам понадобится намотать 20 метров проволоки на наш блот. Тем самым получим соленоид, который будет удерживать наш шар в воздухе.
После намотки к торцу соленоида нужно прикрепить датчик холла.
Простейший код для управления магнитом:
void setup () <
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
>
void loop () <
if ( analogRead(0) > 200 ) < //Adjust the threshold value to levitate.
digitalWrite( 10, HIGH );
digitalWrite( 11, LOW );
> else <
digitalWrite( 10, LOW );
digitalWrite( 11, HIGH );
>
При изготовлении соленоида заметил, что болт с шестигранной головкой в качестве сердечника катушки не создавал однородного магнитного поля вне катушки. Поэтому я скруглил грани болта напильником. Сила удержания заметно выросла.

На этом этапе катушка для левитации устанавливается в жесткую раму. Было бы лучше использовать в раме не магнитные материалы, чтобы избежать проблем. Следует отметить, что материалы из нержавеющей стали, которые я использую, менее магнитны чем железо.
Когда катушка была установлена в раме, левитирующий шар под катушкой начал колебаться в воздухе и падал на пол или приклеивался к катушке. Когда катушка удерживалась в руках то рука сглаживала вибрации и левитация была стабильнее.
Сначала я попробовал добавить программный фильтр, но оказалось это сложнее, чем я думал.
int x, y;
int recX1, recX2;
const int cp = 192; //Adjust the value of cp, kA or kB to levitate.
const int kA = 87;
const int kB = 55;
void setup () <
TCCR1B &= B11111000;
TCCR1B |= B00000001;
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
>
void loop () <
recX2 = recX1;
recX1 = x;
x = analogRead(0);
y = min( max( (x-cp)*kA + (2*x-recX1-recX2)*kB, -255), 255 );
if ( y > 0 ) <
analogWrite( 9, y );
PORTB |= _BV(2);
PORTB &=
_BV(3);
> else <
analogWrite( 9, -y );
PORTB |= _BV(3);
PORTB &=
Для придания вращения в начале хотел сделать вторую катушку, но все таки решил сделать все проще — поставил куллер, который потоком воздуха обдувал сферу и заставлял ее медленно вращаться.
Теперь остается решить последнюю задачу — заставить сферу светиться. Т.к. мы уже имеем генератор переменного магнитного поля от нашего соленоида, то мы можем его индуцировать в электрический ток внутри сферы. Намотку второй катушки производил опытным путем. Катушка закреплена термоклеем возле подвесного магнита.


В более поздних версиях добавил отдельную катушку и генератор колебаний что бы добиться более яркого свечения диодов в сфере.
Левитрон самодельный
Левитрон позволяет осуществлять магнитную подвеску объектов с небольшим весом путем управления магнитным полем, создаваемым катушкой L1. Обратная связь происходит с помощью датчика Холла, выпаянного со старого 3,5″ дисковода (от дискет). Под воздействием внешнего магнитного поля на клеммах H+ и H- возникает разность потенциалов в зависимости от направления поля и его положения.
Схема электрическая левитрона с датчиком Холла

Датчики Холла такого типа довольно низкого качества, но их вполне достаточно для этого применения. Некоторые используют дорогие ратиометрические датчики, но они дороги и довольно труднодоступны.
Датчик, который использован тут, является линейным устройством, но его легко спутать с цифровыми, что также часто стоят на дисководах.
Чтобы избежать ошибки, проверьте его с помощью обычного мультиметра или осциллографа.

Катушка левитрона представляет собой спиральную проволоку диаметром 0,4 мм на сердечнике — винт с поперечным сечением около 1 см кв. и длиной около 5 см. Под ним установлен датчик.
Хорошей идеей является защита его пластиком, который не был бы поврежден неодимовым магнитом, если его случайно ударить об сердечник катушки. Объект, подвешенный под катушкой, должен быть снабжен неодимовым магнитом.
Например цилиндрический магнит с поперечным сечением 15 мм и длиной 20 мм.
Для правильной работы устройства полярность катушки и магнита должны быть выбраны соответствующим образом. Это легко сделать с помощью простого компаса. Магнит должен быть направлен к Земле полюсом «S». Приведенная в действие катушка также должна смотреть на Землю с южным полюсом. Таким образом, катушка будет тянуть магнит, когда он находится в пределах своего магнитного поля.
Схема также содержит элементы, защищающие катушку и полевой транзистор от сгорания, когда объект прилипает к сердечнику или выпадает из поля. В этом случае схема управления катушкой закрыта, и ток там не течет. Итого:
- катушка точно и симметрично намотана,
- датчик расположен точно в центре сердечника,
- почти весь вес шара находится намного ниже магнита,
- катушка ориентирована точно вертикально.
Графики сигналов в контрольных точках

- Uh+: напряжение на положительном выходе галлотрона,
- Ua: напряжение на выходе повторителя A,
- Ub: напряжение на выходе инвертирующего усилителя B,
- Uc: напряжение на выходе триггера Шмидта C,
- Ud: напряжение, управляемое полевым транзистором.
Что касается потребления тока, измерения цифровым мультиметром показали значение ниже 100 мА (рост при увеличении веса). Чтобы увеличить грузоподъемность, катушки также должны быть увеличены, как и поперечное сечение сердечника и / или его магнитная проницаемость. Можно попытаться использовать ферритовое, но такие сердечники имеют значение частот выше 100 кГц.

Транзистор имеет постоянный ток 7 А и сопротивление канала 30 мОм. В результате он вообще не нагревается. Однако вы можете поднять напряжение, управляющее затвором транзистора, чтобы уменьшить это сопротивление, что, в свою очередь, уменьшит потери тепла в транзисторе.
На самом деле, расстояние от левитирующего объекта зависит от силы электромагнита. Это означает, что чем больше произведение тока катушки и количества витков катушек, тем больше напряженность магнитного поля, создаваемого катушкой.
Но это еще не все. Кроме того, на расстояние также влияет проницаемость и площадь поперечного сечения сердечника, чувствительность и динамический диапазон датчика Холла, размер неодимового магнит (интенсивность магнитного поля).
Форум по устройствам магнитной левитации
Обсудить статью Левитрон самодельный
Левитрон на датчике Холла и полевом транзисторе своими руками
левитрон на датчике холла схема
Простейшее устройство для демонстрации левитации магнита-левитрон.Собран на основе датчика Холла SS441A,стоит такой датчик около 150 рублей.
левитрон своими руками
Принцип действия такой:при подаче напряжения питания,ток идет через катушку-электромагнит, создающий магнитное поле,к которому притягивается маленький постоянный магнит.Но между электромагнитом и постоянным магнитом находится датчик Холла.
Когда постоянный магнит попадает в зону действия датчика Холла,то датчик блокирует работу полевого транзистора и электромагнит отключается,при этом постоянный магнит падает вниз.Как только поле постоянного магнита исчезает из зоны действия датчика Холла,вновь включается электромагнит и снова притягивает его к себе.
Эти все падения и притяжения повторяются несколько десятков или сотен раз в секунду,это не видно и кажется,что магнит висит в воздухе неподвижно.
как сделать левитрон на датчике холла
Катушка электромагнита намотана на каркасе диаметром 8мм,содержит примерно 500 витков провода диаметром 0.4-0.5мм.Внутрь катушки вставлен болт-сердечник.
Датчик Холла находится на некотором расстоянии снизу от сердечника,это подбирается экспериментально.Ток потребления без постоянного магнита-1.
5А,при приближении магнита к датчику,ток падает до 40мА,рабочий ток-примерно 400мА,это ток при левитации.
левитрон своими руками как сделать левитрон
Для стабилизации левитации,снизу магнита приклеить кусочек бумаги,иначе магнит сможет перевернуться.Магнит должен парить в воздухе неподвижно,без колебаний.Катушка будет нагреваться при токе 1.
5А,так что этого режима без магнита надо избегать.Полевой транзистор любой,с наименьшим Rds,типа irf3205,irfz44 и т.д.Диод служит для гашения напряжения ЭДС катушки при выключении ключа.
Подойдет любой выпрямительный,на напряжение 400В и выше.
Источник



