
- Как cделать орнитоптер своими руками
- Видеообзор
- 1. Выбор начальных параметров размаха крыльев, веса и частоты взмахов.
- 2. Выбор Махательного Механизма
- 3. Выбор компонентов. Мотор, ESC и Aккумулятор.
- Выбор мотора
- Источник питания
- Регулятор оборотов (ESC)
- Как собрать робота самостоятельно в домашних условиях: от простого к сложному
- Робот, реагирующий на источник света
- Необходимые инструменты и детали
- Процесс сборки
- Робот, различающий препятствия
- Инструменты и запчасти
- Работа с платой
- Управление двигателями
- Установка датчиков препятствий
- Прошивка робота
- Роботы для детей
- Полезные роботизированные устройства для начинающих
- Необходимые навыки
Как cделать орнитоптер своими руками

Эта инструкция — история о том, как я сделал прототип орнитоптера.
Для тех, кто не знает, орнитоптер — это механизм, который летает за счёт взмахов крыльями, как настоящая птица. Идея состояла в том, чтобы создать орнитоптер с нуля, управлять им дистанционно и, конечно, заставить его летать.
Пожалуйста, не судите строго — я не профессионал авиамоделирования. Так что не всё работает так, как мне бы хотелось, но всё же работает.
Реальный результат можно увидеть в многосерийном видео на нашем канале Youtube. Если вам понравится это руководство, пожалуйста, подпишитесь на канал.
Инструкция со временем будет исправляться и улучшаться новыми материалами, как и Орнитоптер.
Видеообзор
1. Выбор начальных параметров размаха крыльев, веса и частоты взмахов.
С какой частотой птицы обычно машут крыльями?
Это зависит от площади крыла самой птицы. Например, для аиста достаточно махать крыльями с частотой 2 взмаха в секунду, воробей должен делать 13 взмахов в секунду, а колибри — до 80. Я хотел сделать большой орнитоптер, поэтому площадь крыла тоже будет большой. Для расчета площади крыла нужно знать размах крыльев. Итак, размах крыльев стал первым выбранным параметром. Я решил сделать орнитоптер с размахом крыльев в диапазоне 1200-1400 мм.
Я искал в интернете существующие конструкции орнитоптеров и анализировал их размеры. Большинство орнитоптеров сделаны в строке определенного размера. Орнитоптеры Hobbie могут быть отсортированы по размаху крыльев (от 660 до 3000 мм) и весу в полете. Мой орнитоптер с размахом крыльев 1200-1400 мм будет где-то посередине этой шкалы, не большой, но и не маленький.
Я искал информацию о конструкции на форумах авиамоделирования, в спецификациях об орнитоптерах и во множестве видео на Youtube. Я выяснил, что орнитоптеры с таким размахом крыльев должны выполнять от 5 до 7 взмахов в секунду и иметь полетный вес в диапазоне от 300 до 500 г. Я выбрал среднее значение веса полета — 400 г. Поскольку у меня нет опыта в создании самолетов и махалетов, я выбрал все значения эмпирически и в основном надеялся на удачу.
Зная приблизительную частоту взмахов (от 5 до 7 Гц), я могу разработать механизм взмахов.
В итоге для орнитоптера мною были выбранны следующие параметры:
2. Выбор Махательного Механизма
Махательный Механизм является наиболее важной частью орнитоптера. Он преобразует электроэнергию от батареи в махательное движение крыльев. Разработать и собрать такой механизм достаточно сложная задача,так как он должен выдерживать огромные усилия, которые меняют направление несколько раз в секунду, и в то же время быть чрезвычайно легким и долговечным.
Существует большое количество махательных механизмов. Вот самые используемые.

Кривошип (Staggered Crank)
Конструкция кривошипа является самой базовой среди махательных механизмов. Части ступенчатого вала находятся на необходимиом растоянии и под необходимым углом для достижения симметричного взмаха. Это часто используемая конструкция среди любителей, которые собирают орнитоптеров из подручных материалаов.

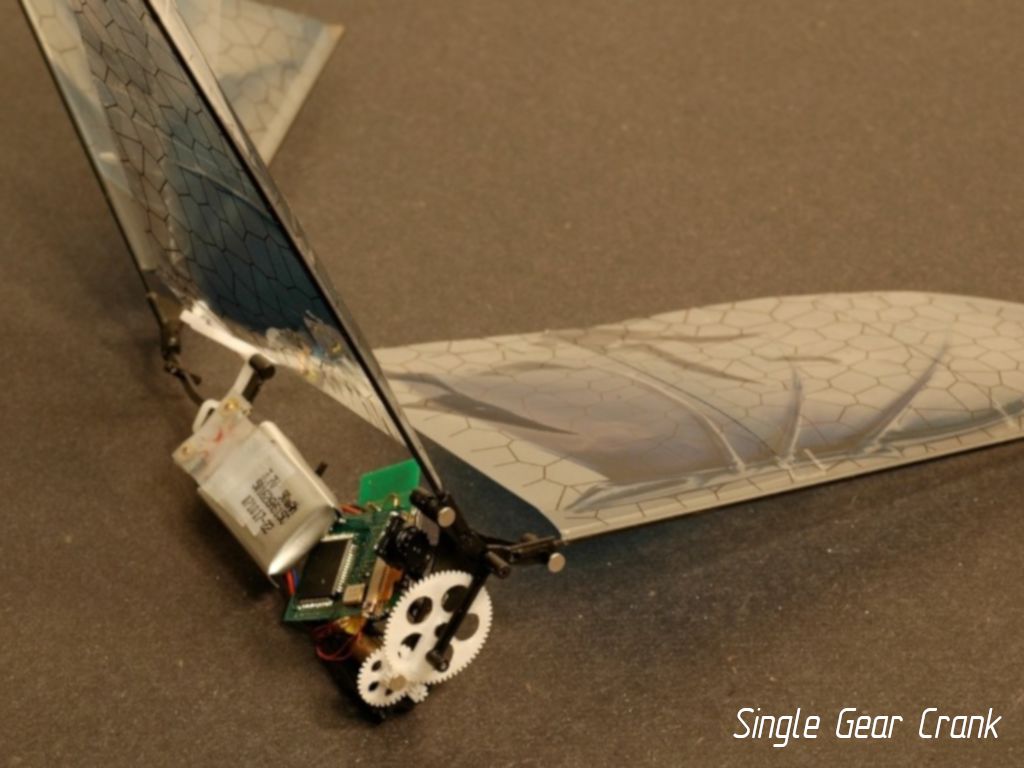
Кривошип с одной передачей (Single Gear Crank)
Несмотря на то что конструкция кривошипа с одной передачей выглядит простой, она сложнее, чем кажется. Центральная точка, где соединительный стержень и шарниры крыльев соединены друг с другом, должна расширяться и сжиматься при закрывании механизма. Сжатие и расширение с очень высокой частотой может привести к износу компонента.
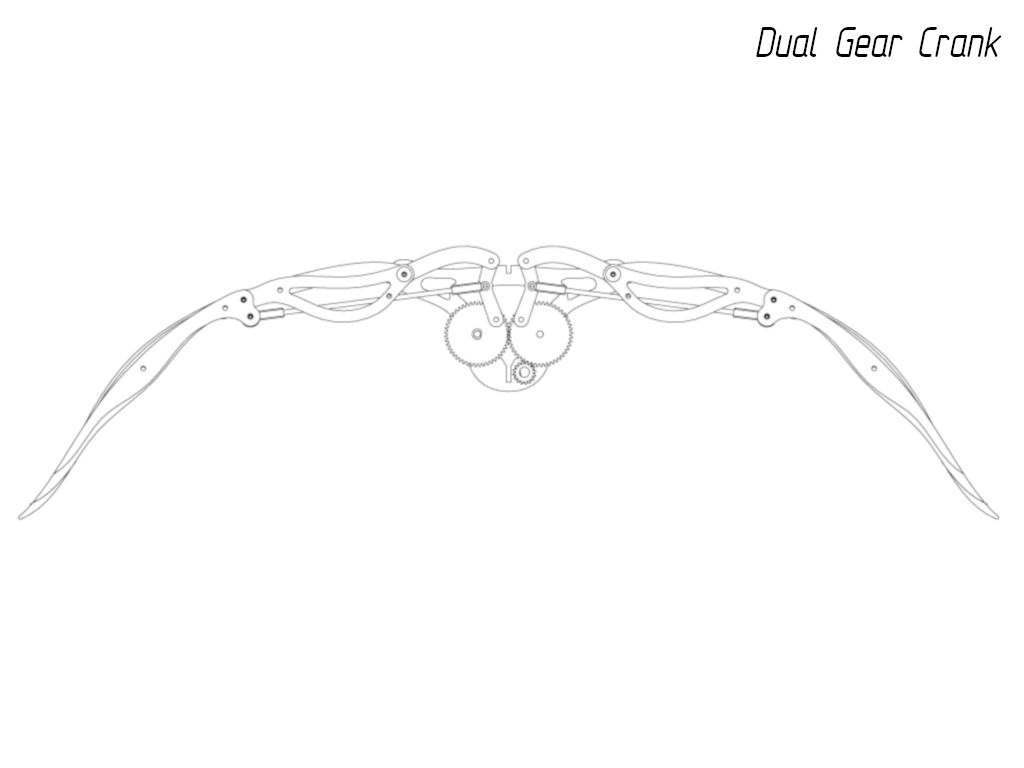
Кривошип с дмумя передачами (Dual Gear Crank)
Эта конструкция имеет две шестерни, которые управляют петлями каждого крыла по отдельности. Существует несколько вариантов конструкции трансмиссии. Шестерня может приводить в движение обе вспомогательные передачи. Таким образом, вторичные шестерни будут вращаться в одном направлении друг с другом. В другой конструкции ведущая шестерня вращает вторичную шестерню, а эта вторичная шестерня вращает другую вторичную шестерню. Вторичные передачи будут вращаться против часовой стрелки друг к другу. Эта конструкция намного проще в реализации и уменьшает несоосность крыла.


Поперечный вал (Transverse Shaft)
Поперечная конструкция вала является еще одним вариантом кривошипно-шатунного механизма. Эта конструкция обеспечивает максимально симметричный взмах. Однако это самый тяжелый и сложный дизайн. Вращающиеся зубчатые колеса и крылья находятся не в одной плоскости, поэтому соединительный стержень должен вращаться. Стержень соединителя имеет шариковый подшипник внутри, и это добавляет вес только к самому компоненту. Количество зубчатых колес, используемых в этой конструкции, больше, чем в любой другой конструкции. Конструкция поперечного вала обычно используется для больших орнитоптеров, где вес можно преодолеть с помощью больших крыльев.

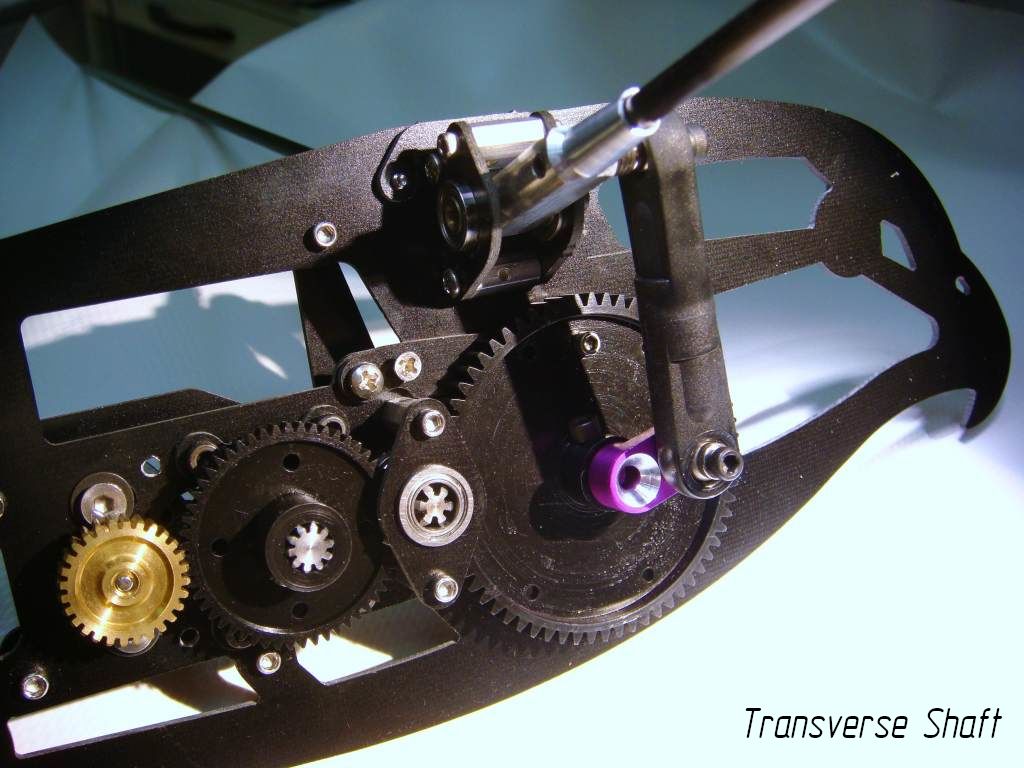
Я решил выбрать конструкцию с поперечным валом. Размер моего орнитоптера позволяет использовать дополнительную массу механизма. Кроме того, такую конструкцию легко изготовить из листового материала, так как плоскости зубчатых колес параллельны плоскости корпуса.
3. Выбор компонентов. Мотор, ESC и Aккумулятор.
Выбор мотора
Мотор должен быть небольшого размера. Моторы большого размера имеют большой вес, что очень критично для конструкции. В то же время электродвигатель должен быть прочным, чтобы обеспечить достаточный крутящий момент для преодоления сопротивления воздуха.
Для увеличения крутящего момента и достижения необходимой частоты взмахов я собираюсь использовать редуктор. В этом случае я могу взять более слабый двигатель с более высоким числом оборотов в минуту (об / мин).
Принимая во внимание размеры орнитоптера, хобби электромоторы размером 300 — 400 должны идеально подходить. Хобби-моторы такого размера могут быть коллекторными или бесколлекторными. В основном вы можете найти их в средних RC катерах и вертолетах.
Я выбрал этот мотор:
Его можно заменить на:

Обратите внимание на важную деталь. Вам нужен аутраннер. Монтажные отверстия двигателя должны быть на одной стороне с выходным валом. Таким образом, корпус, который находится рядом с выходным валом, должен быть неподвижным.
Основные характеристики двигателя:
Краткое объяснение названия:
Первые, 4 цифры в описании (2627) — это размеры двигателя. Первая пара цифр показывает диаметр двигателя (26 мм), а вторая пара показывает длину (27 мм). Значение «кВ» относится к постоянной скорости двигателя. Он измеряется числом оборотов в минуту (об / мин), которое совершает двигатель, когда на него подается 1 В (один вольт) без нагрузки. Например: Этот 2627 4200 кВ бесколлекторник может быть запитан батареей 2S (7.4В) или 3S (11.1В). При значении 4200 кВ и без нагрузки этот двигатель имеет следующие скорости:
Источник питания
В моем орнитоптере батарея — это один из самых тяжелых компонентов, поэтому очень важно выбрать правильную.
Для питания двигателя я использую Li-Po аккумулятор. Коэффициент отношения емкости к массе у таких аккумуляторов достаточно высок. Кроме того, они способны выдавать высокое значение тока, которое требуется для бесколлекторных двигателей.
Существует заметная разница в весе между 2-х и 3-х ячеечными батареями одинаковой емкости. Поэтому я думаю, что лучше использовать 2-ячеечную батарею.

Основные характеристики батареи:
Довайте проверим, достаточно ли максимального тока батареи.
Умножив скорость разряда на емкость, можно рассчитать максимальное значение тока, которое может выдавать аккумулятор:
30C * 0,9Ah = 27 Amp.
Максимальный ток 27 А превышает значение, которое может потреблять двигатель (22 А), поэтому все в порядке. Так же очень важана емкость аккумулятора. Этот параметр влияет на продолжительность полета орнитоптера.
Однако, в моем случае, гораздо важнее выбирать батарею в зависимости от веса.
Регулятор оборотов (ESC)
Для управления и регулирования скорости бесколлекторного мотора нужен контроллер. Любой хобби ESC подходит для этого. Единственное, что нужно проверить — это длительный и пиковый ток. Чтобы уменьшить вес орнитоптера, лучше выбрать контроллер в мини-форме.
Источник
Как собрать робота самостоятельно в домашних условиях: от простого к сложному
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Первоначально запаивают датчики с учетом полярности подсоединения фотодиодов и фототранзисторов. Их размещают по углам платы с одного края, располагая так, чтобы они смотрели в разные стороны. Это передняя часть робота, его «глаза».
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
- вывод Reset, подтянутый резистором к «плюсу» источника питания;
- электролит на 1000 мкФ для защиты от скачков напряжения;
- кварцевый резонатор и конденсаторы, которые нужно располагать вблизи от выводов Xtal1 и Xtal2.

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
- со знакомства с наборами для конструирования и программирования Lego BOOST (7-12 лет) и Lego EV3 (с 10 лет);
- с конструирования вибророботов, предназначенных для детских игр;
- с занятий с использованием электронных конструкторов «Знаток»;
- со сборки простых конструкторов для начинающих на основе Arduino;
- с конструирования моделей, представленных обучающими конструкторами Engino.
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Источник



