
Магнитный «летающий» глобус

Искал подарок на день рождения и вот на что наткнулся. Очень забавное и одновременно интересное исполнение обычного глобуса — уменьшенной, упрощенной модельки нашей с вами Земли-матушки.
Подробное описание под катом.
Гаджет Magnetic Levitating World Globe.
Как заявляет производитель:
Это превосходная модель Земли, позволяющая глобально осмотреть некий символ нашей планеты.
Сам девайс состоит из, собственно, миниатюрного глобуса и подставки с подсветкой (То есть даже ночью Вы можете любоваться родной Землёй)
Глобус с помощью системы двух магнитов зависает в воздухе, а подсветка из синих светодиодов создает абсолютно космические впечатления.
В комплекте поставляется: сам шарик глобуса, подставка, инструкция =), адаптер питания (для магнитов и подсветки), ложечка(видимо, чтобы поднимать Землю.)
Фото: 
На мой взгляд, основное его преимущество перед обычными «большими» глобусами в том, что во-первых он миниатюрен, но на нём всё можно разглядеть, а во-вторых, по сути, мы можем наблюдать за планетой практически в космосе, даже совершать с ней круговращательные движения.
Считаю, что для рабочего стола очень стильная штучка.
Update: spiritus_sancti сказал, что можно сделать всё и своими руками (читаем тут). И можно не только глобус так «подвесить». 😉
Источник
Левитирующий в магнитном поле глобус

В этой статье мастер-самодельщик из Бельгии продемонстрирует нам свою работу — глобус, который «плавает» или левитирует в воздухе.
На фото, позади глобуса, видна белая вертикальная деталь напоминающая стойку. Может, создастся впечатление, что именно на этой детали он и держится. На самом деле это просто провод соединяющий верхнюю и нижнюю части устройства, а глобус действительно парит в воздухе без каких либо опор.
В принципе, руководствуясь данной статьей можно заставить левитиовать любой подходящий предмет. Выбор мастером глобуса носит чисто эстетическое значение.
Для наглядности давайте посмотрим небольшой демонстрационный ролик.
Шаг первый: принцип магнитной левитации
Один из способов достичь эффекта магнитной левитации — это расположить электромагнит над объектом — в данном случае земным шаром, — который содержит очень сильный магнит. Постоянно измеряя вертикальное положение объекта, можно изменять магнитную силу, прилагаемую электромагнитом к магниту объекта, чтобы удерживать его на месте.
Это происходит примерно так же, как вождение автомобиля. Постоянно анализируя, смещается ли автомобиль влево или вправо, водитель может оставаться на своей полосе движения, лишь внося небольшие поправки.
Эта система управления магнитной левитацией не является «линейной» системой. Например, соотношение между током, приложенным к электромагниту, и силой, действующей (на магнит земного шара), является квадратичным. Более того, эта сила меняется в зависимости от расстояния между электромагнитом и магнитом.
Любое изменение веса земного шара, магнита, электромагнита или положения датчика, вероятно, приведет к «нестабильному» глобусу.
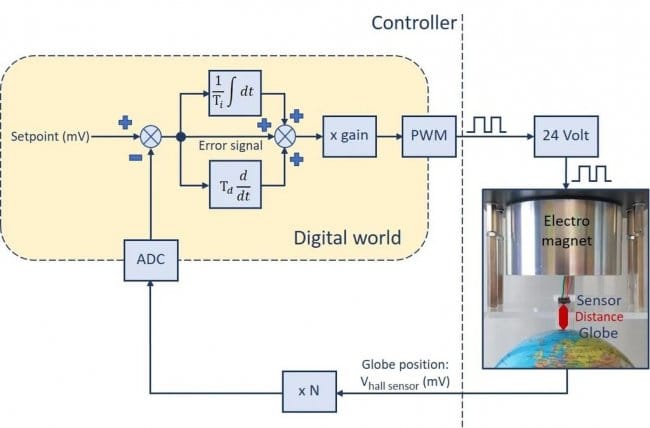
Итак, как это работает? Во-первых, нужно определить вертикальное положение земного шара. Это положение измеряется датчиком на эффекте Холла. Небольшим устройством, которое измеряет силу магнитного поля (создаваемого магнитом, установленным внутри земного шара), преобразуя его в электрическое напряжение. Если глобус приблизится к датчику, напряженность магнитного поля увеличится, а выходное напряжение изменится. В данном случае из-за расположения северного и южного полюсов магнита и датчика Холла это напряжение будет уменьшаться. Напряжение снова возрастет, если глобус удалится дальше от датчика.
Это напряжение (обычно от 100 мВ до 300 мВ в рабочей точке, в зависимости от настроек) усиливается, прежде чем оно преобразуется в 10-битное число АЦП (аналого-цифровой преобразователь) Arduino. Это усиление является необходимым шагом, учитывая очень небольшие изменения напряжения, которые необходимо уловить (менее милливольта на выходе детектора Холла) и 10-битное разрешение АЦП Arduino.
На следующем шаге программа вычтет это число (представляющее положение, но выраженное в милливольтах — или шагах АЦП) из заданного положения (значения), которое также должно быть выражено в милливольтах или единицах АЦП — и соответствующим образом масштабированы. Вычитание дает отклонение от желаемого положения земного шара. Это называется «сигнал ошибки», потому что он равен нулю, когда нет отклонения.
Коэффициент усиления хранится как константа в программе Arduino.
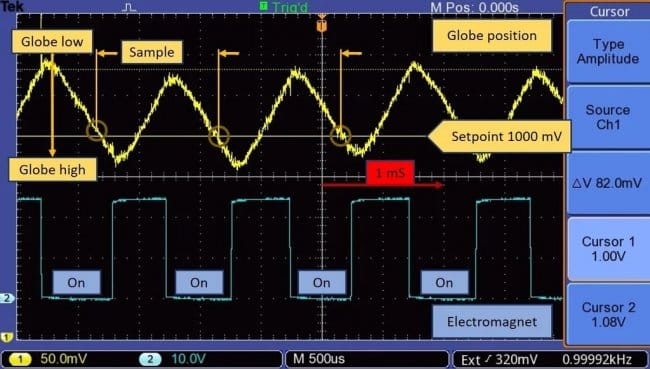
Усиленный сигнал ошибки затем подается на 16-битный таймер Arduino Nano Timer 1 для генерации импульса с определенным рабочим циклом (ШИМ — широтно-импульсная модуляция). Если он равен нулю, то рабочий цикл также будет равен нулю. Если это 999, рабочий цикл будет 100%. Длительность импульса зафиксирована и составляет ровно одну миллисекунду. Это можно увидеть на фото экрана осциллографа. Произведенный импульс будет определять время «ВКЛ» электромагнита в пределах этой единственной миллисекунды. Это увеличит или уменьшит «среднюю» силу, оказываемую электромагнитом на магнит земного шара в течение этой миллисекунды, и в результате положение земного шара изменится.
Весь этот процесс повторяется каждую миллисекунду (выполняется прерывание). Каждый цикл начинается со считывания выходного сигнала АЦП для получения напряжения датчика Холла. Если глобус находится в стабильном плавающем положении, это напряжение будет близко к заданному значению напряжения (в этом примере: около 1000 мВ, что в 10 раз превышает выходной сигнал датчика Холла). Как и в любой системе управления, это напряжение будет немного колебаться.
На фото экрана осциллографа (желтый канал) видно, что каждую миллисекунду земной шар опускается примерно на 500 микросекунд, а затем снова движется вверх к электромагниту.
Дифференциация сигнала ошибки по времени и добавление этого члена к сигналу ошибки обеспечивает более быструю реакцию на быстро меняющиеся положения земного шара. Постоянная времени дифференциатора Τd (которая также является параметром в программе Arduino) контролирует вес этого члена. Это самый важный из всех параметров: его нужно тщательно выбирать, чтобы добиться стабильности.
Если интегрировать оставшийся сигнал ошибки, выходной сигнал контроллера (PWM) будет медленно увеличиваться, положение земного шара приблизится к желаемому положению, сигнал ошибки станет нулевым, и интеграция остановится именно тогда, когда земной шар находится там, где нужно. Постоянная времени интегратора Τi является еще одним параметром в программе Arduino. Это менее критично, чем Τd.
Вывод: здесь важны 4 параметра. Заданное значение, коэффициент усиления, постоянная времени интегрирования и постоянная времени дифференцирования.
Шаг второй: сборка электромагнита
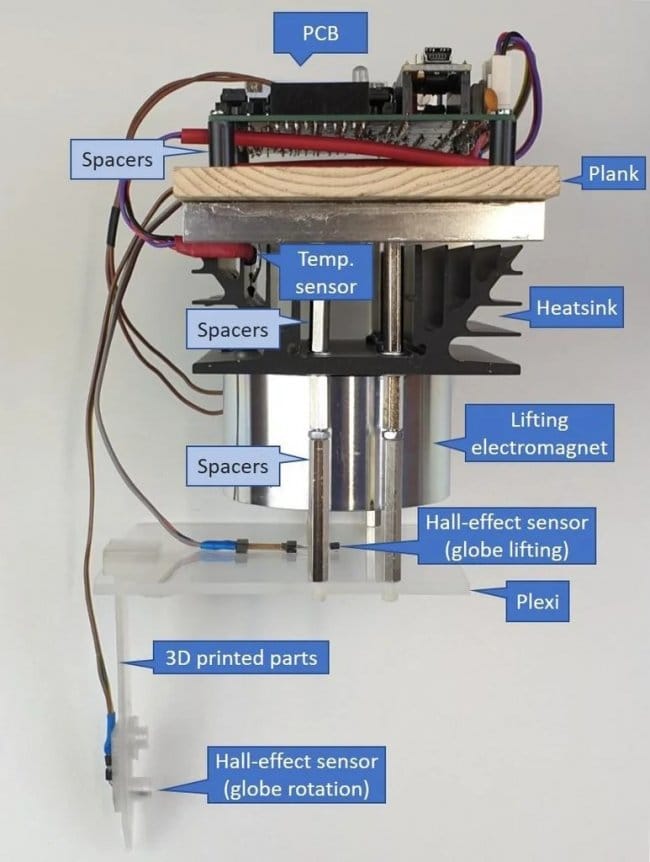
В этой сборке есть все необходимое, кроме катушек, используемых для вращения глобуса, и светодиодных лент.
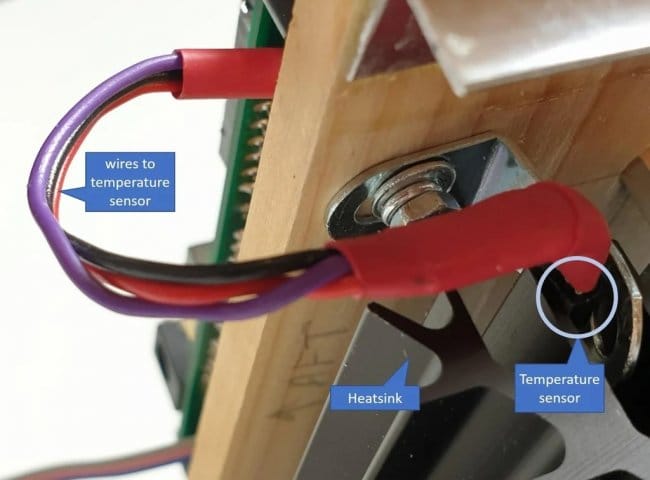
Электромагнит довольно мощный и выделяет изрядное количество тепла. Для безопасности, поверх него помещен довольно большой радиатор. Дополнительно к радиатору крепится датчик температуры. Он будет использоваться для постоянного контроля температуры.
Над радиатором находится деревянная планка (используется для «подвешивания» сборки в деревянном фонаре без использования гаек или болтов). Сразу под ним алюминиевый угловой профиль, который удерживает планку на месте. Резьбовые прокладки соединяют планку с основанием радиатора.
Под радиатором, используя те же отверстия (которые нужно будет просверлить), еще один набор резьбовых прокладок, идущих к пластине из оргстекла, которая удерживает датчик Холла.
Размеры оргстекла 90 х 105 мм. Задний край выступает на 67 мм от положения датчика Холла (центр электромагнита). Обратите внимание, что этот последний размер важен, так как именно здесь 3D-деталь, удерживающая датчик Холла, будет прикреплена к оргстеклу.

Шаг третий: датчик Холла
Существует несколько способов точного измерения расстояния между земным шаром и электромагнитом — точнее, для измерения отклонения между желаемым положением и фактическим положением. Распространенным методом является использование источника света с одной стороны земного шара и светового датчика с другой стороны. Но в данном случае используется датчик на эффекте Холла, измеряющий силу магнитного поля.
Фактически, этот датчик будет контролировать положение земного шара не относительно электромагнита, а относительно самого датчика. Но поскольку этот датчик зафиксирован в своем положении, он в конечном итоге определит положение земного шара относительно электромагнита.
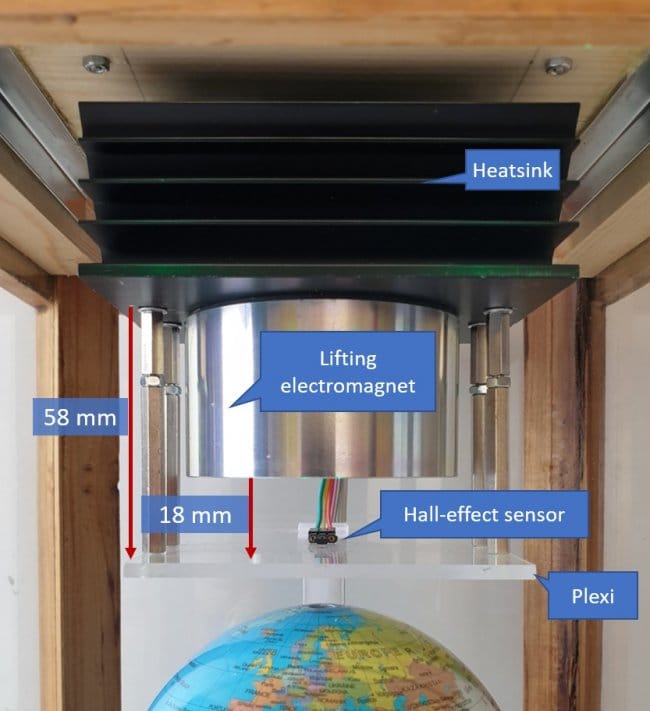
Как было сказано ранее, расстояние по вертикали между электромагнитом и датчиком (или пластиной из оргстекла) имеет решающее значение.
У используемого мастером электромагнита (высота 40 мм) пластина из оргстекла находится на расстоянии 58 мм от радиатора. Это дает «зазор» 18 мм между электромагнитом и датчиком Холла.
Возникает вопрос: не влияет ли магнитное поле электромагнита на показания датчика? В обычных условиях влияет, но пока считываются показания датчика (каждую миллисекунду), электромагнит всегда находится в одном и том же выключенном состоянии.
Этот датчик на эффекте Холла необходимо разместить точно под центральной точкой магнита.
Датчик Холла устанавливается в розетку с контактами и приклеивается к пластине из оргстекла. Это позволяет легко настраивать положение датчика, поскольку выводы датчика не припаяны.

Шаг пятый: глобус
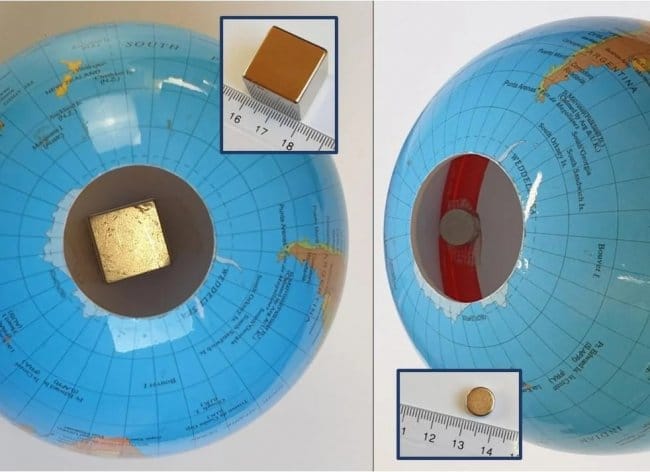
В данной сборке мастер использует глобус-копилку. Это имеет то преимущество, что внизу глобуса имеется большое отверстие. Это отверстие используется для размещения неодимового магнита-куба рядом с географическим Северным полюсом земного шара. Для крепления мастер использовал двусторонний скотч.
Магнит нужно разместить севером вверх. Лучше всего использовать компас для определения северного полюса магнита: северный полюс магнита притягивает южный полюс стрелки компаса.
Для того, чтобы глобус вращался, потребуется размещения двух дополнительных (меньших) магнитов внутри глобуса. Они размещаются на меридиане на противоположных сторонах.
Важно расположит магнит на гринвичском меридиане так, чтобы его северный полюс был направлен вверх, а другой — северным полюсом вниз. Магниты будут генерировать (очень небольшой) крутящий момент, удерживая земной шар во вращении.
Шаг шестой: катушки
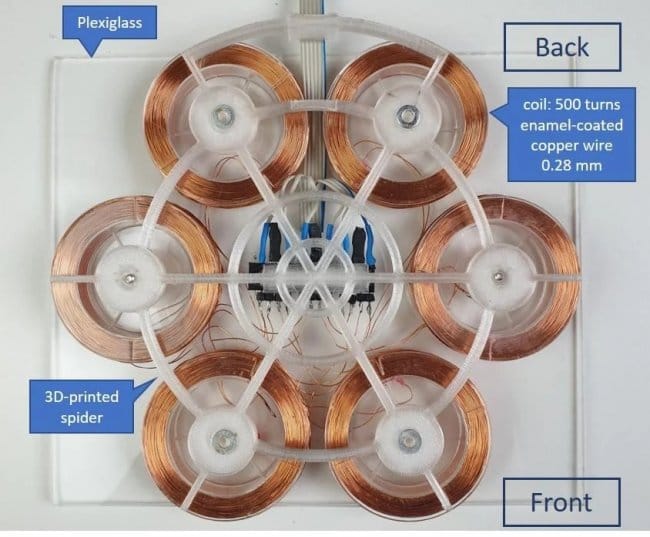
Чтобы создать вращающий момент земного шара, нужно «вращающееся» магнитное поле. Этой цели служат шесть катушек, расположенных под земным шаром.
Эти катушки придется делать самостоятельно, намотав на пластиковые катушки 500 витков эмалированного медного провода (диаметром 0,28 мм). Сопротивление катушек около 20 Ом.
Катушки удерживаются на месте держателем, напечатанным на 3D-принтере. Сам держатель крепится к пластине из оргстекла двумя винтами.
STL-файл паука (необходим для 3D-печати) доступен для просмотра в 3D и загрузки по этой ссылке: 3D-модель держателя Sketchfab (сначала нужно будет создать бесплатную учетную запись).
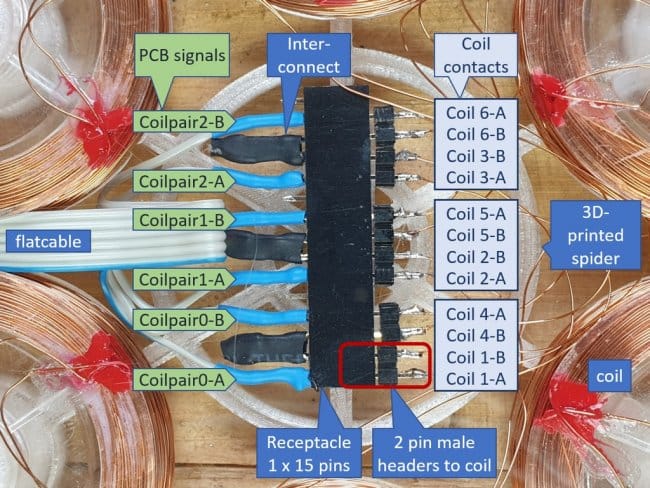
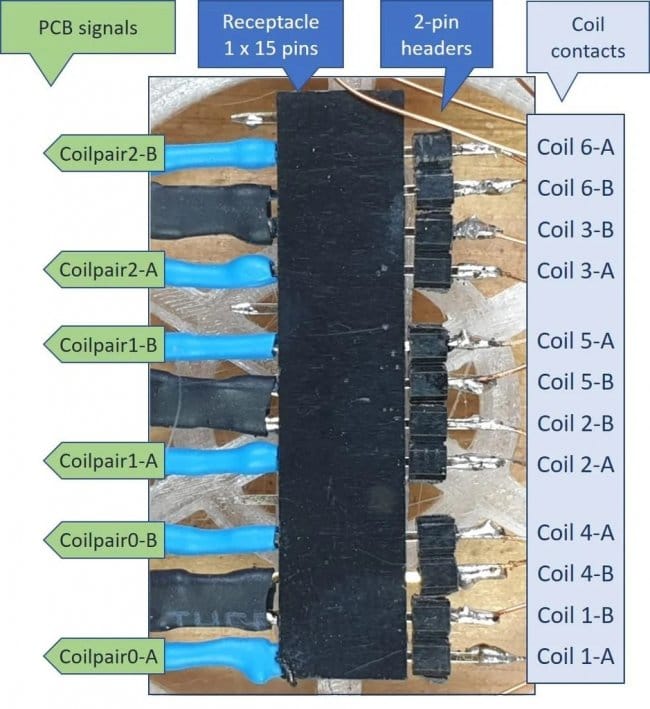
К каждой катушке припаян двухконтактный разъем, все эти разъемы подключены к более крупной 15-контактной розетке (с 3 неиспользуемыми контактами), приклеенной к крестовине прямо посередине.
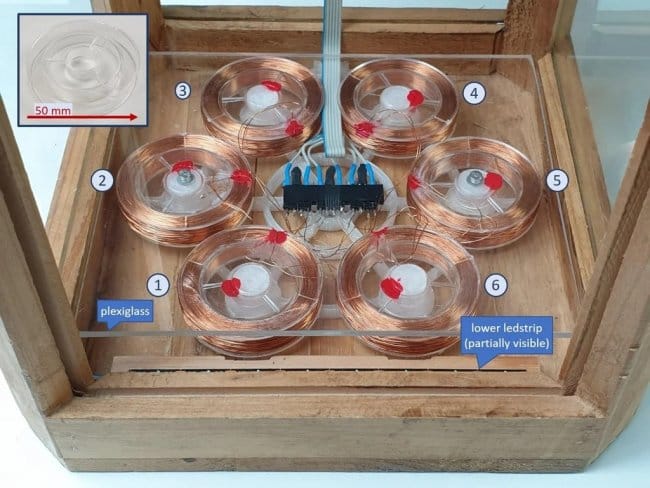
Катушки пронумерованы от 1 до 6 (см. фото), а клеммы катушек обозначены буквами A и B.
Если, смотреть на катушку сверху вниз, направление намотки (от первого до последнего витка) — по часовой стрелке, определяем клемму A как начало первого витка медной обмотки (близко к центру катушки) и клемму B как конец последнего витка медной обмотки.
Если направление намотки против часовой стрелки, то обозначается начало первого витка клеммой B и конец последнего витка клеммой A.
Катушки будут работать вместе в 3 парах: катушка 1 и 4, 2 и 5, 3 и 6. Клеммы «B» катушек просто соединяются между собой для каждой пары катушек. Контакты розетки для клемм катушки «A» припаяны к плоскому кабелю (6 проводов).
На другом конце плоского кабеля припаивается разъем.
Пластину из оргстекла нужно обрезать до нужных размеров, в зависимости от того, какой корпус используется.
Если все правильно подключено, в любой момент вертикальная ориентация магнитного поля трех соседних катушек будет противоположна магнитному полю трех других катушек. Через равные промежутки времени это поле будет «вращаться» на 60 градусов против часовой стрелки (если смотреть на катушки сверху). Это создаст крутящий момент на двух боковых магнитах земного шара.
Для получения лучшего визуального эффекта катушки расположены примерно на 130 см под двумя магнитами вращения шара. Поскольку здесь не нужен большой крутящий момент, даже на таком расстоянии вращение ровное и стабильное.
Шаг седьмой: сборка датчика вращения глобуса
Эта сборка состоит из шести деталей, напечатанных на 3D-принтере. Цель состоит в том, чтобы позиционировать датчик Холла вращения шара таким образом, чтобы он мог улавливать прохождение 2 магнитов вращения глобуса, установленных внутри шара. Держатель позволяет перемещать датчик Холла горизонтально и вертикально. После установки две гайки надежно удерживают датчик Холла на месте.
Сам датчик Холла расположен внутри небольшой трубки на нижнем конце «корпуса датчика Холла». К обратной стороне приклеена розетка с контактом для подключения трех выводов датчика Холла.
Такая конструкция позволяет легко настраивать положение датчика, поскольку выводы датчика не припаяны. Если используется датчик SS 495A, штампованная сторона должна быть обращена вверх.
Установка датчика Холла — простая задача: просто нужно согнуть 3 ножки под углом 90 °, установить датчик в трубку и с помощью пинцета установить ножки в гнезда.
STL-файл сборки датчика вращения земного шара доступен для просмотра и загрузки в 3D по этой ссылке: 3D-модель сборки вращения земного шара Sketchfab .
Шаг восьмой: система управления вращением земного шара
Как уже объяснялось, вращающиеся катушки под земным шаром будут оказывать небольшой крутящий момент на глобус.
В данном случае нужна система управления. Контроллеру необходимо знать скорость вращения земного шара.
Схема вокруг операционных усилителей IC8A и IC8D принимает датчик Холла вращения в качестве входа (осциллограф — синий канал) и обеспечивает импульс (желтый канал), который затем дополнительно формируется триггером Шмитта (IC8C). Выход триггера Шмитта выбирается Arduino Nano и используется в качестве входа контроллера.
Если скорость вращения земного шара в настоящее время слишком мала (ниже желаемой скорости), скорость вращающегося магнитного поля будет установлена на скорость, немного превышающую текущую скорость вращения земного шара (и наоборот). Этот процесс повторяется при каждом полном повороте земного шара, пока скорость вращения земного шара не достигнет заданной.
Описанная здесь система управления будет работать только в том случае, если фаза вращающегося магнитного поля установлена правильно (относительно вращающегося шара). Программа позаботится об этом, но это требует правильного подключения катушек и правильного взаимного расположения катушек в горизонтальной плоскости относительно размещения датчика Холла (см. фото).

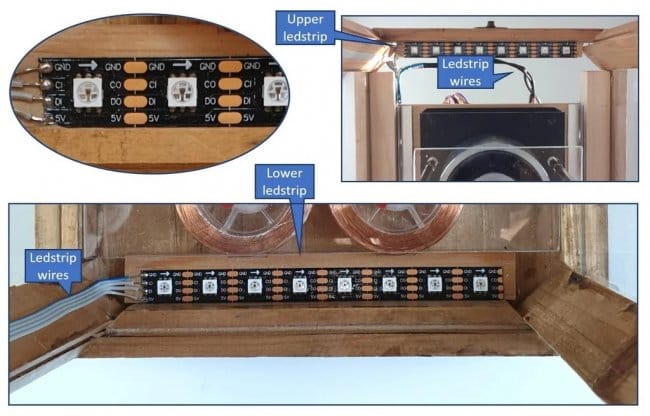
Шаг девятый: светодиодные полосы
Поскольку глобус, плавающий и вращающийся в темноте, не привлекает особого внимания, в качестве последнего штриха добавлены две светодиодные полосы. Каждый светодиод RGB управляется индивидуально, и для этого требуется всего четыре провода: земля, 5 В, данные и часы.
Мастер приклеивает их к корпусу и припаивает 4-проводной плоский кабель достаточной длины к входной стороне каждой светодиодной ленты.
Для сохранения низкого потребления тока будут использоваться только 8 из 16 светодиодов и даже не на полную мощность. Этого вполне достаточно для получения хороших визуальных эффектов.

Шаг десятый: код Arduino
Программа рассчитана на скорость. В частности, процедуры обслуживания прерываний (ISR) не используют числа с плавающей запятой. Это означает, что, например, вычисления контроллера подъема выполняются с (длинными) целыми числами, что повышает точность за счет добавления дополнительных цифр «двоичной дроби» и удаления их в конце расчета (смещение значений влево или вправо на определенное количество бит).
Полный код можно скачать ниже.
20210501 spinning_globe.ino
Основной цикл короткий, но четко показывает общую структуру.
Если событие или пользовательская команда доступны, они будут обработаны. Если нет, программа продолжается. События генерируются подпрограммами обслуживания прерываний. Пользовательские команды собираются из последовательного интерфейса или (опционально) аппаратных кнопок.
Состояния переключателей (чтение и устранение дребезга в ISR) используются для адаптации настроек, если это необходимо.
Данные (если есть) отправляются на последовательный интерфейс и на дополнительный ЖК-дисплей.
Если необходимо изменить яркость светодиодной ленты (на что указывает возникновение определенного события «светодиодная лента»), последовательные данные будут отправлены на светодиодную полосу.
Пока нечего делать, управление будет оставаться в положении холостого хода.
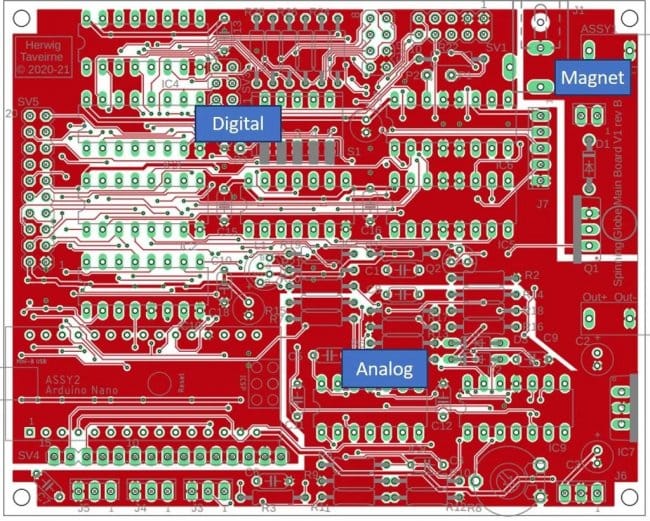
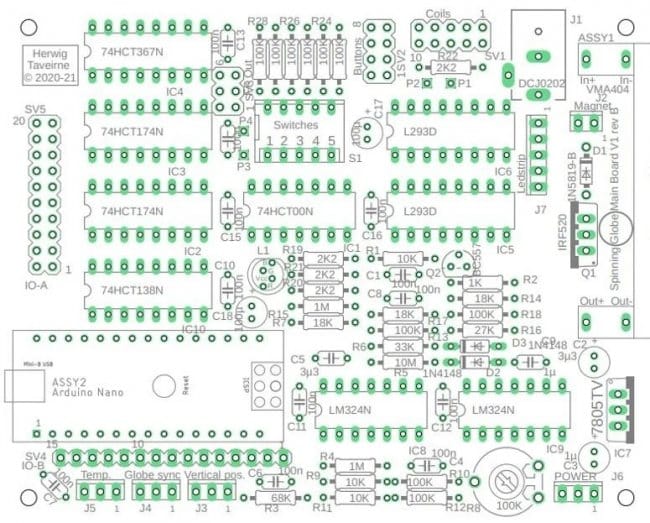
Шаг двенадцатый: размещение компонентов
Печатная плата содержит довольно много компонентов. Спецификацию можно скачать ниже.
5__2021-globe PCB V1 rev B-BOM.txt
Детали четко обозначены на схематическом чертеже. Мастер использовал разъемы IC для всех микросхем. Логические микросхемы 74HCT используются из-за низкого энергопотребления, но микросхемы 74LS тоже будут работать.
Понижающий преобразователь VMA404 устанавливается вертикально, компоненты обращены наружу . Клеммы четко обозначены на основной плате и на плате понижающего преобразователя.
Перед подключением клеммы Out + необходимо настроить подстроечный резистор преобразователя на выходное напряжение 7 В.
Здесь потребуется подключение к трем датчикам (температуры и двум датчикам на эффекте Холла), электромагниту, катушкам и светодиодной ленте. Питание осуществляется от внешнего адаптера питания 24 В, подключенного к разъему постоянного тока на печатной плате. Рекомендуется сначала проверить полярность: на центральный контакт должно подаваться 24 В (+).

Шаг тринадцатый: тестирование и настройка
Тест 1 : проверьте связь (через USB) с последовательным монитором на ПК. Убедитесь, что все DIP-переключатели находятся в положении ВЫКЛ, и убедитесь, что скорость передачи последовательного монитора соответствует скорости передачи, установленной программой Arduino (стандартная 1000000 бод — желательно не изменять). Подключите USB-кабель и убедитесь, что Arduino отвечает сообщением, начинающимся с «Введите + или -, чтобы изменить»..
Настройка : в мониторе последовательного порта введите «A» + ENTER. Arduino отобразит списки параметрыи значений. Убедитесь, что установленное время вращения составляет 12 секунд, а вертикальное положение глобуса установлено на 1000 милливольт.
Тест 2: Подключите датчик температуры (в противном случае плата определит «высокую температуру» и не позволит запитать электромагнит). Подключите также датчик холла подъема и провода электромагнита. Включите устройство. Вы должны увидеть, как мигает зеленый светодиод PCB. Подождите 5 секунд. Синий светодиод на печатной плате должен начать мигать. Теперь медленно переместите глобус (с большим подъемным магнитом) вверх в направлении подъемного датчика Холла (и электромагнита), пока он не коснется пластины из оргстекла. Затем отодвиньте его от датчика вниз. Это включает электромагнит и систему управления подъемом. Поднося снова глобус к магниту, теперь мы должны наблюдать притягивающую силу между электромагнитом и подъемным магнитом. Если мы наблюдаем отталкивающую силу, два провода электромагнита необходимо поменять местами.
Тест 3 : попробуйте «повесить» глобус на место (процедура описана в следующем разделе).
Тест 4 : выключите питание, также подключите датчик Холла вращения и включите питание. Снова повесьте глобус на место и слегка поверните (против часовой стрелки).
Подключите осциллограф к контакту 9 IC8A (вход триггера Шмитта) и убедитесь, что отображаемый сигнал выглядит как желтый сигнал на рисунке, показывающем формирование импульса прохождения гринвичского магнита. Если это не так, попробуйте получить эту форму сигнала, отрегулировав горизонтальное и вертикальное положение датчика Холла вращения.
Настройте выход триггера Шмитта: подключите канал 2 осциллографа к контакту 8 IC8C (выход триггера Шмитта). Регулируя подстроечный резистор R8, установите входное пороговое напряжение (канал осциллографа 1) на 0,8 В. Предположим, мы задали глобусу скорость вращения от 10 до 15 секунд, это должно давать импульс от 0,5 до 1 секунды каждый раз, когда меридиан 180 ° проходит датчик Холла вращения.
Тест 5 : выключите питание, также подключите катушки и включите питание. Снова повесьте глобус на место и слегка поверните (против часовой стрелки). Теперь должна сработать система управления вращением. Примерно через 30 секунд светодиод PCB должен погаснуть, показывая, что заданная скорость вращения достигнута.
Тест 6 : Подключите светодиодные ленты. Затем используйте команды монитора последовательного порта (объясненные в следующем разделе), чтобы установить цикл светодиодной ленты 5 (цикл по всем цветам) и синхронизацию светодиодной ленты 1. Убедитесь, что светодиодные ленты работают правильно.
Источник



