
- Квадрокоптер своими руками
- Как собрать квадрокоптер своими руками
- Какие нужны детали
- Особенности выбора комплектующих
- Аналоги камеры GoPro
- О деталях из Китая
- Инструкция по сборке
- Этапы сборки квадрокоптера
- Установка и настройка оборудования
- Тяжелый FPV-квадрокоптер — разработка, сборка и первый полет
- Разработка
- Сборка
- Первый полет
Квадрокоптер своими руками

Наверное, не стоит лишний раз говорить о том, насколько популярны сейчас квадрокоптеры. И вы, скорее всего, знаете, сколько они стоят, и уже забросили думать об этом. В нашей статье вы узнаете, как сделать квадрокоптер своими руками в домашних условиях. Сразу предупреждаем, что дело это ответственное и непростое, но по итогу у вас будет бесценный опыт и заветный девайс по смешной цене.
Есть несколько способов собрать квадрокоптер своими силами:
- Комплект «Всё включено».
 Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер. - Комплект «Almost Ready to Fly». «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
- Сделать квадрокоптер самим. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
- Использовать подручные материалы. Не менее сложно, но реально. Детали с aliexpress, подручная электроника — никто не говорил, что будет легко. С другой стороны, всё нужное, включая схемы и чертежи, легко находится в интернете.
 Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер.
Идеально подходит для тех, кто хочет сэкономить на покупке готового изделия, но также не хочет разбираться во всех нюансах его сборки. Это посылка с деталями, предварительно настроенными производителем. Вам останется лишь прочесть инструкцию и собрать по ней квадрокоптер. «Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать.
«Почти готовый к полёту» стоит дешевле, однако процесс сборки заметно сложнее. Комплект может быть неполным (в соответствии цена-качество), также вам придётся настраивать изделие самим, что сумеет далеко не каждый. Но если вы уже имеете некий опыт в этой сфере – то стоит попробовать. Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.
Подойдёт далеко не всем. Но если у вас есть опыт, пусть и небольшой – дерзайте. К тому же, это станет вашим поводом для гордости – квадрокоптер, созданный собственными руками. Сложность состоит в том, что придётся подобрать, настроить и подогнать самостоятельно.

Как собрать квадрокоптер своими руками
Предупреждаем, что инструкция обобщена и что могут быть различия в паре моментов. Мы расскажем основное по поводу сборки и выбора деталей.
Какие нужны детали
- Рама и её составляющие. Главное в коптере – несущая часть. Если рама будет легче, то меньше будет уходить питания. Но учтите — лёгкие рамы стоят дороже. Прочность не так важна, если вы не планируете ставить на коптер камеру потяжелее. Рамы бывают трёх типов: четырёхлучевые, шестилучевые и восьмилучевые (по одному мотору на каждый луч).

Особенности выбора комплектующих
- Моторы. Китайские интернет-магазины обычно хитрят и завышают характеристики. Поэтому для надёжности стоит купить моторы мощнее. Также это даст возможность поднимать более тяжёлую камеру. Также существует две разновидности моторов для квадрокоптера — это коллекторные и бесколлекторные
- Пропеллеры. Их цена зависит от цели вашего коптера. Если в ваши планы не входят более сложные «полёты» — пластиковых пропеллеров будет достаточно. Если же планируете аэрофотосъёмку – придётся брать композитные материалы. Чем дороже пропеллеры, тем они крепче и меньше уйдёт времени на балансировку.
- Пульт, приёмник сигнала. Пульт следует брать вместе с приёмником. В таком случае приёмник будет принимать сигнал, посылаемый с пульта. Нормальные пульты, опять-таки, стоят от тысячи рублей и выше – у них радиус действия выше. Сами же пульты могут иметь кучу ненужных переключателей, которые будут вас путать – такие экземпляры лучше не брать.
- Регуляторы оборотов и батарея. Советуем брать сразу комплект двигателей с контроллерами. Можно обойтись и без этого, но тогда настраивать мощность придётся самим. Батарею следует покупать по мощнее, особенно, если хотите ставить более тяжёлую камеру.
- Контроллер. Контроллеры бывают двух типов. Универсальный удобен тем, что работает на дронах любой сборки, этому способствуют датчики и многофункциональность. Недостатком является цена контроллера – от 17 тысяч рублей. Также его придётся настраивать через специальный софт, написанный под конкретную модель. Специализированный контроллер уже имеет необходимые настройки под конкретный тип коптера.
- Камера. Выбор камеры для коптера – дело непростое. Советуем поставить камеру типа GoPro или аналоги от китайских фирм – их качество не сильно разнится. Главную роль играет вес и угол обзора, о последнем расскажем чуть ниже. Чем массивней камера, тем сложнее будет её от центровать. Вы можете рассчитать положение камеры по формуле L= 2 * tg (A /2) х D , (L – область обзора, A – угол, D – расстояние до пропеллеров).




Аналоги камеры GoPro
Экшн-камера Xiaomi Yi

Цена на AliExpress: US $49.99 — 109.99
Технические характеристики:
- Сенсор: CMOS 1/2,3″ 16 мегапикселей;
- Объектив: f/2.8, угол обзора 155 градусов;
- Видео: 1920×1080, 60fps;
- Фото: 4608×3456;
- Вес: 72 грамма;
- Time Lapse: есть;
- Встроенный экран: нет;
- Память: карта памяти microSD.
SJCAM SJ5000X 2K

Цена на AliExpress: $126.58
- Сенсор: CMOS 12 мегапикселей;
- Объектив: f/2.8, угол обзора 170 градусов;
- Видео: 2560×1440, 30fps;
- Фото: 4032×3024;
- Вес: 74 грамма;
- Time Lapse: есть;
- Встроенный экран: есть;
- Память: карта памяти microSD.
О деталях из Китая
Конечно, не стоит недооценивать китайских производителей, но и расхваливать тоже не нужно. Завышенная характеристика их товаров – обычное дело. Брать можно, но только не дешёвые детали, иначе придётся делать всё заново.
Инструкция по сборке
Наверняка, вы прочитали эту статью и взяли раму с платой распределения. Но если вы это не сделали – не беда, просто подключите провода к модулю управления.
Возьмём, к примеру, коптер, собранный из таких комплектующих:
- Основа (каркас) – Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450
- 4 мотора DYS D2822-14 1450KV Brushless Motor.
- Регулятор оборотов DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления 1.5 kk21evo
- АКБ, тип: литий-полимер — Turnigy nano-tech 2200mah 4S
90C Lipo Pack
Всё это обойдётся где-то в 20 тысяч рублей
Этапы сборки квадрокоптера
Раскладываем всё это добро по столу и приступаем.
- Приблизительно прикидываем нужную длину проводов контроллера, добавляем небольшой запас на всякий случай, и обрезаем их до необходимой длины.
- Коннекторы припаиваем к выходам регуляторов для упрощения подключения моторов.
- Припаиваем регуляторы оборотов к плате разводки.
- Припаиваем коннектор АКБ тоже к плате разводки.
- Аккуратно прикручиваем моторы на лучи дрона. При установке бережём резьбу.
- Припаиваем коннекторы двигателей, если их нет.
- Прикручиваем лучи с моторами к плате.
- Крепим регуляторы к лучам коптера. Удобней всего это делать пластмассовыми хомутами.
- Включаем провода регуляторов к движкам в случайном порядке. Если понадобится, потом изменим порядок.
- Закрепляем на корпусе модуль управления (предварительно сфотографировав тыльную сторону, потом поймёте, для чего). Крепим хоть на жвачку, но рекомендую для начала применить мягкую двухстороннюю липкую ленту.
- Подключаем регуляторы оборотов к контроллеру. В порты, отмеченные знаками «плюс»-«минус»-«пусто», как правило, подключаем белым проводом к экрану.
- Оставшейся липкой лентой закрепляем приёмник поближе к блоку управления, и подключаем необходимые каналы к соответствующим портам. Применяем документацию данного приёмника и снимок внешнего края платы, дабы понять, какая стопка проводов за что отвечает.
- Подключаем питание прибора от батареи, сквозь коннектор.
- Вы молодец! Вы собрали свой первый дрон.
Установка и настройка оборудования
Теперь вам осталось его настроить, чтобы он не разбился в первый день полёта.
- Запускаем моторы (здесь по-всякому бывает, штудируйте документацию)
- Добавляем газ и смотрим, в какую сторону крутятся пропеллеры. Они обязаны вертеться так, как написано в схеме, что прилагается к контроллеру. По-другому управление станет инвертироваться. В случае, если что-нибудь пошло не так — переворачиваем коннектор, объединяющий движок и контроллер.
- Если всё вертится верно – прикручиваем верхнюю часть рамы. Не старайтесь втолкать её на место. В случае, если та встала туго — что-то идёт не так. Ослабляем нижние винтики, впоследствии установки затягиваем всё постепенно.
- Закрепляем блок с батареями.
- Монтируем адаптеры для пропеллеров на двигатели.
- Ставим пропеллеры, беря во внимание сторону вращения моторов. Приподнятый элемент лопасти обязан глядеть в сторону вращения.
- Есть! Ваш квадрокоптер готов к первому полёту.
Мы с вами рассмотрели простой пример сборки квадрокоптера, который не требует больших затрат и усилий в плане сборки. Соответственно, если вы решите поднимать на дроне что-нибудь потяжелее (навигатор, более тяжёлые средства съёмки и т.п.) – конструкцию придётся доработать и усилить. Тем не менее, вы уже получили первый опыт сборки подобных конструкций. Дальше вам будет проще понимать принцип работы коптера и знать, как его в дальнейшем доработать.
Источник
Тяжелый FPV-квадрокоптер — разработка, сборка и первый полет

Я занимаюсь квадрокоптерами в качестве хобби уже почти полгода. На свой последний аппарат я навесил камеру (GoPro HD Hero 2) и видеопередатчик, и летал на нем через видеоочки — крутейшее ощущение, я вам хочу сказать. Нo техника была нe идеальной. Старая рама X525 с алюминиевыми балками была недостаточно стабильной для веса в 1.8кг, коптер в воздухе потряхивало, да и выглядело это всe достаточно колхозно. Поэтому было принятo решение строить новый квад, на собственноручно разработанной раме, с учетом всех потребностей. А потребности были следующие:
- Место под всe оборудование. На новой раме должно былo быть достаточно места для камеры (без пропеллеров в картинке), передатчика, OSD, большого аккумулятора, плюс электроники управления (плата контроллера полета и GPS).
- Стабильность. Рама должна быть максимально жесткой, но в то же время обеспечивать виброизоляцию камеры от моторов.
- Внешний вид. Хотелось сделать коптер таким, чтобы было приятно на него смотреть, а не типичным для начинающих комком проводов и стяжек на стандартной крестовидной раме.
- (Вторично) Вес. Коптер на базe X525 весил 1.8кг с камерой и батарейкой, хотелось эту цифру слегка уменьшить, заодно и приподнять время полета на одном аккумуляторе.
Пораскинув мозгами и приняв решение, как всe это будет выглядеть, я установил LibreCAD и принялся за работу.
Разработка
Вдохновением для общей формы коптера послужила рама Spidex v2. Мне понравилось расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Такая схема позволяет расположить камеру так, что пропеллеры не попадают в ее поле зрения. Также они придумали хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. Ну и смотрится такой коптер, на мой взгляд, очень даже прилично.
Однако полностью под мои потребности Spidex не подходил. Во-первых, в нем использованы алюминиевые трубки, от которых я уже натерпелся — гнутся они, причем даже без аварий, просто от постоянной нагрузки. Во-вторых, я использую камеру GoPro Hero HD2, одолженную на неопределенный срок у сожителя — я нe готов монтировать ее на коптер без защитного корпуса, а Spidex этого не предусматривает.
Короче говоря, от Spidex я решил использовать только общую компоновку. Раму я решил собирать самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с зажимами. У знакомого дома стоит фрезерный станок, на котором можно вырезать пластины необходимой формы. Чтобы создать эту самую форму, я засел за LibreCAD, и вот что у меня получилось:

Общий вид коптера сверху
Центральные пластины и держатели камеры и аккумулятора
Удовлетворившись данным результатом, я передал чертежи знакомому, и заказал всe необходимые детали в местных (немецких) онлайн-магазинах. В частности, были куплены карбоновыe трубки (16×14мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой мелочевки.
Всю электронику я решил использовать с предыдущего коптера. Два квада мнe ни к чему, все прекрасно работает — зачем покупать новые детали? Список той самой электроники и других деталей, перекочевавших с предыдущей модели:
- Моторы: 4x NTM 28-30 750kv
- Контроллеры моторов: 4x HobbyKing Blue Series 30A, с прошивкой SimonK
- Пропеллеры: 4x Graupner E-Prop 11×5
- Плата управления: Crius MultiWii SE v0.1, с MultiWii 2.2
- Аккумуляторы: Turnigy Nanotech 4S 4500mAh 25-35C
- Камера: GoPro HD Hero2
- Видеопередатчик: ImmersionRC 5.8G 25mW
- Антенна: Clowerleaf 5.8G, DIY от умельца на местном форуме
- OSD: MinimOSD с прошивкой KV Team OSD для MultiWii 2.2
- GPS: Drotek I2C GPS
- Радиоприемник: Graupner HoTT GR-16, под мой передатчик (MX-16)
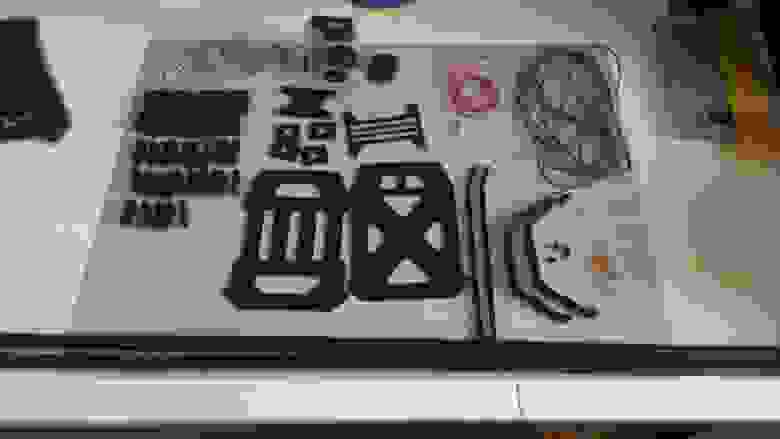
Сборка
Детали разложены на столе, сборка начинается. Порядок долго не продержался…
Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилятся из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо.

Примеряем зажимы к нижнему центру.

Центр собран для проверки, все ли стыкуется как надо. Вроде да.

Прикрутил все остальные части рамы. Похоже, что почти готово? Как бы не так.

Оси моторов нужно обрезать — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь…
… и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки нe забыть.

Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода.

Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо дофига — и это всeго лишь квад.

Размещаем контроллеры на нижней полураме.

Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано!

Изолируем контроллеры новой термоусадкой, когда все кабеля на месте.

Устанавливаем контроллеры моторов на их окончательную позицию. Проводов многовато, но достаточно чисто.
Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком…

… стягиваем тонкой медной проволокой…

… спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее.

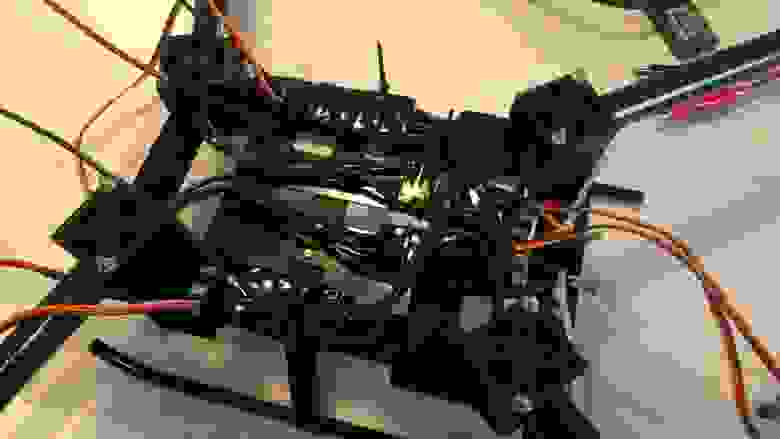
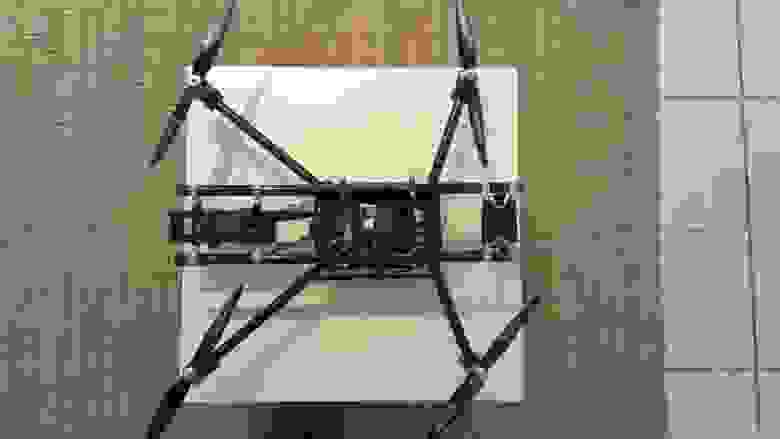
Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху.

Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором.
Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик.

Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки.

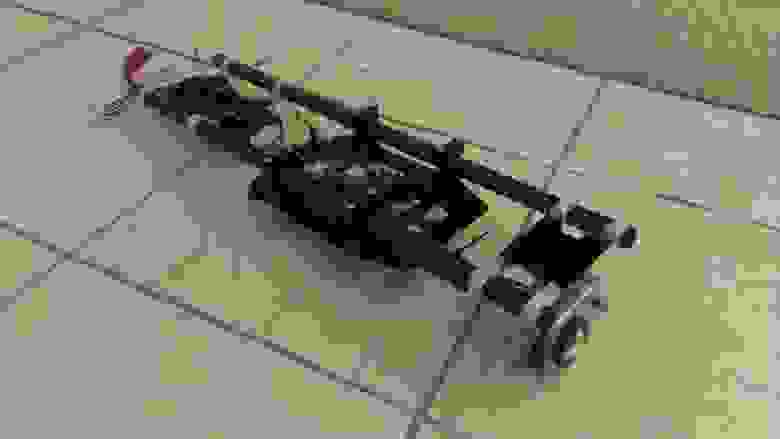
Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода…





Вот такой коптер получился. Единственное, чем я недоволен — это вес. Облегчить конструкцию не удалось, за счет зажимов для трубок и огромного количества винтов с гайками общий вес поднялся до 1950 грамм. Однако это еще вполне в рамках мощности привода — мои сомнения были полностью развеяны во время первого полета.
Первый полет
Ощущения от первого полета: фантастика! Коптер стоит в воздухe как вкопанный, отлично управляется как визуально, так и через FPV. Время полета на одном заряде — 14 минут, и запаса мощности хватает с лихвой для вполнe комфортабельного полета и маневрирования. С настройками контроллера я еще слегка поковыряюсь — GPS работает плохо (позицию практически не держит, return-to-home не работает), да и PID-параметры надо подстроить (убавить P по оси крена, чтобы избавиться от видимых в видео легких поперечных вибраций).
В общем и целом, проект удался. Коптер я буду активно использовать для полетов и съемок в ближайшие недели.
Любые вопросы, комментарии и т.д. приветствуются.
Источник



