
- RCDetails Blog
- О коптерах и не только
- Сборка дальнолета с 7″ пропами на раме Mode 2
- 7″ рама для FPV дальнолёта
- Список комплектующих для дальнолета на 7″ пропеллерах
- Сборка Mode 2 Shredder 7″
- Видео
- Сборка дальнолета с 7″ пропами на раме Mode 2 : 2 комментария
- «Собрать большой коптер ничего о них не зная?» — да ерунда
RCDetails Blog
О коптерах и не только
Сборка дальнолета с 7″ пропами на раме Mode 2

У коптеров с 7″ пропами, по сравнению с 5″ моделями, выше эффективность и больше время полета. Многие комплектующие для 5″ коптеров можно использовать и для 7″. Да, они крупнее, но носить их не сложно.
7″ рама для FPV дальнолёта
После консультации в FB группе IntoFPV, на тему, какую раму лучше всего использовать, выбор пал на Mode 2 Shredder 7″. Это одна из самых легких рам в своём классе, полностью в сборе весит 112,5 грамм.
В будущем я еще хочу попробовать раму Martian IV 7″. А сейчас давайте взглянем на Shredder 7″.
К сведению: когда мы говорим о размере рамы, то обычно подразумеваем максимально допустимый размер пропеллеров, которые можно с ней использовать. 7″ рама — значит на нее можно поставить пропы диаметром 7″. Такие рамы обычно имеют размер около 300 мм по диагонали. Более подробно всё это объясняется в статье про рамы для квадрокоптеров.



Очень нравится этот простой дизайн, видно, что не мало внимания уделено мелочам, да и легкость сборки — тоже не маловажный фактор.
Лучи легко заменяются (всего 2 винтика), а взаимоблокировка помогает им удерживаться на месте. В карбон впрессованы металлические шайбы с резьбой, так что гайки не нужны. Такое решение не только увеличивает объем пространства внутри рамы, но и упрощает сборку. Конструкция жесткая, лучи хорошо зафиксированы, без люфтов.

Мелочь, а приятно: кромки карбоновых деталей уже скруглены, доп. обработки не требуется (англ)!
Толщина лучей 4,8 мм, верхняя и нижняя пластины — 3 мм.
Есть два варианта защитного корпуса для камеры: синий и зеленый, оба распечатаны из TPU. Качество печати отличное.

Крепеж ставится без проблем, он разработан для мини и микро курсовых камер.

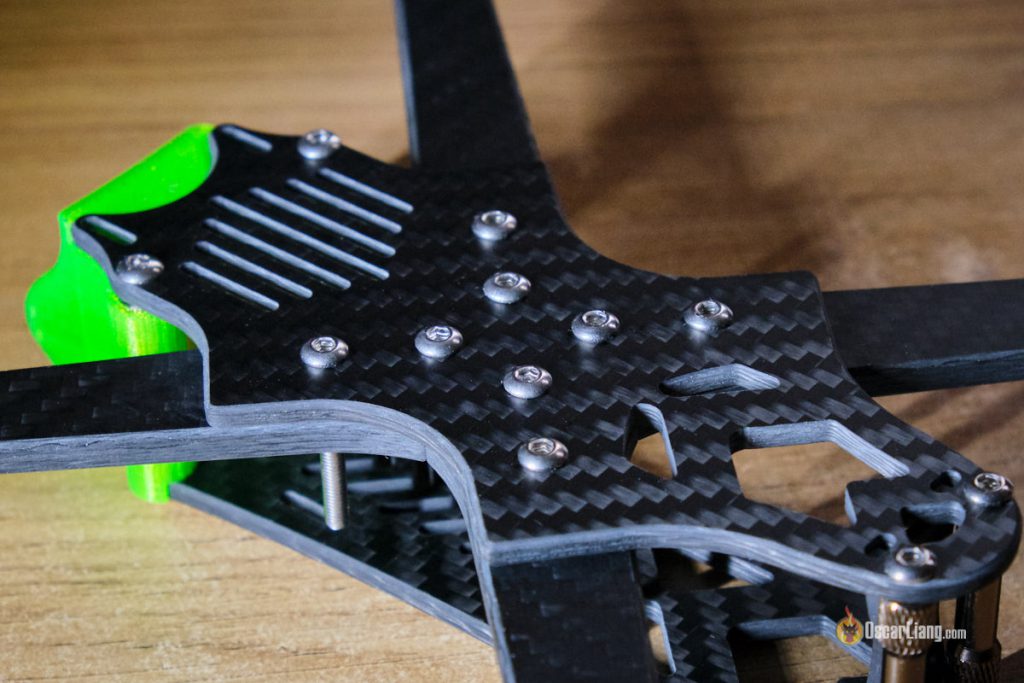
Один из двух винтиков на каждом луче используется для крепления полетного контроллера, так что в комплекте есть очень длинные стальные винты.
Сборка стека из ПК и регулей на железные винтики набирает популярность, раньше ставили на нейлоновые стойки, железные надежнее в случае падений. Однако я бы не стал использовать метал, если на платах нет резиновых шайб.
Нейлоновые детали ломаются при ударе и поглощают энергию. А если нет резиновых шайб, то железные винты полностью передадут удар на плату.
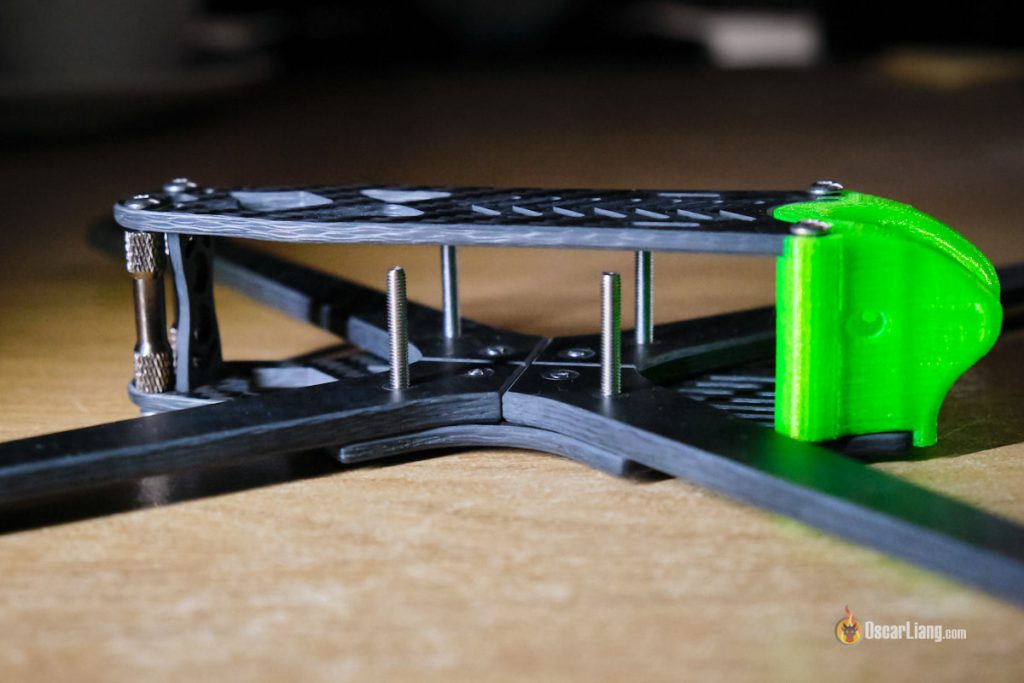
В Mode 2 Shredder есть небольшая карбоновая деталь, которая ставится сзади рамы, она нужна для крепления SMA разъема антенны — простое и эффективное решение. Хотя его можно улучшить — напечатать на принтере из TPU (термопластичный полиуретан), и закрепить на стойках. TPU мягче, и, возможно, поможет спасти разъем при падении.

Похоже, что рама разработана для верхнего расположения аккумулятора, снизу куча шляпок винтиков. Но нет ничего невозможного, и далее я покажу вам, как установил аккумулятор снизу.
Список комплектующих для дальнолета на 7″ пропеллерах
- Полетный контроллер: Kakute F7 AIO
- ESC: Tekko32 F3 Slim 45A
- Моторы: Jetstream 2407 1500KV
- Пропы: HQ 7035×3
- Видеопередатчик: Atlatl HV V2
- Антенна: Lollipop V2
- Пищалка: Vifly Finder V2
- Приемник: Frsky R9MM
- Аккумулятор: изначально я планирую использовать 4S 1800 – 2200 мА*ч LiPo, позже уточню исходя из фактического потребления, возможно поставлю более ёмкий
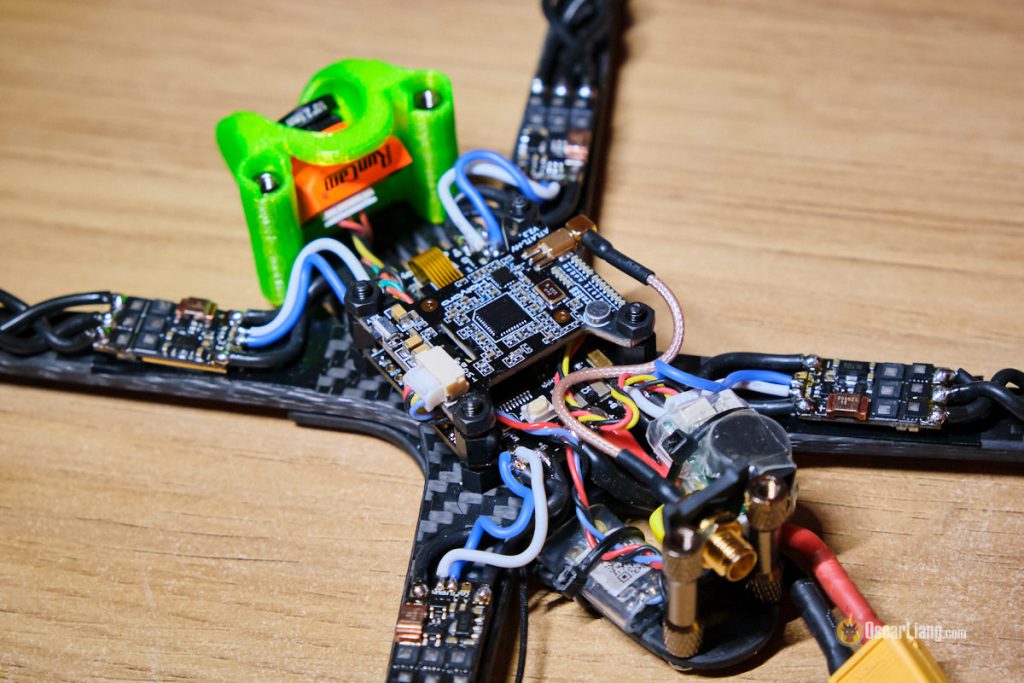
Вначале я хотел использовать регуляторы 4-в-1, но было довольно сложно уместить 3 платы в стеке (видеопередатчик, ПК, регули), т.к. макс. доступная высота стека всего 20 мм. Так что я взял узкие и легкие регуляторы от Holybro. В итоге всё отлично получилось, ширина регулей идеально совпадает с шириной лучей.
Я выбрал моторы Jetstream 2407 от Egodrift специально для этого 7″ коптера. Раньше я уже пробовал моторы размера 2207 с 7″ пропами и тяги явно не хватало, коптер был вялый, не отзывчивый, перерегулирование ПИД и тряску коптера невозможно было убрать при помощи настроек Betaflight.
Я сделал вывод, что у моторов 22XX не хватает усилия для вращения 7″ пропов. Надеюсь, новых, более крупных 2407 будет достаточно. Возможно вы уже заметили, что KV довольно низкий (1500 KV). Моя цель — высокая эффективность и большое время полета, я поставил трехлопастные винты, так что ВМГ довольно адекватная. При большем KV, я бы использовал 2х лопастные винты.
Что за дальнолёт получился бы, без автономной пищалки? 🙂 В случае неожиданной «посадки» с отстрелом основного аккумулятора, появляется реальный шанс найти коптер, если пищалка продолжит работать.
Похоже, что рама Mode 2 Shredder 7″ — это 5″ версия с удлиненными лучами, места в ней столько же. Хорошо, что я выбрал видеопередатчик Atlatl HV V2, он стоит в стеке с ПК и поэтому освобождается место для приемника и пищалки (которые и так с трудом поместились).
Сборка Mode 2 Shredder 7″
Как я уже говорил, хочу избежать использования металлических винтов совместно с ПК Kakute F7, т.к. у него нет шайб-демпферов. Поэтому я заменил длинные металлические винты на короткие и поставил нейлоновые стойки для стека.

Сборка очень простая. Собрав нижнюю часть рамы, я взялся за моторы и регули; поставил ПК; теперь осталось соединить их!

Провода до стека я оставил с запасом. Скорее всего обрежу их и переделаю (если захочу еще немного сэкономить вес).
Ставим верхнюю пластину и всё!

Итоговый вес даже меньше, чем у некоторых моих 5″ квадриков!

Как я уже упоминал, в этой раме не очень много места. Это недостаток простых / легких / низкопрофильных рам. Но с этим можно жить, если предварительно немного подумать.
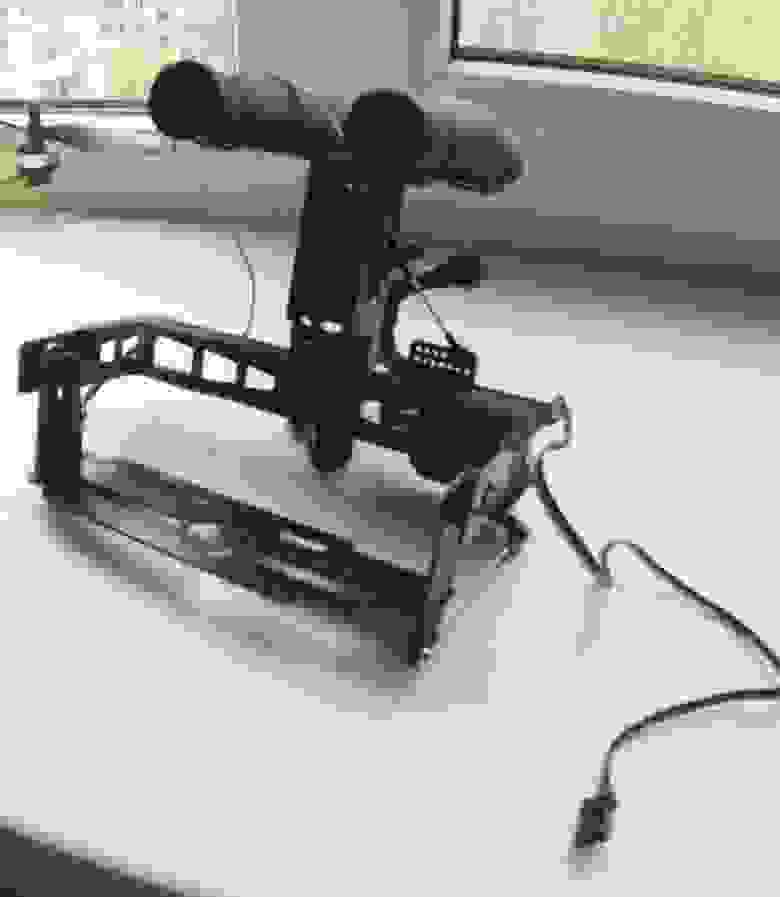
Крепеж для курсовой камеры выглядит довольно большим по сравнению с микро камерами, но ни один из элементов не попадает в кадр (Runcam Racer V2 объективом 1.8mm).

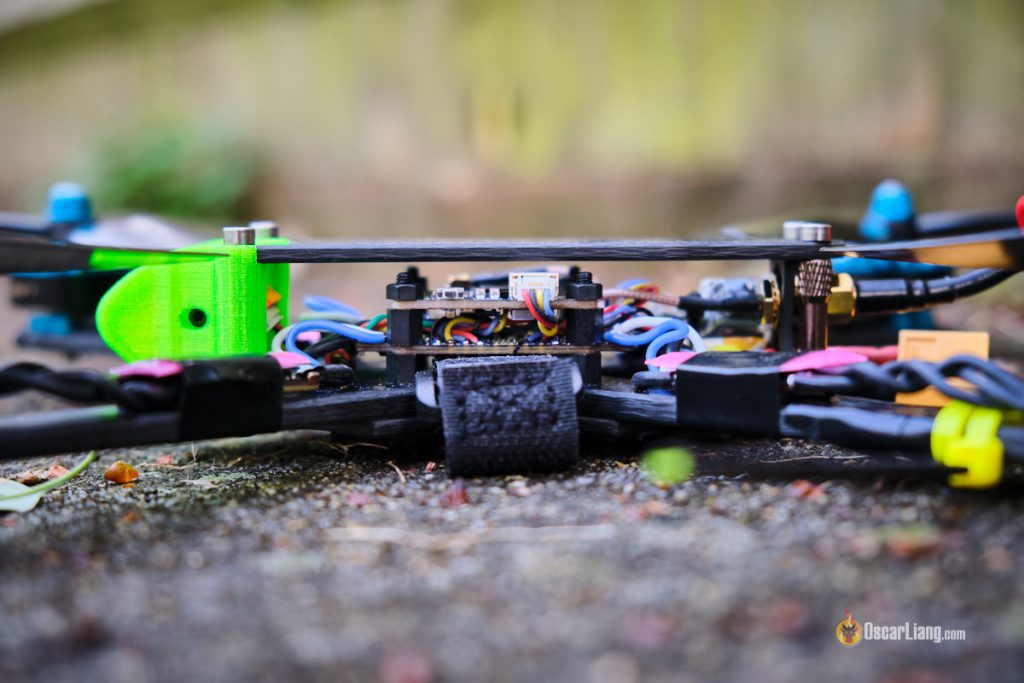
Вот картинка для сравнения 7″ и 5″ коптеров. Крупнее только из-за винтов.

Аккумулятор я решил ставить под нижнюю пластину. Чтобы шляпки винтов не помешали, я использовал специальную подкладку (англ). Она очень липкая и отлично удерживает аккумулятор, а толщины достаточно, чтобы шляпки не повредили аккумулятор.


Заметили? Я не поставил GPS! Что происходит? Как без GPS летать на большие расстояния? Он же нужен чтобы быстрее найти упавший коптер.
Ок, я хотел вначале разобраться с железом, получить хорошо летающий коптер, и только потом ставить GPS.
Видео
Это первый полет моей GoPro Hero 7, крепеж напечатан из TPU, по официальной модели Mode 2, скачанной с Thingiverse.
Первый полет прошел нормально. Со стоковыми настройками есть вибрации. Поиграюсь с параметрами и отпишусь по результату.
Сборка дальнолета с 7″ пропами на раме Mode 2 : 2 комментария
А можно фото где уже на нем уже стоит гопрошка? Как по дальности по времени и дальности полета?
Это перевод статьи. В оригинале такой картинки нет, да и Оскар про этот коптер дальше ничего не писал.
Источник
«Собрать большой коптер ничего о них не зная?» — да ерунда
Думаю все заметили, что в интернете достаточно много статей про квадрики мелкого размера: тесты, обзоры и т. д. А вот тестов больших коптеров маловато. Думаю в основном потому, что большой коптер – это чаще всего индивидуальная постройка (не всегда, но часто). Поэтому я решил написать про свой личный «самосбор» – гексакоптер на раме tarotfy680. В качестве предыстории хочу рассказать о том как я собирал этот коптер с нулевыми знаниями. За три года он претерпел много модификаций: от мелких до полной смены «тяговой начинки».

Итак, все началось когда я решил заниматься аэросъемкой. На то время у меня был куплен небольшой «шальной» квадрокоптер, на котором я научился немного летать и, как я понял позже, вообще, не годится для съемки, т. к. грузоподъемности не хватало для необходимого оборудования. В итоге пришла идея собрать свой коптер. Русскому же человеку покупать готовый дорого, и амбиций что соберет «дешевле» достаточно. 🙂
В итоге с другом «поскребли по сусекам» и нашли немного денег на покупку деталей. Все заказывал с Китая, в основном Ebay и Hobbyking. Ссылки на первые сетапы уже не найду, давно это было. И через пару месяцев ожидания (тогда почта работала хуже чем сейчас) мне выдали все посылки. Огромная рама! Огромные винты! Аккумуляторы тяжелые! Прямо восторг был после мелкого квадрика. 🙂
Итак по характеристикам первого сетапа:
- Рама tarotfy680 (с алюминиевыми лучами) Tarot FY680*.
- Моторы Heng Li Brushless Motors W4225 610KV* (тогда еще желтые были).
- Контроллер Naza-mv1 (первая версия назы, которой на ебее практически сейчас и не найти. Lite версия всех перепрыгнула уже. По сути, разницы то и нет).
- Регуляторы RCtimer 30a.
- Аппаратура Turnigy 9xr.
- Модуль и приемник к ней DJT Frsky.
- Пропеллеры карбон 12×6.
- Аккумы Zippycompact 3s 25c 5000mah ( тот еще отстой).
- Видеопередача Boscam 5.8 RC 305 и 200mw передатчик*.
Ссылку на 2х осевой подвес к сожалению не найду, но помню, что он стоил по тем деньгам 6 т. р. и был на сервах)
Итак (помните что знания нулевые) собрал все это чудо. Причем я заменил алюминиевые трубы рамы на 500мм карбоновые трубы. Амбиции о «метровом» коптере меня не покидали…

Сейчас меня пайка контактов того времени ввела бы в ужас, но всё-таки. Коптер был собран. Сделан throttlerange регуляторов (процедура, которая как я понял выравнивает мин/макс значения скорости моторов для каждого регуля) и первый запуск. В тот раз я думал что вижу гексу последний раз. Причиной тому был GPS-компас назы, который был развернут на 180 градусов. Думаю коптероводы прикинут что это такое. 🙂
Ну да ладно. После доработок, дочиток инструкций и, все же, укорочения труб до нормальной длины — новый тест. Ура! Все полетело. «Ничего себе собрал его все таки» – думал я. Даже failsafe работает. В принципе на этом радостные моменты закончились и начались «неприятки». Наконец-то купил sonynex 5nв Москве. Поставил на подвес. Взлетел и… Снимаю! Снимаю! Эм, нет не снимаю…
Коптер почему-то «проседает». Летит, летит и потом берет и плюхается в траву. Не быстро… но ведь…так не должно быть! Поднимаю повыше – летает, летает….и опять теряет высоту…. Причем бывает так, что достаточно стремительно теряет высоту. В чем дело? Все настройил, все что мог прошерстил… не хочет летать и все. Как оказалось, уже через некоторое время, эти движки лучше летают на 4s аккумах чем на 3s… но на то время я этого не знал (инструкцию же в детстве читать не научили) и поэтому: интернет, форумы.
Хм. Прошивка регулей… Ага, надо попробовать что это такое… Прошивка SimonK, ага… говорят круто, стабильно — пробуем. Не буду описывать режим прошивки, т. к. это тот еще геморрой, когда нет подходящих коннекторов. Итог был потрясающим! Вау! Стабильно висит в воздухе! Держит высоту! Камеру таскает! Но итог был потрясающим – итог был недолгим. Проба первого Failsafe. Возврат домой — ну… вернулся… с дрейфом (gps, видимо, был немного повернут), но вернулся. Хорошо.
Потом еще и назу прошил! Ведь прошивка вышла… как ее обойти. Говорят же еще лучше будет. И одним прекрасным днем….поехали полетать в поле.
«Отлети подальше» – говорили они, «все будет ништяк» – убеждали они. В конечном счете краш. Причем такой… нормальный. Карбоновый подвес в щепки (хорошо что камеру снял). Пару лучей под замену и пару пропов тоже. Шок! Почему! Из-за чего! Грешил на назу. Откат назы до заводской прошивки не помог.
На failsafe он все падал и падал. Но без него вроде летал. Конечно же, хотелось и поснимать что-то. Даже умудрился снять первый «шоурил» так сказать. И в итоге в один прекрасный день мы встали рано утром (чтоб не было людей в городе почти) и пошли поснимать городской мост. Во время запуска пару раз «проскакивали моторы», т. е. дергались и не раскручивались. Но что уж нам… зря пришли что ли? Все таки запустили его в воздух и даже что-то поснимали. Когда аккумы уже сели и я собирался снижаться и уезжать домой, на высоте около 10 метров над набережной около моста, гексакоптер решил что хочет быть квадрокоптером и просто-напросто отрубил 2 движка. Элегантно наклонясь на 90 градусов он принял курс на землю, точнее, на асфальт. Представляете вот эту картину в замедленной съемке? Летит коптер в землю, а у тебя в голове счетчик такой тикает: -20$… -50$… – 100$…
И тут, откуда ни возьмись, из-под моста еще и люди выходят. У меня волосы на голове поседели, выпали, отрасли и снова поседели. Только чудом он упал метрах в двух от них. С того момента вопрос о безопасности полетов для меня на первом месте и над людьми, вообще, стараюсь не летать. Немного отойдя от увиденного я оценил масштаб урона.

Даже микро SD-флешка сломалась пополам. 🙂

Видео не осталось на память… Какие тут съемки, когда уверенности в коптере нет? И тут я наткнулся на статью, что якобы прошивка SimonK не работает с «многополюсными» двигателями (вроде так называется).
«Етижи пассатижи» — снова подумал я. Новое скрежетание по сусекам и покупка новых регуляторов. Купил регуляторы turnigy plush 30a*. Поставил. Ого! Летает… Что-то мне еще страшно летать… Но все таки оно работало в нормальном режиме, и даже failsafe, будь он неладен. К этому времени я перешел на 4s аккумы (как надо было сделать вначале). И в момент моего счастья один человек все испортил. Он сказал что такой сетап опасный. Он может упасть завтра, через месяц, через год. Типо эти регули с такими движками не подружаться. Какие проблемы, денег-то уйма… купил двигатели T-motor 2814-10 770kvу знакомого. Так как у него с такими же регулями и винтами коптер летал, но на более длинной раме.

Все собранно и настроено. Но вот незадача, раскачивает коптер и все тут. Гейнами зажать до конца не получается. К тому времени я собирал уже свой самодельный подвес на БК моторах. (О нем расскажу в другой статье). Повесил подвес. Вес стал больше и эффект смещения центра тяжести в них сработал. Коптер стал летать нормально. Единственным минусом были полеты в ветер. Тогда его все-таки раскачивало и я нервничал. Но летал он довольно неплохо и довольно долго. Было снято несколько проектов и т. д.

После сборки квадрика на комплекте E300 от DJIя подумал о том, что хватит самодельничать, пора и гексу обновить, и купил комплект DJIe800*. Так же эта покупка предполагала переход с 4s на 6s аккумы. Посмотрев на инспайра и аналогов, понял, что на 6sдействительно будут «долгие» полеты. Такой же комплект стоит на DJIinspire 1. Получается практически шестимоторный инспайр). В таком сетапе он летает и по сей день. Коптер стал действительно стабильней, маневренней, и как ни странно тише. 🙂
Быстросъемные пропеллеры — это вообще потрясающе. Очень устал от этих закручиваний и откручиваний гаечек, ведь транспортировать со снятыми пропеллерами куда удобнее.

Единственное пришлось слегка удлинить раму. Дело в том, что этот комплект подразумевает 13-ые винты взамен моих 12-ых. И со стоковыми мотормаунтами они бы друг друга цепляли. Но покупать новую раму было б сильно затратно, поэтому просто решил поставить мотормаунты современных версий этой рамы. Купил на «хоббикинге» (вот такие) мотормаунты, которые крепятся с торца трубы, тем самым удлиняя ее примерно на 7-9 см. В итоге зазор между пропеллерами стал примерно 1,5-2 см. Сейчас коптер таскает 3х осевой подвес + sonynex 5n. На самом деле с его грузоподъемностью он спокойно вытянет и зеркалку, так как рекомендуемая нагрузка на луч 800 грамм, а максимальная 2000 граммм, просто я не считаю, что мне это сейчас надо.
Вот такая получилась история о коптеростроении с нуля. Сказать что постройка вышла дешевле чем можно было купить коптер? Конечно нет. Однако, полученный опыт стоит этих денег и времени. Да и еще к вопросу о покупке аккумуляторов. Никогда не покупайте эти желтые zippycompact! Неважно 3s или 4s — это хлам. К сравнению гекса, с t-motor 2014-10 и подвесом на них, летала 5 минут. Реально всего 5 минут! На паре аккумов в сумме 10000mah. Если и выбирать из «дешевых» аккумов, то либо простые zippyлибо turnigy. Кроме того, существенную роль играет токоотдача. На 40с коптер пролетает от 4 до 6 минут дольше чем на 25с (личный опыт).
Вывод:
1) Собрать коптер с нулевыми знаниями можно, но будьте готовы потратить на это время и деньги. Короче говоря, сначала вы приобретете знания, а потом коптер.
2) Это будет дешевле? Скорее всего нет.
3) Вы сможете гордо говорить «я сам его собрал» (из комплектующих).
4) Возможно на вопрос «сколько стоит?» вы будете отвечать «даже не знаю».
5) Приобретенный опыт поможет вам починить свой коптер в открытом поле с помощью молотка и зубила.
6) При постройке коптера вы научитесь паять, много паять, хорошо паять и в совершенстве овладеете исконно русскими ругательными фразооборотами.
На этом все. В следующей статье я продолжу тему «русских амбиций» и расскажу про строительство 3-х осевого подвеса, который сейчас установлен на этом коптере. Всем спасибо за внимание. 🙂




И напоследок, итоговый список составляющих моего сегодняшнего коптера:
- Рама tarotfy680 (с алюминиевыми лучами) Tarot FY680* ($108,99).
- Контроллер Naza-M Lite* (140,88$).
- Аппаратура Turnigy 9xr (45,70$).
- Модуль и приемник к ней DJT Frsky (48,17$).
- Аккумы ZIPPY Flightmax 8000mAh 6S1P 30C (121,83$).
- Комплект DJIe800* (349,99$).
Итого: 706,56$ за гексокоптер способный таскать зеркалку.
Источник



