
- Как сделать крутой электровелосипед своими руками: подборка ссылок за электромоторы и комплекты для конверсии
- Мотор-колесо
- Центральный мотор (комплект)
- Комплекты электромоторов на каретку велосипеда
- Мощный недорогой электровелосипед своими руками
- Электробайк. Контроллер двигателя своими руками
- Применение
- Устройство двигателя
- Цикл работы
- Транзисторы и Н-мост
- Прототип на Ардуино
- Мостовые драйверы
- Аппаратное прерывание
- Прототип на базе микросхемы MC33035
- Планы на будущее контроллера
Как сделать крутой электровелосипед своими руками: подборка ссылок за электромоторы и комплекты для конверсии
Сделать электровелосипед своими руками достаточно просто. Доступны качественные готовые комплекты для конверсии вашего велосипеда с добавлением мотора, аккумулятора и контроллера.

Я предлагаю подборку ссылок на готовые комплекты для конверсии и проверенные электромоторы различных типов, аккумуляторы для монтажа на раму или в багажник, контроллеры и экраны для настройки и управления, а также на аксессуары для электровелосипеда.
Сразу обращаю внимание: для выбора конкретного комплекта следует определиться с типом конверсии. Будет ли это мотор-колесо, или же мотор, устанавливаемый на заднюю каретку или центральную ось. Сразу же нужно определиться с напряжением и компоновкой сборки тягового аккумулятора. Ну и в завершение — выберете контроллер (экран) для управления электровелосипедом.

Мотор-колесо

Один из самый продвинутых вариантов конверсии в электровелосипед — это установка мотор-колеса с сопутствующей электрификацией. Рекомендую обратить внимание на полный конверсионный комплект мотор-колеса на 1500 Вт от Bafang. В комплекте есть все необходимое, за исключением аккумулятора (ссылки на аккумуляторы ниже). В лоте на выбор варианты на 500W/750W/1000W/1500W, соответственно подбираем аккумулятор на 36V/48V.
Центральный мотор (комплект)

Один из самых мощных вариантов — конверсионный комплект для установки центрального мотора с креплением в раму Bafang G510. Доступная мощность двигателя — 1 кВт. Напряжение для аккумулятора — 48 Вольт. Подойтет для всех типов электровелосипедов, в том числе для MTB, для карго-карго велосипеда.
Комплекты электромоторов на каретку велосипеда

Недорогой комплект для установки кареточного/центрального мотора — BAFANG BBS01B (разрешенные 250 Вт), это быстрый способ выполнить конверсию вашего велосипеда. Чуть подороже обойдется мощный комплект BAFANG BBS02B (750 Вт). Оба варианта имеют хорошее соотношение масса/цена/мощность и подойдут в большинстве случаев. Есть модель еще дешевле — это простой DIT мотор, который подойдет для начинающих.
Источник
Мощный недорогой электровелосипед своими руками

Однажды, еще будучи обычным деревенским школьником, в автомобильном журнале я увидел небольшую заметку о электровелосипеде, построенным каким-то иностранным энтузиастом, и который умел разгоняться до 40 км/ч и имел запас хода в 70 километров. После этой небольшой заметки я бросил безуспешные попытки завести старый двигатель от бензопилы Дружба и понял, что будущее наступило. На дворе было начало двухтысячных.
Потом была учеба в ВУЗе, и первая постоянная работа. Работа была не ахти какая, 4-хдневка сменялась трехдневкой, времени было много, а денег мало, и мысли потихоньку снова возвращались к идее построить электровелосипед. Интернет был мне не так доступен как сейчас, да и он, интернет, не был завален таким количеством информации по самодельному и не очень самодельному электротранспорту, не было такого количества всевозможных комплектующих. И в голове рождались сумасшедшие идеи и фантастические конструкции из болгарок, электрорубанков, стартеров… Помню даже была идея разместить на ободе неодимовые магниты, а на перьях с двух сторон от колеса электромагниты.
Невоплощенная мысль то забывалась, то разгоралась с новой силой, но потребовалось еще лет 10 для того, чтобы она начала превращаться в реальность.
Я не пошел стандартным для многих путем — купить готовый набор и установить его на велосипед. Во-первых, потому, что не готов был тратить значительные суммы на покупку комплекта, а во-вторых, это бы точно не удовлетворило жажды конструирования и созидания. Вообще, я изначально поставил цель построить велосипед мощностью под 1 кВт с бюджетом 10 000р. Вполне амбициозная цель.
Итак, на тот момент у меня уже был «горный» велосипед Forward Sporting 103, тяжелый, стальной, с зубастым протектором, он хорошо ехал по любому бездорожью, даже по булыжникам на обочине трассы, но очень плохо ездил по гладкому асфальту, издавая почти самолетное жужжание, нарастающее с ростом скорости, протектор покрышек очень быстро съедал накат. Но он верой и правдой служит уже больше 10 лет. Конечно, это идеальный вариант для электрификации).
Из одного полезного сайта про электротранспорт узнал, что автомобильный генератор, оказывается, прекрасно работает в режиме мотора с дешевыми китайскими контроллерами для мотор-колес. В гараже как раз валялся генератор на 80 ампер от вазовской классики. Карты сошлись, старая мечта вспыхнула с новой силой, и я понял, что пора!
Тут же с одного китайского интернет-магазина были заказаны:
- Аккумуляторы 18650 – 2.6 а*ч, 40 шт
- Плата балансировки и защиты – 1шт
- Бессенсорный контроллер для электросамокатов на 1 квт номинальной мощности
- Вольт-, ампер-, ваттметр с вынесенным шунтом
- DC-DC преобразователь, умеющий делать из 60вольт 12
На местном базаре были куплены:
- Трещотка (вместе с задней осью)
- Цепь велосипедная
- Звездочка на 10 зубов от веломотора F50
В гараже были найдены звездочка от велосипеда передняя – на 48 зубов, задняя на 22 зуба, куски прямоугольных труб, болты, гайки, провода, изолента и прочая мелочь.
Изначально было решено пожертвовать рекуперацией в пользу сохранения наката и легкого педального хода, считаю эту функцию более полезной в плане увеличения пробега. Передняя звездочка от советского велосипеда теперь стала задней звездой электробайка. Левый фривил не нашел, поэтому обычная правая трещетка была переделана на левое вращение – с помощью бормашинки и алмазной шарошки были переделаны посадочные места собачек, а сами собачки развернуты в другую сторону.
Корпус трещотки немного расточен для посадки на левую сторону колеса, туда, где барабан колеса выходит за пределы фланца. У многих велосипедов без дисковых тормозов там достаточно места для установки такого самодельного фривила. У 48 зубовой звездочки была отрезана педаль, и средняя часть была выпилена болгаркой. Звезда соединена с трещоткой винтами с гайками. Вся эта конструкция крепится к колесу как задняя звездочка любого бензодырчика – длинными болтами через спицы и резиновые прокладки, изнутри в межспицевое пространство колеса вставляются полушайбы и все сжимается, крепко обхватывая с двух сторон фланец колеса.


На вал генератора нужно установить звездочку на 10 зубов, для этого я приварил ее к гайке, которая раньше крепила шкив генератора. Гайка навинчивается на вал генератора, и сверлится насквозь вместе с валом и в получившееся отверстие вставляется длинный винт м6 с гайкой на конце.
Звездочки от веломотора пришлось немного обточить бормашиной – их зубья расчитаны на более широкую цепь.
Передаточного отношения 10/48 не хватит для резвого старта, будет чрезмерное потребление энергии, я это на тот момент уже прекрасно понимал. Требуется повысить передаточное число. Готового редуктора я не нашел, различные решения на основе редукторов дрелей/болгарок отмел сразу, хоть и мощности они передают сопоставимые, но эти мощности получаются за счет высоких оборотов, мне же требовалось передавать большой крутящий момент при сравнительно низких — до 3 тыс. в минуту – оборотах.
Поэтому было решено сделать промежуточный вал.
Изначально планируемая компоновка с мотором над задним колесом была отметена. Не хотелось терять возможность возить какой-нибудь багаж, ну или закрепить там детское кресло. Нужно было разместить все в треугольнике рамы. После многочисленных примерок была изготовлена рама для двигателя и промежуточного вала.
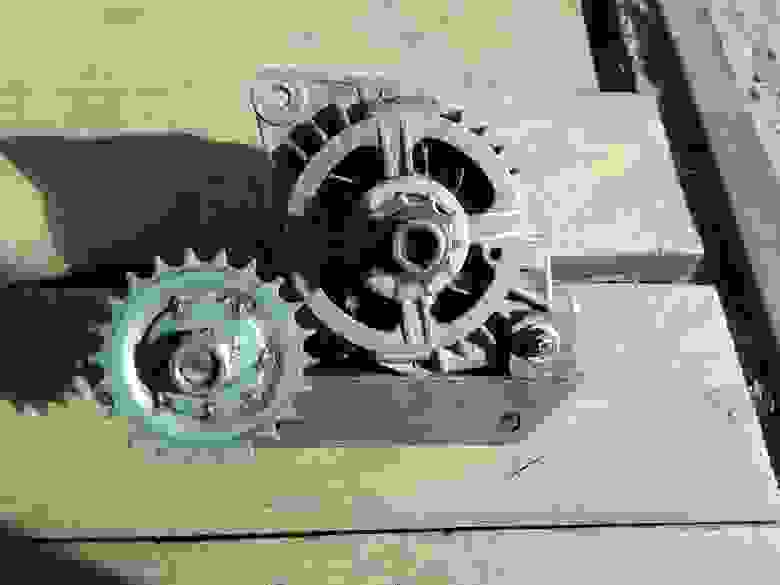

Промежуточный вал, изготовленный из строительной шпильки, вращается в двух подшипниках, и передает вращение с правой стороны рамы на левую. Звездочки крепятся так же как на валу мотора – они приварены к гайкам, зашплинтованным на валу винтами м6.
Общее передаточное число получилось 10.56. На этом с механической частью пожалуй все.
Батарея имеет конфигурацию 13S3P- 48 вольт и емкость 7.8а*ч, собрана из 39 банок 18650.
Банки спаяны паяльником 60 вт кратковременными касаниями. В процессе одна банка зашипела – то ли перегрел, то ли в газовый клапан попала паяльная кислота, благо акумов было 40 штук, а потребовалось 39.

Электрическая часть отличается от классического электровелосипеда необходимостью постоянного питания якоря генератора — ведь мой мотор, в отличие от готового мотор-колеса, не имеет постоянных магнитов. Задачу понижения батарейного напряжения до требуемого якорю, выполняет понижающий DC-DC преобразователь, который переваривает до 60 вольт входного и выдает регулируемое выходное напряжение.

В остальном ничего необычного – батарея, контроллер, ручка газа в виде переменного резистора даже пока без возврата в исходное положение)…. Китайский ваттметр с синей подсветкой в качестве бортового компьютера для контроля разряда батареи….
Но, несмотря на то, что это все больше похоже на самоходную бомбу, это поехало, и поехало весьма неплохо. С моим весом 75 кг в первую выездку удалось разогнаться до 37,7км/ч. Ускорение получилось весьма резвое, максималка тоже устраивает. Запас хода получился небольшой — в смешанном цикле с резвыми разгонами до максималки и ездой внатяг с небольшой скоростью вокруг гаража удалось выжать 10 км без помощи педалями, впрочем для батареи это был только первый цикл заряд – разряд. Ваттметр показал 350 с чем то ватт-часов, и напряжение 40 вольт в конце цикла.
Какие выявились недостатки? Ясно, что все провода надо собрать в жгуты, это пока еще только стенд для ходовых испытаний. Цепь в первичной передаче весьма шумит, требует натяжителя-успокоителя, но скорее всего буду переделывать на зубчатый ремень. Нужна ручка газа – в планах сделать в виде курка, с концевиком, запитывающим якорь только в момент нажатия. И целого отдельного исследования требует возможность регулирования мотора током якоря — это второй канал управления двигателем. Да, у моего двигателя нет постоянных магнитов, зато есть электромагнит, индукцию которого мы можем менять в широких пределах. Преимущество ли это? Не знаю. Ведь якорь требует дополнительной электрической мощности 30-50 вт. Зато, не меняя передаточного числа механической трансмиссии, мы можем менять характеристику мотора в широчайших пределах. Повышение тока на якоре снижает обороты, но повышает крутящий момент, понижение же — наоборот, повышает обороты, но понижает момент. Может быть, получится оптимально настроить его под свою конфигурацию «железа»? Или как вариант вывести регулятор на руль и получить этакую электронную коробку передач – на разгоне и на подъемах повышать тягу, а на прямых участках и больших скоростях повышать обороты, таким образом выжимая из своей конфигурации максимум. У кого есть мысли, как можно всесторонне исследовать эту тему? Сейчас думаю над методологией.
Немного о зарядном устройстве. Моя батарея требует зарядного напряжения 54 в при токе до 3 ампер. Для зарядки был приобретен регулируемый повышающий DC-DC преобразователь – вход от 12 до 50 вольт, выход от 12 до 60.

Ему на вход подается 12 вольт выпрямленного напряжения от блока питания для светодиодных лент. Этот блок питания может выдавать до 12 ампер. Все собрано в корпусе из фанеры, сделанном на самодельном лазерном резаке, снабжено регуляторами тока и напряжения и вольтамперметром. В корпусе установлены два кулера – один работает на вход, другой на выход воздуха, таким образом, наиболее горячие части (радиаторы) обоих электронных блоков постоянно обдуваются. Зарядное устройство используется также для периодической подзарядки автомобильного аккумулятора. Весьма полезная в хозяйстве вещь получилась!



Доволен ли я результатом – более чем! Ведь при таких характеристиках удалось получить работоспособный аппарат с неплохими характеристиками с бюджетом меньше 10 000р!
Подобной компоновки я нигде на просторах интернета не встречал. Но она дает возможность каждому самодельщику за совсем небольшие деньги получить вполне неплохой электротранспорт, превосходящий по характеристикам, как мне кажется, многие серийные образцы, прикоснуться к этому увлекательному и, безусловно, прогрессивному направлению развития техники, получить радость творчества и незабываемое ощущение от езды на электротяге…
Источник
Электробайк. Контроллер двигателя своими руками
Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
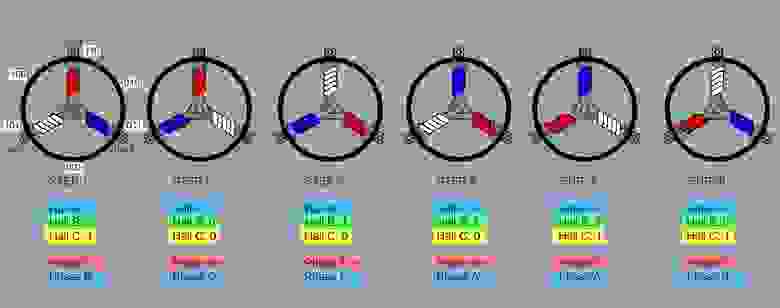
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
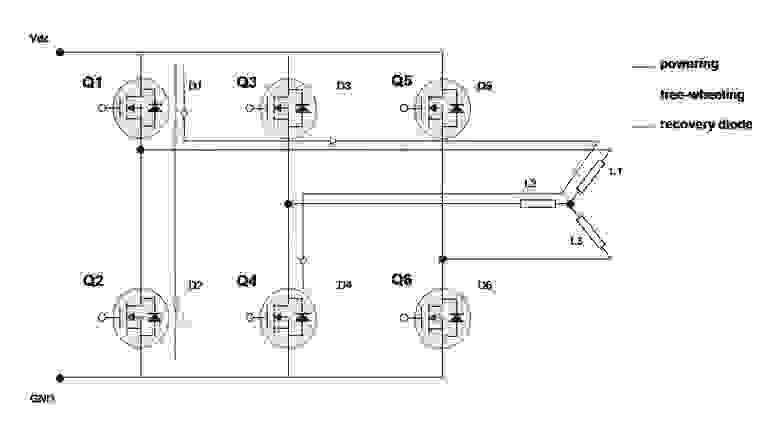
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
- HIP4086

- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
И готовый результат
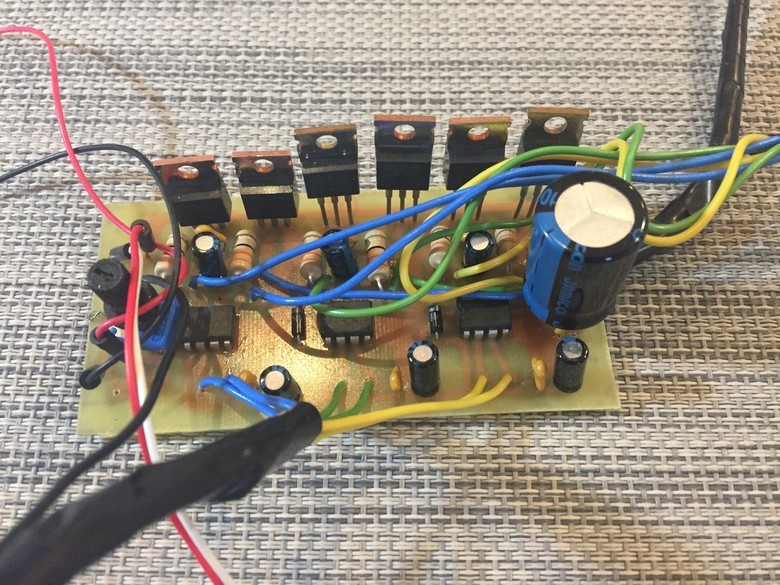
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
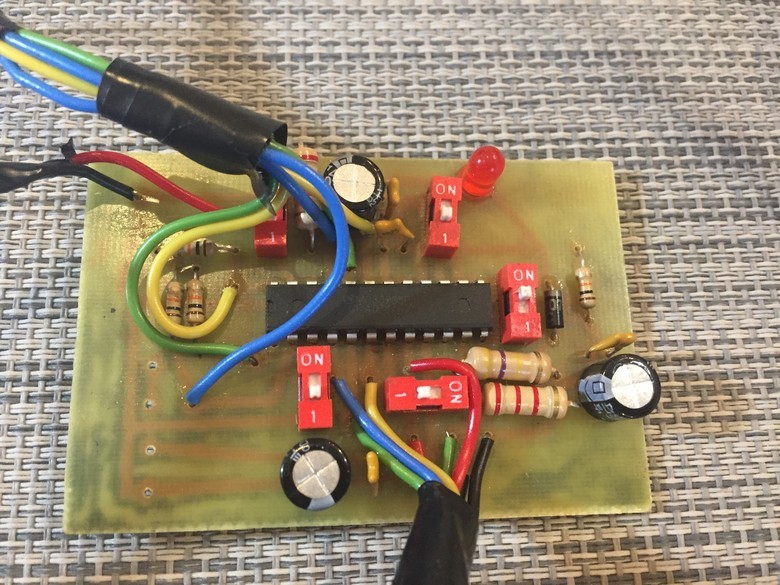
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.
- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.
Источник



