
- Умная автоматическая кормушка для питомца на базе Arduino – ШАГ 1
- Автоматическая кормушка с электронным управлением своими руками для домашних животных и собак крупных пород
- Шаг 1: Материалы
- Шаг 2: Подключение к макетной плате выключателей
- Шаг 3: Подключение к макетной плате ЖК-дисплея
- Шаг 4: Подключение к макетной плате электромотора
- Шаг 5: Программируем Raspberry Pi
- Шаг 6: Соединяем дозатор с электромотором
- Шаг 7: Желоб для ссыпания корма — опционально
- Шаг 8: Собираем и красим корпус
- Шаг 9: Установка камеры
Умная автоматическая кормушка для питомца на базе Arduino – ШАГ 1
В данном цикле статей я буду рассказывать о моем опыте сборки «умной» автоматической системы для кормления домашнего питомца, в моем случае – кота.
Хочу сразу отметить, что на первом шаге речь пойдет только об «автоматической» кормушке, а «умной» она станет на следующих этапах (если повезет, и все пойдет по плану).
Итак, начнем с концепции и целей:
- Сделать систему, которая освободит меня от обязанности кормить кота сухим кормом (шаг 1)
- Оснастить систему датчиком веса под миской и осуществлять кормежку в соответствии с показаниями весов: если миска пустая – подсыпать, иначе – ждать пока миска не станет пустой (шаг 2)
- Добавить в систему вай-фай модуль и видеокамеру для передачи фотографий с любимым котом, а также обеспечить контроль кормежки удаленно. Кроме того, собирать данные о том сколько кот съел и строить аналитику (шаг 3)
На первом шаге не требуется большое количество датчиков и манипуляторов, достаточно одного серводвигателя (например, Micro Servo Towerpro SG90 9 г), поэтому все управление происходит с платы ArdruinoUno, которая идеально подходит для задач такого рода.
Системы кормления так или иначе содержат некоторый контейнер, в котором лежит сухой корм, и вращающийся механизм, дозирующий его количество. Изучив опыт других «изобретателей», я бы выделила три основных механизма:
- Используется контейнер и сама система из под диспенсера мюслей (наверняка видели в отелях). Внизу в горлышке контейнера установлен стержень с лопостями. Ось стержня лежит вдоль плоскости горлышка. К нему прикреплен мотор, который прокручивает лопасть на одно деление один раз в заданный промежуток времени

Такой механизм выглядит довольно аккуратно, его легко собрать (собственно и собирать почти ничего не надо), но, увы, очень уж дорогой. Но тут на вкус и цвет.
Другой вариант — наоборот, конструкция делается своими руками из акрила, а вращающийся дозатор из CD дисков. Довольно понятно о том, как сделать такую кормушку рассказано в этом видео https://www.youtube.com/watch?v=C_ezRywtVg4&t=20s. Если есть под рукой акрил, резак для него, ну и в принципе есть какой-то опыт в сборке такого рода вещей, то это дов
ольно бюджетный вариант. Но не для таких как я — самостоятельно все спроектировать, вырезать и ровненько соединить требует другого уровня аккуратности.
Все материалы, которые мне были нужны для сборки кормушки на первом этапе:
- Стеклянная банка
- ArduinoUno
- MicroServo (у меня разрешенный угол поворота 180, но это не принципиально)
- кусок пластика
- магниты
- пины для соединении платы с серводигателем
- Usb зарядка на 5V
Логика работы механизма проста: в крышке банки делается дырка типа сектор (центр крышки не вырезается), такой же сектор вырезается из пластмассы. Внутрь крышки прикрепляется серводвигатель, например, скотчем. На ось двигателя насаживается сначала крышка, а с внешней стороны вырезанный сектор. Так, при повороте оси серводвигателя вырезанный сектор смещается относительно дырки в крышке банки.
Также надо не забыть сделать дырочку под вывод провода серводвигателя наружу для подключения к плате. На шаге 1 кормежка происходит по таймеру, кот у меня не обжора, поэтому открытие сектора происходит раз в день на короткое время, ниже код для Arduino:
Для крепежа банки к стене я использовала вот такие магниты, каждый на 4кг (мне кажется лучше использовать более мощные). К банке магниты крепятся просто клеем, к стене — винтами.
Плата прикреплена к банке при помощи такой липучки, ее удобно снимать и крепить обратно. Липучка такая продается в любом хозяйственном, используется для крепежа картин.
Поскольку у меня единственным внешним модулем является серводвигатель, то дополнительного питания не надо, достаточно запитать плату, ее можно подключить напрямую к сети через usb зарядку на 5V.
Вот как все выглядит в собранном состоянии:
Ниже я набросала несколько идей дальнейшего развития кормушки, их много и пока непонятно, что именно будет делаться дальше, эта часть для обсуждения.
- установка датчиков движения, фотографирование кота в тот момент, когда он появляется в зоне видимости. Интеграция датчика веса и датчика движения позволяет определять, когда кот просто прогуливается мимо кормушки, а когда пришел покушать. Соответственно, можно прикрутить аналитику, когда котэ предпочитает кушать и как много.
- можно добавить датчик веса в сам контейнер с кормом, чтобы кормушка определяла момент, когда становится пустой и присылала предупреждение хозяину, что, мол, пусто, надо пополнить. Потом, как вариант, прикрутить возможность автозаказа корма с любимого сайта с доставкой.
- Можно добавить возможность кормушки работать на двух котов:
- Либо это будут две разные кормушки, каждая из которых умеет отпугивать “чужого” кота
- Либо это одна, но как-то модифицированная
- Надо подумать как реализовать поилку и синтегрировать ее с кормушкой, добавить систему фильтрации.
Источник
Автоматическая кормушка с электронным управлением своими руками для домашних животных и собак крупных пород
Сегодняшняя статья об автоматической кормушке для собак крупных пород и других домашних животных на базе компьютера Raspberry Pi.



С его помощью вы можете:
- Легко и просто кормить крупную собаку
- Контролировать время кормлений
- Контролировать частоту кормлений и объем корма, который съедает питомец
- Иметь возможность покормить питомца, отправив письмо с электронной почты, если вы далеко от дома
Если все составляющие части у вас уже есть, процесс сборки кормушки для собаки своими руками займет не больше пары уик-эндов.
Шаг 1: Материалы

- Raspberry Pi 2 Model B
- Набор разветвителя Т-Cobbler для Raspberry Pi
- ЖК-дисплей 16х2
- Высокомоментный 12В электромотор
- Дозатор для сыпучих продуктов
- Вай-фай адаптер для Raspberry Pi
- Стержень для дозатора 6,4 мм
- Переходник на вал мотора 6,4-6 мм
- Два кнопочный выключателя
- Аккумулятор 12В для электромотора
- Блок питания мини-USB для Raspberry Pi
- Древесина для корпуса
- Соединительные кабели
- Труба для корма (опционально)
Шаг 2: Подключение к макетной плате выключателей


Выключатели дают возможность контролировать кормушку. В моей сборке установлены два кнопочных выключателя.
Один подключен к электромотору, другой нужен для сброса настроек таймера (переключатель сброса).
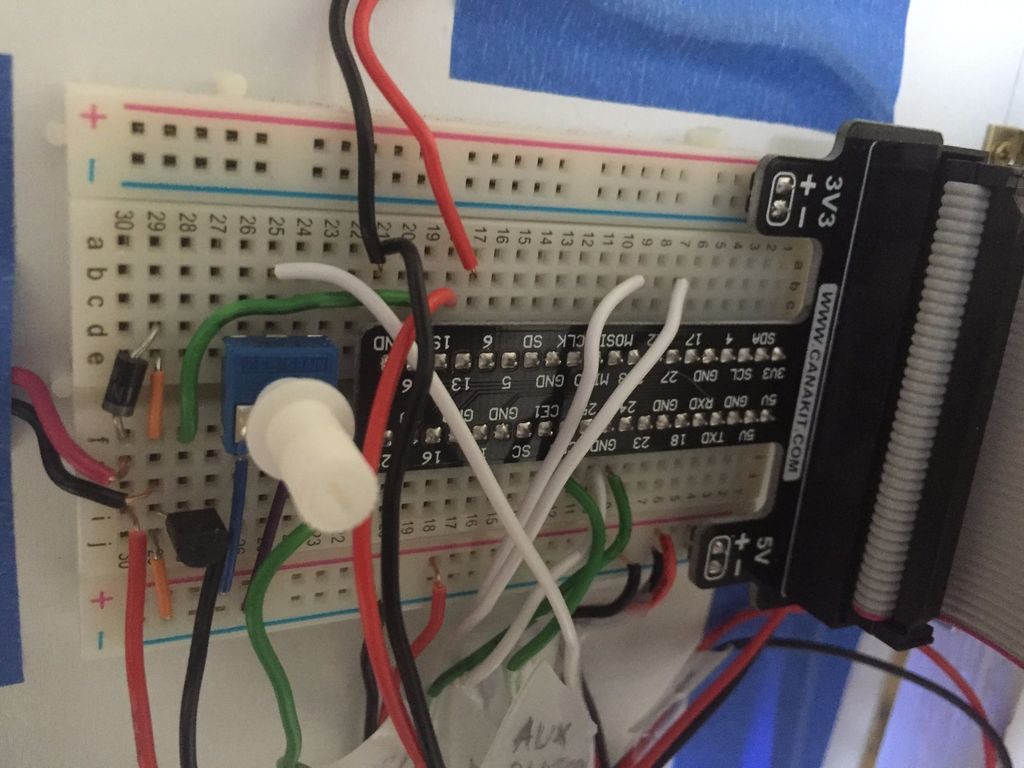
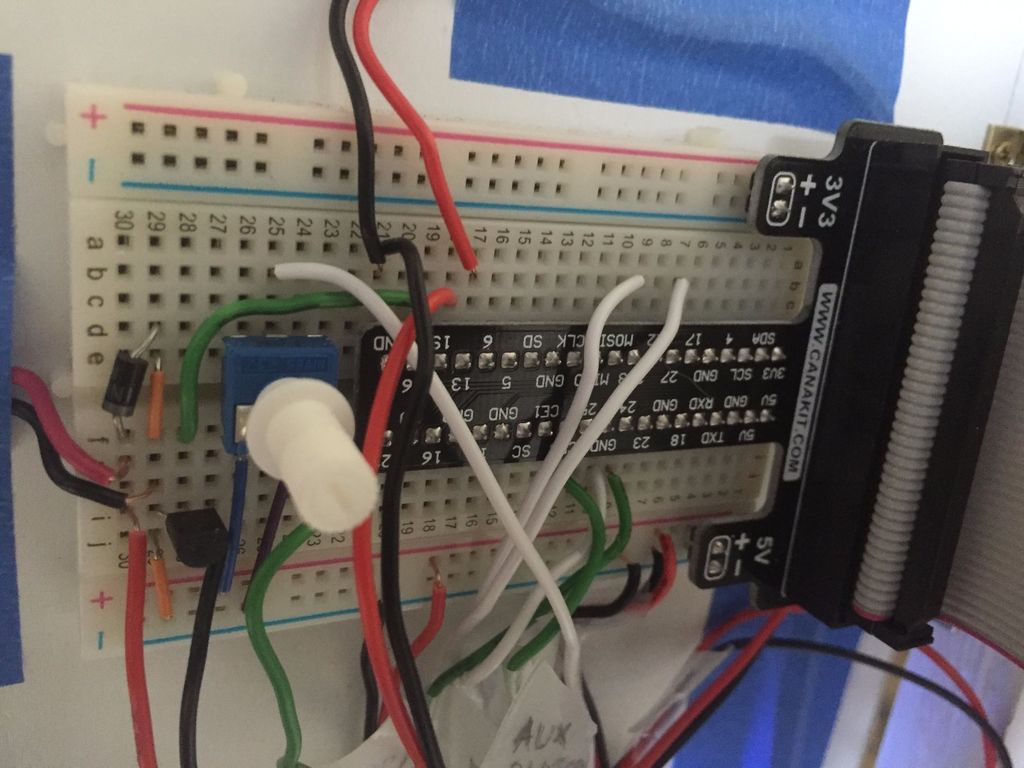
- Сначала подключите разветвитель к плате Raspberry Pi через шлейф. Красная полоса на шлейфе должна прийти на угол платы компьютера.
- Положите разветвитель на макетную плату.
- Соедините один контакт выключателя электромотора с пином 6 разветвителя. Второй контакт подключите к земле разветвителя.
- Соедините один из контактов переключателя сброса с пином 13 разветвителя, а другой контакт – с землей разветвителя.
Шаг 3: Подключение к макетной плате ЖК-дисплея
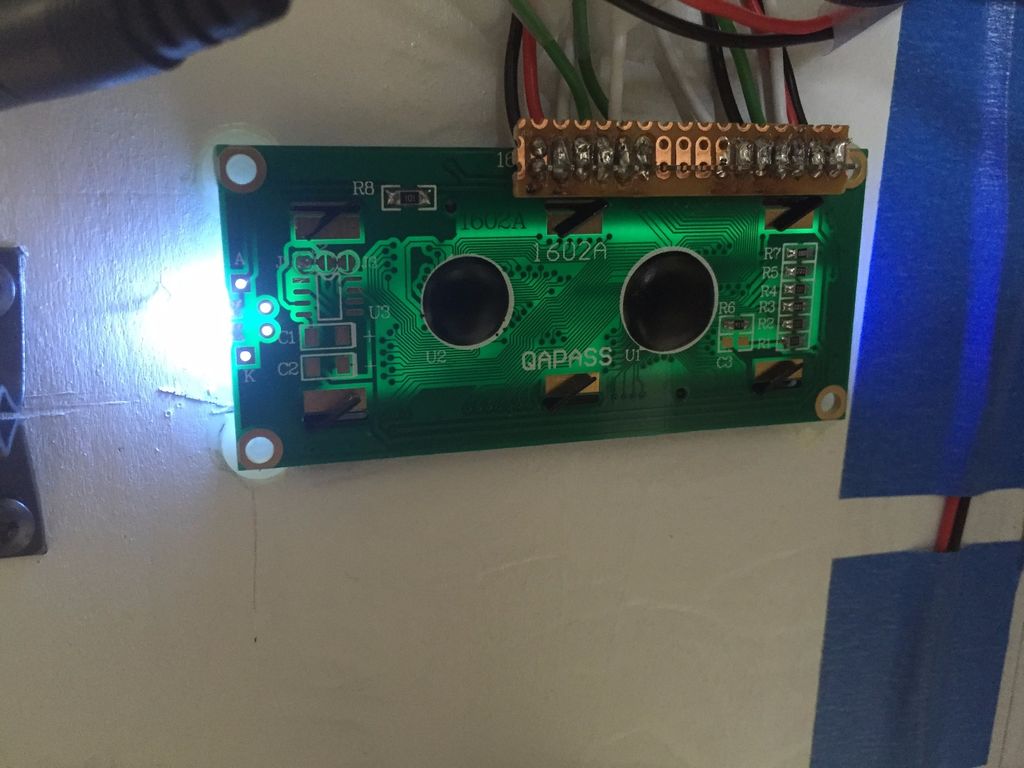
ЖК-дисплей запрограммирован на вывод часов, таймера обратного отсчета до кормления, статус-сообщений во время кормления, перезагрузки и т.д.
Этапы подключения дисплея к разветвителю и компьютеру Raspberry Pi:
- Припаяйте штыревые разъемы к панели ЖК-дисплея, к обратной стороне штыревого разъема припаяйте малую печатную плату. Я обрезал старую печатную плату до нужного размера. Это облегчит вывод проводов на макетную плату.
- Установите потенциометр 10 кОм на макетной плате.
- Подключите левую и правую ножки потенциометра к выводу 5В и земле соответственно.
- Подключите выводы дисплея к разветвителю в следующем порядке:
- пин 1 (VSS) – соедините с землей (черный провод)
- пин 2 (VDD) – соедините с 5В (красный провод)
- пин 3 (VE) – соедините со средней ножкой потенциометра
- пин 4(RS) – соедините с разъемом 25 разветвителя
- пин 5 (RW) – соедините с землей (черный провод)
- пин 6 (EN) — соедините с разъемом 24 разветвителя
- пины 7,8,9 и 10 дисплея пропустите
- пин 11 (D4) — соедините с разъемом 23 разветвителя
- пин 12 (D5) – соедините с разъемом 17 разветвителя
- пин 13 (D6) – соедините с разъемом 21 разветвителя
- пин 14 (D7) – соедините с разъемом 22 разветвителя
- пин 15 (LED +) – соедините с 5В (красный провод)
- пин 16 (LED -) – соедините с землей (черный провод)
Есть интересный вариант modmypi.com
Для программирования дисплея используется библиотека Adafruit (подробнее позже).
Шаг 4: Подключение к макетной плате электромотора
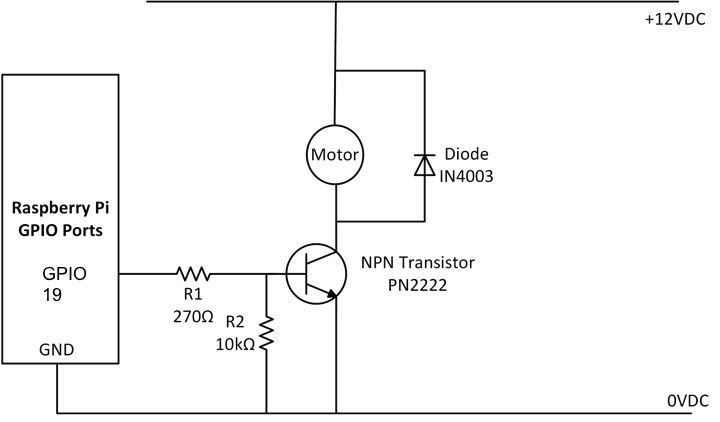
Высокомоментный мотор – это 12В 3,5rpm мотор с 6-мм D-валом.
Схема подключения простая транзисторная, с контрольным сигналом, идущим от пина 19 Raspberry Pi.
Соедините все компоненты, как показано на схеме. Не забывайте, что аккумулятор 12 В питает только электромотор.
Соедините землю от 12 В аккумулятора и землю от Raspberry Pi. Транзистор работает как выключатель, на вывод Raspberry устанавливаем выходное значение HIGH, для включения и выключения электромотора.
Шаг 5: Программируем Raspberry Pi
Основные характеристики автоматической кормушки для собак.
- При нажатии на кнопку в миску высыпается определенное количество корма.
- Для предотвращения перекармливания кнопка не работает в течение восьми часов после нажатия.
- При нажатии переключателя сброса кнопка кормления снова работает.
- При случайном нажатии на деактивированную кнопку кормления на дисплее появляется дружелюбное сообщение.
- На дисплее показано текущее время, а также время, оставшееся до следующего кормления.
- Отправка электронного письма на Google-аккаунт инициирует кормление.
- Можно отправить электронное письмо-запрос о времени прошлого кормления и времени, оставшегося до следующего кормления на Google-аккаунт.
- Выводит на дисплей сообщения с шутками Чака Норриса и любопытными фактами.
- Система защищена от сброса всех настроек, программа автоматически запускается при перезагрузке, сохраняя свой статус в отдельном файле.
Файлы
- petfeeder.py
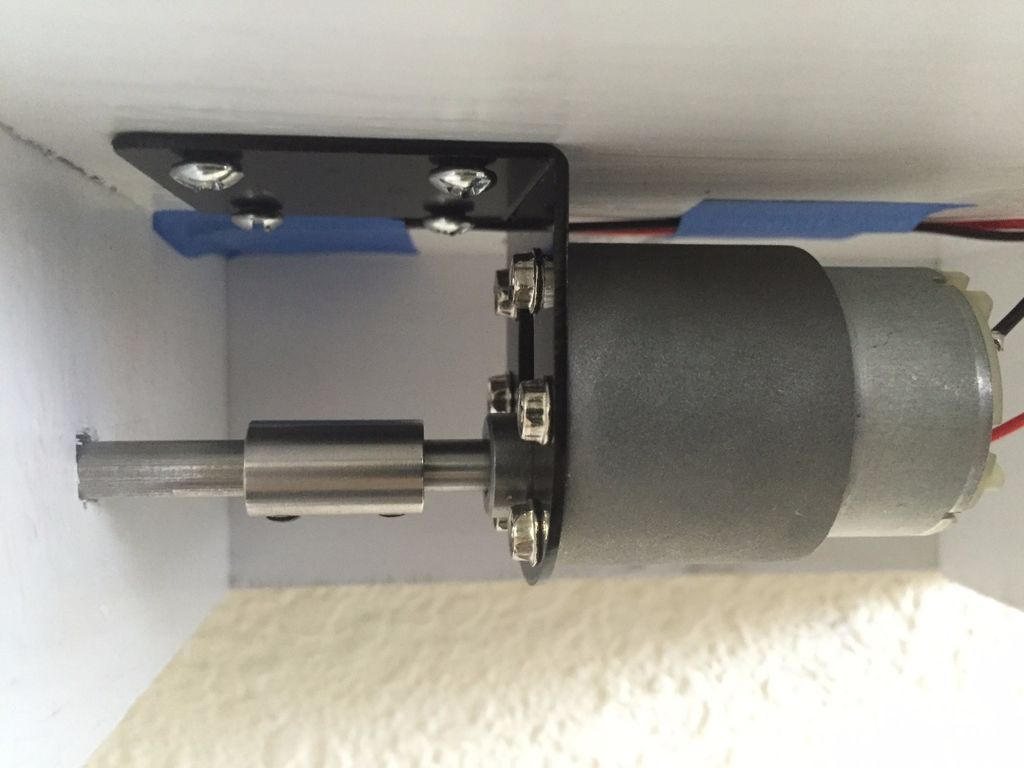
Шаг 6: Соединяем дозатор с электромотором


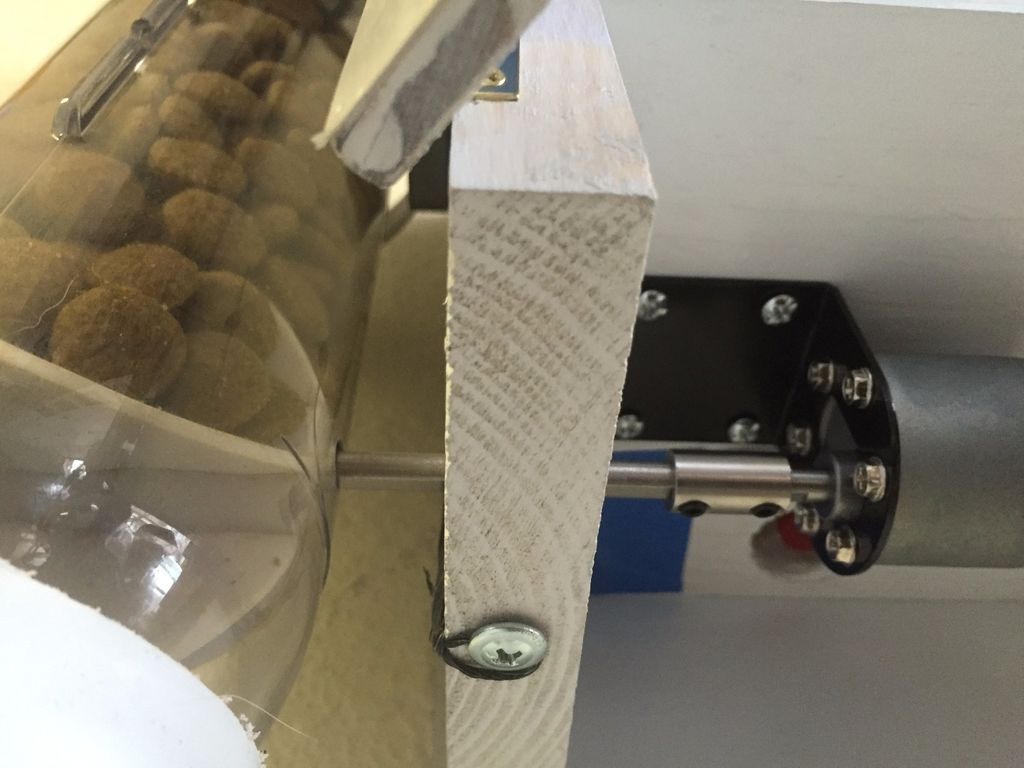
Дозатор идет в комплекте с монтажным набором и ручкой-барашком. Достаньте из упаковки барашек и пластиковый стержень.
- Возьмите металлический стержень 6,4 мм и обрежьте так, чтобы его длины хватило соединить крутящийся механизм дозатора с электромотором. Стержень может немного «ходить» в отверстии дозатора, но это легко исправляется вкладкой, вырезанной из ненужной пластиковой карты.
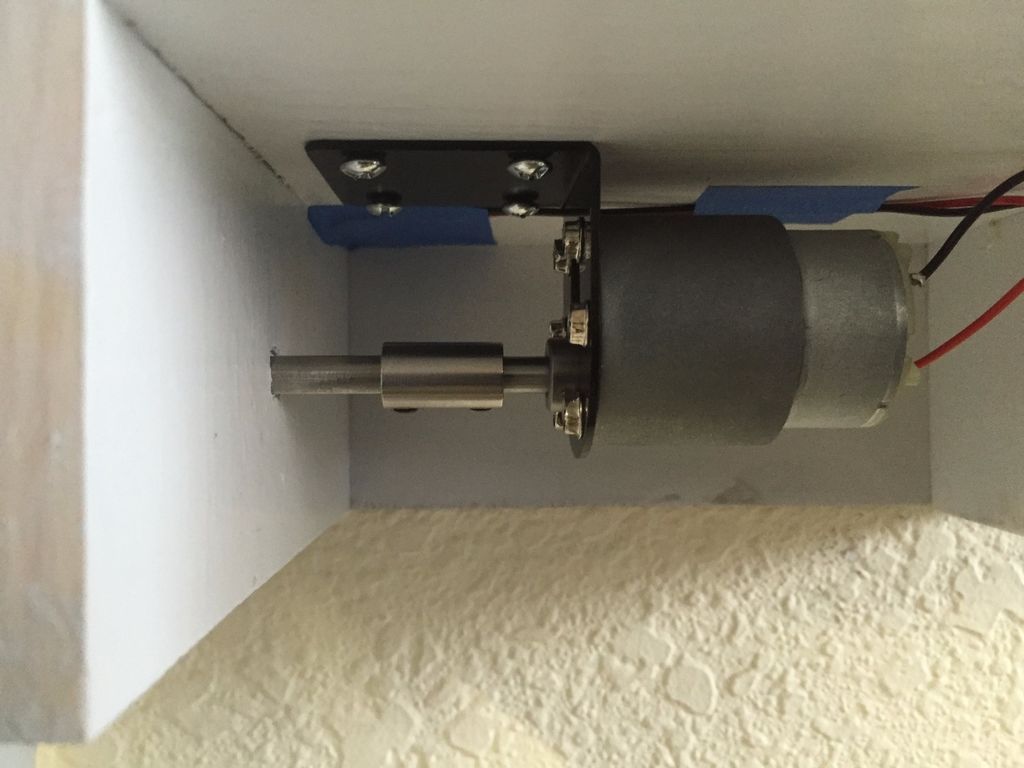
- Закрепите электромотор (я использовал крепление-уголок).
- Соедините стержень и вал мотора переходником 6-6,4 мм.
- Закрепите дозатор на постоянном месте.
Шаг 7: Желоб для ссыпания корма — опционально



Я не хотел постоянно нагибаться, чтобы нажать на кнопку дозатора, и хотелось уберечь пластиковый дозатор от собаки, поэтому установил дозатор повыше. Но с такой высоты корм разлетался по всему полу, поэтому я решил сделать желоб для ссыпания корма.
Для этого я использовал 76 мм дренажную трубу и колено к ней.
Отверстие трубы я частично перекрыл изолентой, чтобы гранулы корма ссыпались точно в миску.
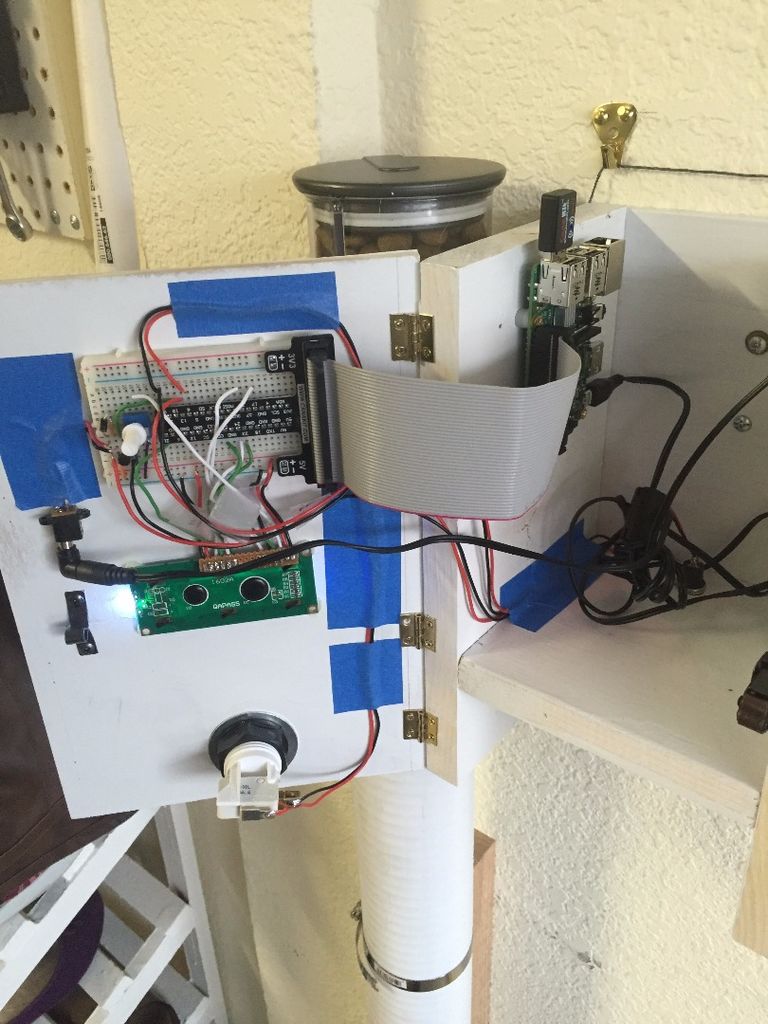
Шаг 8: Собираем и красим корпус

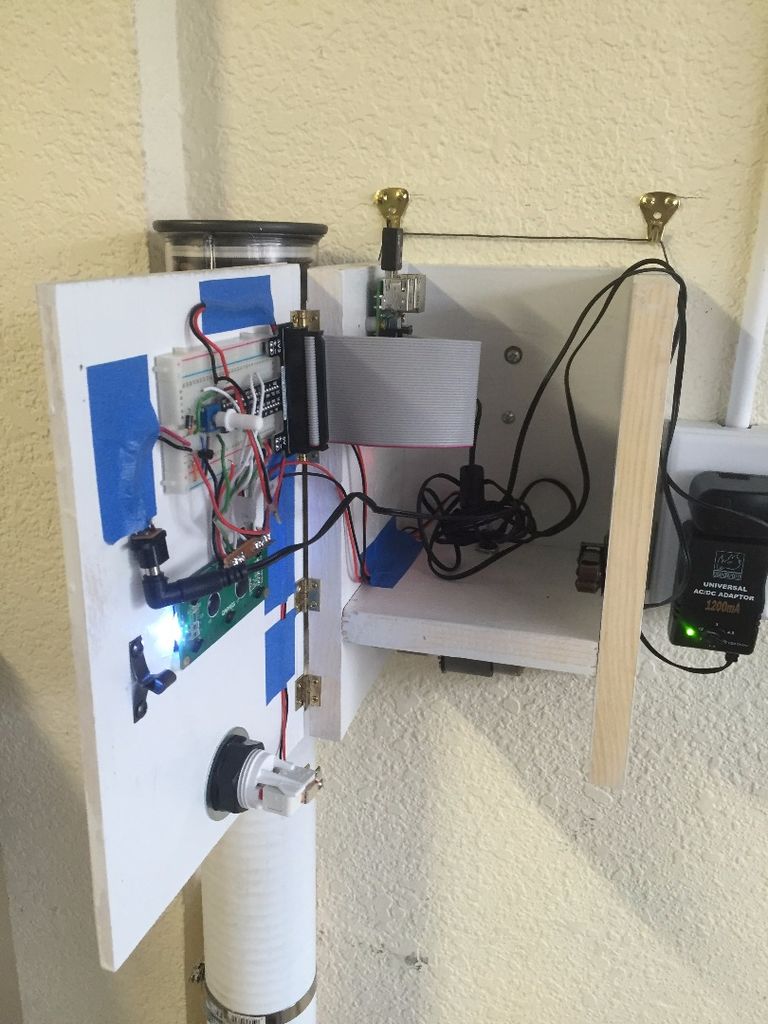


Сделайте небольшой деревянный шкафчик и покрасьте его.
Дверцу шкафчика сделайте на петлях, чтобы иметь постоянный доступ к системе на всякий случай.
- Нажмите на кнопку для начала кормления.
- Отправьте электронное письмо с темой «Когда» (“When”), чтобы узнать время последнего кормления.
- Отправьте электронное письмо с темой «Кормить» (“Feed”), чтобы покормить питомца.
На видео показана кормушка в действии.
Шаг 9: Установка камеры

На протяжении нескольких месяцев кормушка работала без нареканий.
Не хватало только подтверждения тому, что собака съедала корм, когда я использовал функцию удаленного кормления.
Поэтому я решил установить камеру Raspberry Pi.
После того, как вы подключите камеру к плате компьютера, нужно будет внести фрагмент кода в основной код, чтобы камера интегрировалась в систему. Камера будет делать снимки в определенное время и сохранять их в отдельном файле. При желании вы можете отправить этот файл на свою электронную почту.
В функции «Отправить письмо» (“sendmail”) в исходном коде просто нужно заменить параметр «attach=None» на «PICFILE» и вы должны получить письмо с файлом.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Источник



