
Электровелосипед своими руками: контроллер
Как выбрать контроллер для электровелосипеда, какие контроллеры бывают и в чём их разница?
Прежде чем ответить на этот вопрос, давайте разберёмся, зачем вообще нужен контроллер.
Для чего электровелосипеду контроллер
Наверняка почти каждый любознательный представитель мужской половины человечества в детстве имел дело с моторчиками, установленными в детских игрушках, например, электрических машинках или лодках.
Эти моторчики представляли собой двигатели постоянного тока. Для вращения к ним достаточно было подключить батарейку, и направление вращения менялось в зависимости от полярности подключения.
В том случае обмотки ротора (вращающейся части электродвигателя) подключаются к источнику питания по очереди через пару графитовых щёток, таким образом ротор приводится во вращение.
В электровелосипедах же используются бесщёточные моторы, а точнее трёхфазные асинхронные двигатели, которым недостаточно просто подать напряжение питания от батареи. На первый взгляд кажется, что всё только усложнилось, но дело вот в чём.
Во-первых, двигатели постоянного тока имеют узел, который требует обслуживания и периодического ремонта — это как раз те самые щётки и коллектор, по которому они скользят.
Во-вторых, КПД этих двигателей ниже, а вес больше. В третьих, они имеют ограниченный диапазон скоростей вращения. Всех этих недостатков трёхфазные асинхронные двигатели лишены.
Но последним требуется контроллер — устройство, обеспечивающее коммутацию обмоток строго по определённому алгоритму.
В зависимости от типа двигателя (с датчиками положения ротора или без) от контроллера к двигателю идёт либо только три силовых провода, либо к ним добавляются 5 или 6 тонких проводов.
Силовые провода — это те, которые непосредственно подключены к обмоткам двигателя. А тонкие (слаботочные) провода — это провода питания и сигналов с датчиков положения.
На фото силовые провода (синий, зелёный и жёлтый) спрятаны в стеклоармированных трубках, а слаботочные видны: синий, зелёный и жёлтый — это сигналы с датчиков положения, красный и чёрный — это питание датчиков, а белый — с датчика температуры, который спрятан под платой ближе к обмоткам.
Источник
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
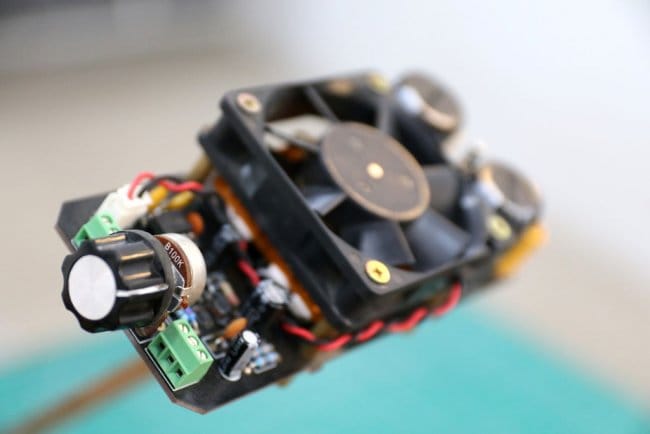
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
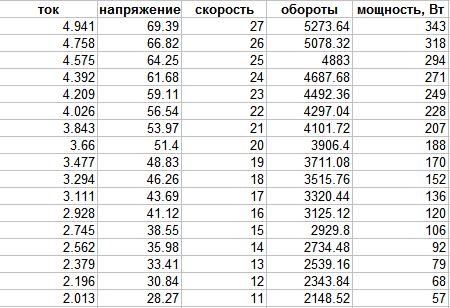
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
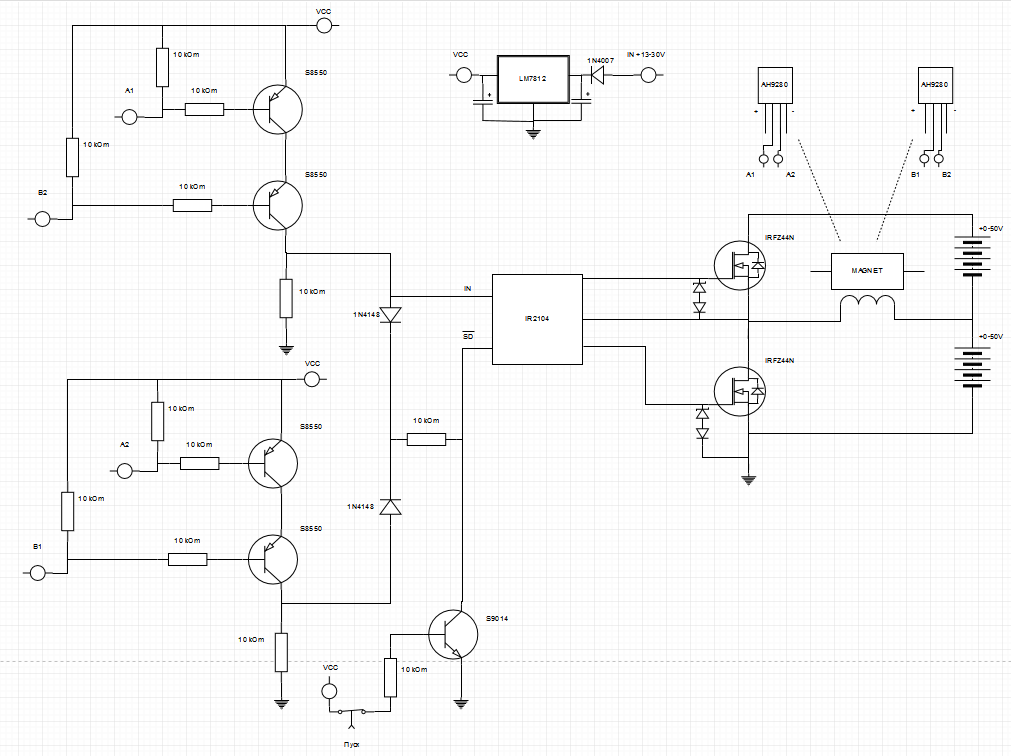
Контроллер
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Источник
ШИМ-регулятор скорости для самодельного электровелосипеда







Ранее мастер работал над преобразованием своего велосипеда в электрический, используя двигатель постоянного тока для автоматического механизма двери. Также им была создана аккумуляторная батарея, рассчитанная на 84 В постоянного тока.
Теперь ему требуется регулятор скорости, который может ограничивать количество энергии, подводимой к двигателю от аккумуляторной батареи. Большинство доступных в сети регуляторов скорости не рассчитаны на такое высокое напряжение, поэтому было решено сделать его самому.
В данном проекте будет спроектирован и построен индивидуальный ШИМ-регулятор скорости для управления скоростью крупномасштабных двигателей постоянного тока.
Шаг 1: Инструменты и материалы
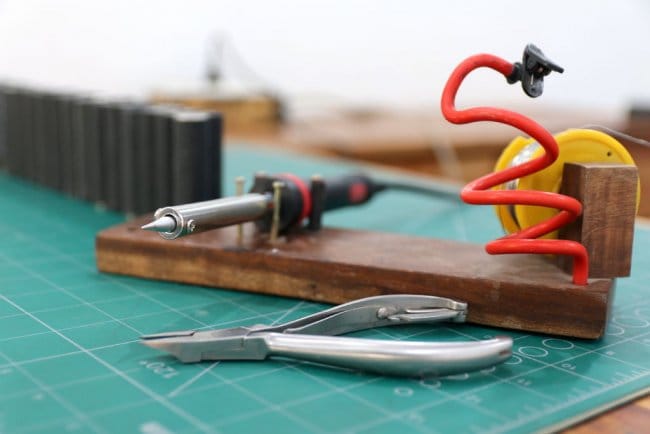




Для этого проекта понадобятся базовые инструменты для пайки, такие как:
— Паяльник;
— отсос припоя;
— Плоскогубцы;
Схема, файлы Gerber и список компонентов доступны здесь .
Шаг 2: Проектирование контроллера скорости

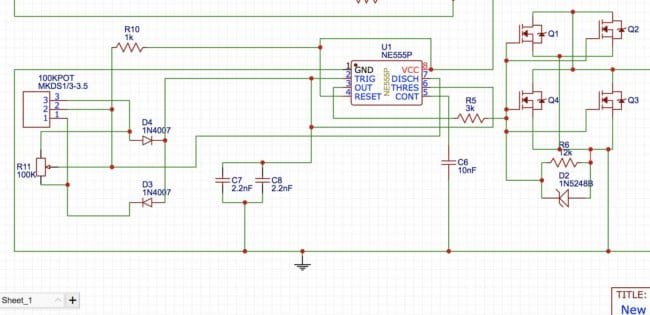

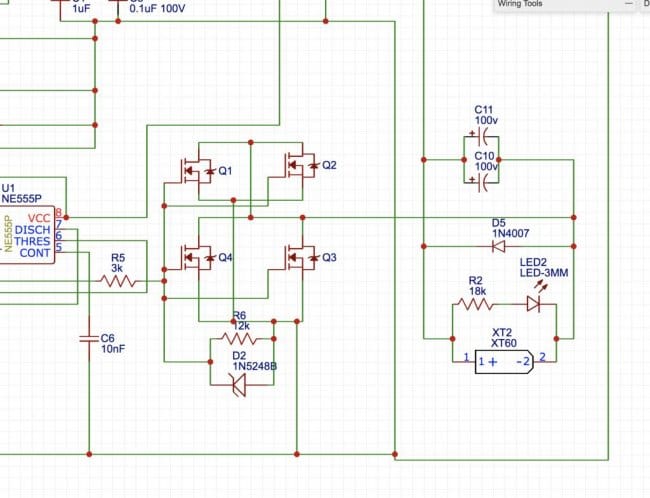
Так как мы стремимся контролировать скорость двигателя постоянного тока, то мы можем использовать две технологии. Понижающий преобразователь, который понижает входное напряжение, довольно сложен, поэтому было решено использовать PWM Control (Pulse Width Modulation). Подход прост, чтобы контролировать скорость питания батареи, он включается и выключается с высокой частотой. Для изменения скорости движения велосипеда изменяется рабочий цикл или период времени выключения контроллера.
В настоящее время механические переключатели не должны подвергаться такому высокому напряжению, поэтому подходящим выбором для такого применения является N-канальный Mosfet, который специально предназначен для обработки умеренного количества тока на высокой частоте.
Для переключения полушарий необходим сигнал ШИМ, который вырабатывается ИС таймером 555, а рабочий цикл сигнала переключения изменяется с помощью потенциометра 100 кОм.
Так как мы не можем работать с таймером 555 выше 15 В, придется включить интегральную микросхему преобразователя lm5008, которая понижает входное напряжение с 84 В до 10 В постоянного тока, который используется для питания таймера и охлаждающего вентилятора.
Для обработки большого количества тока было использовано четыре N-канальных Mosfets, которые подключены параллельно.
Кроме того, были добавлены все дополнительные компоненты, как описано в таблицах данных.
Шаг 3: Проектирование печатных плат

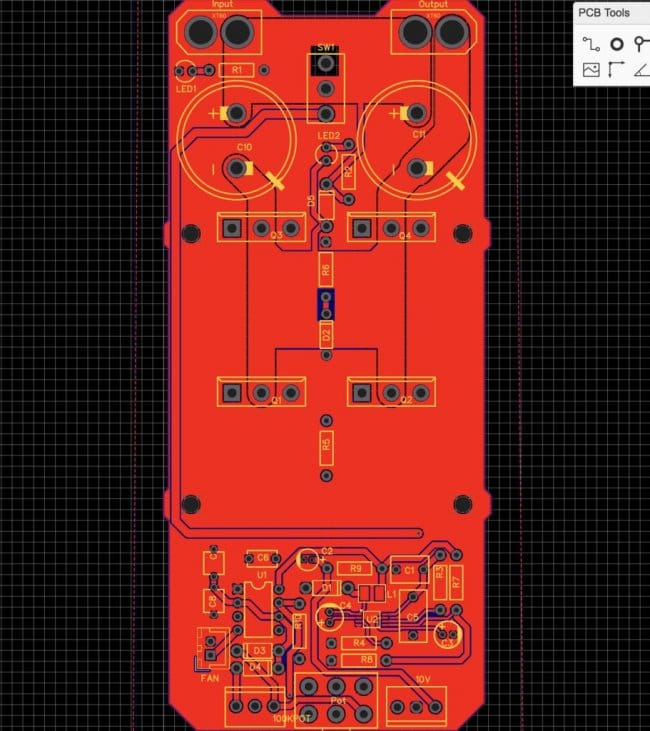

Закончив схему, было решено заняться разработкой специальной печатной платы для регулятора скорости. Было решено спроектировать это устройство так, чтобы оно было способно к дальнейшим модификациям для других DIY-проектов мастера, которые используют большие двигатели постоянного тока.
Идея проектирования печатной платы, возможно, требует больших усилий, но оно того стоит. Всегда старайтесь проектировать определенные модули на плате с другой стороны. К таким модулям относятся схема управления и питание. Это делается для того, чтобы при соединении всего вместе можно было выбирать подходящую ширину печатной дорожки, особенно на стороне питания.
Также было добавлено четыре монтажных отверстия, которые будут полезны для монтажа контроллера и удержания вентилятора вместе с радиатором над полевыми МОП-транзисторами.
Шаг 4: Заказ печатных плат



В отличие от любой другой заказной детали для DIY-проекта, печатные платы, безусловно, самые легкие. Как только файлы Gerber для окончательной компоновки печатной платы были готовы, осталось сделать несколько кликов для заказа специализированных печатных плат.
Все, что сделал мастер этого проекта, так это отправился на PCBWAY и загрузил свои файлы Gerber. После того, как их техническая команда проверит дизайн на наличие ошибок, дизайн будет отправлен на производственную линию. Весь процесс займет два дня и печатные платы придут по указанному адресу в течение недели.
Файлы Gerber, схема и спецификация для печатной платы регулятора скорости доступны здесь .
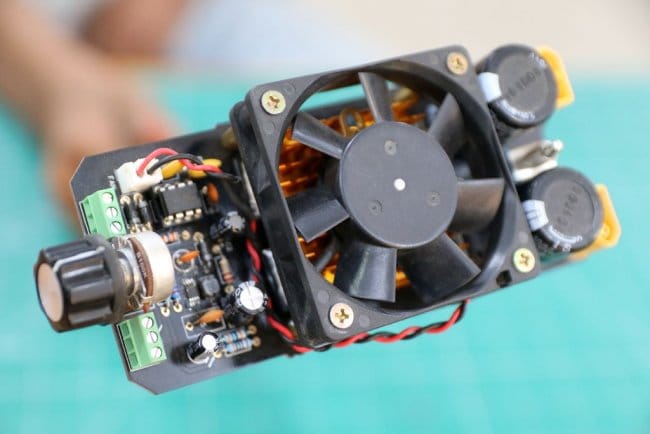
Шаг 5: Сборка печатных плат


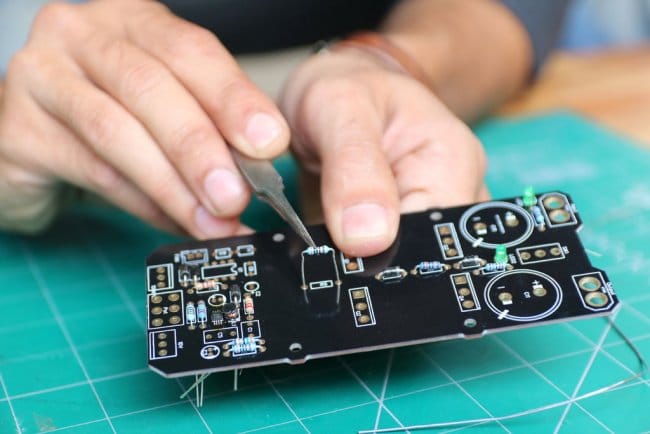





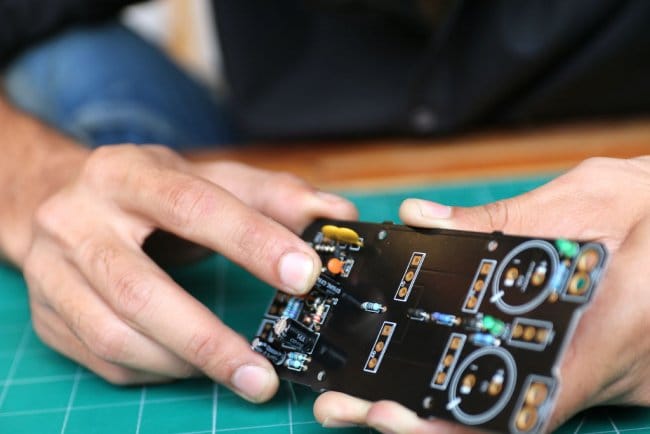

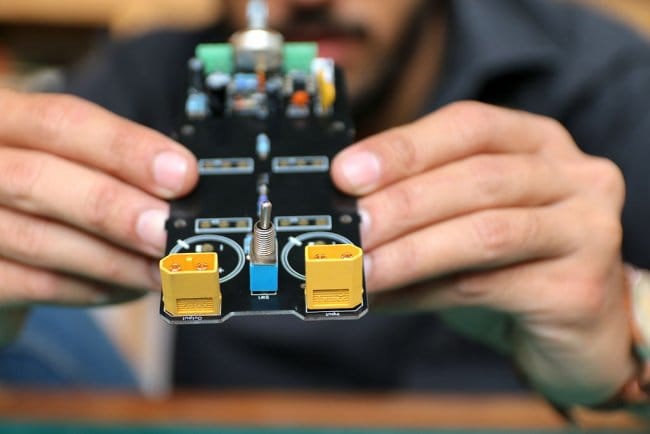






Как и ожидалось, печатные платы прибыли в течение недели. Качество печатных плат абсолютно безупречное. Пришло время собрать все компоненты, как указано в спецификации, и поместить их на место.
Чтобы все шло гладко, нужно начать с самого маленького компонента на печатной плате, который в нашем случае является преобразователем LM5008 Buck, компонентом SMP. Как только компоненты были припаяны, согласно схемы, мастер приступил к работе с более крупными компонентами.
После сборки платы, пришло время расположить таймер 555 с выемкой в правильном направлении.
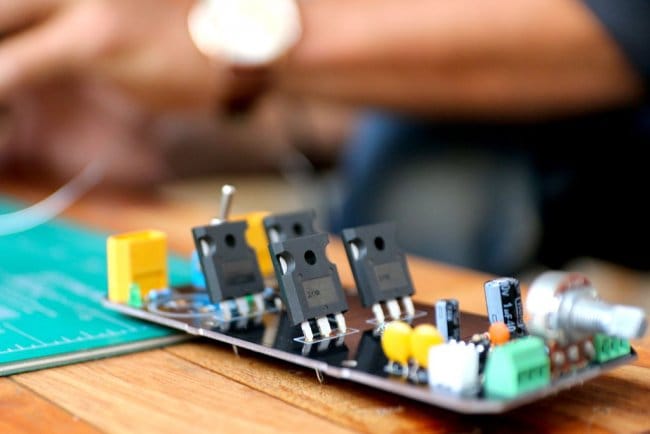
Шаг 6: Охлаждение
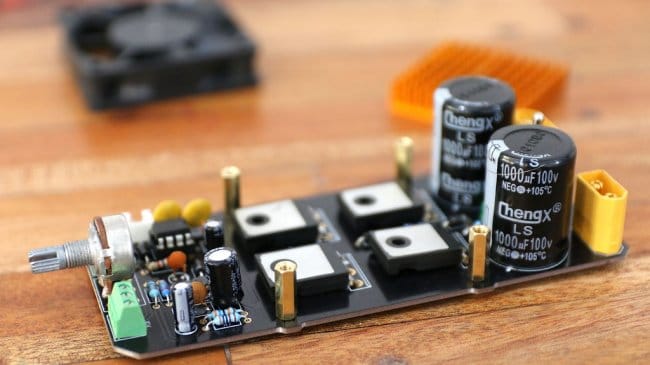

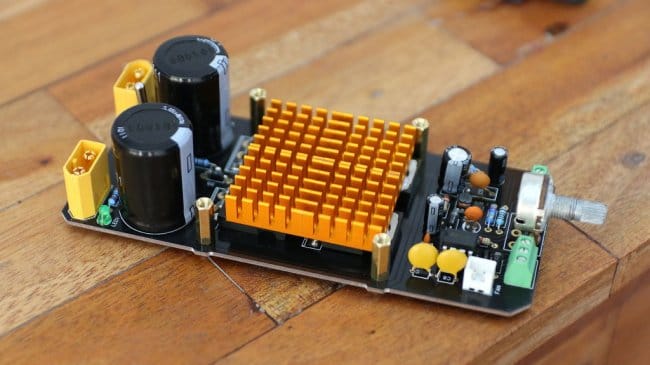

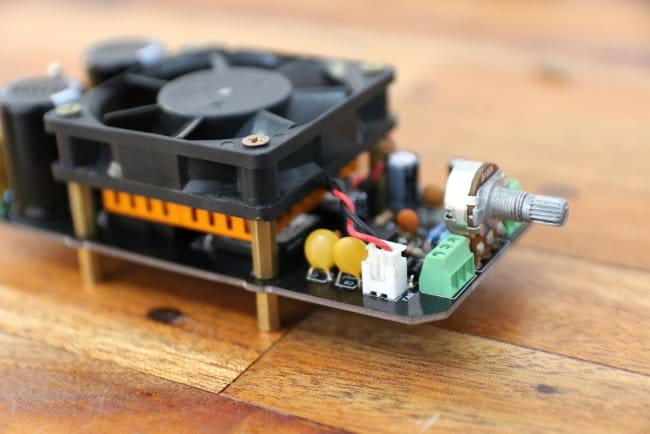

С таким огромным количеством энергии, с которым потребуется иметь дело, очевидно, что плата будет нагреваться. Поэтому, чтобы справиться с избытком тепла, необходимо согнуть полевые МОП-транзисторы и установить вентилятор на 12 В с переключателем между радиаторами.
После этого ШИМ-регулятор скорости готов к работе.
Шаг 7: Тестирование контроллера




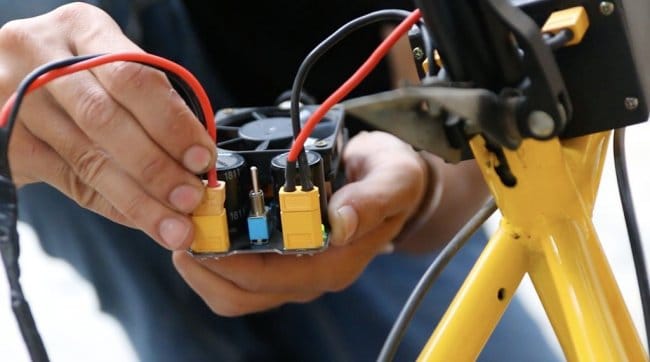


Для тестирования контроллера будет использована аккумуляторная батарея на 84 В для электрического велосипеда, которая была изготовлена мастером ранее. Контроллер временно подключен к аккумуляторной батарее и мотору, который прикреплен к велосипеду для привода заднего колеса.
После переключения переключателя, контроллер включается и вентилятор обдувает воздухом полевые МОП-транзисторы. При вращении потенциометра по часовой стрелке, двигатель начинает вращаться и постепенно увеличивает скорость, пропорционально вращению ручки.
Шаг 8: Окончательные результаты






Регулятор скорости готов и он превзошел все ожидания мастера в отношении его возможностей. Контроллер легко работает от аккумуляторной батареи 84 В и плавно контролирует скорость двигателя.
Но чтобы протестировать этот регулятор скорости под нагрузкой, мастеру необходимо закончить свой велосипедный проект и смонтировать все компоненты вместе.
Также вы можете посмотреть видео по сборке данного контроллера:
Источник



