
- Как начать делать блок управления автодвигателем с нуля
- МозгоЧины
- Как сделать контроллер мотора на основе МОП-транзистора
- Как сделать контроллер мотора на основе МОП-транзистора
- Шаг 1: Инструменты и материалы
- Шаг 2: Компоновка деталей
- Шаг 3: Пайка
- Шаг 4:Обрезка платы
- Шаг 5: Доработка
- Шаг 6: Контроллер готов, используем его!
- Двигатель и контроллер для электросамоката своими руками
Как начать делать блок управления автодвигателем с нуля
Примерно год назад я начал разрабатывать блок управления автомобильным двигателем с нуля.
Позвольте рассказать, почему эта идея до сих пор кажется мне реалистичной.
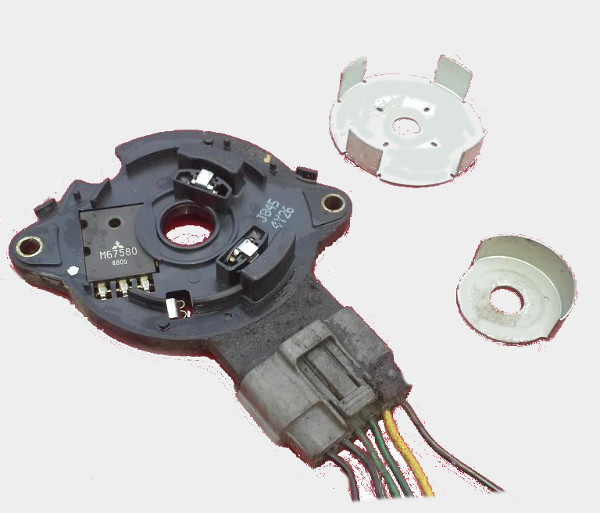
Итак, старенькая Киа Прайд. Под капотом у неё есть вот такая штука, к которой подходит десяток проводов — это распределитель зажигания, в корпус которого заодно встроены датчики положения распредвала и катушка зажигания.

Нас для начала интересуют датчики положения вала. Если мы начнём этот распределитель немного разбирать, внутри мы увидим:

Если поразбирать еще немного, то мы увидим и внутреннее колесо, и сами датчики.
Эти два жестяных колеса сидят на валу, вращаются вместе с ним — и, о чудо, формируют в двух торчащих наружу проводах вот такой очень простой сигнал:

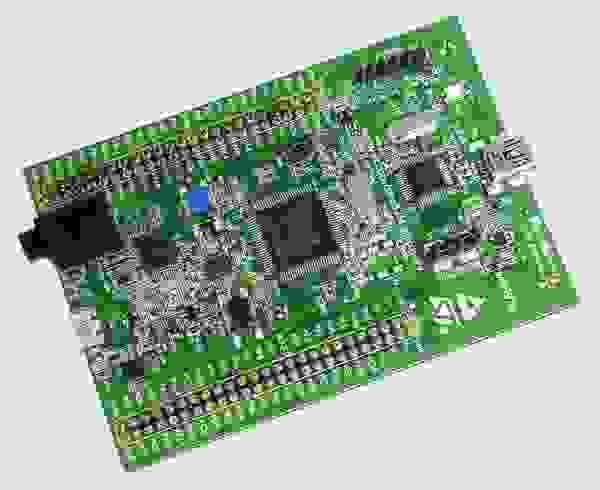
На этом наше везение не заканчивается: хотя мы и знаем, что аккумулятор в автомобиле обычно двенадцативольтовый — сигнальная электроника работает обычно на пяти вольтах! А это значит, что этот сигнал можно вот абсолютно как он есть подключить к например stm32f4discovery — это такая плата с микроконтроллером, в которой цена менее тысячи рублей сочетается с 32ых битным процессором частотой 168 МГц и даже арифметическим сопроцессором.
Если решить программировать это чудо с использованием ChibiOS/RT, хотя бы для упрощения интерфейсов работы с периферией, то вот таким несложным кодом мы получим в консоль работающий тахометр.
По-моему, достаточно просто. Но, всё-таки одно дело — считать что-то с датчиков, и совсем другое дело — сгенерировать какой-то управляющий сигнал.
Давайте разберёмся, как же управляются форсунки?
Чтоб не экспериментировать сразу же с большим и железным двигателем, продолжим пока только с оригинальным блоком управления — даже если мы его хотим заменить на свою плату со своим кодом, всё равно будет полезно собрать побольше информации. Например, будет полезно
собрать информацию о ширине управляющего форсунками сигнала в зависимости от оборотов двигателя.
Итак, берём блок управления и кладём его на стол.
Аккумулятор у нас в машине на 12 вольт? так и старый ATX блок питания — тоже на 12 вольт, его и используем для питания блока управления на время экспериментов.

Когда мы подключались к автомобильной проводке, мы видели там пятивольтовый сигнал — но сам датчик положения коленвала работает как открытый коллектор — т.е. провод датчика либо заземлён, либо ни к чему не подключён. Чтоб эмулировать такой датчик, нам будет нужен транзистор.

И немного кода для генерации сигнала.
Форсунки впрыска топлива управляются заземлением идущего к ним от блока управления провода. Чтоб интерпретировать такой сигнал от лежащего на столе блока, нам понадобятся один диод и один резистор:
Соберём это всё и запустим. И, опять чудо! Стандартный блок управления нам поверил, и на основании всего лишь одного эмулированного датчика — датчика положения распредвала — начал пытаться управлять форсунками!

На самом деле, для получения осмысленной таблицы подачи топлива нам нужно будет начать эмулировать еще и датчик расхода воздуха. Когда мы начнём управлять настоящими форсунками, нам уже не хватит простого транзистора для заземления этого примерно одноамперного соленоида — но всё это детали. Главное — сделать блок управления двигателем с нуля кажется реальным — так что я продолжаю этим заниматься.
Источник
Сайт про изобретения своими руками
МозгоЧины
Сайт про изобретения своими руками
Как сделать контроллер мотора на основе МОП-транзистора
Как сделать контроллер мотора на основе МОП-транзистора

Приветствую, мозгоизобретатели! Сегодня собираем своими руками полезную вещь — контроллер мотора, который может пригодиться при создании множества самоделок, использующих двигатель под управлением микроконтроллера.
Данная поделка проста по конструкции, может быть использована в качестве электронного контроллера скорости (ESC), и имеет прямое и обратное управление. Спектр ее применения от робототехники, устройств дистанционного управления, портативного транспорта, до других разнообразных проектов, использующих моторы.
Поделка-контроллер состоит из минимума деталей и миниатюрна по размерам, что дает ей возможность легко помещаться в ваши мозгопроекты. Схема контроллера основана на схеме «управления большими нагрузками» из моих предыдущих проектов и содержит только один МОП-транзистор и диод. Это позволяет микроконтроллеру управлять скоростью мотора. А для возможности обратного управления я добавил DPDT реле, еще один МОП-транзистор и диодную пару для контроля смены полярности.
Думаю, что это мозгоруководство будет вам интересно!
Шаг 1: Инструменты и материалы
Как говорилось, эта поделка проста и использует минимум деталей:
- макетная плата — используйте любую вам доступную
- тонкий провод — я взял одиночный 24 калибра
- МОП-ранзистор — 2шт.- я использовал IRF510, но сгодится и любой эквивалентный, например, NTE2382
- DPDT реле 30В — на фото показана не та реле
- выпрямляющий диод — 2шт.
- штырьковые разъемы — лучше взять те, которые можно «отломать» на нужное количество штырьков.
А еще понадобятся некоторые инструменты:
- паяльник и припой
- клеевой пистолет
- изоляционные кусачки
- дремель или что-то подобное для обрезки макетной платы
Шаг 2: Компоновка деталей
На макетную плату помещаем все мозгодетали, причем таким образом, чтобы можно было легко их спаять согласно схеме при наименьших габаритах. От штырьковой полосы отделяем кусочек с 2-мя контактами и кусок с 4-мя контактами (если вы планируете припаять контакты двигателя непосредственно к плате, то 2-х штырьковый разъем не понадобится). На 2-х контактном отрезке укорачиваем штырьки с обоих сторон, а на 4-х контактном загибаем под углом 90 градусов штырьки одной стороны с помощью изоляционных кусачек, либо другого подходящего инструмента.
Шаг 3: Пайка
После того, как детали размещены на плате, проводим пайку согласно схеме представленной выше, и используем для этого любые удобные вам паяльник и припой. В качестве дорожек используйте кусочки провода, для близко стоящих контактов — не изолированные отрезки провода, а для далеко стоящих — изолированные перемычки, зачищенные с обоих концов. Омедненая макетная мозгоплата конечно лучше подойдет для наших целей, но обычная плата дешевле. Так же на этом этапе можно припаять провода мотора или как я, 2-х штырьковый разъем.
Шаг 4:Обрезка платы
Собранную поделку нужно вырезать из листа макетной платы, это позволит использовать ее в небольших устройствах, таких как контроллеры или роботы. Свою я обрезал по минимуму, но вы можете сделать это до необходимых вам размеров и использовать согласно вашим мозгозадумкам. Просто не повредите работоспособность контроллера-самоделки, не нарушайте контактов и дорожек. Используйте для обрезки дремель или небольшую пилку, для меня бормашинка была наиболее удобным вариантом, но вы действуйте по своему усмотрению. И в заключение этого этапа убедитесь в совместимости контактов поделки с другими платами или разъемами.
Шаг 5: Доработка
Осталось добавить несколько штрихов и «защитить» мозгоподелку. Изоляционными кусачками обрезаем торчащие концы проводков, при этом не повреждая целостность схемы. Можно использовать для этих целей и плоскогубцы, раскачивая в стороны проводки пока они не обломятся. Затем зигзагообразными покрываем плату горячим клеем, тем самым защищаем ее от возможного замыкания и повреждений, получится должно примерно как на фото.
Шаг 6: Контроллер готов, используем его!
Самоделка собрана, можно интегрировать ее в другие проекты, но перед этим не мешает разобраться с контактами. Если вы следовали моим мозгоинструкциям, то назначение контактов как на фото, если компоновка ваших деталей отличается, то смотрите схему и выявляйте вашу распиновку.
Подключение к микроконтроллеру:
- Подключаем мотор к контроллеру мотора через соответствующий разъем.
- Вставляем контроллер мотора в макетную плату.
- С помощью разноцветных проводов соединяем Vin поделки с Vin микроконтроллера, GND с GND микроконтроллера.
- Используя еще два провода соединяем контакты «speed» и «reverse» контроллера мотора с двумя контактами микроконтроллера по вашему усмотрению.
- Запрограммируйте микроконтроллер.
- Не превышайте напряжение 30В на Vin.
- Не путайте контакты.
- Если вы используете напряжение выше 15В на Vin, то подключите Vin и GND непосредственно к источнику питания, и заземлите микроконтроллер, соединив его GND и GND источника питания.
- При работе с большими мощностями на МОП-транзистор установите радиатор.
- Применяйте только двухконтактые моторы постоянного тока.На этом все, благодарю за мозговнимание!
( Специально для МозгоЧинов #DIY-MOSFET-Motor-Controller
Источник
Двигатель и контроллер для электросамоката своими руками
В этой статье я расскажу как в домашних условиях сделать мощный двигатель для самоката или детского электромобиля с высоким КПД и простой контроллер к нему.
Вот что в итоге получилось: двигатель описанный в статье ниже без изменений, добавил регулируемый источник питания и курок газа, маленькая батарея в сумочке на руле 8S1P 2,5 А·ч (быстро заменяемая, можно брать несколько с собой, одной такой батареи хватает на 9-12км на средней скорости)

Расход батареи зависит от скорости, прилагаю таблицу расхода энергии для моего веса 85 кг:
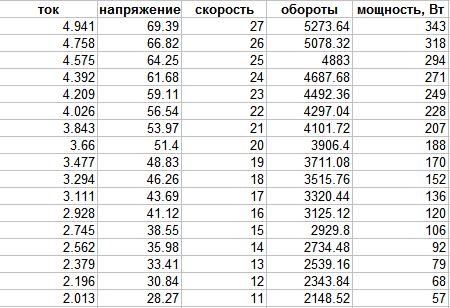
Контроллер сейчас полный мост 4 транзистора IRFB4110 установленных без радиаторов, регулируемый источник питания выдает на этот мост напряжение от 25 до 70В при 24-33В на входе с кпд более 93%. Общий кпд системы получился на уровне 80-85% (включая потери на батарее проводах контроллере и двигателе).
Samsung INR18650-25R = 87 Вт/час (42В максимум с отводом от середины, 2.5 А/ч) мне полного заряда хватает на
15 км по ровной дороге.
Изначально использовался 1 датчик холла (но я уже тогда знал что это большие потери так как делал такие двигатели и раньше), так двигатель на холостом ходу потреблял 42 Вт (1 А на каждую половину батареи, итого 2*21 или 1*42) и за 2 минуты нагревался до 50 градусов (это без нагрузки), установка 2х датчиков холла снизила ток холостого хода в 10 раз! и он составил 100 мА (4,2 Вт) и греться он перестал. На максимальной нагрузке (езда в горку) ток достигал 6 ампер (>250 Вт) и обмотка разогревалась так что больше пары минут нельзя было ездить а после установки 2х датчиков холла и подачи питания на обмотки только в нужные моменты, согласно рисунку выше, полностью решило проблему перегрева (значительно подняло кпд) и ток при заезде на ту же горку упал в 2 раза (130 Вт)
И так магниты с катушками запакованы в корпус, вал (болт М6 100мм на котором гайками с бортиком, зажимные для колес, через шайбу и резиновую прокладку зафиксирован магнит) закреплен в немагнитных стальных подшипниках (это в идеале, но я использовал обычные дешевые стальные но сила магнитного поля такая что крутятся они с трудом, поэтому лучше сразу нержавейку ставить) и самое главное как его теперь запустить. Я использовал самый простой вариант одна катушка и один магнит — самый дешевый вариант и для самоката подходит идеально, естественно так как запитываем только 90 — 120 градусов сектор на такт то остается незаполненные тягой сектора и стартовать такой двигатель будет с толчка, но это же не вентилятор а двигатель для самоката, оттолкнулся, включил двигатель и поехал, все просто. Если же нужен автопуск то минимум нужно делать 2х фазный 4х тактный, такой поставил в детском автомобиле.
Контроллер
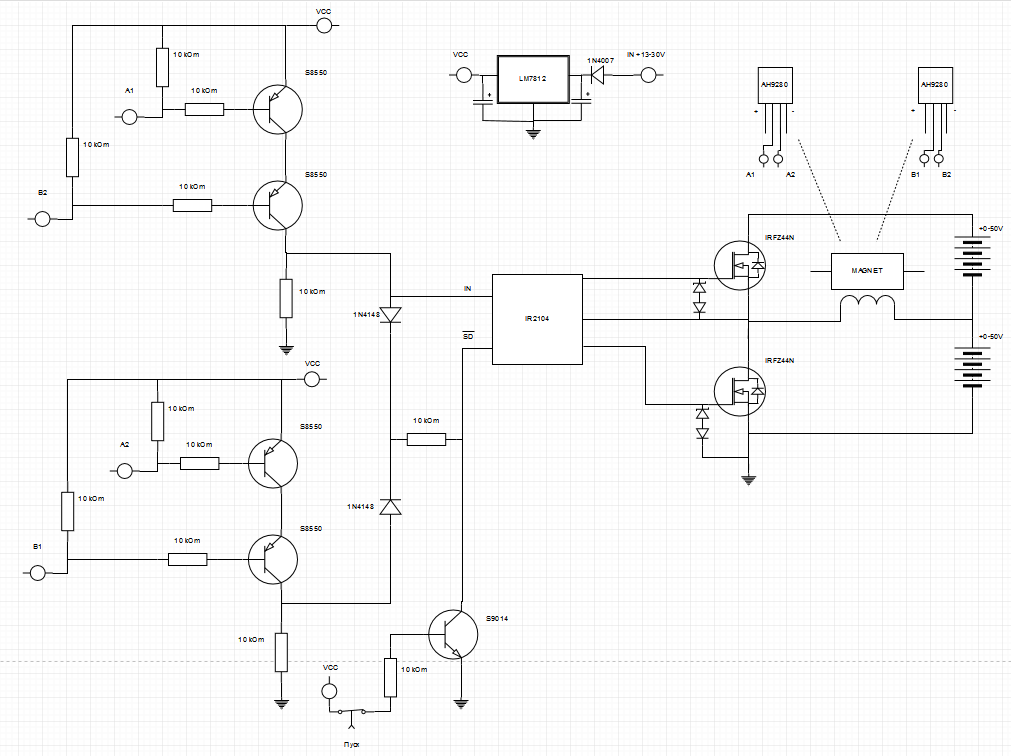
Фраза «шим регуляция» у меня ассоциируется с потерями, запитывать нужно постоянным током чтобы избежать потерь переключения на ключах и не греть диоды в ключах, в общем контроллер может работать с кпд 97% и выше если забыть про шим, а скорость лучше регулировать напряжением питания (например у меня в самокате она фиксированная 13 — 18 км/ч в зависимости от веса ездока). Запитка обмотки двумя тактами возможна или мостом но тогда потери всегда на 2х ключах или полумостом с питанием с отводом от средней точки, выбран именно такой вариант так как в 2 раза уменьшает потери на ключах (всегда катушка включена только через 1 ключ). Еще из плюсов такого полумоста то что обратная эдс при отключении катушки сливается через 1 диод в противоположное плечо и потери на диодах тоже в 2 раза меньше то-есть больше энергии вернется в конденсатор / аккумулятор так же и с рекуперации от скатывания с горки. В итоге получаем полумост + драйвер полумоста + схема управления.
Схема управления
Использование одного датчика хола не дает возможность управлять углом в котором запитывается обмотка, поэтому нужно минимум 2 датчика расположенные таким образом чтоб получать включение обмоток в нужном диапазоне, проще всего сделать угол 90 град (для этого нужно разнести датчики на 45 градусов от витков катушки в обе стороны) тогда пары датчиков хватит на 4 такта (используем только 2 из них для однофазного) . Каждый датчик возвращает 2 позиции которые означают видит ли он северный или южный полюс, так вот когда оба видят северный включаем один ключ, когда оба видят южный второй, при использовании микросхем от куллера — реализуется логикой 2или-не, на входы двух логических элементов подается питание через сопротивления на выходах при этом 0, микросхемы куллера коммутируют входы логических элементов на ноль, когда оба входа на нуле на выходе 1 — включается 1 ключ, и так же когда на втором логическом элементе оба входа на нуле включается другой ключ. Все просто. Учитывайте при выборе микросхемы драйвера куллера (датчик холла) что они есть с защитой от остановки и без, для двигателя поддержки как у меня на самокате лучше использовать с защитой он запустится только при начале езды, но для двигателя который должен стартовать сам нужно выбирать без защиты и делать ее если необходима другим способом (защита от перегрузки по току например).
Микросхем логики у меня не было потому заменил транзисторами. Схема подключения драйвера мосфетов по даташиту.
Отладка двигателя
Хочу отметить важные моменты которые уберегут детали контроллера от случайного выжигания. Дело в том что обратная эдс с катушки очень коварная штука, она может спалить всю электронику и драйвер и микросхемы с датчиком холла. Для предотвращения таких ситуаций обязательно должны стоять конденсаторы по входу питания в которые сливается обратная эдс с катушки (через защитные диоды в мосфетах) при случайном отключении батареи, минимум 1000 мкф 50В с низким esr. Также для предотвращения попадания выбросов высокого напряжения на выход драйвера через обратную емкость мосфета, обязательно в цепи затвор исток должен стоять стабилитрон на 13-15В (что ниже допустимого напряжения затвора 20В но выше управляющего напряжения с драйвера 12В).
При первом включении обмотку лучше подключать через сопротивление ограничивающее максимальный ток (10-50 Ом), переворотом датчиков холла добиваемся вращения в нужную сторону. Также перемещая датчики можно найти позиции где потребление на холостом ходу будет минимальным и работа двигателя тихой. Сильно уменьшать угол запитки не стоит ( Samsung INR18650-25R = 38$
Итого, электрификация самоката обошлась в
Плюсы и минусы
Плюсы:
- двигатель вращается без какого либо сопротивления, что не мешает поездке на самокате как на обычном при отключенном питании
- малый вес
- цена
- высокая эффективность
Минусы:
- нельзя устанавливать такой двигатель вблизи магнитных материалов (приведет к залипанию ротора, использование в корпусе железных болтов тоже недопустимо, только нержавейка или клей)
- нельзя устанавливать очень близко с массивными токопроводящими материалами (торможение вихревыми токами, идеально использовать раму из пластика, дерева, карбона тогда можно ставить где угодно)
- придумайте и напишите в комментариях (низкая скорость не катит, можно поднять напряжение, меня устраивает скорость для езды по пешеходным дорожкам)
Больше фото
Прижатие ремня для большего сцепления с зубчатым колесом

Первые включения (еще с 1 датчиком холла и пониженным напряжением питания 2х8В) максимальная скорость 3-5 км/ч

Настройка положения датчиков (катаемся, меряем потребление, переклеиваем датчик холла ищем оптимальный вариант) на фото оптимальный
Источник



