
ШИМ регулятор оборотов: схема модуля управления мотором
![]()
ШИМ регулятор оборотов двигателя постоянного тока проще всего организовать с помощью ШИМ регулятора. ШИМ — это широтно-импульсная модуляция, в английском языке это называется PWM — Pulse Width Modulation. Теорию я подробно объяснять не буду, информации полно в интернете.
ШИМ регулятор оборотов электродвигателя постоянного тока рассчитанного на напряжение 12 В
Своими словами — если у нас есть двигатель постоянного тока на 12 вольт — то мы можем регулировать обороты двигателя изменяя напряжение питания. Изменяя напряжение питания от нуля до 12 вольт будут изменятся обороты двигателя от нуля до максимальных. В случае с ШИМ регулятором мы будем изменять скважность импульсов от 0 до 100% и это будет эквивалентно изменению напряжения питания двигателя и соответственно будут изменятся обороты двигателя.
![]()
Рассмотрим первый ШИМ регулятор на 5 ампер. Есть такая самая любимая микросхема всех радиолюбителей — это таймер NE555 ( или советский аналог КР1006ВИ). Вот на этой микросхеме и собран ШИМ регулятор. Кроме таймера здесь я использую стабилизатор на 9 вольт LM7809, мощный полевой транзистор с N-каналом IRF540, сдвоенный диод Шоттки, а также другие мелкие детали. Схема по которой собран этот регулятор всем известна и очень популярна.
![]()
![]()
Печатку этой платы можно скачать — ШИМ 5A
В более мощном исполнении я применяю просто параллельное включение нескольких полевых транзисторов IRF540 и более мощный сдвоенный диод Шоттки. В остальном всё аналогично.
![]()
![]()
![]()
Печатку этой платы можно скачать — ШИМ 10A
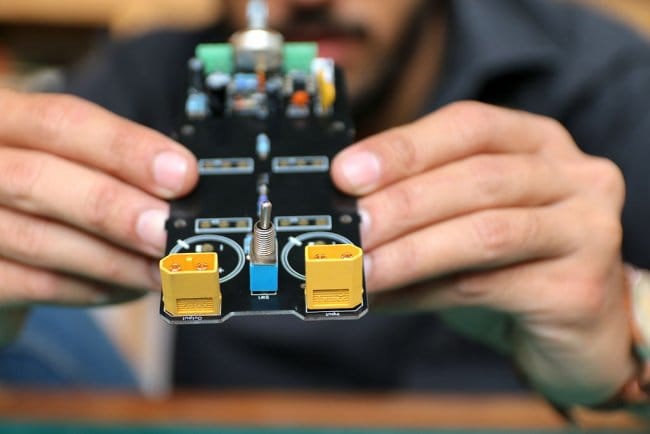
Подключение ШИМ регулятора очень простое. Вы видите 4 клеммы — две клеммы для подачи питания (+) и (-), и две клеммы для подключения мотора (M+) и (M-).
Сделал еще ШИМ регулятор с защитой по току. Для этих целей использовал распространенный операционный усилитель LM358 и два оптрона PC817. При превышении тока, который мы задаем подстроечником R12, срабатывает триггер-защелка на операционнике DA3.1, оптронах DA4 и DA5 и блокируется генерация импульсов по 5 ноге таймера NE555. Чтобы снова запустить генерацию нужно кратковременно снять питание со схемы с помощью кнопки S1.
![]()
![]()
Печатку этой платы можно скачать — ШИМ 10А с защитой
ШИМ регуляторы все работоспособны, проверил их работу с помощью двигателя от шуруповерта.
ШИМ регулятор оборотов
Источник
Регулятор оборотов коллекторного микроэлектродвигателя для РУ модели
Желание собрать радиоуправление у меня созрело достаточно давно. Но дальше поиска схем, с последующим пониманием, что прошивку автор не даст, дело не продвинулось. В итоге, затея была похоронена в стадии развития. Но недавно мне на глаза попались модули, именуемые NRF24L01+ (стоит 0.6$ на Ali), и уже позабытое желание собрать радиоуправление загорелось с новой силой.
В конечном счете, была разработана схема радиоуправления, а так же несколько сопутствующих устройств. Об одном из них и пойдет речь в данной статье. К слову, в следующих статьях будет описано само радиоуправление, а так же зарядное устройство для li-ion аккумуляторов.
Регулятор оборотов двигателя — это название слышал любой моделист, а в особенности те, кто собирал авиа- и судомодели. Это устройство незаменимо, так как оно обеспечивает плавное управление скорость двигателя.
Существует множество вариантов исполнения таких регуляторов: на микроконтроллерах, на жесткой логике и даже на дискретных компонентах. После просмотра уже готовых схем, я понял что придется делать что-то свое — на логике собирать не хотелось, на дискретных компонентах выходило уж очень громоздко. Найденные схемы на микроконтроллерах были в общем-то неплохими, да вот только вариант собирать то, принцип действия чего я не смогу объяснить, меня не привлекал (а прошивку авторы выкладывать не спешили).
После всего этого и была разработана и собрана схема.
Итак, краткие характеристики (при номиналах деталей, указанных на схеме):
- Диапазон питающих напряжений: 7 . 35В
- Максимальный ток: 3А
- Длительность управляющего импульса: 1 . 2мс
- Рекомендованный период импульсов: 20мс
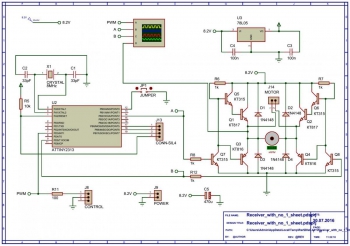
Силовая часть представляет собой Н-мост с дополнительными маломощными управляющими транзисторами. Управление оборотами двигателя производится ШИМ сигналом, генерируемым МК. Скважность ШИМ зависит от длительности импульса, поступающего на вход устройства.
Обработку сигналов и управление транзисторами в этой схеме выполняет микроконтроллер ATtiny2313. Этот выбор ничем не обусловлен, кроме того, что он у меня валялся под рукой на момент проектировки устройства. Изначально, в схеме планировалось использование полевых транзисторов, но позже я от них отказался в пользу более доступных советских биполярников (которых практически у каждого целый ящик). Конечно, это наложило свой отпечаток на параметры: максимальный ток значительно снизился, как и цена девайса.
Как уже упоминалось, напряжение питания устройства может варьироваться от 6 до 30 вольт. Это обусловлено границами напряжения, которое может выдержать интегральный стабилизатор LM7805, а так же двигатель (на него подается напряжение, отличное от питающего примерно на 1 вольт).
Максимальный ток зависит от применяемых транзисторов. В моем варианте — это КТ816/817, максимальный ток коллектора которых равен трем амперам.
В качестве маломощных управляющих транзисторов использованы распространенные КТ315.
Для более точного измерения длительности управляющего (серво) импульса был применен кварцевый резонатор на частоту 8МГц.
Диоды D1 — D4 желательно монтировать. Будет работать и без них, но вопрос в том, как долго.
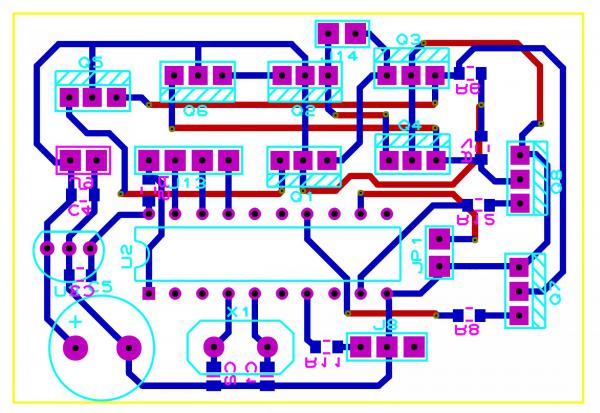
Печатная плата устройства выполнена на одностороннем фольгированном материале (стеклотекстолит, гетинакс). Дорожки выделенные красным — перемычки с лицевой стороны. В моем варианте транзисторы монтируются вне платы на радиаторе.
Печатная плата устройства (синие проводники — обратная сторона):
Принцип работы
При получении импульса, запускается 16 битный таймер, который останавливается по спаду импульса. Таймер настроен таким образом, что каждый его такт — это 1мкс, что позволяет упростить вычисления. После определения длительности импульса происходит сравнение с заданной величиной. Результат записывается в регистр OCR1A/B в зависимости от положения джампера и длительности импульса.
Исходный код приведен ниже. Так же его можно взять в приложении к статье.
В наладке устройство не нуждается, и должно работать сразу после правильной сборки и прошивки микроконтроллера. С последним будьте осторожны — не отключите ненароком бит RSTDISBL. Это может стоить вам нового микроконтроллера (если у вас конечно нет параллельного программатора).
Транзисторы КТ315 можно заменить любыми маломощными кремниевыми транзисторами структуры n-p-n. КТ816/817 — аналогичными по параметрам (или более мощными). К примеру, КТ818/819 и т.д. Резисторы можно заменить на аналогичные по мощности с допуском 20-30% от номинального сопротивления. Линейный стабилизатор LM7805 можно заменить на отечественный аналог КРЕН5А, а так же применить импульсный стабилизатор, но придется переработать печатную плату.
Фото , а так же видео работы устройства можно увидеть ниже.



Извиняюсь за не очень презентабельный вид платы — изначально это был тестовый вариант «на первое время». Но так как устройство с первого раза заработало так как от него требовалось, то «временный вариант» перерос в постоянный.
Источник
ШИМ-регулятор скорости для самодельного электровелосипеда







Ранее мастер работал над преобразованием своего велосипеда в электрический, используя двигатель постоянного тока для автоматического механизма двери. Также им была создана аккумуляторная батарея, рассчитанная на 84 В постоянного тока.
Теперь ему требуется регулятор скорости, который может ограничивать количество энергии, подводимой к двигателю от аккумуляторной батареи. Большинство доступных в сети регуляторов скорости не рассчитаны на такое высокое напряжение, поэтому было решено сделать его самому.
В данном проекте будет спроектирован и построен индивидуальный ШИМ-регулятор скорости для управления скоростью крупномасштабных двигателей постоянного тока.
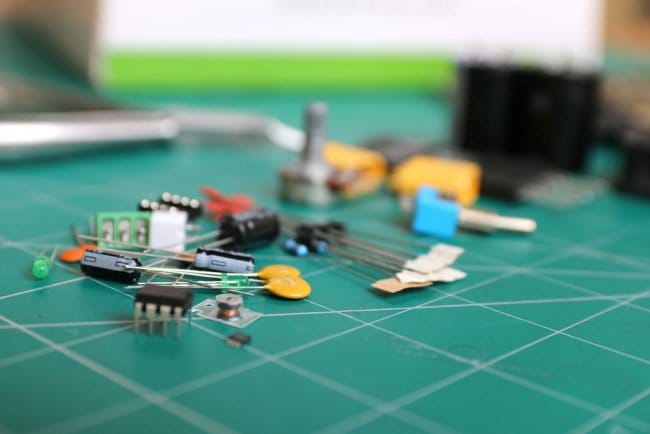
Шаг 1: Инструменты и материалы
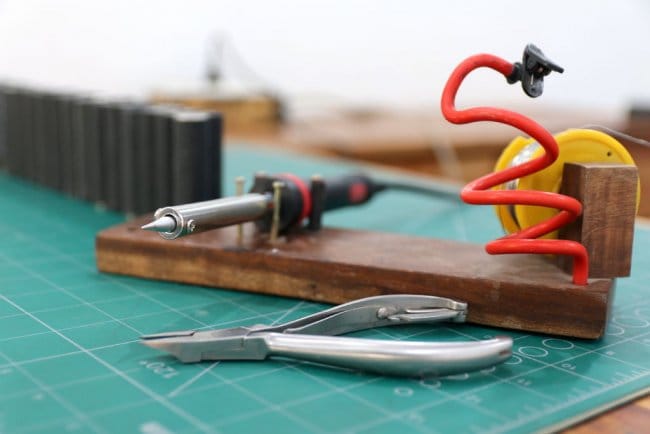




Для этого проекта понадобятся базовые инструменты для пайки, такие как:
— Паяльник;
— отсос припоя;
— Плоскогубцы;
Схема, файлы Gerber и список компонентов доступны здесь .
Шаг 2: Проектирование контроллера скорости

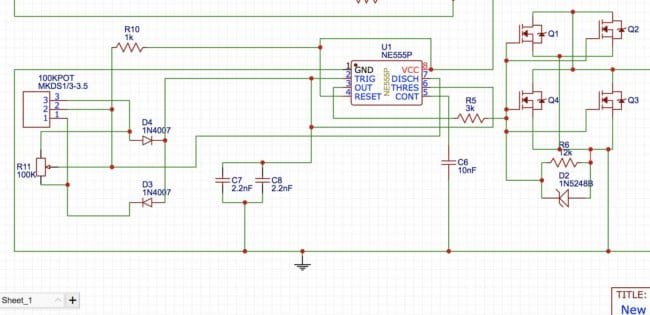

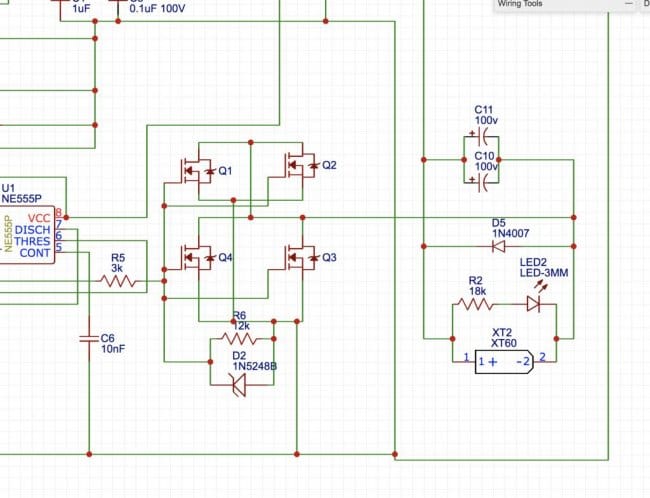
Так как мы стремимся контролировать скорость двигателя постоянного тока, то мы можем использовать две технологии. Понижающий преобразователь, который понижает входное напряжение, довольно сложен, поэтому было решено использовать PWM Control (Pulse Width Modulation). Подход прост, чтобы контролировать скорость питания батареи, он включается и выключается с высокой частотой. Для изменения скорости движения велосипеда изменяется рабочий цикл или период времени выключения контроллера.
В настоящее время механические переключатели не должны подвергаться такому высокому напряжению, поэтому подходящим выбором для такого применения является N-канальный Mosfet, который специально предназначен для обработки умеренного количества тока на высокой частоте.
Для переключения полушарий необходим сигнал ШИМ, который вырабатывается ИС таймером 555, а рабочий цикл сигнала переключения изменяется с помощью потенциометра 100 кОм.
Так как мы не можем работать с таймером 555 выше 15 В, придется включить интегральную микросхему преобразователя lm5008, которая понижает входное напряжение с 84 В до 10 В постоянного тока, который используется для питания таймера и охлаждающего вентилятора.
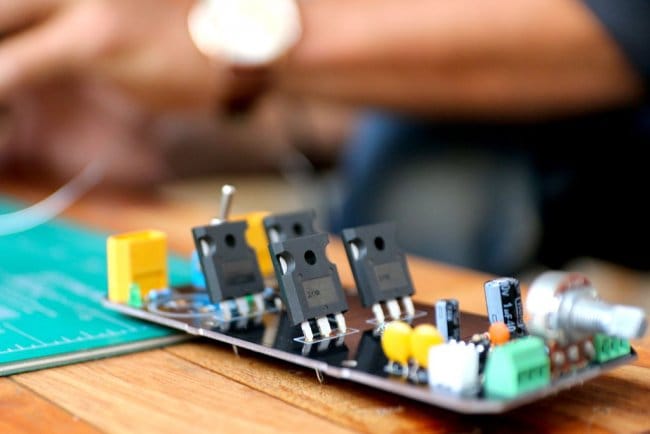
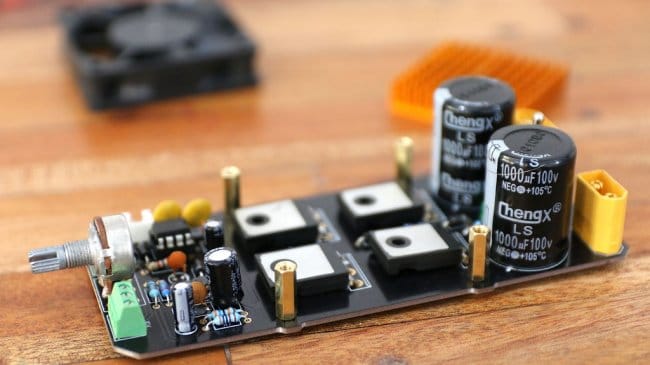
Для обработки большого количества тока было использовано четыре N-канальных Mosfets, которые подключены параллельно.
Кроме того, были добавлены все дополнительные компоненты, как описано в таблицах данных.
Шаг 3: Проектирование печатных плат

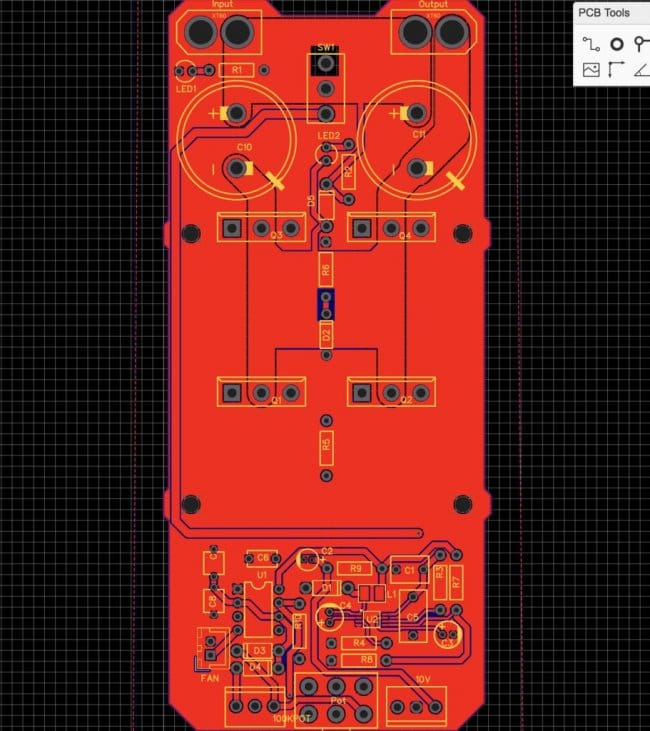

Закончив схему, было решено заняться разработкой специальной печатной платы для регулятора скорости. Было решено спроектировать это устройство так, чтобы оно было способно к дальнейшим модификациям для других DIY-проектов мастера, которые используют большие двигатели постоянного тока.
Идея проектирования печатной платы, возможно, требует больших усилий, но оно того стоит. Всегда старайтесь проектировать определенные модули на плате с другой стороны. К таким модулям относятся схема управления и питание. Это делается для того, чтобы при соединении всего вместе можно было выбирать подходящую ширину печатной дорожки, особенно на стороне питания.
Также было добавлено четыре монтажных отверстия, которые будут полезны для монтажа контроллера и удержания вентилятора вместе с радиатором над полевыми МОП-транзисторами.
Шаг 4: Заказ печатных плат



В отличие от любой другой заказной детали для DIY-проекта, печатные платы, безусловно, самые легкие. Как только файлы Gerber для окончательной компоновки печатной платы были готовы, осталось сделать несколько кликов для заказа специализированных печатных плат.
Все, что сделал мастер этого проекта, так это отправился на PCBWAY и загрузил свои файлы Gerber. После того, как их техническая команда проверит дизайн на наличие ошибок, дизайн будет отправлен на производственную линию. Весь процесс займет два дня и печатные платы придут по указанному адресу в течение недели.
Файлы Gerber, схема и спецификация для печатной платы регулятора скорости доступны здесь .
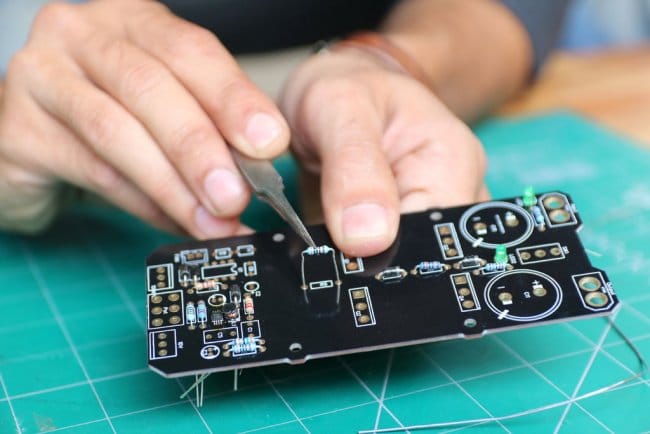
Шаг 5: Сборка печатных плат














Как и ожидалось, печатные платы прибыли в течение недели. Качество печатных плат абсолютно безупречное. Пришло время собрать все компоненты, как указано в спецификации, и поместить их на место.
Чтобы все шло гладко, нужно начать с самого маленького компонента на печатной плате, который в нашем случае является преобразователем LM5008 Buck, компонентом SMP. Как только компоненты были припаяны, согласно схемы, мастер приступил к работе с более крупными компонентами.
После сборки платы, пришло время расположить таймер 555 с выемкой в правильном направлении.
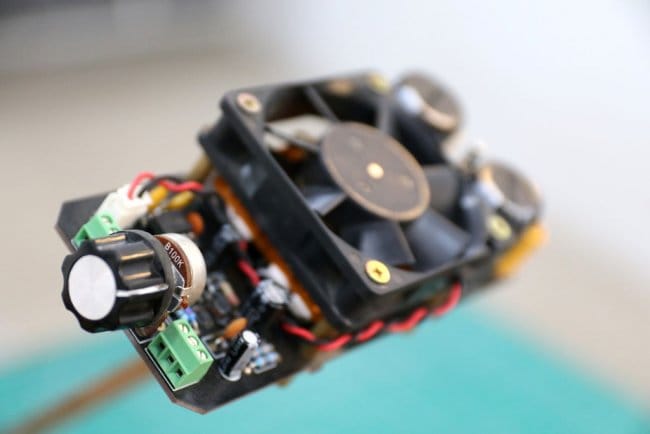
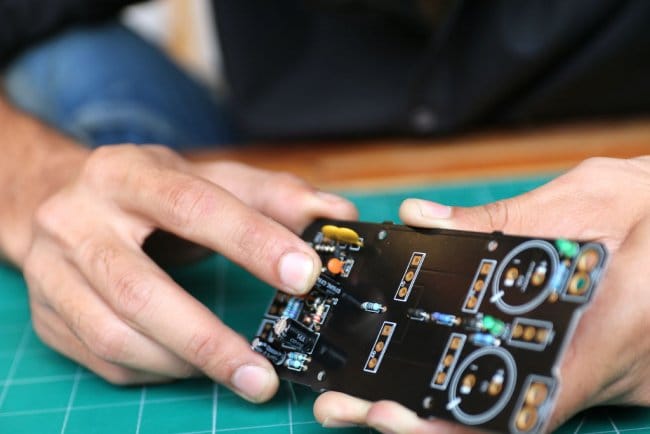
Шаг 6: Охлаждение

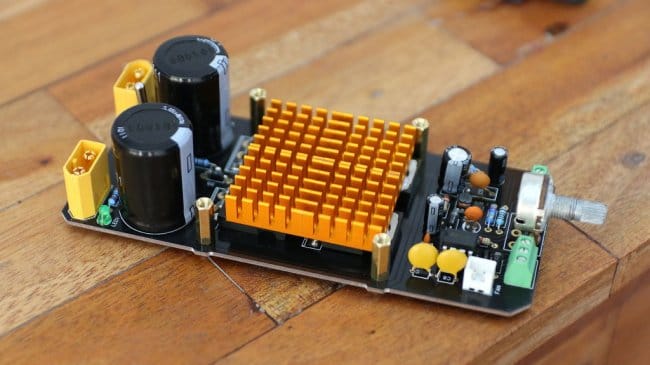

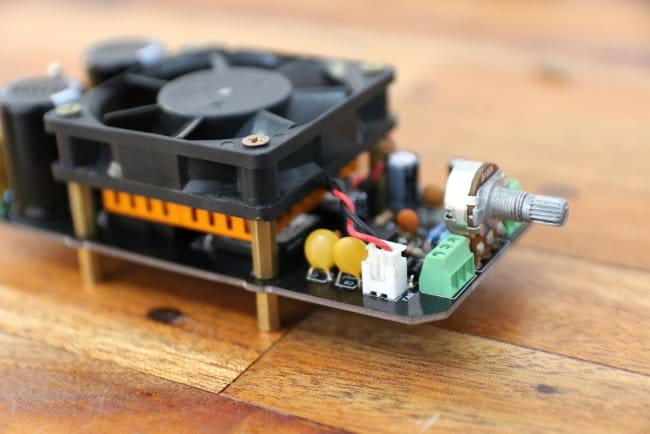

С таким огромным количеством энергии, с которым потребуется иметь дело, очевидно, что плата будет нагреваться. Поэтому, чтобы справиться с избытком тепла, необходимо согнуть полевые МОП-транзисторы и установить вентилятор на 12 В с переключателем между радиаторами.
После этого ШИМ-регулятор скорости готов к работе.
Шаг 7: Тестирование контроллера




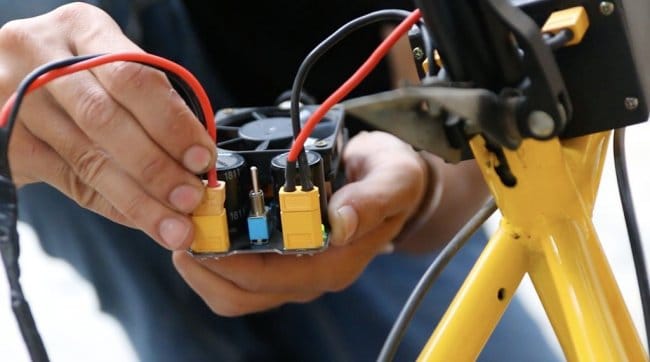


Для тестирования контроллера будет использована аккумуляторная батарея на 84 В для электрического велосипеда, которая была изготовлена мастером ранее. Контроллер временно подключен к аккумуляторной батарее и мотору, который прикреплен к велосипеду для привода заднего колеса.
После переключения переключателя, контроллер включается и вентилятор обдувает воздухом полевые МОП-транзисторы. При вращении потенциометра по часовой стрелке, двигатель начинает вращаться и постепенно увеличивает скорость, пропорционально вращению ручки.
Шаг 8: Окончательные результаты



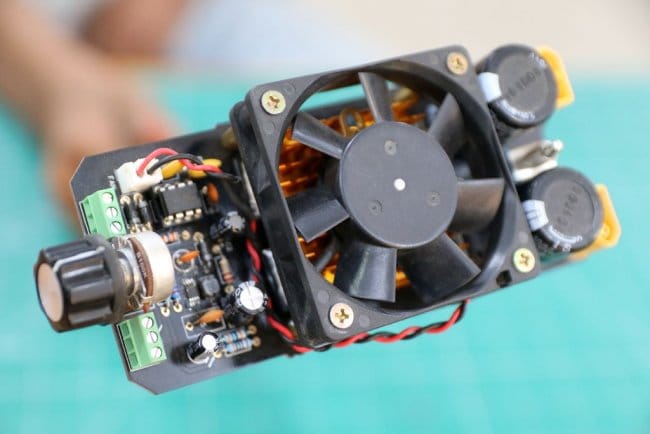



Регулятор скорости готов и он превзошел все ожидания мастера в отношении его возможностей. Контроллер легко работает от аккумуляторной батареи 84 В и плавно контролирует скорость двигателя.
Но чтобы протестировать этот регулятор скорости под нагрузкой, мастеру необходимо закончить свой велосипедный проект и смонтировать все компоненты вместе.
Также вы можете посмотреть видео по сборке данного контроллера:
Источник



