
Как сделать регулятор оборотов коллекторного двигателя?
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.

Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения. Особенно вас должны интересовать схемы, которые работают без потери мощности
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство

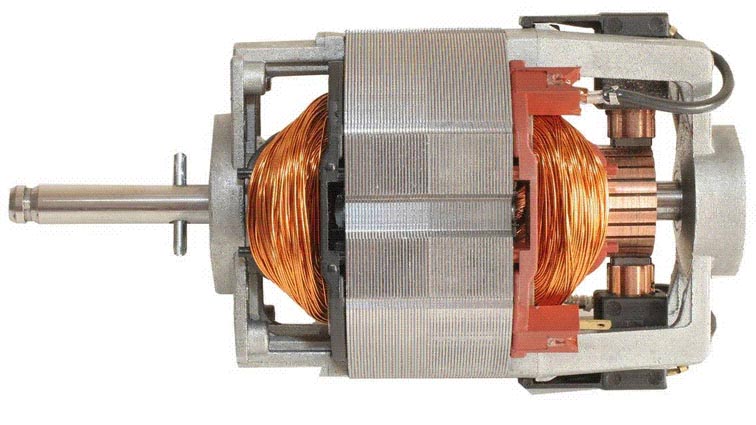
Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
 Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки, используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).
- Кнопки, используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через симисторы в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:

Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:

На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:


При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.
- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы могут существенно различаться.
Большей частью они находятся в диапазоне примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор оборотов KA-18 ESC, предназначенный для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор оборотов MEGA коллекторный (влагозащищенный). Стоит 3605 рублей.
- Регулятор оборотов для моделей LaTrax 1:18. Его цена 5690 рублей.
Источник
Управление двигателями постоянного тока. Часть 1
Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения

Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа – это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор – коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к [1].
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
| |||||
| Рисунок 1. | Коллекторный двигатель с редуктором (а) и типовая конструкция коллекторного двигателя (б). | ||||

Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, LM317 [2]. Возможные варианты такой схемы представлены на Рисунке 2.
| |||||
| Рисунок 2. | Схемы управления маломощным коллекторным двигателем на базе ИМС LM317. | ||||
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как RLIM. Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором – минимальную. Что выбрать – зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию [2]; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением VIN и выходным VOUT, равной 3 В, будет рассеиваться мощность не менее
Таким образом, нужен радиатор. Опять вопрос – на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
 | |
| Рисунок 3. | График зависимости мощности, рассеиваемой на ИМС регулятора, от выходного напряжения. |
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения – использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть – подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где: τ – длительность импульса, а T – период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на Рисунке 4 [3]. Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
 | |
| Рисунок 4. | «Классическая» схема управления коллекторным двигателем на основе ШИМ (согласно оригиналу [3]). |
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
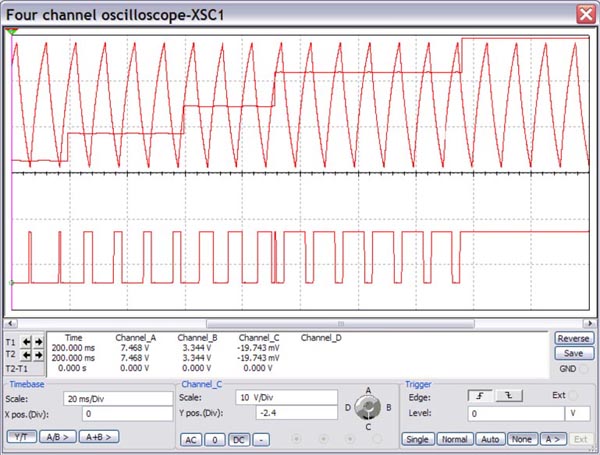 | |
| Рисунок 5. | Диаграмма управления коллекторным двигателем на основе ШИМ. Верхняя трасса – напряжение на конденсаторе С1; средняя (пересекает верхнюю) – сигнал управления (напряжение на движке резистора RV2); нижняя – напряжение на двигателе. |
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа BUZ11 [4]. Особенности этого транзистора типа MOSFET – большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов – это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании Pro’sKit, применен транзистор TIP125, представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС LM358 (максимальная рабочая температура +70 °С) выходным транзистором (максимально допустимая температура +150 °С). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro’sKit набором инструментов. Как видите все нужно решать в комплексе – смотреть не только на схемотехнику, но и внимательно относится к конструкции регулятора в целом.
| |||||
| Рисунок 6. | Пример схем регуляторов с ШИМ и изменением опорной частоты. | ||||
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [5] (Одна из них приведена на Рисунке 6а). Есть схемы и на базе популярного таймера серии 555 [6] (Рисунок 6б). Эти дешевые решения не должны вводить вас в заблуждение своей кажущейся простотой. Вспомним А.С. Пушкина: «Не гонялся бы ты, поп, за дешевизной». Или французов: «За каждое удовольствие нужно платить». Обе эти схемы формируют суррогатный сигнал ШИМ с изменением опорной частоты. Так схемы на ОУ из [5] меняют частоту управления во время регулирования от 170 Гц до 500 Гц, а схема на таймере – от 150 Гц до 1000 Гц, и ее диапазон регулировки (верхний диапазон) ограничен скважностью 9.5. Для некоторых применений это может быть недопустимо, так как на больших частотах двигатель может и не заработать, или не дать нужный момент вращения. Это происходит из-за того, что ток в обмотке двигателя, которая представляет собой индуктивность, устанавливается не мгновенно, а нарастает и спадает по экспоненте. Более корректные схемы на базе таймера и одиночного ОУ приведены на Рисунке 7.
| |||||
| Рисунок 7. | Схемы регуляторов с ШИМ без изменения опорной частоты. | ||||
Аналогичные по структуре регуляторы можно построить и на цифровых логических элементах, но они имеют малую нагрузочную способность и требуют отдельного источника питания, поэтому в данной статье не рассматриваются. Применение же таймера 555 интересно тем, что частота генератора, выполненного на его базе, практически не зависит от напряжения питания. Кроме того, большинство ныне выпускаемых зарубежных аналогов, выполненных по биполярной технологии, допускает выходной ток до 200 мА и более. То есть, они могут легко справиться и с емкостью затвора MOSFET и с мощными ключами на биполярных транзисторах. Близкий к таймеру 555 советско-российский аналог – это ИМС (КР)1006ВИ1. Максимальный выходной ток для КР1006ВИ1 и КМОП-версий таймера составляет 100 мА.
Источник



