
РЕГУЛЯТОР МОЩНОСТИ ДЛЯ 3 ФАЗНОГО МОТОРА
Цифровой регулятор мощности для 3 фазного мотора переменного тока выполнен с использованием специальной микросхемы MC3PHAC от фирмы NXP Semiconductor. Она генерирует 6 ШИМ-сигналов для 3 фазного двигателя переменного тока. Блок легко совмещается с мощным 3 фазным IGBT/MOSFET ключевым приводом. Плата обеспечивает 6 ШИМ сигналов для IPM или IGBT инвертора, а также сигнал торможения. Схема работает в автономном режиме и не требует программирования и кодирования.
Схема регулятора

Органы управления
- PR1: Потенциометр для установки ускорения
- PR2: Потенциометр для регулировки скорости
- SW1: Переключатель DIPX4 для установки частот 60Hz/50Hz и установки выхода активный низкий / активный высокий
- SW2: Переключатель сброса
- SW3: Старт / стоп мотор
- SW4: изменить направление двигателя

Основные параметры
- Питание драйвера 7-15 В постоянного тока
- Потенциометр для управления скоростью двигателя
- Частота ШИМ по умолчанию 10.582 кГц (5.291 кГц – 164 кГц)
М/с MC3PHAC — это монолитный интеллектуальный контроллер, разработанный специально для удовлетворения потребности в недорогих 3-фазных системах управления электродвигателем переменного тока с регулировкой скорости вращения. Устройство адаптируется и настраивается в зависимости от его параметров. Оно содержит все активные функции, необходимые для реализации части управления с открытым контуром. Всё это делает MC3PHAC идеально подходящей для устройств, требующих поддержки управления двигателем переменного тока.

В состав MC3PHAC входят защитные функции, состоящие из контроля напряжения шины постоянного тока и входа неисправности системы, которые немедленно отключат модуль ШИМ при обнаружении неисправности системы.
Все выходные сигналы TTL уровня. Вход для блока питания 5-15 В постоянного тока, постоянное напряжение на шине должно быть в пределах 1.75 — 4,75 вольта, DIP-переключатель предусмотрен на плате для установки под двигатели с частотой 60 или 50 Гц, перемычки помогают установить полярность выходного ШИМ-сигнала, то есть активный низкий или активный высокий уровень, что позволяет использовать эту плату в любом модуле, так как выход можно установить активный низкий или высокий. Потенциометр PR2 помогает регулировать скорость двигателя. Для изменения базовой частоты, времени отключения ШИМ, других возможных параметров — изучайте даташит. Файлы платы — в архиве

Управление скоростью. Синхронная частота электродвигателя может быть задана в режиме реального времени для любого значения от 1 Гц до 128 Гц регулировкой потенциометра PR2. Коэффициент масштабирования составляет 25,6 Гц на вольт. Обработка 24-битным цифровым фильтром для того чтобы увеличить стабильность скорости.
Управление ускорением. Ускорение двигателя может быть задано в режиме реального времени в диапазоне от 0,5 Гц/сек до 128 Гц/сек, путем регулировки потенциометра PR1. Коэффициент масштабирования составляет 25,6 Гц/секунду на вольт.
Защита. При возникновении неисправности MC3PHAC немедленно отключает ШИМ и ожидает, пока условие неисправности не будет устранено перед запуском таймера для повторного включения. В автономном режиме этот интервал времени ожидания задается на этапе инициализации путем подачи напряжения на вывод MUX_IN, в то время как вывод RETRY_TxD управляется на низком уровне. Таким образом, время повтора может быть указано от 1 до 60 секунд с коэффициентом масштабирования 12 секунд на вольт.
Контроль внешних неисправностей. Вывод FAULTIN принимает цифровой сигнал, указывающий на неисправность, обнаруженную с помощью внешних цепей мониторинга. Высокий уровень на этом входе приводит к немедленному отключению ШИМ. Как только этот вход возвращается к низкому уровню логики, таймер повтора сбоя начинает работать, и ШИМ повторно включается после достижения запрограммированного значения тайм-аута. Входной контакт 9 разъема CN3 FLTIN должен быть с высоким потенциалом.
Мониторинг целостности напряжения (входной сигнал pin 10 в cn3) в DC_BUS отслеживается на частоте 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц). В автономном режиме пороги фиксируются на 4.47 вольт (128% от номинальной), и 1,75 вольт (50% от номинальной), где номинальное значение определяется в 3,5 вольт. Как только уровень сигнала DC_BUS возвращается к значению в пределах допустимого — таймер повтора сбоя начинает работать, и ШИМ снова включается после достижения запрограммированного значения тайм-аута.
Регенерация. Процесс экономии, с помощью которого сохраненная механическая энергия в двигателе и нагрузке переносятся обратно в привод электроники, происходит это как правило, в результате принудительного замедления. В особых случаях, когда этот процесс происходит часто (например, системы управления двигателями лифтов), он включает специальные функции, чтобы позволить этой энергии перейти обратно в сеть переменного тока. Однако для большинства недорогих приводов переменного тока эта энергия сохраняется в конденсаторе шины постоянного тока за счет увеличения ее напряжения. Если этот процесс не установлен, напряжение шины постоянного тока может подниматься до опасного уровня, что может привести к порче конденсатора шины или транзисторов в инверторе питания. MC3PHAC позволяет автоматизировать и стабилизировать этот процесс.
Резистивное торможение. DC_BUS пин-код отслеживается на 5.3 кГц (4.0 кГц, если частота ШИМ имеет значение до 15,9 кГц), и когда напряжение достигает определенного порога, RBRAKE контакт примет высокий потенциал. Этот сигнал может использоваться для управления резистивным тормозом, размещенным через конденсатор шины постоянного тока, таким образом, механическая энергия от двигателя будет рассеиваться в виде тепла в резисторе. В автономном режиме порог DC_BUS, необходимый для подтверждения сигнала RBRAKE, зафиксирован на уровне 3,85 вольта (110 % номинала), где номинал определяется как 3,5 вольта.

Выбор частоты ШИМ. У MC3PHAC имеется четырех дискретных частоты ШИМ, которые могут быть динамически изменены во время вращения электродвигателя. Этот резистор может быть потенциометром или фиксированным резистором в диапазоне, показанном в таблице. Частота ШИМ определяется подачей напряжения на контакт MUX_IN в то время как контакт ШИМ FREQ_RxD управляется низким потенциалом.
Источник
Частотный привод 5-200 Гц (10-400 Гц)
В данной статье речь пойдет о частотном преобразователе, в простонародье, частотнике. Данный частотник, а в дальнейшем частотный привод, способен управлять 3-х фазным асинхронным двигателем. В данном частотном приводе (ЧП) я использую интеллектуальный силовой модуль компании International Rectifier, а конкретно IRAMS10UP60B (на AliExpress), единственное, что с ним сделал, это перегнул ножки, так что, по сути, модуль получился IRAMS10UP60B-2. Выбор на данный модуль пал преимущественно из-за встроенного драйвера. Главной особенностью встроенного драйвера является возможность использования 3 ШИМ вместо 6 ШИМ каналов. Кроме того цена на данный модуль на eBay около 270 рублей. В качестве управляющего контроллера использую ATmega48.
Разрабатывая данный привод я делал упор на эффективность конструкции, минимальную себестоимость, наличие необходимых защит, гибкость конструкции. В результате получился частотный привод со следующими характеристиками (функциями):
- Выходная частота 5-200 Гц
- Скорость набора частоты 5-50 Гц в секунду
- Скорость снижения частоты 5-50 Гц в секунду
- 4-х фиксированная скорость (каждая из которых от 5-200 Гц)
- Вольт добавка 0-20%
- Две «заводских» настройки, которые всегда можно активировать
- Функция намагничивания двигателя
- Функция полной остановки двигателя
- Вход для реверса (как без него)
- Возможность менять характеристику U/F
- Возможность задания частоты с помощью переменного резистора
- Контроль температуры IGBT модуля (сигнализация в случае перегрева и остановки привода)
- Контроль напряжения DC звена (повышенное-пониженное напряжение DC звена, сигнализация и остановка привода)
- Пред заряд DC звена
- Максимальная мощность с данным модулем 750 вт, но крутит и 1.1 кв на моем ЧПУ
- Все это на одной плате размером 8 х 13 см .
На данный момент защита от сверх тока или кз не реализованы (считаю нет смысла, хотя, свободную ногу в МК с прерыванием по изменению оставил)
Собственно, схема данного девайса :
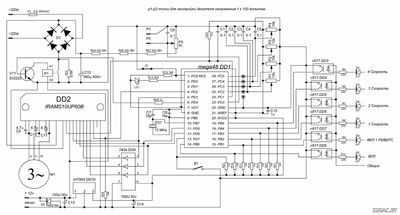
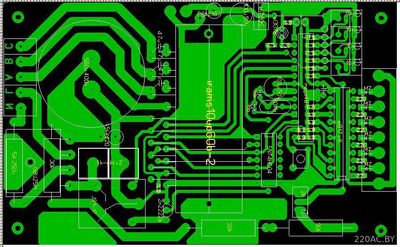
Проект в layout
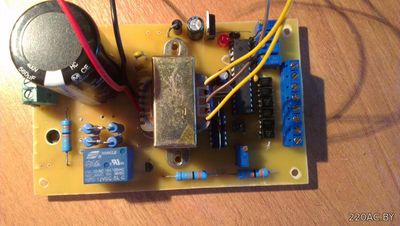
Ниже фото того, что у меня получилось
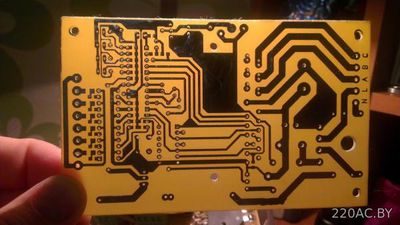
Печатная плата данного девайса (доступна в lay под утюг)

На данном фото полностью рабочий экземпляр, проверенный и обкатанный (не имеет панельки расположен слева). Второй для теста atmega 48 перед отправкой (расположен справа).
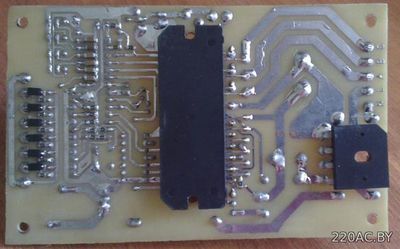
На данном фото тот самый irams (делал с запасом, должен поместится iramx16up60b )
Алгоритм работы устройства
Изначально МК (микроконтроллер) является настроенным на работу с электродвигателем номинальным напряжением 220 В при частоте вращающего поля 50Гц (т.е. обычный асинхронник, на котором написано 220 в 50 Гц). Скорость набора частоты установлена на уровне 15 Гц/сек.(т.е. разгон до 50 гц займет чуть более 3 сек., до 150 Гц-10 сек ). Вольт добавка установлена на уровне 10 %, длительность намагничивания 1 сек. (постоянная величина неизменна ), длительность торможения постоянным током 1 сек. (постоянная величина неизменна). Следует отметить ,что напряжение при намагничивании, как и при торможении, является напряжением вольт добавки и меняется одновременно. К слову, преобразователь частоты является скалярным, т.е. с ростом выходной частоты увеличивается выходное напряжение.
После подачи питания происходит заряд емкости dc звена. Как только напряжение достигает 220В (постоянное ) с определенной задержкой включается реле предзаряда и загорается единственный у меня светодиод L1. С этого момента привод готов к запуску. Для управления частотником имеется 6 входов:
- Вкл (если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц)
- Вкл+реверс(если подать лишь этот вход, ЧП будет вращать двигатель с частотой 5 Гц, но в другую сторону)
- 1 фиксированная частота (задается R1)
- 2 фиксированная частота (задается R2)
- 3 фиксированная частота (задается R3)
- 4 фиксированная частота (задается R4)
В этом управлении есть одно Но. Если в процессе вращения двигателя менять задание на резисторе, то оно изменится лишь после повторной подачи команды (вкл.) или (вкл+реверс.). Иначе говоря, данные с резисторов читаются пока отсутствуют эти два сигнала. Если планируется регулировать скорость с помощью резистора в процессе работы, то необходимо установить джампер J1.В этом режиме активен лишь первый резистор, причем резистор R4 ограничивает максимальную частоту, то есть если его выставить на 50% (2.5 вольта 4 «штырь». на фото ниже 5 земля), то частота R1 будет регулироваться резистором от 5 до 100 Гц.
Для задании частоты вращение нужно учитывать, что 5v на входе в МК соответствует 200 Гц., 1v-40 Гц, 1.25v-50 Гц и т.д. Для измерения напряжение предусмотрены контакты 1-5, где 1-4 соответствуют номерам резисторов, 5- общий минус(на фото ниже). Резистор R5 служит для подстройки масштабирования напряжения DC звена 1 в -100 в (на схеме R30).

Внимание! Плата находится под напряжением опасным для жизни. Входа управления развязаны оптопарами.
Особенности настройки
Настройка привода перед первым включением сводится к проверке монтажа электронных компонентов и настройки делителя напряжения для DC звена (R2).
100 Вольтам DC звена должно соответствовать 1 вольт на 23 (ножке МК)- это ВАЖНО. На этом настройка завершена.
Перед подачей сетевого напряжения необходимо промыть плату (удалить остатки канифоли) со стороны пайки растворителем или спиртом, желательно покрыть лаком.
Привод имеет «заводские » настройки, которые подходят как для двигателя с напряжением 220 В и частотой 50 Гц), так и для двигателя с напряжением 380 в и частотой 50 гц. Данные настройки всегда можно установить если вы не решаетесь сами настраивать привод. Для того чтобы установить «заводские » настройки для двигателя (220 в 50 Гц) :
- Включить привод
- Дождаться готовности (если подано питание только на МК , просто подождать 2-3 секунды)
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод L1 не начнет мигать, отпустить кнопку В1
- Подать команду выбора 1 скорости. Как только светодиод перестанет мигать, убрать команду
- Привод настроен . В зависимости от того . светодиод горел (если не горел, то привод ожидает напряжения на DC звене).
При такой настройке автоматически в записываются следующие параметры:
- Номинальная частота двигателя при 220 В — 50 Гц
- Вольт добавка (напряжение намагничивания, торможения ) — 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Если подать сигнал выбора второй скорости, то в EEPROM запишутся следующие параметры (разница лишь в частоте):
- Номинальная частота двигателя при 220 В- 30 Гц
- Вольт добавка (Напряжение намагничивания, торможения ) 10%
- Интенсивность разгона 15 Гц./сек
- Интенсивность торможения 15 Гц./сек
Наконец, третий вариант Настройки:
- Нажать на кнопку В1 и держать
- Дождаться, когда светодиод начнет мигать
- Отпустить кнопку В1
- Не подавать напряжение на входа выбора 1-ой или 2-ой скорости
- Задать параметры подстроечными резисторами
- Нажать и удерживать кнопку В1 до тех пор, пока светодиод не начнет моргать
Таким образом, до тех пор, пока светодиод мигает, привод находится в режиме настройки. В этом режиме при подаче входа 1-ой или 2-ой скорости в EEPROM записываются параметры. Если не подавать напряжение на входа выбора 1-ой или 2-ой скорости, то фиксированные параметры в EEPROM не запишутся, а будут задаваться подстроечными резисторами.
- Резистор задает номинальную частоту двигателя при 220 В ( Так, например, если на двигателе написано 200 Гц /220 то резистор нужно выкрутить на максимум; если написано 100 Гц/ 220 в нужно добиться 2.5 Вольта на 1-ом контакте. (1 Вольт на первом контакте соответствует 40 Гц); если на двигателе написано 50 Гц/400 В то нужно выставить 27 Гц/0,68 В (например:(50/400)*220=27 Гц )так, как нам необходимо знать частоту двигателя при 220В питания двигателя. Диапазон изменения параметра 25 Гц — 200 Гц.(1 Вольту на контакте 1-ом соответствует 40 Гц)
- Резистор отвечает за вольт добавку. 1 Вольт на 2-ом контакте соответствует 4% напряжения вольт добавки (мое мнение выбрать на уровне 10% то есть 2.5 вольта повышать с осторожностью) Диапазон настройки 0-20% от напряжения сети (1 Вольту на контакте 2-ом соответствует 4%)
- Интенсивность разгона 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 15 -25 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 3-ом соответствует 10 Гц/сек)
- Интенсивность торможения 1 В соответствует 10 Гц/сек (на мой взгляд оптимально 10 -15 Гц/сек) Диапазон настройки 5 Гц/сек — 50 Гц/сек. (1 вольту на контакте 4-ом соответствует 10 Гц/сек)
После того, как все резисторы выставлены нажимаем и держим кнопку В1 до тех пор пока светодиод не перестанет мигать. Если светодиод моргал и загорелся, то привод готов к запуску.Если светодиод моргал и НЕ загорелся, то ждем 5 секунд, и только потом отключаем питание от контроллера.
Ниже представлена вольт-частотная характеристика устройства для двигателя 220 в 50 Гц с вольт добавкой в 10 % .
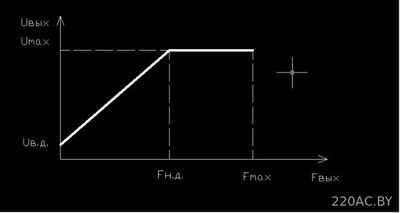
- Uмах- максимальное напряжение, которое способен выдать преобразователь
- Uв.д.- напряжение вольт добавки в процентах от напряжении сети
- Fн.д.- номинальная частота вращения двигателя при 220 В . ВАЖНО
- Fmax- максимальная выходная частота преобразователя.
Еще один пример настройки
Предположим, у вас имеется двигатель, на котором указана номинальная частота 50 Гц , номинальное напряжение 80 В, Чтобы узнать какая будет номинальная частота при 220 В необходимо: 220 В разделить на номинальное напряжение и умножить на номинальную частоту (220/80*50=137 Гц). Таким образом, мы получим,что напряжение на 1 контакте (резисторе) нужно выставить 137/40=3,45 В.
Симуляция в протеусе разгон 0-50 Гц одной фазы (на 3-х фазах зависает комп )
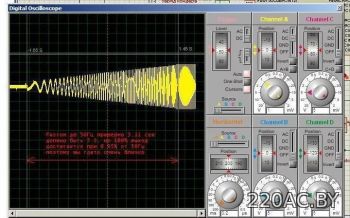
Как видно из скриншота с ростом частоты увеличивается амплитуда синуса. Разгон занимает примерно 3.1 сек.
По поводу питания
Рекомендую использовать трансформатор, так как это самый надежный вариант. На моих тестовых платах нет диодных мостов и стабилизатора для igbt модуля 7812. Для скачивания доступны две печатные платы. Первая та которая представлена в обзоре. Вторая имеет незначительные изменения, добавлен диодный мостик и стабилизатор. Защитный диод ставить обязательно P6KE18A или 1.5KE18A ставить обязательно.
Пример размещения трансформатора, как оказалось найти совсем нетрудно.
Какой двигатель можно подключить к данному преобразователю частоты?
Все зависит от модуля. В принципе можно подключить любой, главное, чтобы его сопротивление для модуля irams10up60 было более 9 Ом. Нужно учесть, что модуль irams10up60 рассчитан на маленький импульсный ток и имеет встроенную защиту на уровне 15 А Этого очень мало. Но для двигателей 50 Гц 220 В 750 Вт, этого за глаза. Если у вас высокооборотистый шпиндель, то скорее всего он имеет маленькое сопротивление обмоток. Данный модуль может пробьет импульсным током. При использовании модуля IRAMX16UP60B (ножки придется загнуть самостоятельно) мощность двигателя по даташиту возрастает с 0.75 до 2.2 кВт.
Главное у данного модуля: ток короткого замыкания 140 А против 47 А, защита настроена на уровне 25 А. Какой модуль использовать решать вам. Нужно помнить что на 1 кВт необходимо 1000 мкФ емкости dc звена.
По поводу защиты от КЗ. Если у привода сразу после выхода не ставить сглаживающий дроссель (ограничивает скорость нарастания тока) и коротнуть выход модуля, то модулю придет «хана». Если у вас модуль iramX, шансы есть. А вот с IRAMS шансов ноль, проверено.
Программа занимает 4096 кБ памяти из 4098. Все сжато и оптимизировано под размер программы по максимум. Время цикла есть фиксированная величина равная 10 мс.
На данный момент всё вышеописанное работает и испытано.
Если использовать кварц на 20 МГц, то привод получится 10-400 Гц; темп разгона 10-100 Гц/сек; частота ШИМа возрастет до 10кГц; время цикла упадет до 5мс.
Забегая вперед следующий частотный преобразователь будет реализован на ATmegа64, иметь разрядность ШИМ не 8, а 10 Бит, иметь дисплей и множество параметров.
Ниже смотрите видео настройки привода, проверки защиты перегрева, демонстрации работы (использую двигатель 380 В 50 Гц, а настройки для 220 В 50 Гц). Так сделал специально, чтобы проверить как работает ШИМ с минимальным заданием.)
Источник



