
- Как сделать своими руками простые радиоуправляемые катера с фото, видео и пошаговой инструкцией
- Теория
- Изготовление радиоуправляемого катера для прикормки рыбы
- Балластная цистерна
- Аккумулятор и зарядное устройство
- Компоновка
- Сколько стоит построить катер для завоза прикормки
- Балансировка
- Простые радиоуправляемые катера
- Как сделать радиоуправляемый катер своими руками
- Строительство рулевой машинки
- RC лодка на Arduino из палок и .
- Найдены возможные дубликаты
- Продолжение про самолет из потолочной плитки
Как сделать своими руками простые радиоуправляемые катера с фото, видео и пошаговой инструкцией
Теория
Модель подводной лодки строится по тем же принципам, что и настоящая. В центре находится «прочный» водоНЕпроницаемый корпус, внутри которого скрыты все органы управления и электроника. Снаружу он окружен «легким» проницаемым корпусом, служащим для обтекания и красивого внешнего вида. Наша модель будет состоять только из прочного корпуса.
На скорости подводная лодка может погружаться за счет рулей глубины, а в статическом положении только с помощью балластной цистерны. Как это работает? При плавании на поверхности масса лодки чуть меньше массы объема вытесненной воды (закон Архимеда). Т.е. если лодка имеет объем 3л, то ее масса должна быть чуть меньше 3кг.
Теоретические расчеты погружения модели подводной лодки.
При строительстве есть 3 основные проблемы. Они вполне независимы и могут решаться отдельно.
- радио-аппаратура (2.4 ГГц не работают под водой)
- герметизация — корпус, вал двигателя и тяги рулей
- балластная цистерна
Изготовление радиоуправляемого катера для прикормки рыбы
Такому радиоуправляемому грузовому кораблю скорость не нужна, поэтому об обводах можно и не задумываться. Главное – вместительность, грузоподъемность и устойчивость.
Вышеперечисленным требованиям хорошо подходит такой тип судна, как катамаран. От этого и будем отталкиваться.
Посмотрите наброски корпуса в 3-х мерном редакторе. Именно так выглядит неприхотливый катер для завоза прикормки. Этот катер будет иметь 2 мотора крутящие водометные движетели, разворот осуществляется за счет реверса тяги двигателей. Это позволяет рыбацкому радиоуправляемому кораблю разворачиваться практически на месте.
Корпус корабля изготавливается из чего угодно. Можно использовать фанеру и затем оклеить ее стеклотканью на эпоксидной смоле, но лучше использовать ПХВ или пластик для изготовления рекламных стендов. Хорошо подходит и коропласт.
Пластики не гниют, не требуют пропитки и полной оклейки корпуса стеклотканью.
Клеится корпус встык, а места соединения проклеиваются снаружи полоской ткани, это можно сделать в последний момент перед покраской.
По верху катера делается мощный силовой каркас из алюминиевого профиля. Это позволяет распределить нагрузку на весь корпус и приделать удобную ручку для переноски.
Носовые отсеки заливаются монтажной пеной, то же можно сделать с кормовыми отсеками после установки дейвудной трубки. Это приидаст кораблю непотопляемость, так как пена гораздо легче воды.
Водометный движетель весьма прост в изготовлении – это водный винт находящийся в кольцевой трубке и канал подачи воды закрытый решеткой. Такое решение позволяет уберечь винт от наматывания водорослей или снастей.
Для того, что бы вода не поступала внутрь судна необходимо установить и .

Стоимость дейвудной трубы 200 руб, вала с винтом 160, мотор стоит 600 рублей. Итого 960 руб. Всего этого потребуется по 2 штуки.
Можно пойти другим путем и поставить . Стоимость одного такого двигателя в сборе 2700 рублей, но, зато в нем все уже установлено и даже сделан подвод воды на радиатор охлаждения двигателя. Впрочем, для тихоходного катера подвоза приманки это не является необходимостью.
Для моторов потребуются регуляторы, берем . Стоимость 490 рублей. Имеет радиатор водяного охлаждения, реверс хода (это необходимо для разворотов на водометных движетелях).
Регуляторов так же требуется 2 штуки, так что еще 900 рублей и получается 1860.
Для открывания коробок с приманками потребуется 1 или 2 сервомашинки. 2 – если делать независимое открытие каждого отсека. Да и установить по сервомашинке на отсек проще.
Сервы берем недорогие в пыле-влагозащищенном корпусе, прекрасно подойдут, усилие на валу у них 3.5 кг, стоимость 145 руб. Итого 2150.
Балластная цистерна
Обычно это самая сложная часть подводной лодки. Но мы сделаем ее просто — воспользуемся микронасосом. Точнее перистальтическим микронасосом — он сам держит давление и не требует дополнительных клапанов. Сам насос способен развивать давление в 1 атмосферу, это значит он сможет прокачать цистерну на глубине до 10 метров. Управляется насос так же как обычным электромотором — регулятор хода или серва с микро-переключателями.
Есть вариант наполнять резиновый шарик, но он может лопнуть. Воспользуемся шприцом на 150 мл, называется шприц-Жане. Насос сам двигает поршень. Позже можно повесить датчики и контролировать объем поступившей воды.
Оригинальная силиконовая трубка в насосе 2.54мм, поменял на 46мм. В итоге пропускная способность увеличилась в 1.5 раза. Мотор расчитан на 6 вольт, подаю 12. Мотор немного нагревается, но не критично. Итоговая скорость 100мл за 20 сек.
Аккумулятор и зарядное устройство
Не дорогой компьютеризированный зарядник позволяет заряжаться прямо от автомобильного аккумулятора. Стоит 680 рублей.
Аккумуляторы берем LiPo – это лучшее что можно найти на рынке модельных товаров.
Кладем в корзину 2 аккумулятора по 380 рублей, итого цена стала 5710.
Можно не скупиться и взять топовые, 2 штуки по 1150 рублей и общая цена будет 8150 рублей, но, так как рыбалка не каждый день, то дешевле раз в 3-4 года менять дешевые.
Для подсоединения аккумуляторов к регуляторам берем разъемы , это прибавит 160 рублей.
А вот видео как ходит самодельный катер для завоза приманки по озеру.

Про подключение всей электроники я расскажу в отдельной статье, а пока, давайте подобьем итоги.
Компоновка
Лодка имеет размеры 60см длина и 7,5см диаметр. Внутренний диаметр 71мм. Заглушки заходят на 2.5см каждая.
Внутри корпус поделен на «отсеки».
- 1 — аккумулятор и приемник
- 2 — цистерна
- 3 — насос
- 4 — сервы и регуляторы хода
- 5 — главный мотор
Цистерна должна находиться по середине, чтобы лодка погружалась горизонтально (не было дифферента).
Элеметны крепления изготовлены из листового пористого ПВХ толщиной 5мм. Затем они стягиваются на железных шпильках, расположенных вдоль корпуса. Заднюю заглушку тоже следует закрепить на шпильках, чтобы обеспечить жесткоть узла с мотором и тягами рулей.
Изначально для управления мотором и насосом использовались регуляторы хода. Но реверс у них на много медленнее прямого вращения, что не удобно для насоса.
Во время испытания я не ставил отдельную схему питания UBEC и использовал встроенный BEC на 1 ампер. Т.к. мне пришла бракованная серва, которая заклинивала, в этот момент ток подскакивал и палил весь регулятор.
Мотор 550-ой серии избыточен для модели такого размера, можно поставить меньше. Крепится он шурупами на специальный кронштеин к задней заглушке. Соединение с валом через латунную муфту.
Так же стоит поставить модули Fail-safe на каналы насоса и двигателя. Двигатель настраивается на выключение, а насос на продувку цистерны.

Все чертежи на отдельной странице.
Сколько стоит построить катер для завоза прикормки
Итак, окончательная цена оборудования составляет 5 870 рублей.
Много это или мало?
Продающиеся в магазинах катера для завоза приманки стоят около 30 000 рублей. При этом на них используются коллекторные двигатели (20-30 поездок по воде и надо менять щетки двигателей или заменять движки) и устаревшая аппаратура на FM диапазоне (подвержена помехам, вы можете потерять управление катером).
Обычно, через полгода использования покупного катера для завоза прикормки его начинают переделывать – менять двигатели на бесколлекторый вариант (цену смотрите выше в статье), вместе с двигателем и регуляторы придется поменять на бесколлекторный вариант.
Передатчик и приемник так же требуют замены – ставят Turnigy 9x, она работает в помехозащищеном диапазоне 2.4 гигагерца.
Свинцовый аккумулятор за зиму теряет свои характеристики, если конечно его не разряжать и заряжать пару раз в месяц – но кто это делает? Так что по совету бывалых аккумулятор меняют на LiPo, они не подвержены таким явлениям, и покупают к ним зарядное устройство.

Фактически, от купленного катера остается только корпус и пара сервомашинок для открытия люков с приманкой.
Вы готовы отдать 30 тысяч рублей за пару сервомашинок ценой менее 300 рублей и корпус который делается за пару выходных?
Вот и получается, что сделать катер для завоза приманки своими руками гораздо выгоднее!
В догонку — а можно купить дешевый катер-игрушку за 2-3 тр, добавить к нему попловки по бокам (сделать из пенопласта и обтянуть тюлью на аквалаке, стеклоканью на жпоксидке или покрасить автоэмалью) и завозить на нем. Открывать отсеки кормушек можно с помощью рывка прочной ники или лески с земли — это самый дешевый вариант! 🙂
— Делаем квадрокоптер из линеек.
— Изготовление катера для прикормки своими руками.
— Изготовление квадрокоптера из подручных материалов.
— Делаем модель радиоуправляемой яхты за один вечер.
— Как сделать простую радиоуправляемую модель самолета.
— В помощь рыбаку.
— из такого конструткора можно собирать самодельные радиоуправляемые модели автомобилей.
Все Сам и своими руками
Балансировка

Объем надводной части должен быть меньше объема цистерны
Он может быть любой массы, лишь бы общая оставалась 2.8 кг. Поэтому надводные элементы делают из меди или тонких пластиков.
Балансировка осуществлуяется в 2 положениях:
- Надводное — Двигая/добавляя грузы и приклеивая пенопласт в подводную часть, добиваемся нулевого дифферента. Важно на этом этапе крепить пенопласт только ниже ватерлинии.
Погруженное — добавляем пенопласт выше ватерлинии и добиваемся горизонта.
Источник
Простые радиоуправляемые катера
Мастер знакомит вас с серией самодельных игрушек и покажет как сделать самому своими руками интересные радиоуправляемые катера из доступных материалов и с минимальными затратами денег и времени.
Как сделать радиоуправляемый катер своими руками
Построив весной 2016 года для ребенка аэро катер из куска пенопласта и игрушесного вентилятора оказалось, что игрушка аэролодка обладает довольно неплохими мореходными свойствами. Подробности строительства аэро лодки можно уточнить перейдя по ссылке.
Сразу возникло желание сделать игрушку радиоуправляемой. Зная интерес детей к таким игрушкам и время их активной жизни, при установке системы радиоуправления были соблюдены некоторые условия:
1. Доступность батарей питания для модели и передатчика управления.
2. Экономичность работы, комплекта батарей должно хватать на несколько дней, а не на один заплыв.
3. Применение доступных деталей и максимальное сокращение затрат.
4. Универсальность конструкции с возможностью внесения изменений и усовершенствований.
5. Дальность действия системы радиоуправления не ниже 25-30 метров.
 Airboat
Airboat  Радиоуправляемая аэро лодка
Радиоуправляемая аэро лодка  Радиоуправляемая аэро лодка
Радиоуправляемая аэро лодка  Катер пароход
Катер пароход  Катер Рыба
Катер Рыба  Рулевая машинка
Рулевая машинка
Строительство рулевой машинки
Модернизация игрушки аэролодки началась со строительства рулевой машинки. Решение о использовании старого HDD в качестве рулевой машинки возникло еще при изобретении экспериментального динамика . Основой рулевой машинки будет линейный двигатель HDD — это мощный и довольно экономичный серво мотор с током потребления от 50 до 200 mA в зависимости от типа HDD. Серводвигатель может управлять аэро рулем, погружным рулем, поворачивать силовую установку и даже быть движителем! Подробности строительства рулевой машинки приведены здесь и показаны на видео.
Источник
RC лодка на Arduino из палок и .
Насмотревшись видосов про лихое радиоуправляемое моделестроение (сам в прошлом авиамоделист) на базе Arduino и радио модуля NRF24, решил сам запилить сие чудо по традиции из палок и навоза.
Для начала была заказана на всем известном китайском сайте вся модульная часть про запас. Все модули брал в одном магазине чтобы пришли одной посылкой.

Коротко о заказе:
1. Радиомодуль nRF24L01
2. Адаптеры питания для радио модулей, так как питается это чудо от 3,3В, и питания с arduino ему не хватает для передачи дальше чем на несколько метров
3. Джойстики с триггерами.
4. Клоны arduino на Atmega 328p.
5. Серво приводы SG90.
6. Повышающие преобразователи 2х типов, на всякий.
Итого вся посылка вышла примерно на 2,5к деревянных
Тут на 2 полноценных комплекта аппаратуры передатчик-приемник с дальностью 1км.
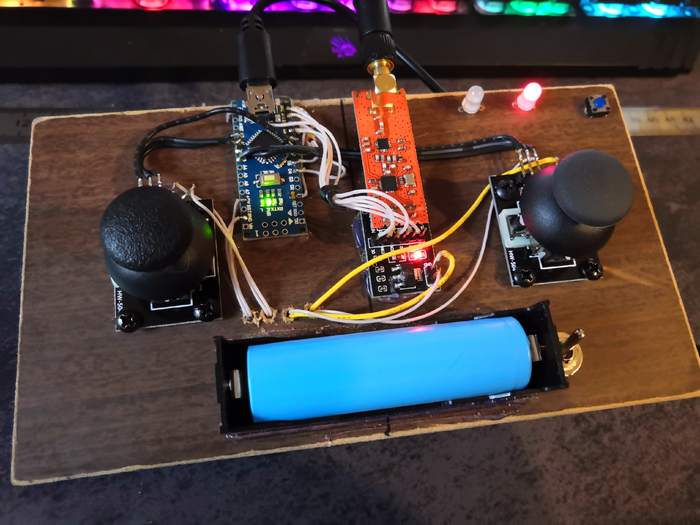
Не долго думая прикинул как может выглядеть пульт, и вот как то так..
От потенциометра потом отказался, не нужен пока и можно в любое время поставить.

Особенность реализации RC узла на Arduino с радио модулем в том, что эта скромная железка способна передавать 32 канала Кааарл! Конечно типа byte, но всё же, а зачем в RC что то больше чем байт?
В качестве площадки под джойстик взял уже засветившуюся в предыдущих постах ДВП из бабушкиного чулана =)
Питание Li-ion 3.7V с повышающим преобразователем до 5В. Схемы распайки джойстиков и NRF24 в интернете просто валом, по этому чтобы не захламлять пост их не прикладываю.
Важный нюанс коммутации радио модуля адаптера питания и ардуино — ВСЁ ПАЯТЬ! никаких разъемов, иначе это всё очень нестабильно себя ведет да и китайцы иногда не пропаивают контакты чем мне просто взорвали пукан когда я пытался найти причину почему у меня 70% потерь в радио канале.
Долго думал из чего лепить корпус лодки. И решил заказать детские игрушки)) 2 лодочки с разными моторами. На одной мотор как торпеда прикручен снизу лодки и имеет обычный винт, у второй центробежный насос и очень стильный дизайн.
Но начал я с первой, так как предчувствовал многие часы экспериментов и жертв.
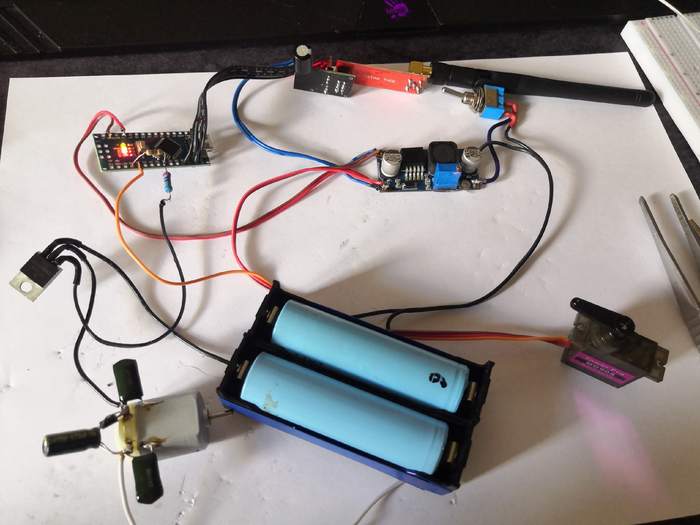
Был собран первый стенд для проверки кода и понимания тонкостей работы.
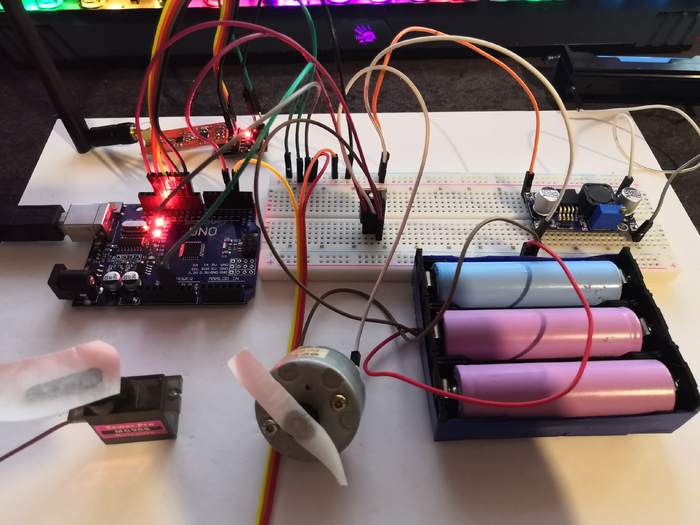
Работало как то не стабильно из-за наводок мотора. Но о них позже.
Собрал я всё в корпусе первой лодочки. Управление питанием мотора через ШИМ с 5 выхода ардуины через мосфет IRF44N, какие завалялись в закромах. Одна линия питания на всё(я никогда еще так не ошибался) ну и подсветка из 6 диодов для красоты, коммутируемая так же мосфетом.
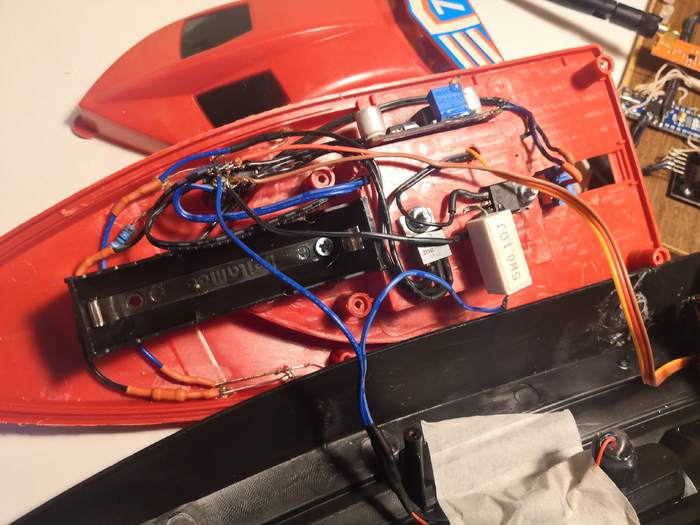
Испытания показали что всё это крайне не стабильно, двигатель у лодки на столько слабый и прожорливый до тока что она еле двигалась по воде )) но я извлек уроки.
И вот стенд номер два.
2 линии питания, решена проблема с наводками двигателя, которые сохранялись даже при раздельном питании логики и силовой, добавлением 2х конденсаторов по 0.1мкф между корпусом двигателя и контактами питания, так же воткнул диод обратно полярности подключения двигателя и конденсатор параллельно. Задний ход для лодки не предусмотрен, лень было заморачиваться с драйвером двигателя.
Монтаж в корпус заставил немного понервничать)) но я справился. Руль напрямую от сервопривода, никаких тяг и рычагов. В прошивке пульта ограничил угол поворота от 40 до 140 градусов и всё ок. Двигатель управляется ШИМ сигналом с 3 цифрового пина ардуинки. Подсветка реализована максимально просто — горит всегда но можно поморгать кнопочкой =)

Эта модель лодки оснащена центробежным насосом в качестве двигателя, это же почти реактивная тяга!

И очень не плохо показал себя на воде этот девайс. Достаточно уверенно плывет.
Вот лодка почти в сборе. местами коряво что то приклеил, для руля применил пластик от старой симки, в целом как то так.
С li-ion аккумуляторами лодка на воде держится по ватерлинии.. что не есть гуд, по этому приклеил 2 подушки из пенопласта для верности. (их оказалось маловато как показали испытания и чутка притопил нос..) По хорошему нужно использовать легкие Li-po акумы, но их не было под рукой.

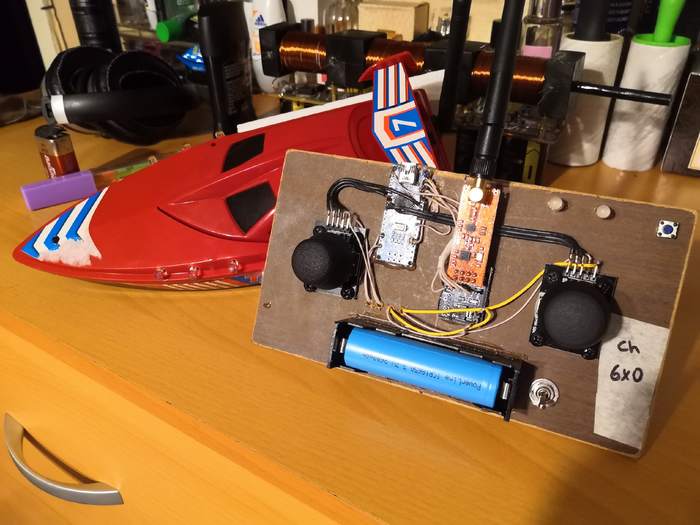
Лодка с пультом в сборе.

Пульт собирался универсальным, понятно что для лодки одного 2х осевого джойстика (2 канала) хватило бы.
Для веселых заплывов по городским озерам и лужам самое то =)
Проект делался для получения знаний и навыков в построении систем радио управления на базе платформы arduino. Применение этим знаниям можно найти в огромном количестве проектов, например сигнализация и охранные системы, системы контроля удаленных объектов, станции наблюдения за всем чем угодно, умный дом и т.д.
Спасибо за внимание!
Скетчи для arduino IDE по ссылке в архиве
Найдены возможные дубликаты
Пусть так, зато с душой!

Я б другой радиомодуль взял, что нибудь типа xl1276 на sx1278. Работает на 433 МГц, может работать как с fsk, так и lora. Lora вообще шикарна, получилось добиться дальности в 1 км без прямой видимости в городских условиях
$10 немного дороже чем $1, не находишь?
А почему не взять было бесколлекторный двигатель и ESC к нему? Сразу бы ушла проблема наводок, да и управление двигателем стало бы проще и удобнее.
Ну, это для вас Кэп и для тех, кто в курсе. А те, кто будут сами пытаться что-то делать, могут быть и не в курсе. 😉
Я для упрощения и уменьшения конструкции просто запитываю wifi через два диода от 5 Вольт остаётся 3.4
Недавно мудохался с esp-01 — модуль часто вис или перегружался, а иногда вис так, что ватчдог не срабатывал(или прогрузиться не могло?). В общем собирал фиговину для удаленного полива растений, пока я в отпуске на дачке.
Проблема была в том, что на беспаечной макетке всё это висло при подачи питания на насос. Ничего не помогало на 100% избавиться.
Решил подкинуть осциллограф на питание esp — подключаю, дёргаю — не виснет O_o, помех тоже нет. Сбросил общий провод от осциллографа — всё равно всё работает O_O. Полностью отрубаю осциллограф — начинает виснуть esp.
Подумал-подумал, да и запаял на макетке абсолютно такую же разводку что и на беспаечной — и оно стабильно работает.
В результате собрал две штуки по 3 насоса на одну esp, написал простенький софт для управления и теперь удаленно поливаю.



Отлично, вот только джойстики эти говно то еще )
Всё класс, но хотелось бы видео. У меня уже как 2 года эта идея витает в голове, никак руки не дойдут.
Радиомодуль nRF24L01 — можно подробнее про адаптеры? У меня реально они плохо ловят.


Продолжение про самолет из потолочной плитки

Схема подключения приемника:
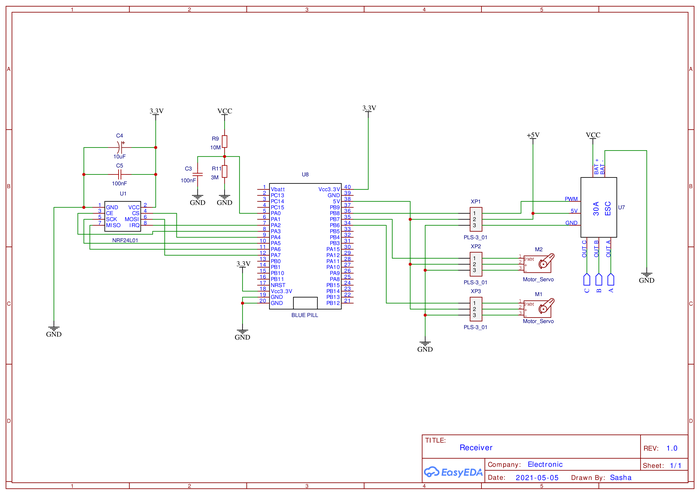
Здесь к blue pill подключается радиомодуль, контроллер двигателя и две сервомашинки. Аккумулятор подключается к контроллеру управления двигателя, на нем стоит стабилизатор на 5 вольт, с которого берется питание для управляющей электроники. Сервомашинки также запитываются с этих 5 вольт. Радиомодуль питается от +3,3 вольт со стабилизатора blue pill. Здесь имеется делитель напряжения, который подключен к аккумулятору, для контроля его напряжения. Информация шлется на пульт управления.
Программа для приемника: тут
Схема подключения пульта управления:
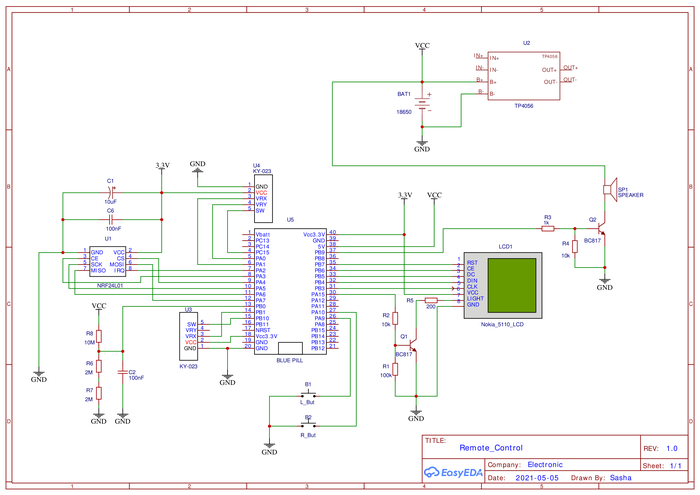
Здесь чуть побольше компонентов. Аккумулятор подключается на порт +5 вольт blue pill. Для зарядки аккумулятора к нему подключен модуль зарядки. С blue pill при помощи 3,3 вольт запитывется экран, радиомодуль, джойстики. Потенциометры джойстиков подключены к каналам АЦП blue pill, их тактовые кнопки и остальные две подключены на остальные порты в режиме вход.
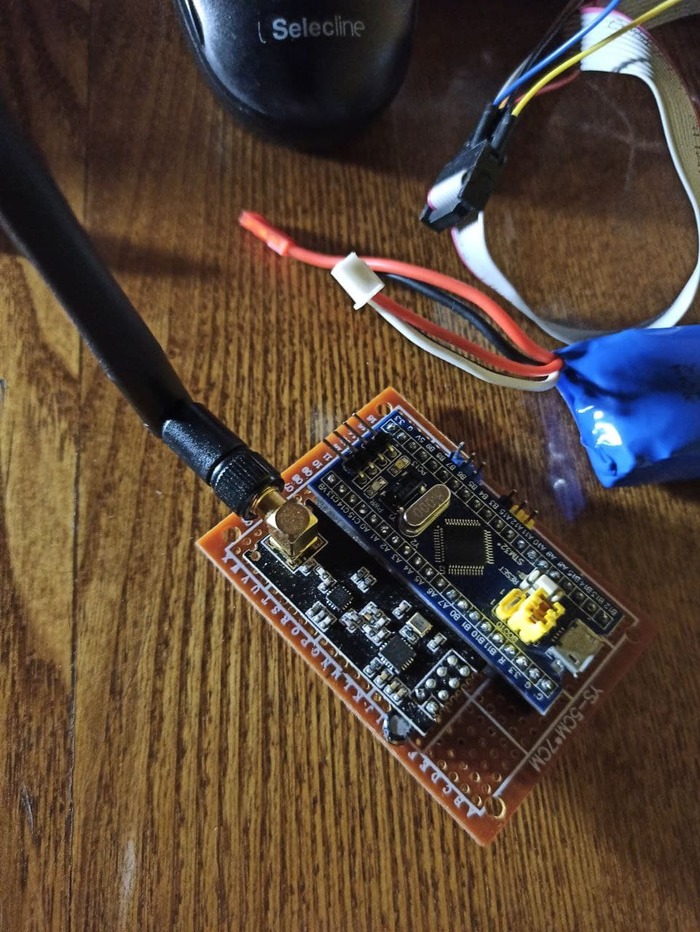
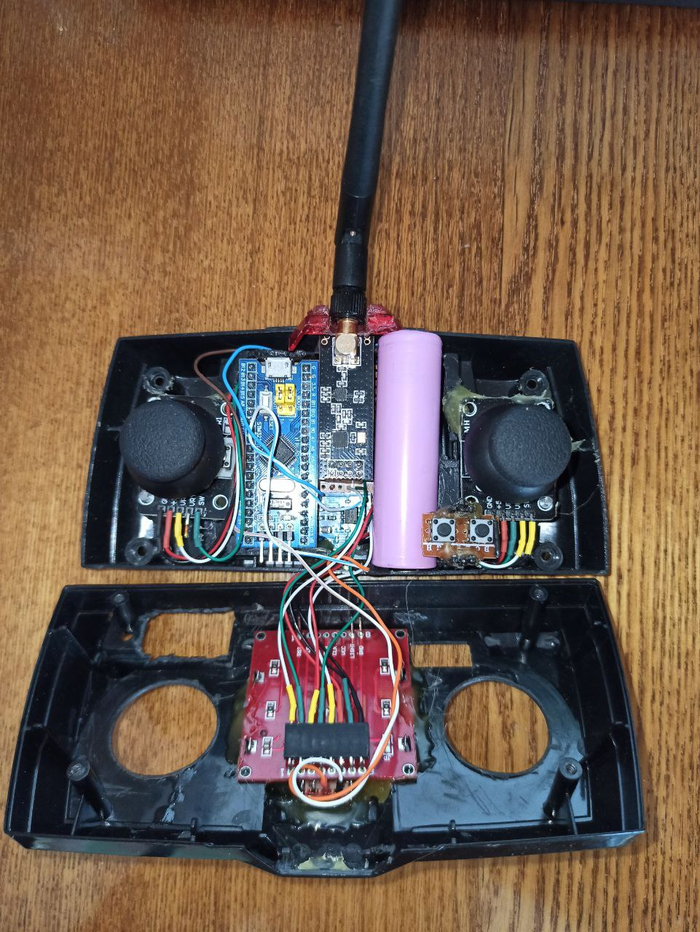
Пульт управления внутри:
Программа для пульта управления: тут
Пульт в собранном виде:

В меню пульта 4 строки: 1 строка — это режим полета, во 2 строке просто отображаются данные АЦП и т.д. в 3 строке настраиваются чувствительность рулей и субтример (начальное положение элевонов), в 4 строке ничего нет (можно добавить).
Нажатие правого джойстика — переход на одну строку вниз, левый — на одну строку вверх, нажатие одновременно двух джойстиков заходит в подменю выбранной строки, аналогично производится выход. Две другие кнопки используется для настройки чувствительности в меню строки Sensors, их одновременное длительное нажатие, в любом нахождении меню, включает подсветку. В режиме полета нажатие любого из джойстиков активирует работу двигателя или дективирует, чтобы при заходе в режим полета двигатель не работал сразу и случайно не отпилить себе пальцы винтом не поранил крутящим винтом.
При отключении пульта во время работы приемника, через 2 секунды отключается двигатель.
Расскомментировав эти строчки в main.c (до надпсиси END OF DEBUG_RC OUT):
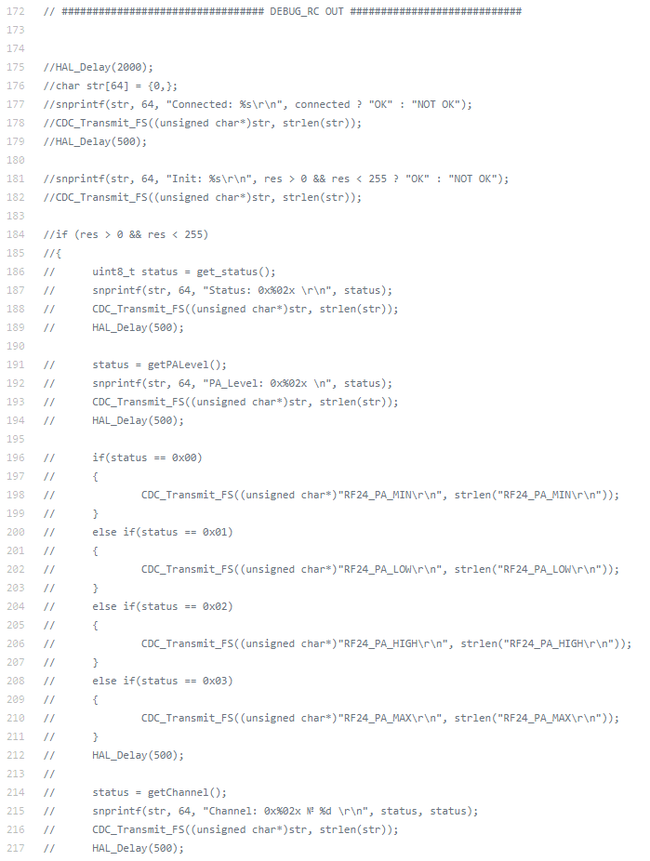
пульт можно подключить по USB к ПК при помощи любой Terminal программы (я пользовался CoolTerm), в которой нужно выбрать COM порт и присоединится к blue pill:
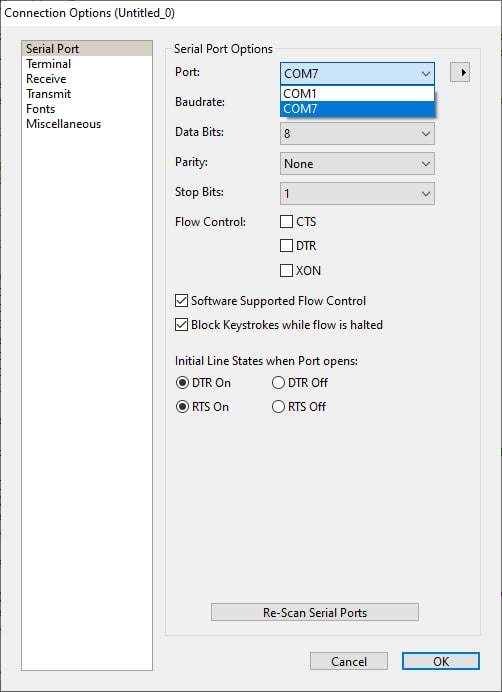
и в окне получить информацию о подключении радиомодуля:
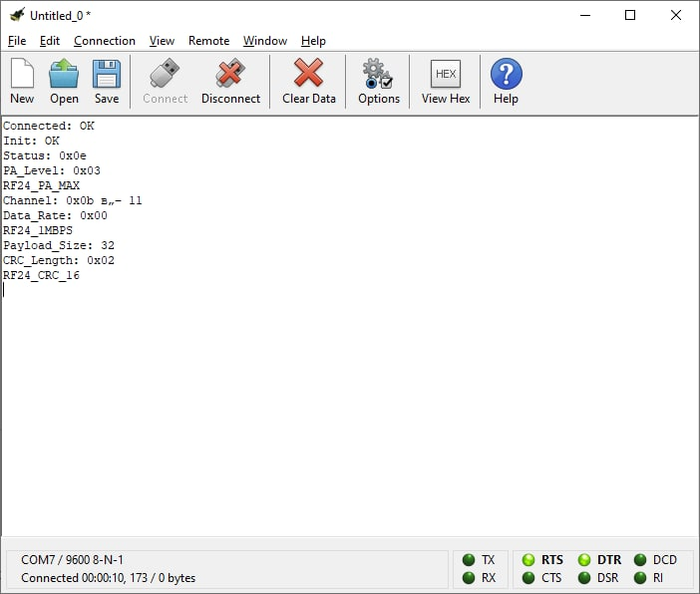
Считывая установочные данные, записанные в регистры радиомодуля, можно убедиться, что модуль работает и данные совпадают с установленными. В данном случае я получил статус работы радиомодуля, его мощность передачи (максимальная), номер канала (11), скорость передачи (1 Мбит в секунду), размер передаваемого пакета (32 байта — максимальный) и количество бит контрольной суммы (в моем случае 16 бит). Если модуль не подключен или неисправен в терминал выводит такое сообщение:

Зайдя сюда в подменю Settings:
в терминал посыпятся такие строчки:
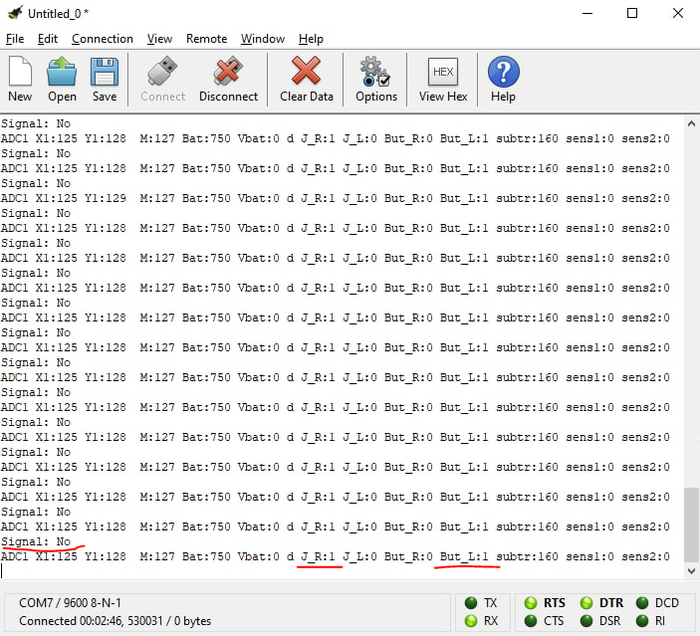
Здесь данные в таком порядке: X1: значение c АЦП правого джойстика по вертикали, Y1: значение c АЦП правого джойстика по горизонтали, значение с АЦП левого джойстика, которым управляется двигатель, значения только по вертикали, далее напряжения аккумулятора пульта, напряжения аккумулятора на приемнике, значение кнопки правого джойстика, значение кнопки левого джойстика, значения кнопок что находятся справа на пульте, субтример, чувствительность 1 и 2 (2 не используется), а также статус связи с приемником.
Как видно сигнала нет, так как примник был отключен. Также я зажал кнопку правого джойстика и просто левую кнопку, они выдают «1».
Включаю приемник и перевожу правый джойстик в правый верхний угол:
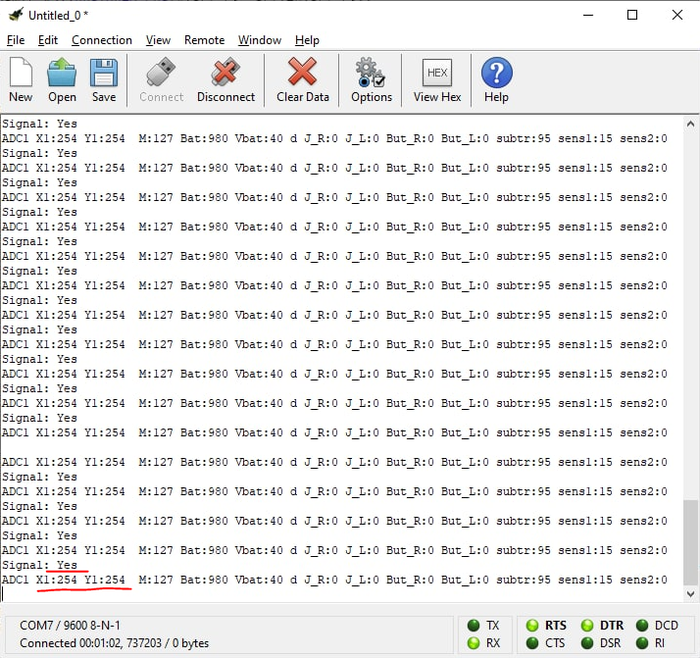
получаю сообщение что сигнал есть, а данные джойстика показывают максимальные значения.
АЦП на Blue Pill имеет разрешение 12 бит, максимальное значение котрого 4095, но в терминале видно, что оно 255, все потому что я 12 бит перевел в 8 бит (1 байт), так как один элемент массива передоваемого пакета равен 1 байту, чтобы одним байтом можно было слать значения одной из осей джойстика.
Аналогичным образом можно подключить приемник к ПК, узнать статус радиомодуля и получаемые данные с пульта, в main.c расскомментировав эти строчки:

Использовать джойстики для управления в таких проектах, вместо нормальных стиков не очень хорошо. Во-первых, для управления газа стик должен сохранять свое положение, а не быть подпружиненным и возвращаться на середину, убрать эту пружинку в джойстика очень проблемно, но я думаю можно. Во-вторых, это должны быть стики, так сказать длинные палочки, для более плавного и точного управления за счёт отдаления пальца от центра потенциометра или увеличения радиуса, это можно решить, наколхозив что-то длинное на джойстики. Специальные стики заточены именно под это, что нельзя сказать про джойстики, но на них цена уже совсем другая, например: стик FlySky.
Крыло сложно в управлении (по-моему мнению) по сравнению с моделями, имеющими хвост со стабилизатором и килем.
И наконец, то, чего мы так долго ждали. Видео полетов. К сожалению, видео очень короткое, так как полет был недолгий.
В ВИДЕО ПРИСУТСТВУЕТ ПАРУ ПЛОХИХ СЛОВ!
В заключении хочу написать, что это был мой первый опыт постройки подобной игрушки.
Самолёт полетел вполне уверенно, но что-то пошло не так, если честно, я не понял в чем причина, может это из-за джойстиков или все-таки конструкция крыла. Я думаю, что на этом я не остановлюсь и попробую как-нибудь еще, пересмотрев ошибки.
Ссылки на товары которые я использовал:
Отладочная плата Blue Pill
Набор из контроллера, двигателя винта и сервомашинок
Источник



