
- Сборка гироскутера своими руками в домашних условиях
- Как устроен гироскутер
- Основные детали конструкции гироцикла
- Схема управления гироборда
- Сборка самодельного гироборда
- Как сделать гироскутер своими руками в домашних условиях?
- Как сделать гироскутер
- Что такое гироскутер?
- Что же нам понадобится?
- Производство и процесс
- Основные характеристики проекта
- Конструкция каркаса
- Сбор механических деталей
- Электрическая схема
- Программное обеспечение
- Драйвер мотора
- Определение угла
- Пид контроллер
- Тестирование и настройка
- Порядок сборки сигвея
- Видео: как делают segway (гироскутер)
- Похожие изделия
Сборка гироскутера своими руками в домашних условиях
Появление средств передвижения на электротяге, снабженных электронным управлением, сразу же сделало их популярными. Сегвеи и гироскутеры выглядели настолько привлекательно, что сразу же появились желающие попробовать сделать гироскутер своими руками.
Понятно, что электротранспорт, изготовленный в домашних условиях, внешне отличается от заводских изделий, однако, при его создании используются технологии, практически идентичные тем, что применяются для изготовления гироциклов в массовом производстве.
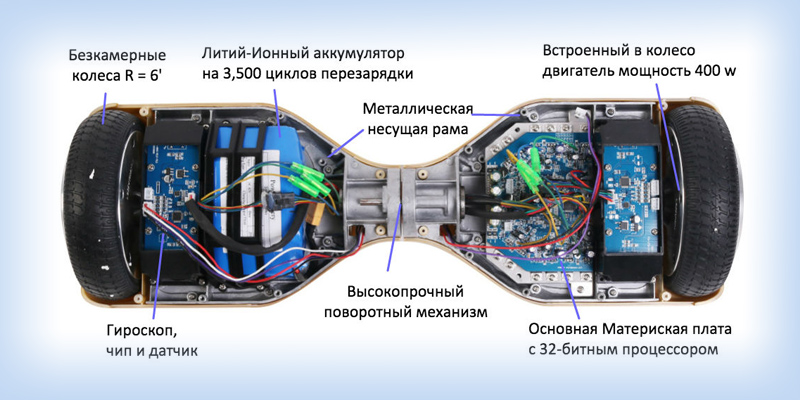
Как устроен гироскутер
Разобравшись в предназначении каждого из элементов комплекта оборудования, заключенного внутри корпуса, можно начинать работу над созданием гироскутера собственного производства. Любой из видов гиробордов является самобалансирующимся средством передвижения.
При его работе используется система гироскопических датчиков и технология, обеспечивающая баланс платформы. Одновременно с включением гироцикла приходит в действие система балансировки. В момент, когда водитель занимает свое место на платформе, она начинает менять положение, что считывается гироскопическими датчиками.
Полученная информация направляется на вспомогательные платы, размещенные по обе стороны платформы. Данные платы перерабатывают полученную информацию и отправляют ее в материнскую плату, где установлен микропроцессор. Материнская плата выполняет программу самобалансирования.
На практике происходят следующие действия:
- при наклоне платформы на несколько градусов вперед, двигатели получают сигнал на движение в обратном направлении до момента ее выравнивания. При наклоне в другую сторону запускается такой же процесс;
- на наклон платформы на больший градус, программа устройства отвечает командой электродвигателю на начало движения в направлении, обозначенном положением площадки;
- отключение двигателей и самого гироскутера происходит при отклонении платформы относительно горизонтали на угол более 45°.
Основные детали конструкции гироцикла
Перед тем, как сделать гироскутер в домашних условиях, потребуется подобрать комплект деталей, необходимых для сборки транспортного средства. Для этого потребуются:
- прочная основа, на которой будет закреплена электронная часть устройства;
- два электродвигателя, обладающие мощностью, достаточной для передвижения человека весом до 100 кг;
- материнская плата с процессором, дополненная двумя платами с гироскопическими датчиками;
- аккумуляторная батарея;
- два колеса одинакового диаметра.
Начнем с выбора электродвигателя. Он должен быть не менее 350 Вт, тогда суммарная мощность двух двигателей будет достаточной для перемещения веса взрослого человека. Для работы электродвигателей потребуется аккумулятор, способный без дополнительной зарядки обеспечивать подачу необходимой электроэнергии не менее часа. Поэтому его номинальная мощность выбирается не менее 4400 мА/ч.
К выбору колес следует подходить серьезно. У них должны быть прочные шины, а поскольку самодельный гироскутер будет иметь корпус больше и массивнее заводского, то необходимо обеспечить достаточное расстояние платформы от земли. Диаметр колеса должен быть не менее 10-12 дюймов.

Схема управления гироборда
Существует множество вариантов схем управления гироциклами, разработанных производителями устройств. Представлены и разработки любителей. Большинство «самоделкиных» для создания схемы управления транспортным средством используют микроконтроллеры Arduino, широко представленные на рынке.
Лучшим решением является UnoNano, а дополнительным чипом для обработки информации становится ATmega 328. Потребуется также два гироскопических датчика типа InvenSense MPU 6050. Их располагают на дополнительных платах, осуществляющих первичную обработку данных о положении платформы. В схему управления входят также датчики балансировки и датчики поворотов.
Сборка самодельного гироборда
Наиболее часто для изготовления корпуса создатели самодельного электротранспорта используют бруски и толстую фанеру. Основной причиной выбора деревянной конструкции корпуса становится его изоляционные свойства и легкость изготовления. Размеры корпуса выбираются таким образом, чтобы в нем удобно располагались все детали устройства.
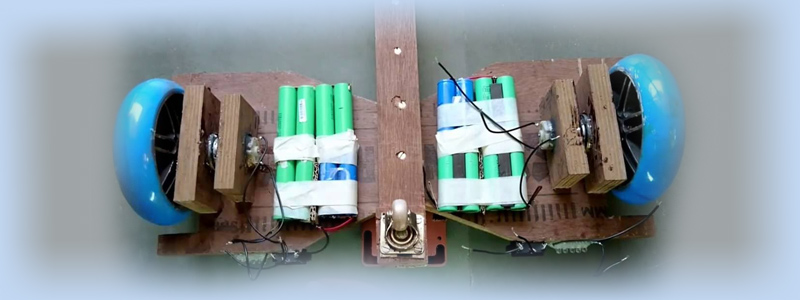
В первую очередь по бокам платформы монтируются двигатели, к которым зубчатой передачей присоединяются колеса. Для установки аккумулятора, заключенного в специальную коробку, выбирается место строго посередине коробки корпуса. Двигатели крепятся болтами, а для закрепления аккумуляторной коробки можно использовать саморезы.
В конструкцию самодельного устройства входит рулевой столб, на котором устанавливается кнопка готовности, нажатие которой будет служить командой поступления питания на двигатели. При её отжимании отключатся двигатели и сам гироскутер. С ее помощью будет обеспечена безопасность езды водителя.
При выполнении наладки микроконтроллера лучше воспользоваться услугами друзей, умеющих устанавливать программу Arduino Terminal и регулировать необходимые параметры.
Источник
Как сделать гироскутер своими руками в домашних условиях?


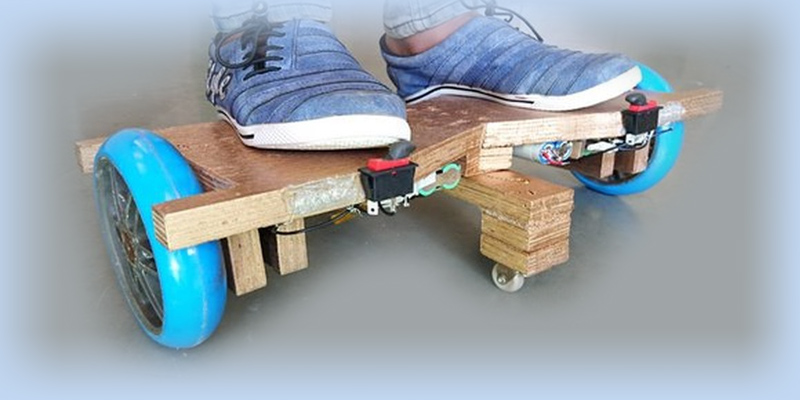
Этот самодельный гироскутер построен на базе рамы — шасси из рифленого алюминиевого листа размером 500 х 360 х 7 мм, на который устанавливаются двигатели.

Данный сигвей своими руками имеет два DC двигателя MY1020Z 500 Вт, 24 В, 12,6 Нм.
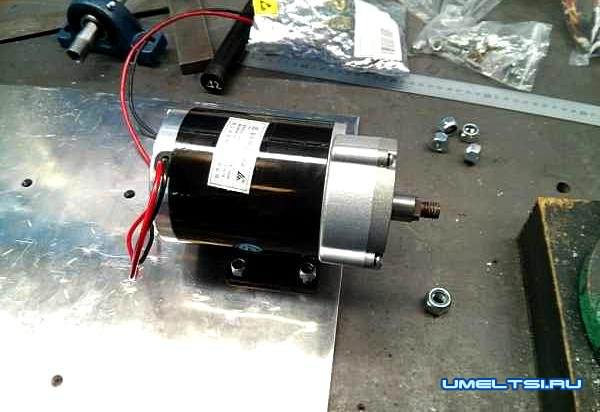
На нижнем изображении – лист алюминия, в котором уже готовы отверстия диаметром 8 мм для монтажа двигателей. Для крепления моторов используются потайные болты.

Следующий шаг заключается в закреплении в центральной части рамы конструкции, которая включает два корпусных узла и стальную водопроводную трубу диаметром 0,5 дюйма и длиной 300 мм.

На одной стороне трубы эпоксидным клеем фиксируется потенциометр 10 кОм, который будет определять, в каком положении находится рулевая тяга. На другой стороне потенциометр крепится алюминиевым кронштейном на основании.

С другой стороны, на трубу привариваем угловое соединение с углом 90 градусов.

На угловое соединение крепим Т-образную конструкцию, длина которой составляет 105 см. Она будет применяться в качестве руля.

Чтобы отцентрировать рулевой механизм, умелец взял пружины, стоявшие на старой стиральной машине. С одной стороны они прикреплены к основанию, с другой – к трубе хомутами.

Руль оснащен кнопкой безопасности – одна подключена к драйверам двигателей. При езде ее нужно все время удерживать нажатой.

Чтобы установить колеса, мастер изготовил специальную втулку колеса. Следует отметить, что втулка имеет выступающую часть, которая надевается на вал двигателя, что позволяет шестерням оставаться целыми и невредимыми.
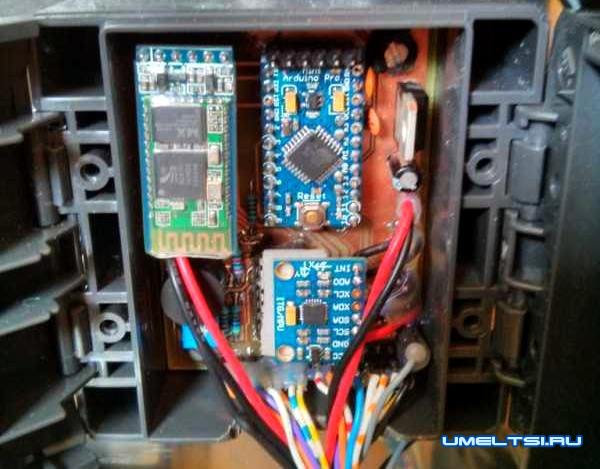
Главный элемент основной платы – Arduino Pro Mini 16 МГц, 5 В. Она позволяет считывать информацию об угле наклона с трех-осевого акселерометра и гироскопа модуля MPU-6050 (частота 500 Гц), которая впоследствии обрабатывается фильтром Калмана.

С микроконтроллером соединен и модель Bluetooth SPP. Используя специальное приложение, он подает данные на смарфтон или другой гаджет под управлением ОС Android.

2 входа операционного усилителя LM324 служат буфером, сохраняя сигнал от кнопки безопасности. С помощью диода D1 видно, что от микроконтроллера на контакт сброса не может поступить сигнал, когда работает драйвер двигателя. Вместе с тем вход Online Casino позволяет сохранить значения измерения напряжения батарей.
Один выход выступает в качестве инверсного усилителя, который усиливает сигнал от потенциометра, подключенного к рулевому механизму. Потенциометр 10 кОм используется с целью изменения напряжения на выходе до примерного показателя 2,5 В.
Внизу – изображение с готовой печатной платой и принципиальной схемой. MPU-6050 фиксируется с помощью двойной клейкой ленты, чтобы минимизировать вибрации.
Основная плата включает в себя зуммер, обеспечивающий обратную связь. Он оповещает коротким звуковым сигналом о том, что робот включен, или о том, что заряд батареек уменьшается.

В нашем случае использован драйвер Pololu High-Power Motor Driver 24 В / 23 A. Здесь предусмотрен вариант постоянного тока 23 А без теплоотвода. Те, кто разработали этот аппарат, применили присоединение к драйверам теплоотвода, чтобы увидеть, что для драйверов подходит этот ток, с учетом пикового значения тока для двигателя по характеристикам – 26,7 А. В этом случае не происходит и нагревания драйверов.


Для питания аппарата использовалась установка 3-х 6S LiPo 3000mAh. Если это параллельное подключение, то их общая емкость – 9000 mAh.
От аккумуляторной сборки исходит 25.2 V (4.2 V на банку), нужно было применять преобразователь DC-DC на основе модуля LM2596, чтобы обеспечить показатель напряжения питания контроллера 8 В.
Завершающим шагом создания балансирующего робота мастер поместил всю электронику в корпус из пластика.
Программный код получен на основе кода Balanduino (https://github.com/tkjelectronics/Balanduino), который создан на C/C, при этом использовались библиотеки и функции платформы Arduino.
Чтобы понимать архитектуру, которая используется в программе, можно ориентироваться на блок-схему внизу. Она описывает рабочий алгоритм электронной системы управления.
Источник
Как сделать гироскутер
Модные технические новинки всегда оказываются в тренде, но всё это стоит достаточно дорого. Многие люди считают, что гироскутер своими руками сделать невозможно, но это абсолютно ошибочное мнение! Умельцы легко воспроизводят даже сложную по конструкции технику. Сигвей своими руками может внешне получится очень самодельным, а другим удается почти точно воссоздать вещь. Кроме того, в интернете много текстовой и видео информации о том, как сделать самодельный гироскутер.
Что такое гироскутер?
Гироскутер — средство передвижения, работающее на принципе самобалансировки. Он строится системы гироскопических датчиков, поддерживающих баланс рабочей платформы. Другими словами, сигвей похож на обычный самокат, который движется сам за счет работающего мотора. Датчики балансировки считывают положение тела человека, тем самым достигается движение и управление — повороты, задний ход.
Гироскутер состоит из металлического корпуса с двумя равными колесами, под которой закреплена вся электроника:
- мощный электродвигатель (либо 2 штуки);
- материнская плата с микропроцессором;
- 2 вспомогательные платы;
- гироскопические датчики;
- аккумуляторная батарея.
Гироскопические датчики считывают любой наклон относительно поверхности, и отсылают сигнал на боковые платы, расположенные на платформе. Уже от них информация поступает на материнскую плату и микропроцессор — так выполняется программа балансировки.
Заводские модели имеют массу конструкционных особенностей и отличий как друг от друга, так и от самодельных вариантов: аккумуляторов может быть два, либо батарея съемная. Также оборудование сигвея с ручкой, съемными колесами и другими деталями. И, конечно, сборка электронной платы более качественная в сравнении со сделанной своими руками.
Что же нам понадобится?
Перед тем, как сделать гироскутер, понадобится собрать все нужные детали и сделать точные расчеты.
Сводный список материалов (с рекомендуемыми марками) таков:
- Беспроводной модуль управления XBee.
- Микроконтроллер arduino.
- Аккумулятор — 2 шт.
- Датчик Inven Sense MPU-6050 на модуле GY-521 (можно заменить на другую марку с аналогичными, либо близкими характеристика).
- Материал для корпуса и ручки — тонкая сталь, либо деревянный брус.
- Колеса с диаметром 26 см.
- Переключатель.
Такой минимальный набор поможет собрать сигвей своими руками. Кроме того, потребуются соответствующие инструменты в зависимости от материала корпуса. По себестоимости лучше всего сделать из дерева, но возможно использовать алюминий. Потребуется подготовить паяльную лампу со всеми необходимыми дополнениями, дрель, набор гаечных ключей, ножовку (для работы по металлу, либо дереву), плоскогубцы и простую ленту для измерения.
Производство и процесс
Первым делом разрабатывается план о том, какое именно средство передвижение необходимо сделать. Учитывается уровень высоты, вес перевозимого человека, проходимость по различным поверхностям и насколько будет хватать минимального заряда.
Подготавливается корпус — важно замерить все детали, чтобы собрать оптимальную по размерам коробку. В ней будут располагаться все детали и центр управления, по бокам — закреплены колеса, потому там нужны отверстия нужного диаметра.
Дальше следует выбрать микроконтроллер, осуществляющий управление. На рынке представлено множество моделей от разных производителей. Ориентируясь на Arduino, выберем UnoNano и чип ATmega 328. Они более дешевые в ценной категории, тогда как обладают необходимыми параметрами. Также выбираем два датчика модели InvenSense MPU 6050 на базе модулей GY-521.
Следующий шаг — безопасность, как и при работе с любой электроникой. Два аккумулятора следует подключать последовательно, чтобы получить нужное напряжение. Для установки электродвигателей необходимо подготовить мост (на него также крепятся колеса), переключатель для их включения и отключения.
Обязательно нужно учитывать тот факт, что все детали будут производить давление на платформу. Балансировка будет перенастроена при сборке и её вновь придется регулировать.
Основные характеристики проекта
Разумеется, первое что потребуется найти — два мощных электродвигателя. Следует учитывать вес человека — в частности, собственный, — чтобы и корпус выдержал, и мощности хватило. Средняя мощность у заводских моделей составляет 350Вт, на этот параметр нужно ориентироваться.
Далее — два одинаковых колеса, иначе балансировка изначально будет нарушена. Рекомендуется брать их в большом размере, отталкиваясь от минимального значения в 25-26 см в диаметре. Они также отвечают за проходимость и нужный уровень высоты: чем больше, тем выше и лучше.
Самодельные сигвеи, как правило, тяжелее заводских моделей, потому рекомендуется взять 2 аккумулятора с мощностью минимум 4400 мА/ч и более. Также оптимально использование микроконтроллеров arduino для того, чтобы добиться схожей балансировки.
Конструкция каркаса
Дальше идет корпус — его нужно создать по изначальным рассчетам, чтобы вся электроника и детали поместились внутрь. Рассмотрим создание коробки из обычного дерева. Это легкий, прочный материал, не проводящий электрический ток — значит, безопасен для человека.
Потребуется вырезать боковые стороны, платформу и низ самодельного сигвея. По бокам важно оставить отверстия для установки колес. Также подготовить рулевую палку для управления. Занявшись ей, потребуется сделать отверстия для приведения электроники в работу. Соединить их между собой, закрепив корпус на саморезы. Деревянный корпус готов.
Сбор механических деталей
Следующий шаг — собрать все механические детали, начиная с моста, на котором будут располагаться колеса. В собранный корпус сначала устанавливаются электродвигатели — таким образом, чтобы баланс соблюдался. С такой же целью ставятся аккумуляторы. Оптимально разместить их в задней части короба, чтобы они компенсировали вес двигателей.
Электрическая схема
Согласно приведенной схеме собирается вся электроника. Все провода подключаются прямо в корпусе. Выводы микроконтроллера подключаются к схеме управления двигателя и датчикам.

Программное обеспечение
Программное обеспечение выпускается вместе с микроконтроллером, его также можно скачать в интернете. Для проверки работоспособности рекомендуется использовать Arduino Terminal. После проведения настройки, поддается питание на контроллер и сигвей переходит в режим ожидания.
Устанавливается считывающее информацию устройство, чтобы вся информация собиралась на Sd-карту и было легко выявить любые неполадки в работе.
Драйвер мотора
Для управления электродвигателями, понадобится устройство, преобразовывающее сигналы мощности в токи. Драйвер мотора является обычной небольшой микросхемой, которая устанавливается по приведенной выше схеме.
Определение угла
Следующая схема показывает установку датчиков наклона и управления. Первый устанавливается горизонтально, второй, соответственно, вертикально. Таким образом, гироскутер должен отключаться и прекращать движение при наклоне более 45 градусов.
Пид контроллер
Важный момент при настройке: правильно усилить ПИД-регулятор. Именно от этого параметра зависит мощность всего устройства. Настройка ПИД-регулятора происходит через вычисление его параметров на основе собранной модели. Рассчитать их поможет уже приведенная выше программа.
Тестирование и настройка
Производится настройка ПИД-регулятор и микроконтроллера. Для этого загружается исходный код, который позволяет начать работу. Проверяется взаимосвязь между датчикам управления и балансировки.
Параметр, отвечающий за балансировку, — Kp. Чем выше, тем хуже нестабильное состояние самодельного гироскутера. Для настройки нужно просто уменьшать его до нужного уровня, чтобы достичь самобалансировки устройства.
Параметр ускорения — Ki, — также меняется при настройке. Скорость должна уменьшаться при низком наклоне и увеличиваться, если рулевая палка отклоняется сильнее.
Следующий параметр настройки — Kd. Он отвечает за режим ожидания: платформа возвращается в ровное состояние, а движение останавливается. Сигвей остается на месте.
Порядок сборки сигвея
Таким образом, последовательность работы по сборке сигвея своими руками будет следующей:
- Подготовка корпуса по замеренным размерам.
- Расположение моста.
- Установка электродвигателей.
- Крепление ручки к корпусу.
- Монтаж гироскопических датчиков по краям корпуса на платы.
- Установка микроконтроллера.
- Настройка и тестирование.
После того, как настройка завершена, можно хвастаться новым изобретением перед друзьями.
Видео: как делают segway (гироскутер)
Видеоролики, наглядно показывающие сборку гироскутера своими руками.
Похожие изделия
Наиболее близкое изделие — ховерборд. Единственное видимое отличие состоит в отсутствии рулевого столба, тогда как гироскутер управляется именно за счет ручек. Кроме того, на сигвей сильно похожи обычные самокаты.
Таким образом, можно собрать гироскутер своими руками. Главное, чтобы итоговая стоимость деталей и затрат на всё остальное не превысила цену заводской модели. Самодельный сигвей при правильной настройке будет отличной новинкой во дворе и поводом похвастаться перед друзьями.
Источник



