
Как собрать экзоскелет своими руками
База самоделок для всех!
Крутая самоделка — силовой экзоскелет своими руками
Это пневматический экзоскелет с очень прочным стальным каркасом. Для этого скелета нам понадобится сварка (совсем немного), дрель и отрезная. Обшивка была нарезана на чпу фрезе. Ну, и немного стали.
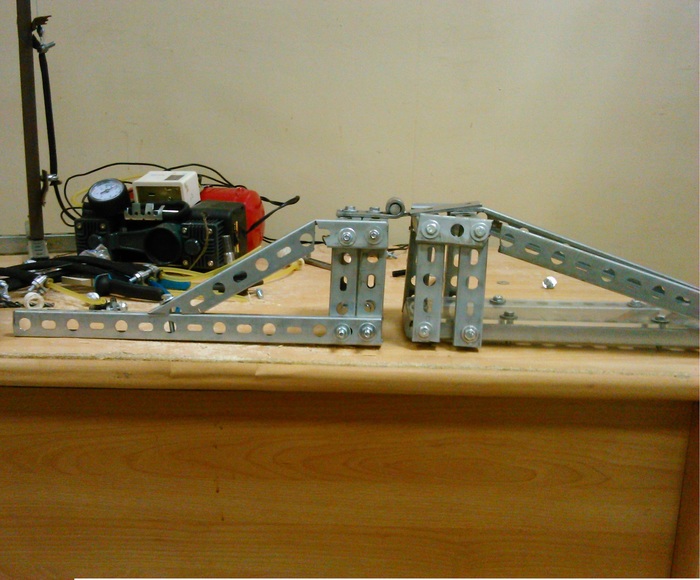
Начнем мы с каркаса рук.
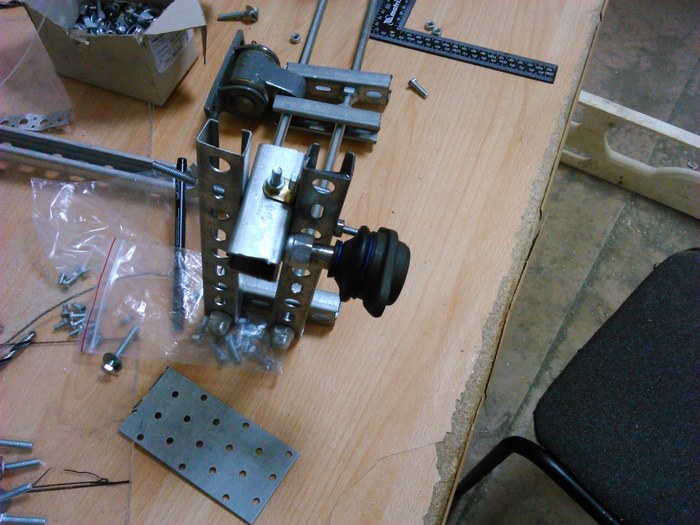
Весь каркас мы делаем из стального профиля. Он хорошо обрабатывается и благодаря многочисленным отверстиям очень удобен для соединения. Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6 мм.
Или же сбоку. Внизу будет установлена дуга из ПЭТа.
Все элементы подгоняются под конкретную руку поэтому о каких- то точных размерах сказать сложно. В моем случае основа этого элемента делалась из цельного куска в 1 метр и перегибалась под 90 градусов через 45-10-45 см.
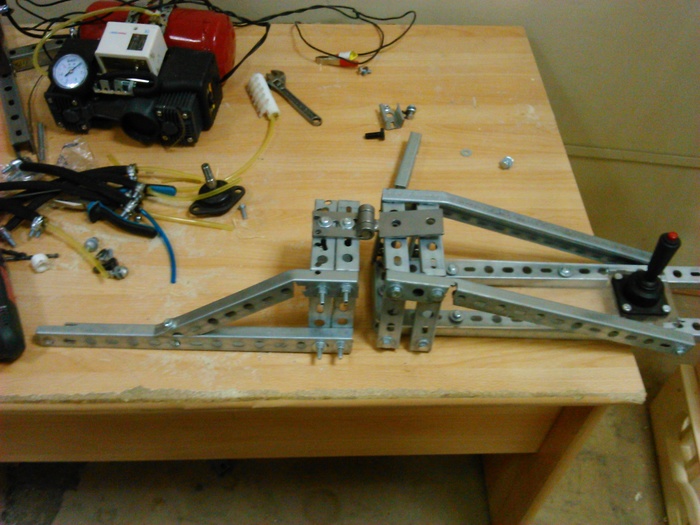
Второй элемент идет от локтя до плеча. Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Вот так выглядит это всё сверху.
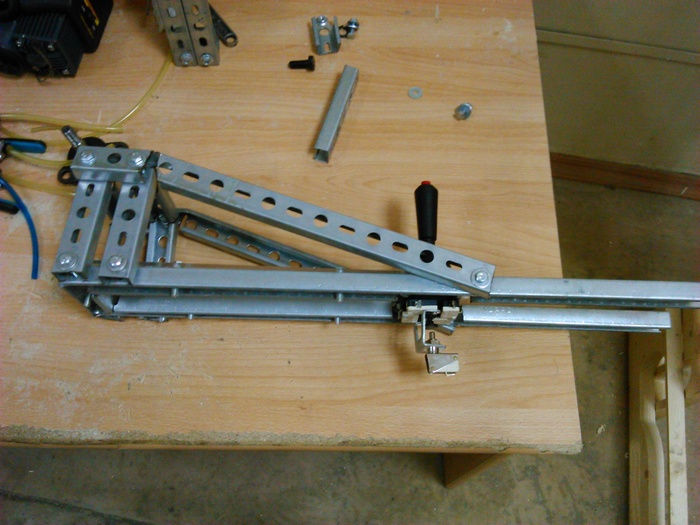
Или сбоку. Если есть небольшие «перепилы» как у меня это не страшно. На сталь в слабых местах всегда можно наварить нужные элементы. Для этого участка понадобится примерно 1,5 метра стального профиля.
Вот так рука крепится к шаровой опоре, которая служит тут плечевым суставом. Довольно мощный и подвижный элемент. Крепится эта опора на 2 насквозь проходящие через весь каркас шпильки на 10 мм.

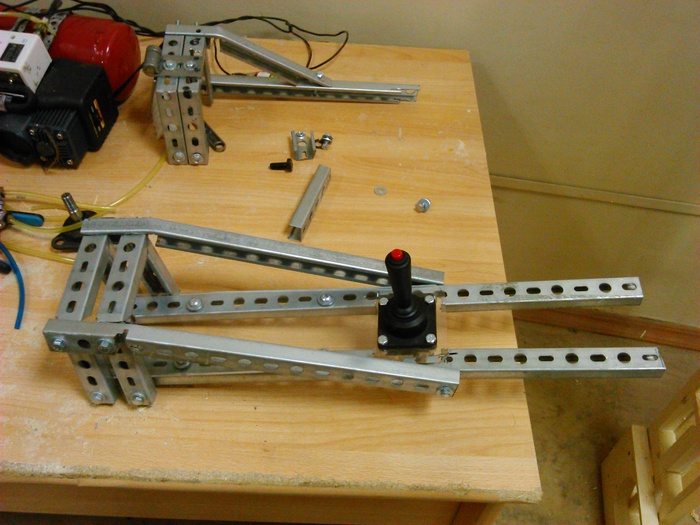
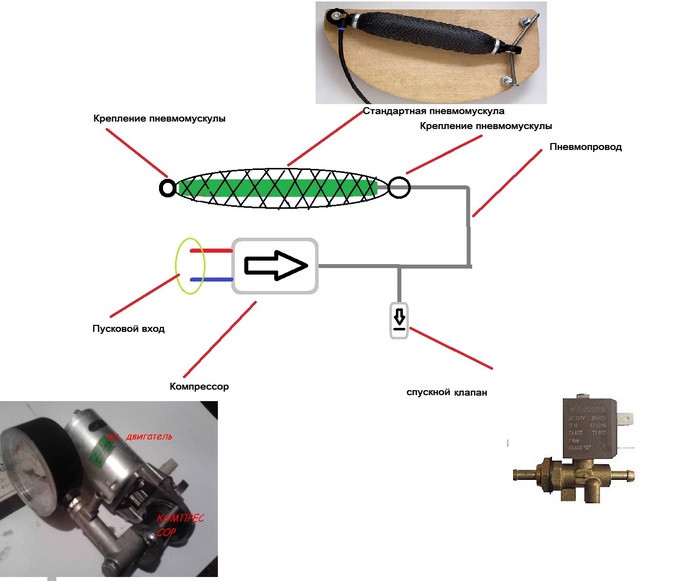
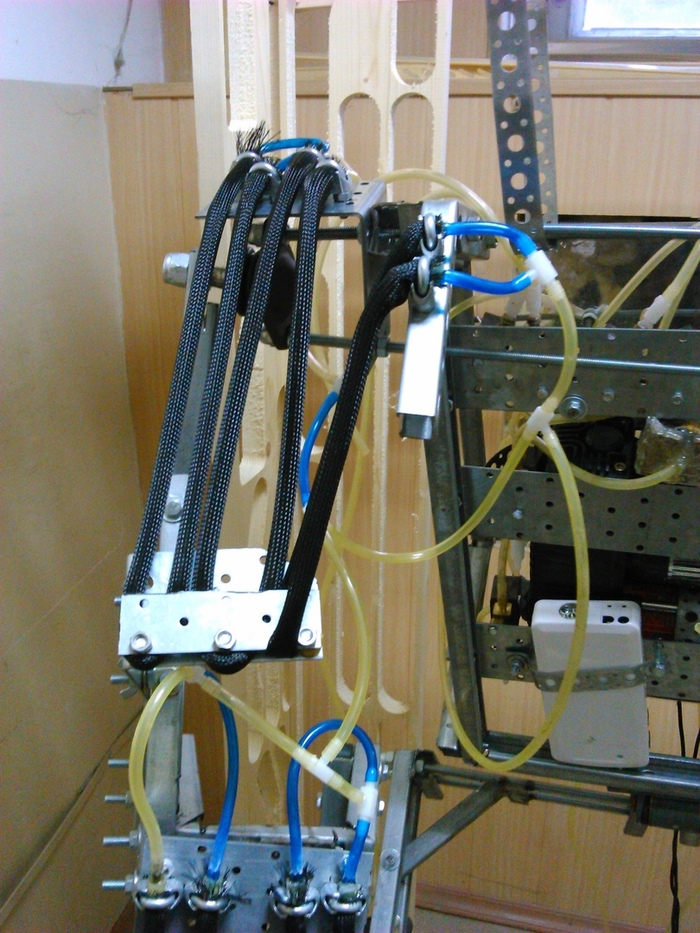
Сделаем 5-6 штук 20 см пневмомускул. Со стороны джойстика устанавливаем стальную пластину. Примерно на расстоянии 3 см от конца петли.
На эту пластину и на другой конец каркаса и крепим мускулы. Если отверстий будет не хватить — сверлим. Всё равно всё это будет ещё покрываться пластиком.
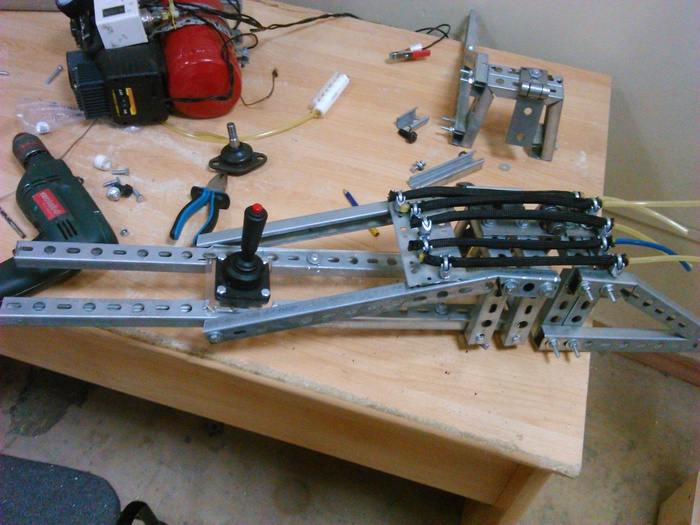
Сверху это выглядит вот так. Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
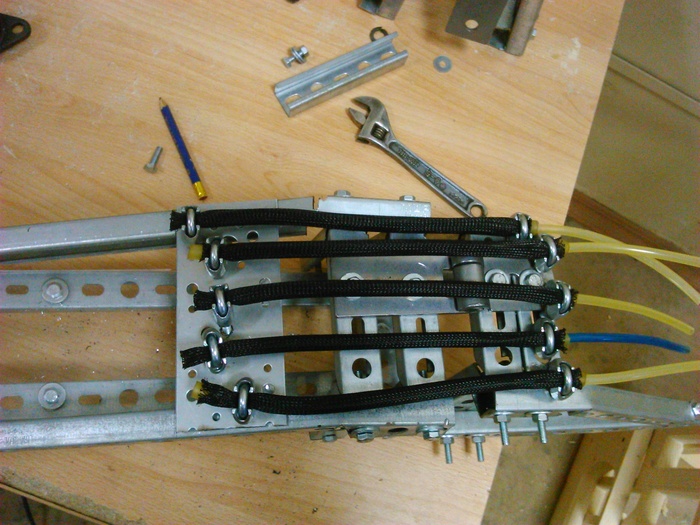
Также, при подборе элементов и нужного градуса изгиба, нужно учитываться что мускулы сокращаются примерно на 1/3.

Так же делается и вторая рука. Вместо двух штырей на конец можно приделать всё что угодно. Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
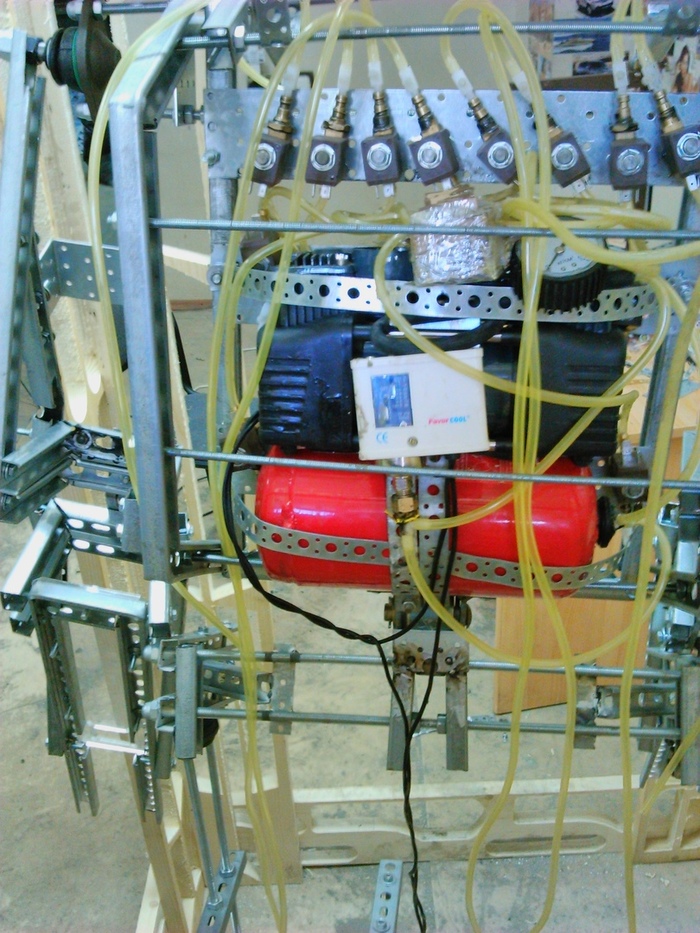
Следующий элемент это грудная основа с пнематикой. Это наиболее сложный и тяжелый элемент т.к. очень много элементов.
Сначала покажу как это должно выглядеть в конце.
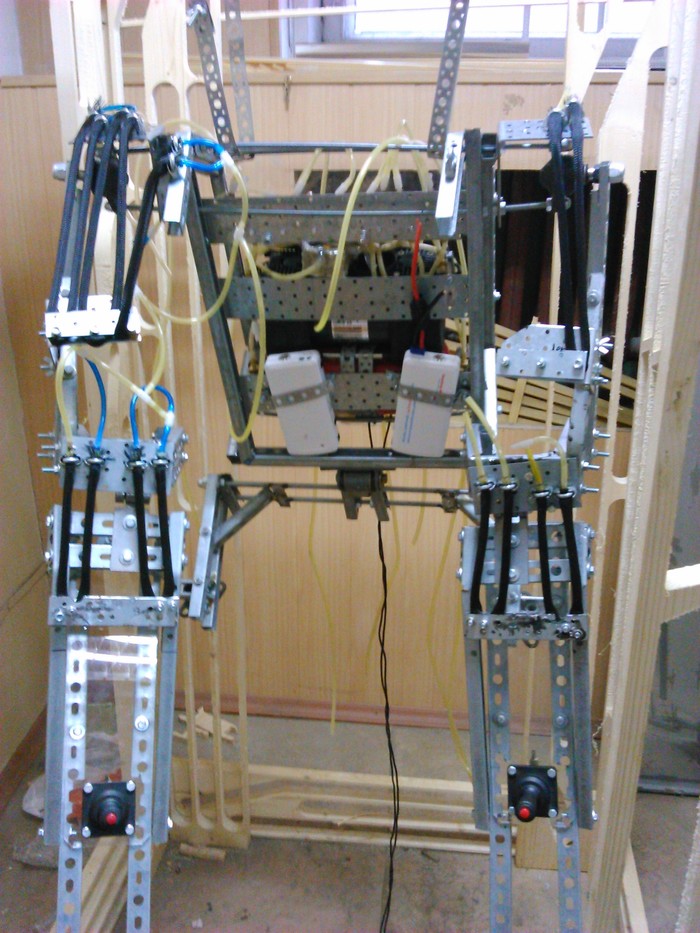
Можно увидеть огромное количество зеленых трубок пневмопровода, мускулы, клапана, аккумуляторы.
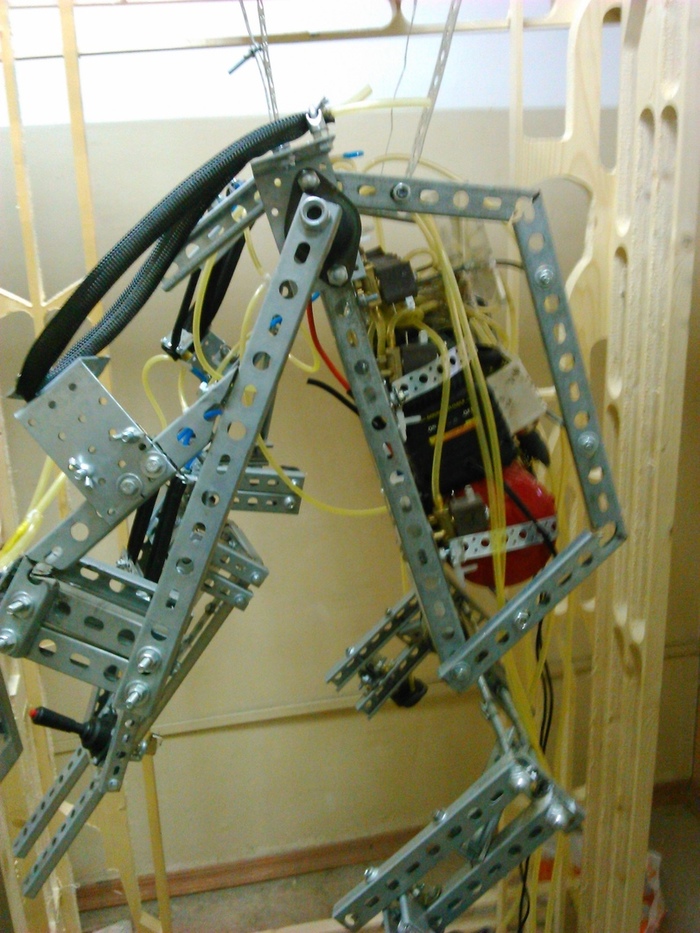
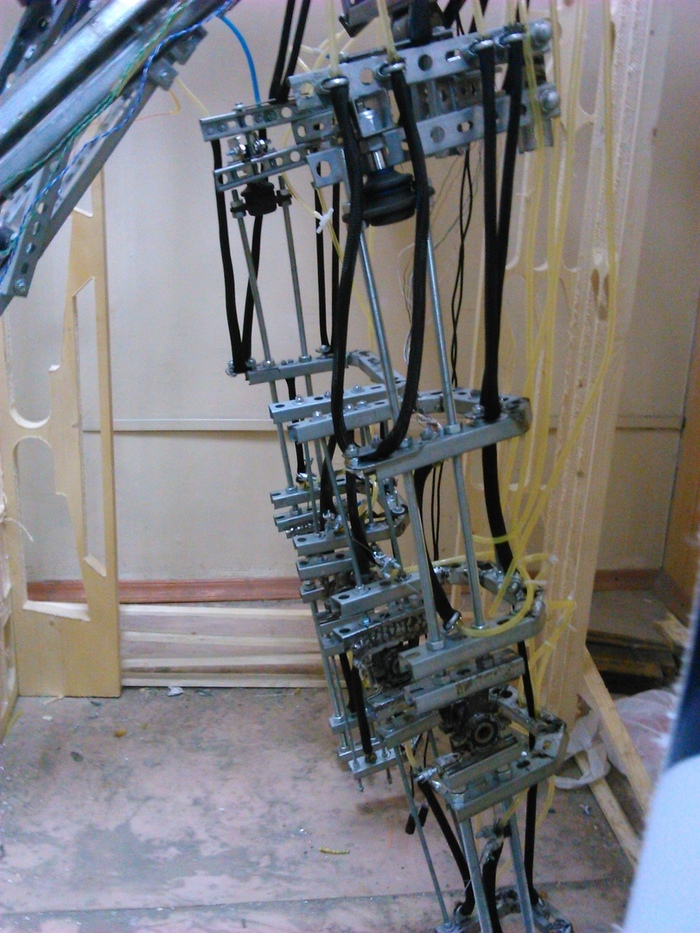
Основу каркаса спины мы также делаем из стального профиля. Состоит он из 2 пропиленных и изогнутых элементов по 1 метру и одного «П» образного элемента 60-30-60. Всё это прошивается шпильками нужной длины. Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Сбоку это выглядит вот так. Все зажимается и соединяется болтами — никакой сварки. Так потом проще что-то снимать и подгонять, а это точно нужно будет делать не раз.
Бедра состоят из 4 элементов профиля длиной 20 см, 2 элементов из профиля длиной 10 см и 2 мощные шпильки на 12 мм, которые и соединяют все это. К спине бедра крепятся через очень мощную петлю.

Ноги также крепятся через шаровую опору. Она устанавливается через 5 см кусок профиля. Это элемент зажимается 20 см кусками профиля через шпильку. Должно быть что-то типа вот такого. Это прочно и подвижно получается.
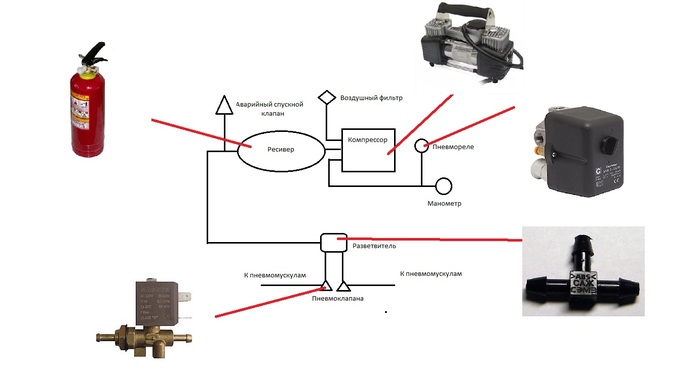
А теперь самое сложное — пневматика.
Будем использовать стандартную полную схему. Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Есть более простой, но менее эффективный вариант.
Приводы те же, но вся пневматика будет раз в 10 меньше. и во столько же раз неэффективней.
Но мы делаем первый вариант.
Сначала соединяем распределитель, ресивер, компрессор и пневмореле в 1 модуль. Так будет значительно удобней.
Ресивер сделан из обычного огнетушителя на 3 литра. Компрессор — двухцилиндровый для накачки шин. Клапана от полуавтоматической сварки для СО. Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Питание выводим через пневмореле на какой-нибудь мощный переключатель (На 25А) и на аккумуляторы.
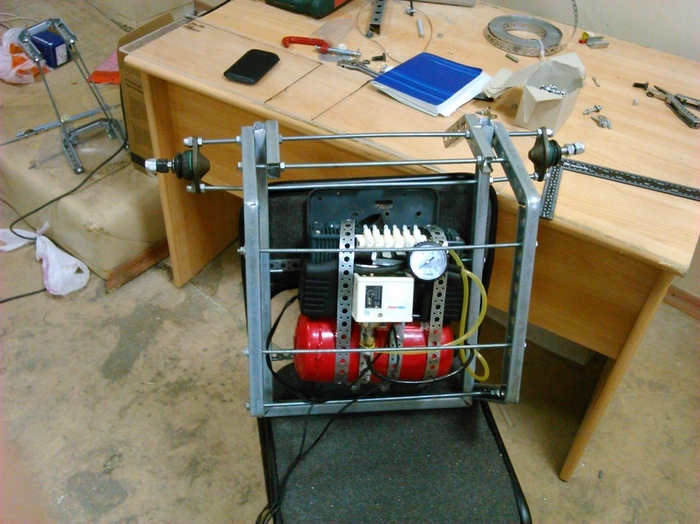
На передней части ставим 3 стальные пластины по 30 см. На них мы будем крепить компрессорный модуль и клапана. Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.

Крепим на пластину клапана. Учитываем что на каждую группу мышц нужно 2 клапана — для активации и для спуска.

Все выходные трубки каждого активационного клапана подключаем к распределителю. Распределитель это по сути пневматический тройник. В него идет относительно толстый шланг от ресивера, а с него выходит много тонких трубок. Можно обойтись и без него, но понадобится просто огромное количество тройников от омывателя.
Кроме локтевого привода есть ещё привод на плече. Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Второй уголок крепится уже на руку. Важно так подобрать длину мышц и расположение уголка чтобы при полностью расслабленных мышцах рука свободно висела. Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
Осталось сделать ноги с обшивкой и экзоскелет готов!
Самая сложная часть ноги это коленный сустав. Вот так он выглядит. Их нужно сделать 4 шт. Соединяется он с помощью сварки.

Фотография несколько смазана, но принцип увидеть можно. Это просто подшипник в зажиме и ограничитель хода. К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
Если не делать ограничение хода то появляется вероятность повреждения ноги пилота.
Каркас ноги состоит из 4 подковообразных элементов. Все их размеры также подгоняются под конкретного человека. Все 4 элемента имею разные размеры. Скрепляется всё шпильками 10-12 мм, причем выводим 2 шпильки на длину бедра. Через них нога и будет крепится к шаровой опоре бедра.

Вариантов как сделать ступни было 2. Первый состоял в использовании уже готового элемента.
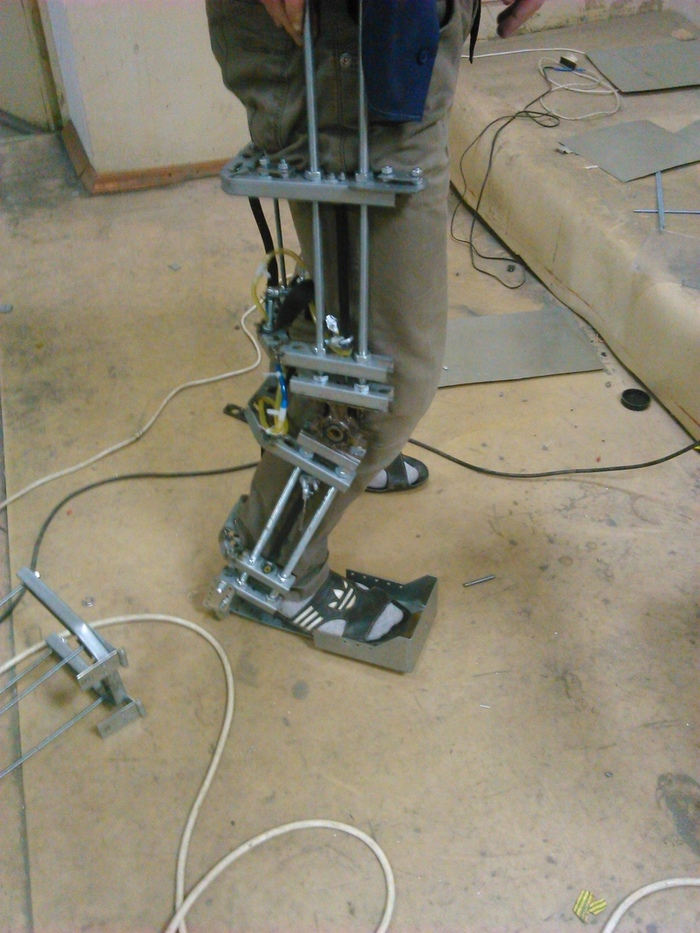
Это был более простой и быстрый способ. Для такой ступни нужно было только 4 элемента: Один стальной держатель для бруса, стальная пластина под ступню и 2 уголка для крепление к ноге. Крепится все должно было с помощью обычных портфельных шлейфов и замков.
Второй вариант заключался в изготовлении из пластин более аэргономичной конструкции. На этом варианте мы и остановились.

В этой ступне все элементы это просто 4 мм сталь, изогнутая и подогнанная под ногу. Элементы провариваются.
Ноги также имеют приводы. По 2 на ногу. Они позволяют удерживать статичное состояние или же подняться. Одна группа мышц расположена в бедре и тянется от каркаса бедра к верхней подкове ног. Мышцы как бы тянет вперед ногу.
Вторая группа мышц расположена прямо в каркасе ноги. Эта группа при активации «стягивает» ногу. Шланги идут к спине, к клапанной группе.
Управление ногами осуществляется через кнопки расположенные в «лодыжке». Т.е. мы тянем ногу назад и нажимаем кнопку.
Как и в случае с рукой ведем провода к клапанам. Руки используют только 2 из 5 контактов джойстиков поэтому можно приделать какое-то оборудование. Или же перевести управление ног на руки.
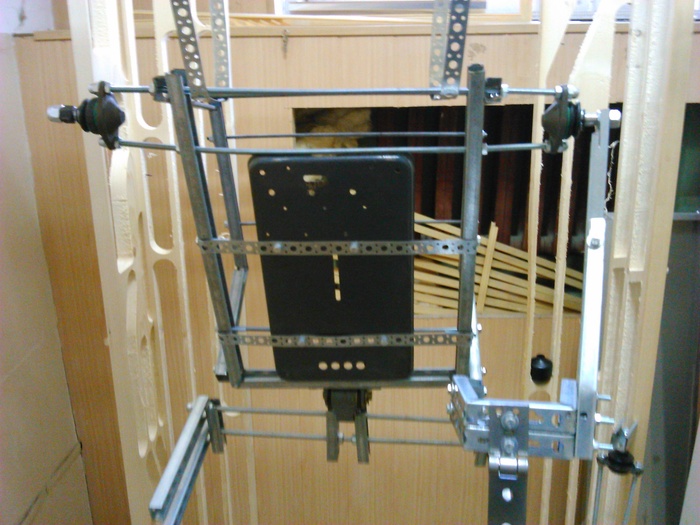
Для зашиты всей пневматики от повреждений и защиты пилота от пневматики весь экзоскелет покрывался противоударным ПЭТом.
ПЭТ это что-то типа толстого спрессованного полиэтилена. Является антивандальным покрытием. Покрываем пластиком места непосредственного расположения пневматики и участки контакта с пилотом. Крепим саморезами и болтами.

В обшивку ног устанавливаем кнопки для управления. Тут их лучше видно. Верхние кнопки управляют бедренными приводами. Провода и трубки лучше поместить в какую нибудь гофру или же другой шланг — их так много что велика вероятность случайно задеть.

Для того чтобы экзоскелет можно было легко одевать и снимать в качестве держателей пилота используем портфельные лямки.

Скелет готов! Само собой это не 146% точное руководство по сборке т.к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
Источник
Экзоскелет своими руками. Как сделать экзоскелет сталкера
Экзоскелетом называется внешний каркас, который позволяет человеку совершать поистине фантастические действия: поднимать тяжести, летать, бегать с огромной скоростью, совершать гигантские прыжки и т .д. И если вы думаете, что такими устройствами обладают только главные герои «Железного человека» или «Аватара», то вы глубоко ошибаетесь. Они доступны человечеству еще с 60-х гг. прошлого века; более того, вы можете узнать, как собрать экзоскелет своими руками! Впрочем, обо всем по порядку.
Экзоскелет: знакомство
Сегодня вы вполне можете приобрести себе экзоскелет — подобную продукцию выпускает Ekso Bionics и Hybrid Assistive Limb (Япония), Indego (США), ReWalk (Израиль). Но только если у вас есть лишние 75-120 тысяч евро. В России же пока производятся только медицинские экзоскелеты. Их проектирует и выпускает компания «Экзоатлет».
Первый экзоскелет своими руками изготовили ученые корпораций General Electric и United States Military еще в шестидесятых годах прошлого века. Он назывался Hardiman и мог свободно поднять в воздух груз, предельно равный 110 кг. Надевший же это устройство человек в процессе испытывал нагрузку, как при поднятии 4,5 кг! Только вот сам Hardiman при этом весил все 680 кг. Оттого он и не пользовался большим спросом.

Все экзоскелеты подразделяются на три типа:
Современные робокостюмы весят от 5 до 30 и выше кг. Они бывают как активными, так и пассивными (работающими только по команде оператора). По предназначению экзоскелеты делятся на военные, медицинские, промышленные и космические. Рассмотрим самые замечательные из них.
Самые впечатляющие экзоскелеты современности
Собрать такие экзоскелеты своими руками дома в ближайшее время, конечно, не получится, однако познакомиться с ними стоит:
- DM (Dream machine). Это полностью автоматический гидравлический экзоскелет, который управляется голосом своего оператора. Устройство весит 21 кг и способно выдерживать человека весом до центнера. Пока что используется для реабилитации пациентов, которые не могут ходить вследствие заболеваний ЦНС или иных нейромышечных болезней. Примерная стоимость — 7 млн рублей.
- Ekso GT. Миссия этого экзоскелета та же, что и у предыдущего — он помогает людям с патологиями моторных функций ног. Характеристики схожи с предыдущим, цена — 7,5 млн рублей.
- ReWalk. Призван вновь подарить движение людям с параличом нижних конечностей. Весит устройство 25 кг и способно работать без подзарядки 3 часа. Экзоскелет доступен в Европе и США в сумме, эквивалентной 3,5 млн рублей.
- REX. Сегодня это устройство можно купить и в России за 9 млн рублей. Экзоскелет дарит людям с параличом ног не только самостоятельную ходьбу, но и возможность встать/сесть, повернуться, пойти «лунной походкой», спуститься по лестнице и т.д. REX управляется джойстиком, способен функционировать без подзарядки весь день.
- HAL (Hybrid Assistive Limb). Существует в двух вариантах — для рук и для рук/ног/торса. Данное изобретение позволяет оператору поднять вес в 5 раз тяжелее предельного для человека. Также применяется для реабилитации парализованных людей. Весит этот экзоскелет всего 12 кг, а его зарядки хватает на 1,0-1,5 ч.

Как сделать экзоскелет своими руками: Джеймс Hacksmith Хобсон
Первым и пока единственным человеком, сумевшим сконструировать экзоскелет во внелабораторных условиях, является канадский инженер Джеймс Хобсон. Изобретатель собрал устройство, которое позволяет ему свободно поднимать в воздух 78-килограммовые шлакоблоки. Работает его экзоскелет на пневмоцилиндрах, которые снабжает энергией компрессор, а управляется устройство при помощи пульта.
Канадец не держит в секрете свое изобретение. Как собрать экзоскелет своими руками по его примеру, вы можете узнать на сайте инженера и на его канале на «Ютуб». Однако учтите, что тяжесть веса, поднимаемого таким экзоскелетом, ложится исключительно на позвоночник оператора.

Экзоскелет своими руками: примерная схема
Подробной инструкции, позволяющей в легкую собрать экзоскелет дома, нет. Однако понятно, что для него будет нужен:
- каркас, отличающийся прочностью и подвижностью;
- гидравлические поршни;
- барокамеры;
- вакуумные насосы;
- источник питания;
- прочные трубки, способные выдержать высокое давление;
- компьютер для управления;
- датчики;
- софт, позволяющий отправлять и преобразовывать сведения с датчиков для нужной работы клапанов.

Как будет примерно работать эта композиция:
- Один насос должен увеличивать давление в системе, другой — уменьшать.
- Работа клапанов зависит от давления в барокамерах, повышение/понижение которого и будет управлять системой.
- Расположение датчиков (против движения конечностей): шесть — руки, четыре — спина, три — ноги, два стопы (всего более 30).
- Компьютерное обеспечение должно исключить давление на датчики.
- Сигналы датчиков нужно подразделить на условные (информация с них полезна, если безусловный датчик не «говорит» о испытываемым им давлении) и безусловные. Условность/безусловность этих элементов может определять, например, акселерометр.
- Руки экзоскелета — трехпалые, отделенные от запястья оператора, — чтобы исключить травмы и придать дополнительную прочность.
- Источник питания выбирается после сборки и пробной апробации экзоскелета.
Роботизированные костюмы, пока что только в сфере реабилитации, уже начинают входить в нашу жизнь. Появляются изобретатели, способные соорудить такое устройство вне лаборатории. Вполне возможно, что в ближайшем будущем любой школьник сможет собрать экзоскелет Сталкера своими руками. Уже можно предсказать, что за такими системами — будущее.
Источник



