
Как сделать экзоскелет своими руками чертежи
База самоделок для всех!
Крутая самоделка — силовой экзоскелет своими руками
Это пневматический экзоскелет с очень прочным стальным каркасом. Для этого скелета нам понадобится сварка (совсем немного), дрель и отрезная. Обшивка была нарезана на чпу фрезе. Ну, и немного стали.
Начнем мы с каркаса рук.
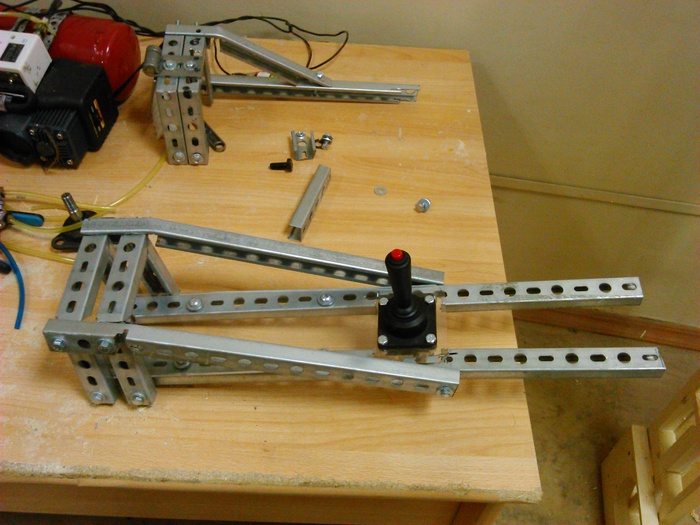
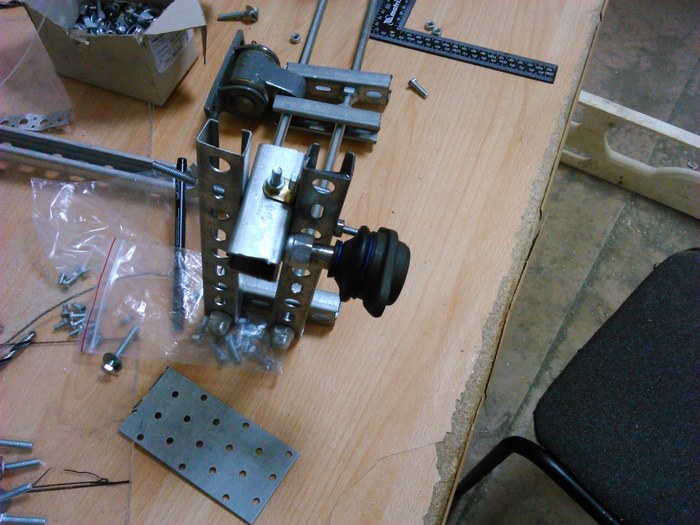
Весь каркас мы делаем из стального профиля. Он хорошо обрабатывается и благодаря многочисленным отверстиям очень удобен для соединения. Для первого элемента (на фото) нужно примерно 2 метра стального профиля, джойстик, кусок оргстекла и 18 болтов с гайками на 6 мм.
Или же сбоку. Внизу будет установлена дуга из ПЭТа.
Все элементы подгоняются под конкретную руку поэтому о каких- то точных размерах сказать сложно. В моем случае основа этого элемента делалась из цельного куска в 1 метр и перегибалась под 90 градусов через 45-10-45 см.
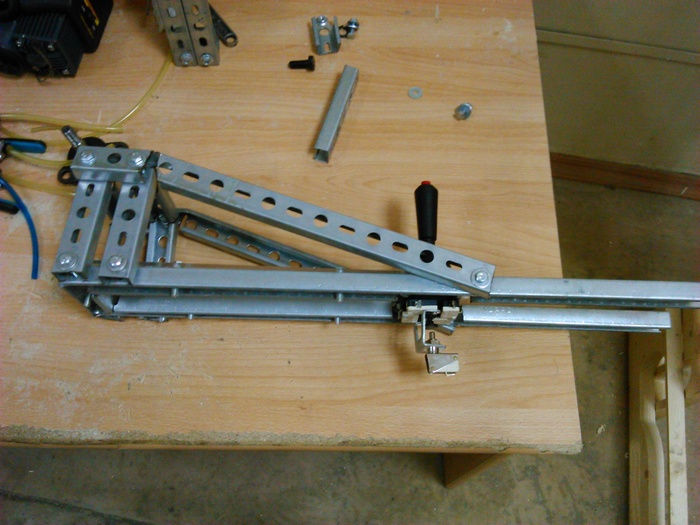
Второй элемент идет от локтя до плеча. Его размеры также подгоняются под конкретного пилота, но важно учитывать что именно через это элемент будет одевать вся рука и поэтому его нужно сделать чуть свободней, чем нужно. Суставом и соединителем тут служит очень мощная петля. Само собой можно нагородить и нормальные локти из подшипников, но тут это будет лишнее. На каждую руку нужно будет по 2 петли. Крепятся они также на 6 мм болты.
Вот так выглядит это всё сверху.
Или сбоку. Если есть небольшие «перепилы» как у меня это не страшно. На сталь в слабых местах всегда можно наварить нужные элементы. Для этого участка понадобится примерно 1,5 метра стального профиля.
Вот так рука крепится к шаровой опоре, которая служит тут плечевым суставом. Довольно мощный и подвижный элемент. Крепится эта опора на 2 насквозь проходящие через весь каркас шпильки на 10 мм.

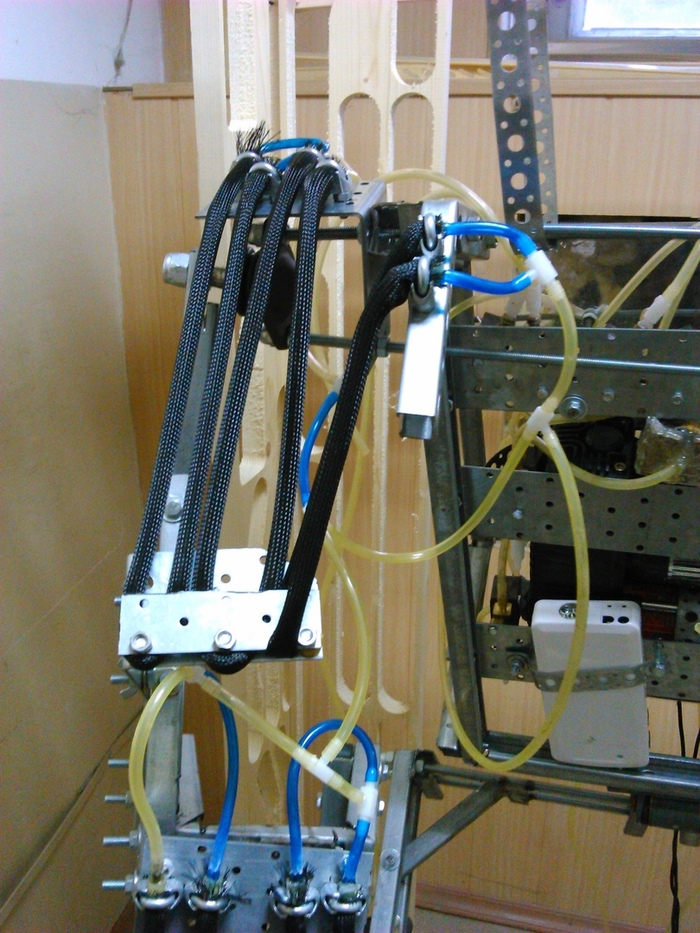
Сделаем 5-6 штук 20 см пневмомускул. Со стороны джойстика устанавливаем стальную пластину. Примерно на расстоянии 3 см от конца петли.
На эту пластину и на другой конец каркаса и крепим мускулы. Если отверстий будет не хватить — сверлим. Всё равно всё это будет ещё покрываться пластиком.
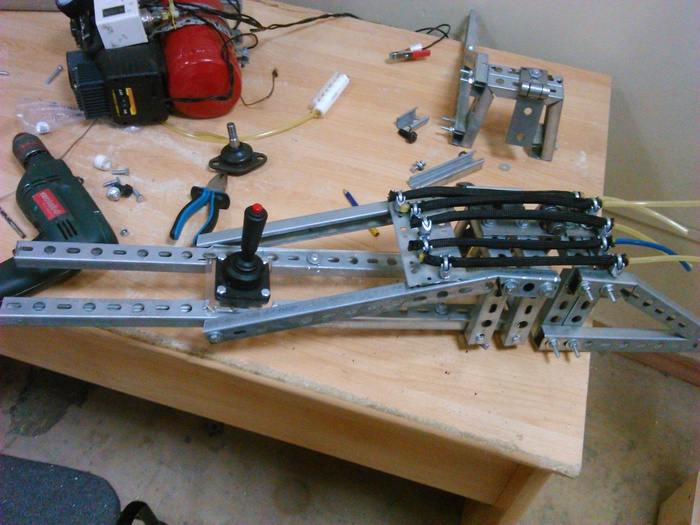
Сверху это выглядит вот так. Нужно так подобрать расположение пластины и длины мышц чтобы при полном их расслаблении рука была полностью прямой и дальше не двигалась. Только на изгиб и только при активации мускулов.
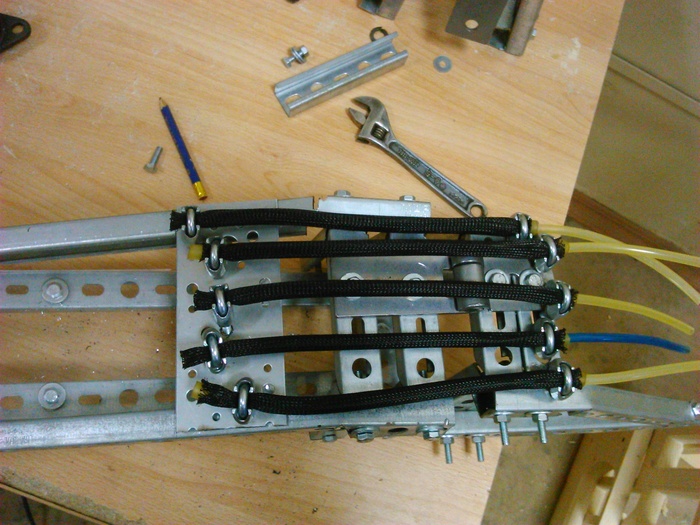
Также, при подборе элементов и нужного градуса изгиба, нужно учитываться что мускулы сокращаются примерно на 1/3.

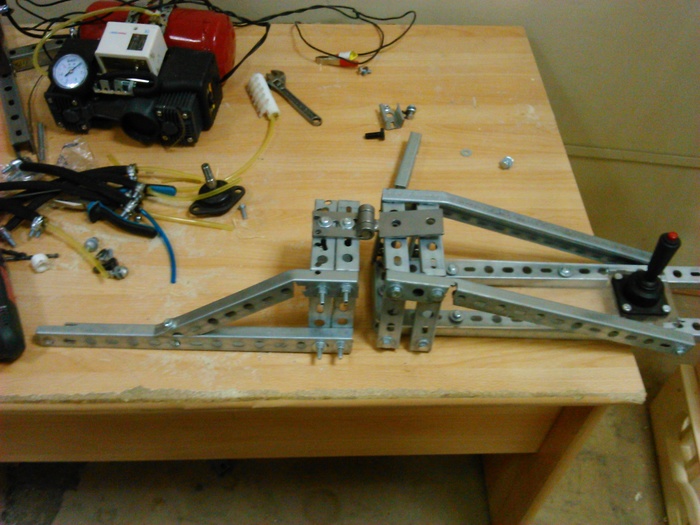
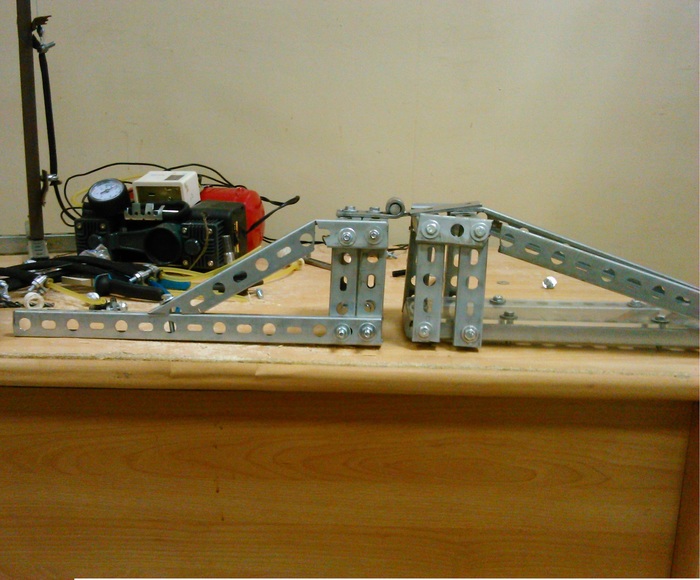
Так же делается и вторая рука. Вместо двух штырей на конец можно приделать всё что угодно. Там место много и благодаря большому количеству отверстий на профиле можно приделать хоть манипулятор, хоть крюк.
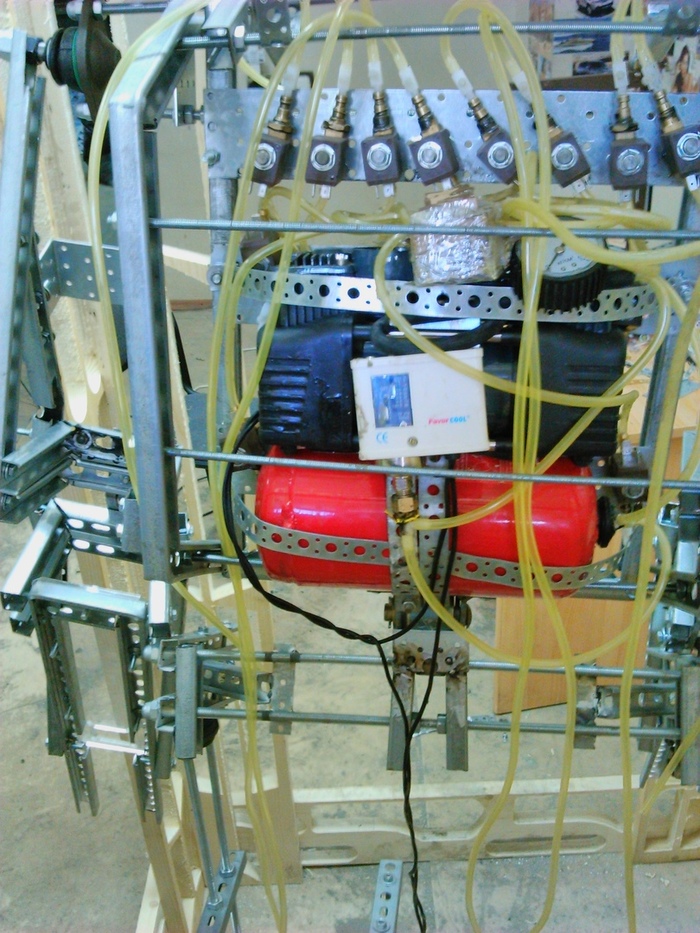
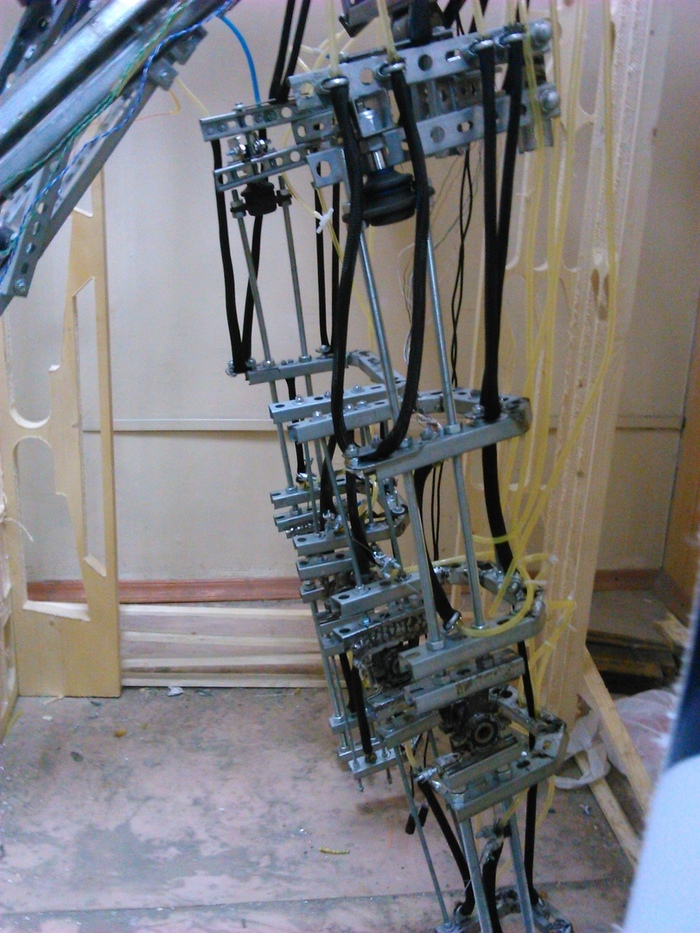
Следующий элемент это грудная основа с пнематикой. Это наиболее сложный и тяжелый элемент т.к. очень много элементов.
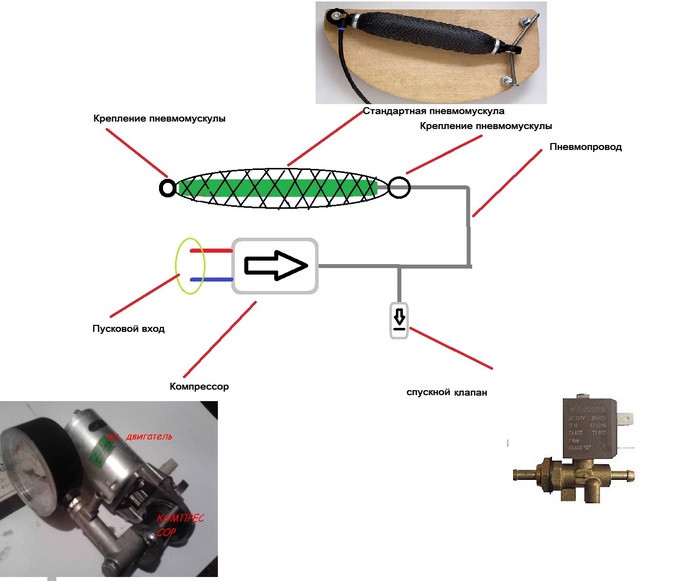
Сначала покажу как это должно выглядеть в конце.
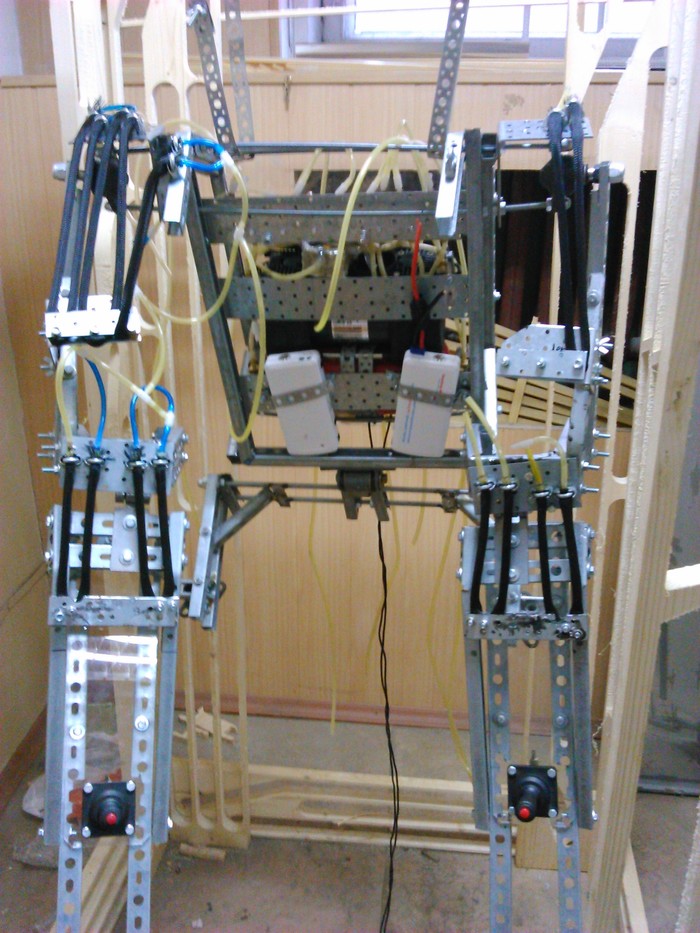
Можно увидеть огромное количество зеленых трубок пневмопровода, мускулы, клапана, аккумуляторы.
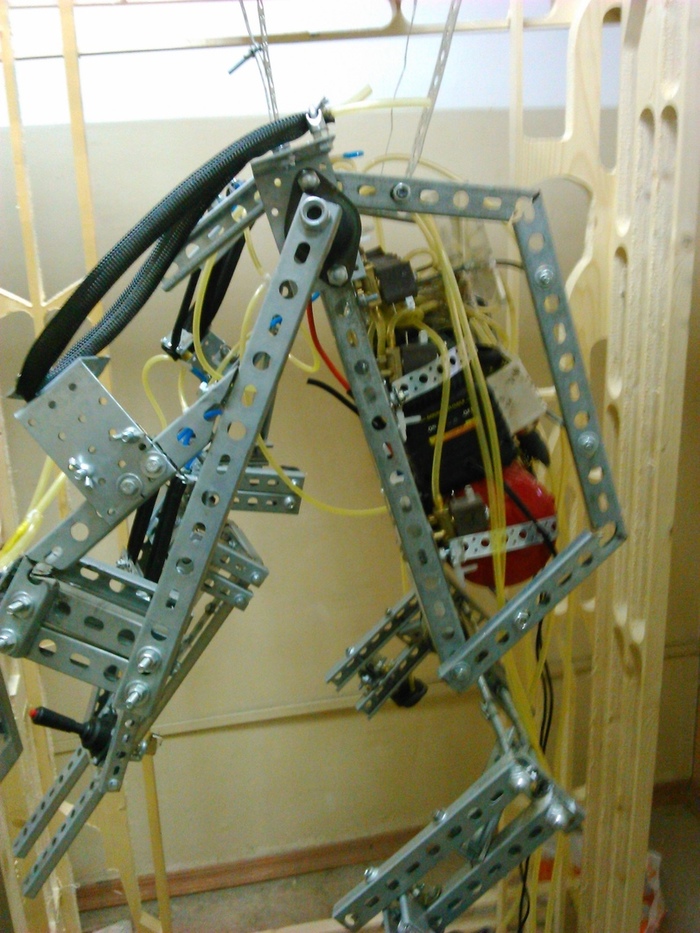
Основу каркаса спины мы также делаем из стального профиля. Состоит он из 2 пропиленных и изогнутых элементов по 1 метру и одного «П» образного элемента 60-30-60. Всё это прошивается шпильками нужной длины. Я брал по 50 см плечевые и по 35 см которые сшивают по ширине. Вот так это выглядит спереди.
Сбоку это выглядит вот так. Все зажимается и соединяется болтами — никакой сварки. Так потом проще что-то снимать и подгонять, а это точно нужно будет делать не раз.
Бедра состоят из 4 элементов профиля длиной 20 см, 2 элементов из профиля длиной 10 см и 2 мощные шпильки на 12 мм, которые и соединяют все это. К спине бедра крепятся через очень мощную петлю.

Ноги также крепятся через шаровую опору. Она устанавливается через 5 см кусок профиля. Это элемент зажимается 20 см кусками профиля через шпильку. Должно быть что-то типа вот такого. Это прочно и подвижно получается.
А теперь самое сложное — пневматика.
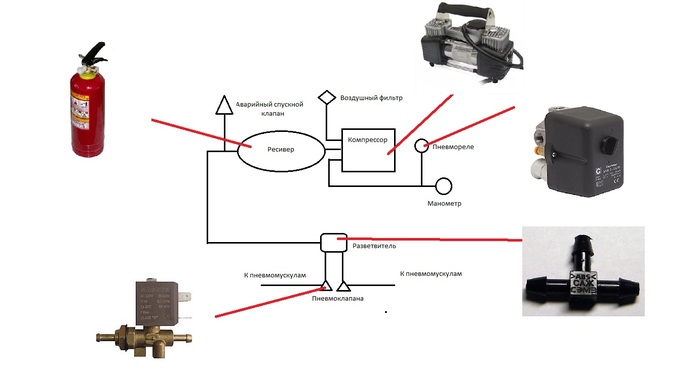
Будем использовать стандартную полную схему. Она состоит из следующих элементов:16 пневмоклапанов, тройники, компрессор , пневмореле, ресивер, 8 групп пневмомускул, распределитель на все группы и 2 аккумулятора. Устанавливать её будем в спине.
Есть более простой, но менее эффективный вариант.
Приводы те же, но вся пневматика будет раз в 10 меньше. и во столько же раз неэффективней.
Но мы делаем первый вариант.
Сначала соединяем распределитель, ресивер, компрессор и пневмореле в 1 модуль. Так будет значительно удобней.
Ресивер сделан из обычного огнетушителя на 3 литра. Компрессор — двухцилиндровый для накачки шин. Клапана от полуавтоматической сварки для СО. Пневмореле -фреоновое. Давление на нем устанавливаем в пределах 2-5 атм. Больше давление — больше сила и резкость, но меньше стабильность. Это уже дело вкуса.
Питание выводим через пневмореле на какой-нибудь мощный переключатель (На 25А) и на аккумуляторы.
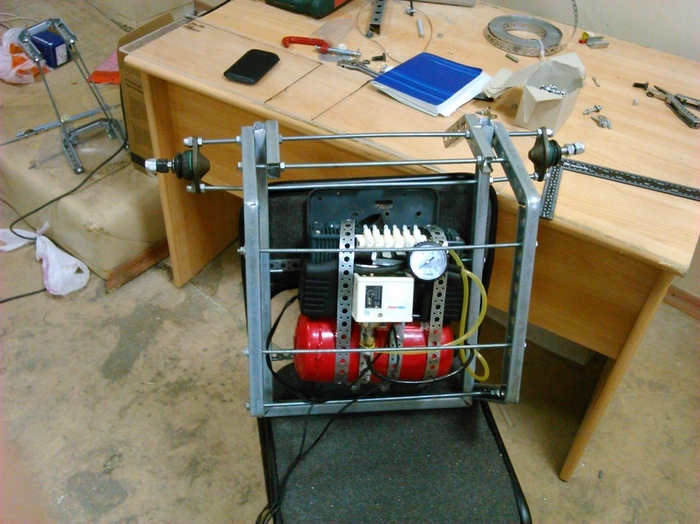
На передней части ставим 3 стальные пластины по 30 см. На них мы будем крепить компрессорный модуль и клапана. Также они дают дополнительную жесткость всей конструкции. Их можно наварить или же как я просто закрутить болтами дабы потом можно было снимать/подгонять.

Крепим на пластину клапана. Учитываем что на каждую группу мышц нужно 2 клапана — для активации и для спуска.

Все выходные трубки каждого активационного клапана подключаем к распределителю. Распределитель это по сути пневматический тройник. В него идет относительно толстый шланг от ресивера, а с него выходит много тонких трубок. Можно обойтись и без него, но понадобится просто огромное количество тройников от омывателя.
Кроме локтевого привода есть ещё привод на плече. Он позволяет ещё больше поднять руки. Для плеча нам понадобится 2 стальных уголка 10*10 см, 6 пневмомускул и небольшая стальная пластина для фиксации мышц. Первый уголок мы зажимаем между шаровой опорой и каркасом. На этот уголок крепим мышцы. Часть мышц крепим напрямую к каркасу. Это даст и дополнительную связку каркас-рука и не даст руке во время активации мышцы уехать в бок.
Второй уголок крепится уже на руку. Важно так подобрать длину мышц и расположение уголка чтобы при полностью расслабленных мышцах рука свободно висела. Удобно все сменные и подгоняемые элементы крепить на барашки. Это очень сильно ускорит первичную сборку,а потом уже можно и на обычные гайки.
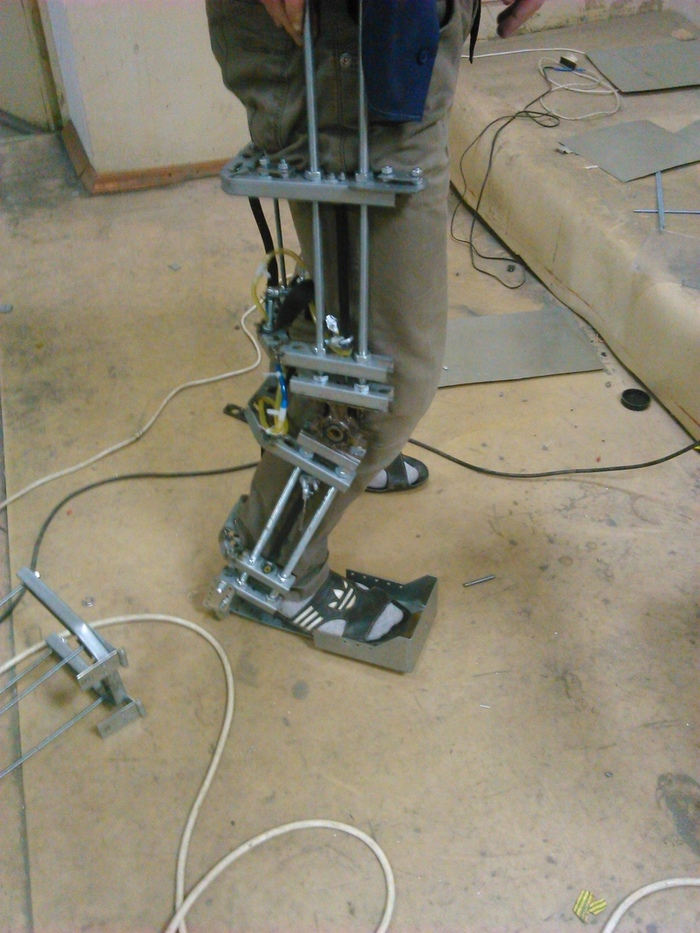
Осталось сделать ноги с обшивкой и экзоскелет готов!
Самая сложная часть ноги это коленный сустав. Вот так он выглядит. Их нужно сделать 4 шт. Соединяется он с помощью сварки.

Фотография несколько смазана, но принцип увидеть можно. Это просто подшипник в зажиме и ограничитель хода. К подшипнику навариваются, по сути, держатели и через них идет крепление к ноге.
Если не делать ограничение хода то появляется вероятность повреждения ноги пилота.
Каркас ноги состоит из 4 подковообразных элементов. Все их размеры также подгоняются под конкретного человека. Все 4 элемента имею разные размеры. Скрепляется всё шпильками 10-12 мм, причем выводим 2 шпильки на длину бедра. Через них нога и будет крепится к шаровой опоре бедра.

Вариантов как сделать ступни было 2. Первый состоял в использовании уже готового элемента.
Это был более простой и быстрый способ. Для такой ступни нужно было только 4 элемента: Один стальной держатель для бруса, стальная пластина под ступню и 2 уголка для крепление к ноге. Крепится все должно было с помощью обычных портфельных шлейфов и замков.
Второй вариант заключался в изготовлении из пластин более аэргономичной конструкции. На этом варианте мы и остановились.

В этой ступне все элементы это просто 4 мм сталь, изогнутая и подогнанная под ногу. Элементы провариваются.
Ноги также имеют приводы. По 2 на ногу. Они позволяют удерживать статичное состояние или же подняться. Одна группа мышц расположена в бедре и тянется от каркаса бедра к верхней подкове ног. Мышцы как бы тянет вперед ногу.
Вторая группа мышц расположена прямо в каркасе ноги. Эта группа при активации «стягивает» ногу. Шланги идут к спине, к клапанной группе.
Управление ногами осуществляется через кнопки расположенные в «лодыжке». Т.е. мы тянем ногу назад и нажимаем кнопку.
Как и в случае с рукой ведем провода к клапанам. Руки используют только 2 из 5 контактов джойстиков поэтому можно приделать какое-то оборудование. Или же перевести управление ног на руки.
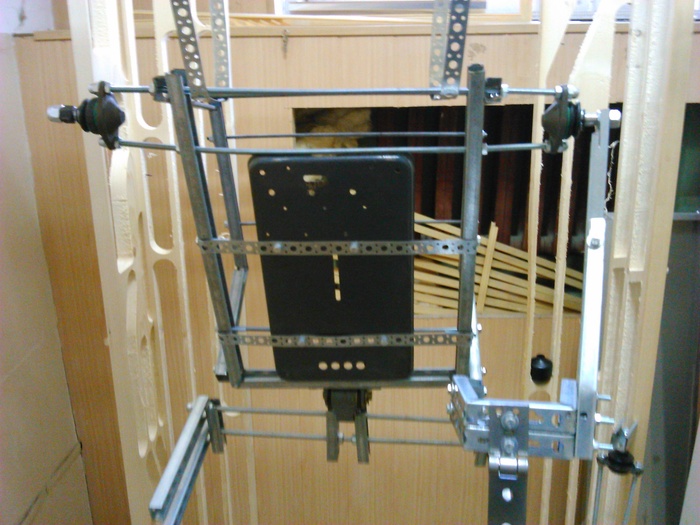
Для зашиты всей пневматики от повреждений и защиты пилота от пневматики весь экзоскелет покрывался противоударным ПЭТом.
ПЭТ это что-то типа толстого спрессованного полиэтилена. Является антивандальным покрытием. Покрываем пластиком места непосредственного расположения пневматики и участки контакта с пилотом. Крепим саморезами и болтами.

В обшивку ног устанавливаем кнопки для управления. Тут их лучше видно. Верхние кнопки управляют бедренными приводами. Провода и трубки лучше поместить в какую нибудь гофру или же другой шланг — их так много что велика вероятность случайно задеть.

Для того чтобы экзоскелет можно было легко одевать и снимать в качестве держателей пилота используем портфельные лямки.

Скелет готов! Само собой это не 146% точное руководство по сборке т.к. многое было не сфоткано, да и времени много прошло, но основные моменты для сборки я считаю освещены.
Источник
Экзоскелет

Астраханский Государственный Университет, Графическая часть дипломного проекта на тему «Экзоскелет с управлением при помощи датчиков мышечной активности» Астрахань 2013
Графическая часть содержит сборочный чертеж, чертеж общего вида экзоскелета, деталировку различных элементов. Идея модернизировать человека, соединив его с неким механизмом, стала будоражить умы ученых еще несколько веков назад. Считается, что ближе всего к воплощению этой идеи подошел в середине XVIII века математик и музыкант Жак де Вокансон, который создал целый ряд чудных изобретений, включая утку-киборга и настоящего робота, играющего на флейте. К сожалению, об этих механизмах мы можем только прочитать — они были унесены в небытие Великой французской революцией. В историю Вокансон вошел как создатель первого в мире полностью автоматического ткацкого станка, использующего в качестве программы металлические карточки.
Первые реальные экзоскелеты были построены военными и медиками почти одновременно — в конце 60-х годов прошлого века. Специалисты General Electric по заказу американского агентства DARPA, занятого разработкой футуристических проектов для Пентагона, создали железного Hardiman. Техническое задание было смелым: экзоскелет должен позволять человеку оперировать с грузами весом до 700 килограммов. В случае удачного завершения проекта экзоскелет Hardiman имел бы замечательные перспективы. Так, военные предполагали использовать новую технику для облегчения работы техников в военно-воздушных силах, которые сегодня вручную цепляют тяжеленные бомбы и ракеты под крылья самолетов. Кроме того, «в очереди» стояли атомщики, строители и представители самых разных отраслей.
Но даже через 10 лет после начала программы инженерам General Electric так и не удалось воплотить в металле все задуманное. Было построено несколько прототипов, в том числе и рабочая механическая рука.
Состав: Экзоскелет СБ,ВО, Спецификация, Деталировка (ОПУ, Вал),Стопа СБ, амортизатор СБ 
Источник
Самодельный экзоскелет из доступных материалов

В данном обзоре автор показывает процесс изготовления самодельного экзоскелета для мастера-ремонтника. Устройство помогает сделать руки невесомыми.
Это очень удобно при выполнении целого ряда ремонтно-строительных работ, когда руки долгое время подняты над головой или находятся в выпрямленном состоянии перпендикулярно туловищу.
С помощью экзоскелета можно проводить работы длительное время, при этом руки в поднятом состоянии не будут уставать, что позволит повысить производительность работ.
Например, данное устройство пригодится при выполнении электромонтажных работ (особенно под потолком), а также в процессе проведения различных ремонтных и отделочных работ. Также экзоскелет может пригодится и дачникам в процессе сбора ягод.
В общем, это довольно универсальное приспособление, которому можно найти применение в самых разных сферах.
Особенности конструкции устройства
Основным элементом самодельного экзоскелета является мебельный газлифт на 12 кг. Помимо этого, нужны будут алюминиевые трубки и элементы шарнирной системы.

Что касается шаровой опоры, креплений и шарниров, то их автор сделал с помощью 3D принтера. Однако все используемые детали можно сделать и из других материалов.
Для изготовления экзоскелета на одну руку потребуется две алюминиевые трубки, газлифт и шарнирные элементы, включая опорное ложе под руку.
Газлифт вставляем в первую трубку и фиксируем с помощью винтов. На другом конце этой алюминиевой трубки автор закрепляет шаровую опору.


Вторую трубку крепим перпендикулярно первой при помощи самодельного шарнира.


На конце второй трубки крепится ложе под руку (его автор тоже сделал на 3D принтере). На последнем этапе натягивается тросик.

Подробно о том, как сделать универсальный экзоскелет ремонтника, можно посмотреть на видео ниже. Данной идеей с нами поделился автор YouTube канала Shayter Andrey.
Источник



